近景摄影测量相对控制算法研究与应用
2021-12-16邓俊
邓 俊
(苏交科集团股份有限公司,江苏 南京 210017)
0 引言
随着数码相机,以及计算机技术的发展和应用,近景摄影测量的发展也愈加迅速[1]。采用数码相机获取物方监测点的数字影像,使用近景摄影测量方法对影像进行数据处理,为数字摄影测量工程应用提供新思路。相对定向是近景摄影测量关键技术之一,其精度直接决定模型精度和最终立体测量精度[2]。非量测数码相机具有价格较低,信息处理工作效率高,适应性强等优点,在数字近景摄影测量领域中有着非常广泛的应用[3]。但普通数码相机属于非量测相机,其内方位元素无法直接测定,也存在较大光学畸变差[4]。另外,在土木工程变形监测过程中由于摄影测量复杂环境条件因素影响,在快速施工测量中无法建立稳固的控制点,一定程度上影响摄影测量三维坐标的解算精度。
同时,在有些测量中,如:地下工程中沉降收敛变形监测、大桥挠度检测等的物方监测点绝对位置对于结构物安全影响不明显,而更为关注的是其相对位置或变化量;此外,在快速施工测量中也无法建立固定控制点[5]。综上,现研究了一种近景摄影测量相对控制算法,利用相对控制方式,可获得大量物方监测点间的位移变形情况,可广泛应用于桥梁、隧道、公路边坡等工程监控量测中。
1 近景摄影测量相对控制算法
1.1 相对定向元素解算
近景摄影测量相对控制算法的核心是采用相对定向工作原理,即以左像片的像空间坐标系当做该像片的像空间辅助坐标系,右像片相对于该坐标系作相对定向元素变化,其相对定向元素分别为BY、BZ、ψ、ω、κ。BY、BZ为线性元素,ψ、ω、κ 为角元素。将BY、BZ转换为角度表示为:
按照近景摄影测量工作原理可简化得到解算公式为:

其中:

由上述解算公式得到相应的误差方程式为:

式中:X2、Y2、Z2、N2、BX为已知数,dμ、dν、dφ、dω、dκ为待定改正数,q 为常数项,q=N1Y1-N2Y2-BY。
通过拍摄6 对及以上的同名像点影像坐标即可进行最小二乘平差计算相对定向元素。其矩阵方程式为:
V=AX-L,P=1
相应的法方程为:
ATPAX=ATPL
法方程的解为:
X=(ATPA)-1ATPL
1.2 模型点坐标解算
模型点坐标解算时,采取模型点坐标取平均的方法,可有效地消除相对定向过程中残余视差对于解算模型点坐标的影响:

式中:N1为左像点投影参数;N2为右像点投影参数。
1.3 相对定向模型比例系数解算
由于相对模型间大小和位置基本不一致,其模型点三维坐标是无法正常比较的,但模型上某些关系如距离、大小等是保持不变的,相对定向模型与物方监测点之间具有一定的比例系数。
物方监测点距离值可直接通过人工测量等方式求得。比例系数为相对定向模型距离值A 与物方距离值B 的比值。


1.4 相对定向模型变形精度解算
通过解算比例系数,相对定向模型可转化成中间模型。可先解算各中间模型中误差,进而求得相对定向模型间变形精度。
式中:m 为相对定向模型间变形精度;n 为距离校核数。
1.5 相对定向精度解算
选取实际工程部分距离作为校核条件,解算实际距离与中间模型距离的中误差。距离相对精度为距离中误差与摄影距离的比值。

式中:λ 为距离相对精度;L 为摄影距离;n 为距离校核数;B1、B2为校核距离与中间模型距离。
距离相对精度λ 越小,相对定向模型与物方监测点相似度越高,相对定向精度越高;反之,相似度越低,相对定向精度越低。
2 实验应用
该项实验在室内三维控制场进行,实验摄影使用的数码相机型号为Canon EOS-1D s Mark Ⅲ,焦距采用35 mm,像幅为36 mm×24 mm(5 616×3 744像素),摄影距离约7.5 m。室内三维控制场标志点数量满足要求,位置分布均匀,且放置在一条竖直线上,标志点见图1 所示。标志点间距离值可直接通过人工测量方式求得,测量精度控制在0.2 mm 以内。

