预警自修复式联动救援限高系统研究
2021-12-16林理科刘享浚
林理科,曾 超,2,刘享浚
(1.重庆交通大学交通运输学院,重庆市 400074;2.重庆市规划设计研究院博士后工作站,重庆市 401147;3.重庆市求精中学,重庆市 400010)
1 研究背景
近年来,我国进入了新基建时代,5G、大数据、物联网、云计算等智慧创新领域的新型基础设施体系,将交通运输业推向生态化、数字化、智能化方向发展[1]。随着基础设施和运输装备不断改善,大型客车、大中型载重汽车保有量迅速增加。为保证桥隧设施运行安全,常在城市高架路匝道出入口、公铁跨线桥处设置限高装置。但因车辆驾驶员疲劳驾驶、限高架高度设置存在工程误差,以及车辆超高通过而导致限高架伤人事故频发,造成了一定的社会经济损失,如图1 所示。

图1 限高架事故现场图
2019年,全国有报道的限高架碰撞事故累计49起。2020年截至11月共发生37 起,造成19 人死亡,直接经济损失达2000 万元。
针对现有限高装置设计缺陷,优化、改进限高装置的工作原理,对降低事故风险、减少事故损失尤为重要。
2 新型限高系统
2.1 研发思路
传统限高架现存在以下问题:(1)超高检测手段缺失;(2)拦截方式强制被动;(3)拦截装置刚性过强;(4)事故信息通报不及时;(5)救援不畅、难以预防等[2]。
针对以上问题,本文提出的预警自修复式联动救援智能限高架运作体系共分3 个阶段:事前预警(Ⅰ)、事中缓冲(Ⅱ)和事后救援(Ⅲ)。系统各部分配合运作流程如图2 所示。
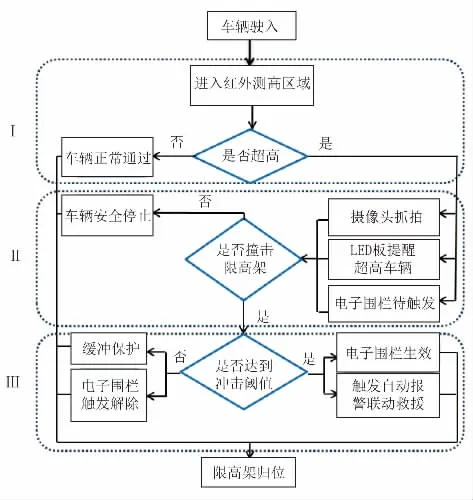
图2 系统运作流程
2.2 研究内容
2.2.1 事前预警阶段
在设置限高架路段的道路与桥梁前安置车高检测系统。该系统的核心技术为红外线激光检测设备。当车辆未超高时,接收端正常接收到红外线信号,车辆顺利通过。当车辆超高时,超出的部分会阻挡红外线到达接受的另一端,被阻断的红外线信号会转化为电信号,控制限高架上的摄像头进行拍照,并将识别出的车牌号投放到LED 显示屏上。与此同时,交通警示灯黄灯连续闪烁,在保证驾驶员和驾驶车辆安全的情况下,对驶来车辆进行再次减速提醒,提醒驾驶员禁止前行并靠边停下。
2.2.2 事中缓冲阶段
依通过分析车辆水平碰撞力F,F 由车速v、碰撞角度θ,汽车质量m(kg),护栏变形值D(m)、车辆重心距前保险杠距离C(m)、车辆宽度b 等因素决定[3]。

