基于旋转永磁信标的相位式空间目标定向机理及实验研究∗
2021-12-15博杨宾峰向枫桦赵震郭娇娇
李 博杨宾峰向枫桦赵 震郭娇娇
(空军工程大学信息与导航学院,陕西 西安710000)
目前,随着现代科学技术的发展,导航技术在各个领域被广泛应用。就我国目前导航技术的发展情况来看,主要的定位手段有无线电导航[1-3]、惯性导航[4-5]、卫星导航[6-7]、天文导航[8-9]等。 其中惯性导航能够不受地域、天气的影响自主定位,但在定位过程中存在误差积累,需要借助其他高精度导航手段对位置信息进行校准。卫星导航虽然定位精度高,但是在地下和水下等特殊环境中应用受限,遇到复杂电磁环境时易被干扰。天文导航虽然具有高自主性和抗干扰性,但由于受环境和测量方法等因素影响,有时也会产生较大误差。
相对于以上导航手段而言,磁导航是能够同时满足自主式、无积累误差且抗干扰能力强的新兴导航手段。目前磁导航主要分为两类:地磁匹配导航和人工磁信标导航。地磁匹配导航是利用地球磁场特征的无源自主导航手段,随着地磁理论的不断完善、磁敏感器技术的不断提高以及导航算法的日趋成熟,该导航技术得到快速发展。赵敏华等人[10]提出了一种基于EKF的地磁导航算法,有效解决了有色噪声干扰问题;荣思远等人[11]将UKF算法用于磁测自主导航,提高了定位精度;施桂国等人[12]以地磁场矢量和飞行高度作为观测值,设计了基于UKF算法的地磁导航滤波方案。因为地磁场稳定存在,不易被干扰,所以地磁匹配导航具备全天时、全天候和全地域存在的特点,但其方法自身需要高精度磁强计、庞大完善的地磁场模型和足够完善的算法做支撑,所以地磁匹配导航精度很受限制。另一个手段是人工磁信标导航,是一种利用经过特殊设计的人工磁信标产生的特定调制磁场进行定位的新思路,与地磁匹配导航存在本质区别。由于该方法不需要庞大完善的地磁场模型,而且抗干扰能力强,隐蔽性好,应用方便,所以有着广阔的应用前景,各类研究学者对此方法做出了探究。国外方面,Paperno等人[13]提出了一种基于准静态旋转磁场的新的磁位置和方向跟踪方法,提高了磁跟踪的速度和精度;密歇根大学[14]提出了一种电磁信标和惯性导航传感器定位技术,大幅度提高了自主导航定位的精度;国内方面,张大成[15]设计了磁信标定位系统的软硬件系统,利用四参数正弦信号重构方法提高辨识精度;邓国庆[16]借助磁场梯度张量算法,将磁信标定位应用于水平定向钻进实时定位中,提高了定位精度;王润[17]从磁信标结构出发对信源结构进行设计优化,为磁导航定位信号传输距离有限、信号提取困难提供了有效的解决方案。以上研究都是通过探测磁场幅值进行目标定位,但是在幅值测量会受到其他异常场的影响,导致定位精度不够高。由于相位式测角自身具有不易被干扰,精度高的特点,提出一种基于旋转永磁信标的相位式空间目标定位机理。
本文在实验研究过程中首先对单个永磁体和组合永磁体分别进行仿真分析,得到组合永磁体不仅磁场强度大而且性质与单个永磁体一致,接着在仿真中将组合永磁信标匀速旋转,探究飞行器的飞行状态与磁信号相位间的关系,最后借助实验室的仪器进行实验验证,得到与仿真一致的结论,飞行器在不同方位不同姿态下探测到的磁信号的相位信息能够与其位置信息对应起来,为基于旋转永磁信标的相位式空间目标定位机理的可行性提供了理论支撑。
1 永磁体磁场分布
根据毕奥-萨法尔定律的描述,某一电流元I d l,如图1所示,在空间任意一点P(x,y,z)处所产生的磁感应强度的表达式为:
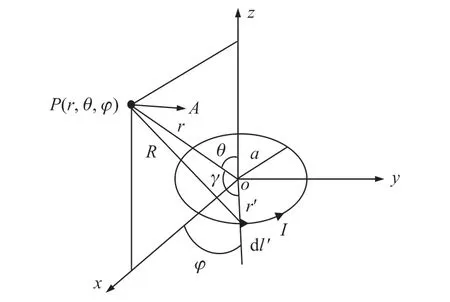
图1 电流元在空间任一点的磁感应强度