图1 标志点示意图
实验利用4 组像对进行近景摄影测量相对控制算法验算,采用手持摄影机进行双向摄影,拍摄像片见图2 所示。

图2 室内三维控制场双向摄影图
实验距离段数共40 个,采用近景摄影测量相对控制算法解算出的相对定向元素见表1 所列。
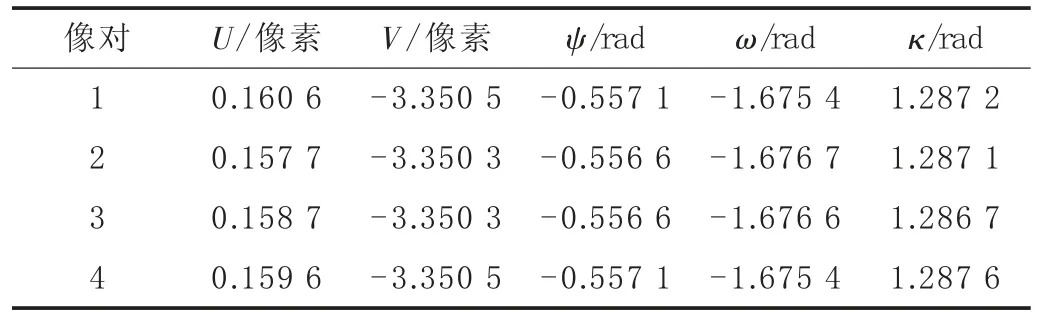
表1 相对定向元素解算一览表
不同距离控制数解算出的比例系数见表2 所列。
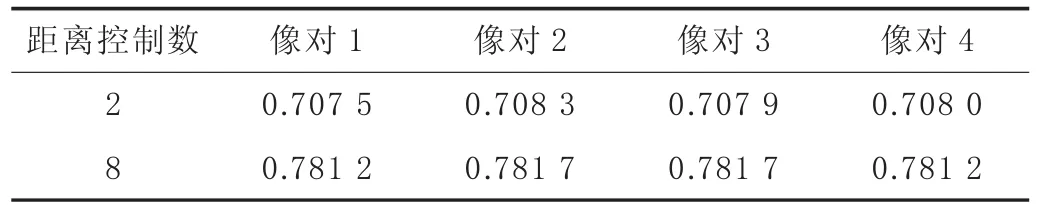
表2 比例系数解算一览表
不同距离控制数解算出的距离相对精度见表3所列。

表3 距离相对精度一览表
不同距离控制数相对定向模型变形精度见表4所列。
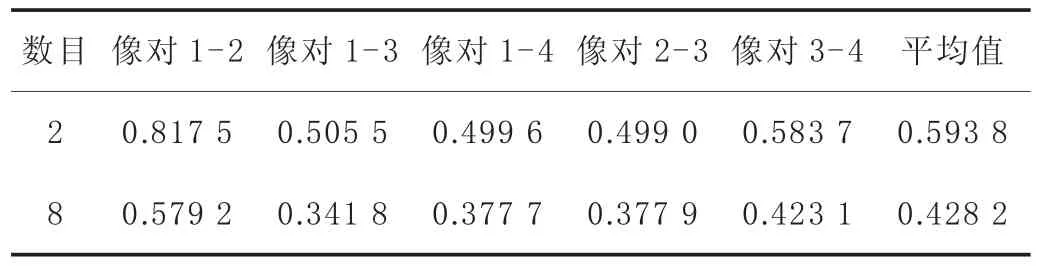
表4 相对定向模型变形精度一览表 mm
由表3 可知,采用该项研究的近景摄影测量相对控制算法解算出的距离相对精度较高,表明相对定向元素解算准确。同时,实验结果表明随着距离控制数的增多,距离相对精度随之增高,则解算出的相对定向元素则越准确可靠。
由表4 可知,采用近景摄影测量相对控制算法解算出的不同距离控制数相对定向模型变形精度较高。实验结果表明相对定向模型变形精度随着距离控制数的增加而增高。
3 结语
结合近景摄影测量基本工作原理,通过实验场地数据验证,研究了一种近景摄影测量相对控制算法。该算法利用数码相机拍摄工程实验场地的数字影像,采用相对控制方式,可获得大量物方监测点间的位移变形情况,具有外业数据采集简单快捷、内业处理数字化等特点,实验证明具有较高的精度和可靠性。现总结了近景摄影测量工程应用新思路,并提出了近景摄影测量相对控制算法在土木工程变形监测中的新技术,可广泛应用于大桥挠度、隧道沉降收敛、公路边坡等工程监控量测中。