根据式(1)可计算得到限高架和车辆端部所受应力,得出限高架横杆和车辆前端碰撞后的应力变形,如图3、图4 所示。

图3 限高架横杆应力变形图

图4 车辆端部应力变形图
该部分改进,可采用可水平运动的限高架结构。在限高架的侧面安置滑轮组,用钢索连接限高架与埋入地下的缓冲装置,避免影响结构自身的稳定性。轨道两侧设置为外高内低的结构,保证限高横杆在外力的作用下不会因车辆高速撞击导致滑轮脱离轨道。滑轮与限高横杆间可转动,使限高横杆的任意位置在受到车辆的撞击后,自身仍能以一定的倾斜角度继续前进,且不会对轨道产生破坏性的横向力。
自修复式结构借助重力装置的重力和弹簧弹性势能间的转化将限高架横杆复位。实现该功能也可以采用电机驱动或者液压装置,需结合实际情况,根据不同道路等级、限制车速和环境因素进行调整。
张均、张垍为唐朝玄宗时期的宰相张说之子,颇受唐玄宗器重,分别在朝中担任过重要官职。张均为张说长子,曾任大理寺卿一职;张垍为张说次子,为当朝驸马。二人在安史之乱中投靠于安禄山,并分别在其军中担任伪中书令、宰相之职。安史之乱被平定之后,二人结局或死或发配。但究竟孰死孰生,《资治通鉴》记载与《旧唐书》《新唐书》《册府元龟》记载并不相同。
2.2.3 事后救援阶段
当车辆撞击限高横杆后,智能救援系统启动,将车辆信息和事发情况发送至联动救援平台,及时通知公安、交管、医疗救护、消防等部门开展救援。同时,为避免二次事故发生,压力感应片感应到车辆撞击压力后,沿途所设电子围栏显示红灯,暂时禁止后方车辆进入。其中,基于限高架与车辆的有限元三维碰撞模拟模型设定检测阈值。当阈值小于车辆撞击限高架的检测应力值时,智能救援系统和沿途所设电子围栏同时启动。
2.2.4 其他功能
由于城市部分道路的限高要求根据时间段可发生变化,本文提出的智能限高架同时具有升降功能。通过改造限高架横梁与基架的连接方式,采用可滑动的导轨连接,利用计算机控制在特定时间段实现一键升降[4]。
2.3 技术要求
本系统的主要工作原理为:当车辆驶入时,用光电传感器来判断车辆是否超高。若没有超高,车辆正常通过。若车辆超高,红外线信号控制摄像头抓拍车牌,投送至LED 屏,提醒司机已超高;电子围栏显示黄灯,提醒后方车辆减速。若车辆未及时制动,用缓冲系统装置缓冲车辆的撞击能量,阻止车辆继续前进。当撞击检测值超过设定阈值时,便会触发自动报警联动救援装置。
其中涉及的主控单元、光电传感器、压电传感器、信息采集模块、显示模块和电机驱动等的具体参数分析如下。
2.3.1 主控单元
2.3.2 光电传感
光电传感可采用漫反射光电开关E 3F-DSC 4 红外线感应传感器。它主要由发送器、接收器和检测电路三部分组成。发送器平行发射光束,当车辆未超高时,接收端正常接收到红外线信号。当车辆超高时,超出的部分会阻挡红外线到达接受的另一端,被阻断的红外线信号会转化为电信号,从而可以判别车辆超高[5]。
2.3.3 压电传感
压电传感可采用HX 711 模块,用于当发生车辆撞击限高横杆的事件时,埋入限高架中的压力感应片感应到车辆的撞击压力,系统装置通过压电传感器将压力信号变为电信号驱动电子围栏。
2.3.4 系统控制信息传输
系统控制信息传输采用工业互联网,其将现实世界中的机器、设备、团队和网络通过先进的传感器、控制器和软件应用程序连接起来,从而实现限高架的智能化和信息的远程传输。
2.3.5 信息采集模块
用摄像头ov7670 对车辆抓拍。该摄像头有性能稳定、灵敏度高、图像智能高等优点,可以准确地采集车辆的车牌信息。
2.3.6 显示模块
显示模块项目中使用的是TFTLCD,即薄膜晶体管液晶显示器。通过STM 32 的普通IO 口模拟8080总线来控制TFTLCD 的显示,用于显示摄像头识别出的车牌号等信息。但考虑到成本,可用LED 点阵完成信息的显示。
2.3.7 电机驱动控制单元
电机驱动模块采用L298N 作为主驱动芯片。其具有启动能力强、抗干扰能力强的特点,可以驱动感性负载,如大功率直流电机、步进电机、电磁阀等,特别是其输入端可以与单片机直接相联,从而很方便地受单片机控制。用此模块控制限高架的升高与下降,可以实现不同时期限制不同高度的车辆通过。
3 结语
本文针对现有限高架设计存在的缺陷及运用管理体制不完善等问题,基于驾驶员的视觉特性和反应特性,结合结构力学、信号识别及模拟仿真等技术,提出限高架进行事前、事中及事后3 个部分的改进思路,创新性地提出具有预警功能、自修复式功能及自动报警功能的新型智能限高架,以解决现有限高架存在的警示性不强、事故报警不及时及结构简单等问题,从而降低碰撞冲击力度,减少司乘人员伤亡,为进一步完善实体限高装置的研发提供参考。