将电流回路产生的磁感应强度看作各电流元产生的磁感应强度的叠加,即可得到P点处的磁感应强度:

磁力线[18]是一种用来形象地表示磁场矢量空间曲线,曲线上每一点的切线方向与该点磁感应强度的方向一致。那么长度,d l等效于磁力线长度元,且方向与B的方向一致,因此磁力线的方程可以表示为:

对应到球坐标中可以得到:

对式(4)进行积分可得:

当n取不同值时可以得到一簇磁力线,分布如图2。

图2 磁力线分布
从图2中可以看出靠近磁极的地方磁力线分布密集,两侧的分布稀疏,所以根据公式推导和仿真结果可以得出在距离永磁体中心点等距的圆上进行测量,轴向磁场强度要大于径向磁场强度,理论上可以得到一个类似于无线电导航中的“8”字形方向性图。
工程中常用的永磁体有球型、正方体型和圆柱体型,本文利用COMSOL多物理场仿真软件对永磁体进行仿真,得到磁场分布图3。从图3可以看出永磁体的磁场从N极指向S极呈两极密集,两侧稀疏的分布规律,与公式推得磁力线分布规律一致。

图3 永磁体磁极、磁场的分布
以永磁体中心为圆心做圆,沿圆周测量得到图4。从图4可以看出永磁体沿平行于轴向的平面上磁场的分布大致呈“8”字型,与公式推导得到的结论一致。
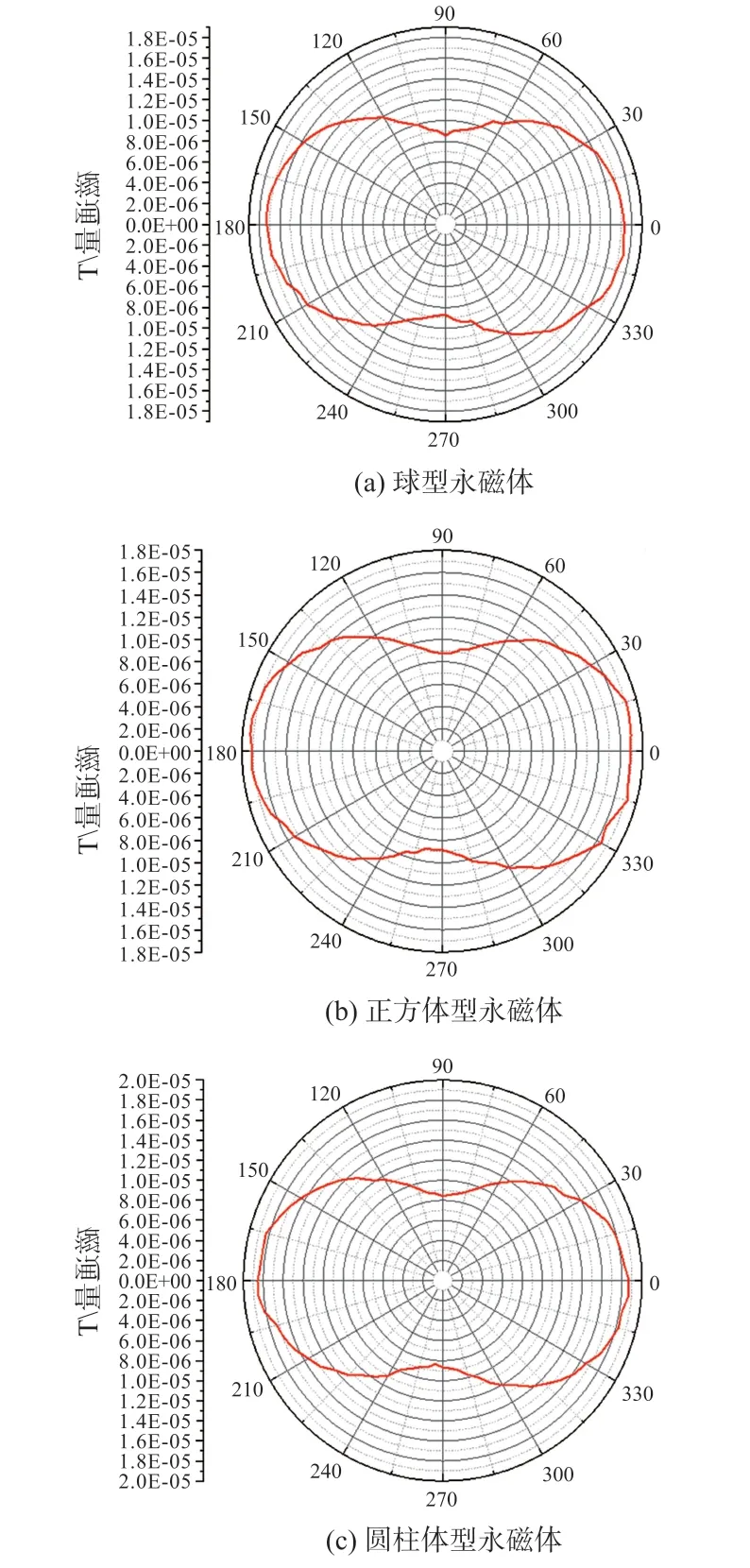
图4 处磁通量分布(1 m)
2 永磁信标结构的优化设计
2.1 单永磁体信标形状的选择
为了实验得到更好的实验效果,首先利用COMSOL多物理场物理仿真软件仿真等体积V=116 cm3的球型、圆柱型和正方体型永磁体在相同剩磁量的设置下的磁场大小。仿真中设置球的半径r=297 mm,正方体的边长a=479 mm,圆柱体的底面半径r=15 mm,高h=156 mm,选取距各结构中心1 m处的磁场进行测量,如图5所示。
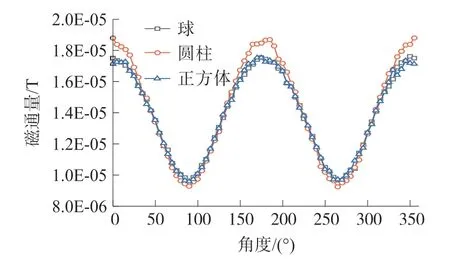
图5 处磁通量分布对比(1 m)
由图5可以看出,在等体积下相同取值范围内,圆柱体型永磁体的磁场强度更大,实验效果更好。
2.2 单永磁体信标尺寸的选择
永磁体的磁场强度是由其形状、尺寸、材料等参数决定的,所以在选择圆柱体的基础上还需要对其结构进行进一步优化。本文选择钕铁硼[17]作为永磁体材料。设置圆柱体各项参数的初始值为:底面半径r=15 mm,高h=156 mm,考虑到圆柱体型永磁体工艺制作,其结构不能过细,所以这里分别取r=10 mm,r=15 mm,r=18 mm和r=20 mm进行仿真得到如图6所示的幅值曲线。
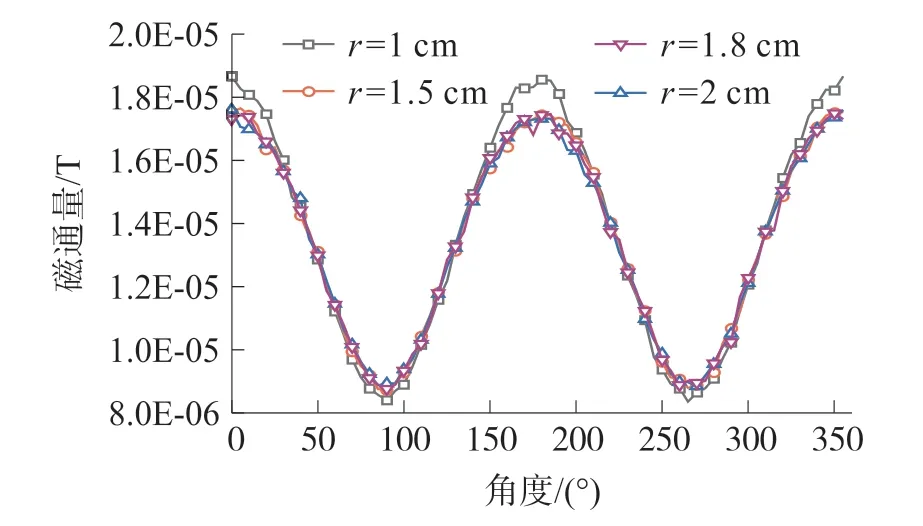
图6 同体积不同底面半径
由图6分析可得,当r=10 mm时永磁体的磁场强度最大,效果最好,所以后面实验中的圆柱体结构参数为:底面半径r=10 mm,柱高h=375 mm。
2.3 组合永磁体设计及分析
根据文献[19],组合体永磁信标相较于单个永磁体能有效增大磁场,前面对单个永磁信标的相位敏感性进行了验证,但是其自身产生传播距离足够远的磁场也是无法弥补的缺点。通常为了增加磁棒的磁性,会在永磁体自身的结构、材料上进行改进,本文中选用的铷铁硼材料是目前常用的磁性最大的材料,对比制作更大尺寸的永磁体,增加永磁体数量进行组合更为直接方便。所以选择平行和垂直两种组合方式进行验证,结构如图7所示。为了保证仿真与实验的一致性,在平行结构中,两根永磁体沿y轴方向上间隔220 mm,在垂直结构中,两根永磁体沿z轴方向上间隔90 mm。

图7 组合体结构
将组合永磁体沿中心旋转一周可以得到如图8所示的幅值曲线,图8(a)表示的是平行结构和单个永磁体的幅值曲线,图8(b)表示的是垂直结构和单个永磁体的幅值曲线。图8可以看出在同一个测量点处平行结构的磁场强度大概是单个永磁体的3倍,垂直结构的磁场强度大概是单个永磁体的0.75倍;而且综合来看平行结构产生的磁场强度要大于垂直结构,磁场变化幅度也是平行结构的更明显,更有利于信号相位变化的探测。所以通过仿真实验可知组合永磁体要比但永磁体性能更好,平行结构要更优于垂直结构。

图8 单、双永磁体结构对比
3 飞行姿态与信号相位的关系
飞行过程中现实情况是复杂多变的,飞行器的飞行状态随时会改变,为了尽可能还原飞行时磁力仪的测量状态,实际验证过程中,令永磁信标按一定方式一定速率旋转起来,改变磁力仪的位置信息进行测量同时验证其中的规律。根据第二节实验结论,本节采用平行结构双永磁体作为磁信标。
通过学习无线电导航系统的基础知识可以知道导航中常用的角度参量有:①航向:指飞行器纵轴首端的水平指向;②方位:指飞行器与磁信标间的相位位置方向;③俯仰:指飞行器纵轴指向与水平方向间的夹角;④横滚:指飞行器横轴指向与水平方向间的夹角。在目前的实验条件下,可以对方位角、俯仰角和横滚角进行模拟实验。验证过程主要分成三个部分:一是保证飞行器水平状态,改变其相对于磁信标的方位;二是调整飞行器的俯仰角,并改变其相对于磁信标的方位;三是保证飞行器水平状态,调整飞行器的横滚姿态,再依次改变其相对于磁信标的方位。
3.1 水平方位角与信号相位的关系
首先在COMSOL多物理场仿真软件中,以x轴为测量0刻度点,分别设置0°、30°和330°三个测量点,将永磁体旋转一周并测量磁通量,绘出曲线图9。

图9 不同水平方位角的磁通量
从图9可以看出,圆形标注曲线代表测量点在距磁信标轴向偏正30°的方向,方形标注曲线代表测量点正对磁信标轴向方向,三角标注曲线代表测量点在距磁信标轴向偏负30°的方向。并且三条曲线的幅值变化基本一致,左右两侧曲线分别相对于中间曲线在角度上相差30°,所以可以看出当磁信标以固定频率不停的旋转时,位于不同方位的飞行器所测到的磁信号在相位上的变化与方位上的变化是能够保持一致的。
3.2 俯仰角与信号相位的关系
在实际飞行中,飞行器是不会与磁信标保持在同一水平面的,所以俯仰角是不能忽略的一种飞行姿态情况,所以为了验证相位式测角定位是否可行,需要验证俯仰角的变化对方位角信息和信号相位信息间的关系的影响程度。
与水平方位角实验验证方法一样,首先利用COMSOL多物理场仿真软件进行仿真实验。建立模型时将永磁体以原点O为中心,沿Y轴在xoz面上旋转30°来等效飞行器俯仰30°的飞行姿态。由于实验仪器自身的限制,这里只能对有限俯仰角情况进行模拟实验。实验过程中仍是通过旋转永磁体来等效飞行器的俯仰情况,为了保证仿真和实验的一致性,这里角度分别选取1°、2°、3°、4°和5°,并分别在各个俯仰角情况下改变方位角,通过匀速旋转永磁体得到0°、30°和330°方位角处1°~5°俯仰角对应的幅值。首先对0方位角处进行俯仰角变化的仿真,得到图9。
从图10中可以看出俯仰角的变化对飞行器的磁信号接受并没有太大影响,接下来对0°、30°和330°方位角情况进行对比得到图11。从图11(a)~11(e)五幅图可以看出飞行器在做俯仰角度变化时不会影响其方位角信息与磁信号相位信息间的对应关系。

图10 不同俯仰角的磁通量

图11 不同俯仰角不同方位角
3.3 横滚角与信号相位的关系
飞行器的横滚角姿态直观来看就是机翼围绕纵轴偏转的角度,这也是飞行器在飞行过程中常见的姿态。在对横滚角仿真实验中依旧是改变永磁体的坐标系来等效于飞行器的横滚状态,但是由于实验仪器的限制,只能对有限角度进行模拟仿真。
选择5°横滚角时在0°、30°和330°方位上进行仿真,得到图12。由图可以看出横滚角不会影响其方位角信息与磁信号相位信息间的对应关系。

图12 5°横滚角不同方位
4 实验验证
为了保证结论的可靠性,还需要借助实验系统进行实物模拟实验。实验系统如图13所示,由磁信标、无磁转台和数据采集系统三部分组成。无磁转台分为外框、中框和内框,实验中通过改变三个框的角度来调整永磁体的姿态,可以等效为永磁体位置固定时飞行器相对于永磁体姿态的变化情况。数据采集系统由三轴磁通门传感器及其数显端、数显管和PC端组成。其中三轴磁通门传感器可以感知某点处X、Y、Z 3个磁场分量并将数值实时显示在数显端,数显管可以显示无磁转台三个框的角度信息,最终所有数据信息汇总在PC端进行处理。

图13 实验系统
4.1 水平方位角与信号相位的关系
在无磁转台中心放置永磁信标,为了模拟飞机在不同方位角上磁通量的测量差异,实验中将磁测计分别摆放在0°、30°和330°方向上,高度与永磁体中心点齐平,磁力仪的量测坐标以y轴为垂直于水平面的方向放置。通过转动无磁转台内框将永磁体旋转一周,在三个测量点处分别测得对应的幅值曲线如图14,经过计算可以得到3个曲线在横坐标上依次相差30°,分别对应30°方位角、0°方位角和330°方位角。

图14 实测不同水平方位角的磁通量
在实际环境中进行测量时,要考虑到周围环境磁场的影响,所以在幅值和波形包络上会有差异,图14中的曲线相较于图9中的三根曲线幅值要大而且波形也有变化,但是整体的变化规律是一致的,30°和330°对应的曲线相对于0°相位上分别相差30°,与仿真结果一致。所以总结来说,磁力仪接收到的旋转磁信标发出的磁信号是能够与其目前相对于磁信标方位信息构成对应关系,进而说明飞行器通过感知磁信号的相位变化来判断自身方位的思想是可行的。
4.2 俯仰角与信号相位的关系
实验中将磁力仪分别摆在0°、30°和330°方向上,高度于磁信标中心点齐平,磁力仪的量测坐标以y轴为垂直于水平面的方向放置。在每个方位处,通过转动中框来改变永磁信标的俯仰,等效成飞行器的俯仰姿态。分别取俯仰角为1°、2°、3°、4°和5°,转动无磁转台内框一周,在三个测量点处分别测得对应的幅值曲线如图15。

图15 实测不同俯仰角不同方位角
从图中可以看出每个方位角处改变俯仰角得到的曲线图其幅值变化规律与仿真得到的幅值变化规律基本保持一致,并且实际测得的数据也显示俯仰角变化对相位测量影响不大。
4.3 横滚角与信号相位的关系
本次实验通过调整中框和内框的角度。使永磁信标轴向方向对准磁力仪,让永磁信标绕轴向转动来模拟横滚姿态。
图16是在0°方位角上横滚角分别取-5°、5°、10°和15°时对应的幅值图。综合分析可以看出横滚角与俯仰角情况类似,对飞行器的磁场模值的测量影响不大,并且能够很好的感应磁信号的相位变化。

图16 实测不同横滚角
5 结论
本文借鉴无线电导航中的相位式测角原理,从传统的对磁信号的幅值的测量转变为对相位的测量。通过仿真和实验同时对永磁体磁场的分布特性、永磁体磁性与其结构的关系,以及飞行器姿态信息对磁信号测量的影响进行探究和验证,得出结论:圆柱体型永磁体相较于同体积下的球型和正方体型永磁体磁性更强,而且通过调整圆柱体的底面半径和高度也可以改善其磁性大小。另外,组合永磁体结构相较于单个永磁体来说具有更强的磁场,也能通过旋转产生稳定的周期性磁信号。当永磁体旋转产生稳定的具有周期性的磁信号时,以不同飞行姿态的飞行器接收到的磁信号之间的相位差异也能很好的反应出该飞行器所在方位信息,这为基于旋转永磁信标的相位式空间目标定向机理的深入研究和下一步应用奠定了理论基础。