一种多波长激光雷达光学系统设计
2021-12-14刘晨凯胡明勇李昭阳孙东起封志伟蔡晓波
刘晨凯,胡明勇,李昭阳,孙东起,封志伟,蔡晓波
(合肥工业大学光电技术研究院,安徽 合肥 230009)
0 引言
大气云与气溶胶在全球气候和环境变换的过程中扮演重要角色[1],常用激光雷达对其进行探测。激光雷达光学系统包含发射系统、接收系统和鉴频系统,接收系统一般为大口径光学系统。大口径光学系统因具有高成像分辨率、强集光能力,广泛应用于天文望远镜、空间成像系统等领域中[2]。望远镜光学系统形式主要有折射式、反射式、折反式,折射光学系统结构简单稳定、体积较小、但很容易产生色差[3],与之相比反射光学系统具有没有色差、工作波段宽、系统焦距长等特点,广泛应用于天文仪器和军事等领域[4]。2018年8月23日,欧空局ESA成功发射全球首颗专用风测绘卫星,搭载ALADZN星载测风激光雷达,其发射波长为355 nm,能量为150 mJ,口径为1500 mm,垂直分辨率为1 km,此测风激光雷达使用双边缘技术对瑞利散射的信号进行测量。2018年Fan等[5]提出了一种355 nm主动激光测风雷达的设计,包括反射式两镜系统加准直聚焦透镜组,但工作波段单一,且视场较小。
激光雷达系统对大口径、检测污染物的要求越来越高,本文设计了一种多波长激光雷达光学系统。本系统采用负-正-负透镜组作为初始结构,根据修正的玻璃p-v值与现有库存玻璃种类来选择玻璃材料,计算各透镜的光焦度分配,使用PW法计算出分束系统初始结构并优化出满足技术指标的激光雷达光学系统。
1 系统设计
多波长激光雷达光学系统由接收主系统和光纤分束耦合部分组成,接收主系统采用卡塞格林[6]结构,后接光纤分束耦合部分,光纤分束耦合部分对多波长的光束进行准直,使用分色片对不同波长的光分束,用一根光纤接收,准直使分色片不产生额外的轴外像差,图1显示了整体光学系统的光路图。

图1 多波长激光雷达光学系统结构图Fig.1 Structure of the optical system of the multi-wavelength lidar
1.1 接收主系统设计
接收主系统放在方舱中,总高度不超过2.2 m,项目要求接收主系统的光学有效口径为680 mm。常用的两反射光学结构有R-C系统、格里高利系统和卡塞格林系统。R-C系统的主次镜都为双曲面,双曲面制造成本高、检测难。当次镜中心遮拦比一样时,格里高利系统的主次镜间距比卡塞格林系统的更长,选用卡塞格林系统。
同轴卡塞格林系统为增加系统透过率,设置遮拦比α=0.25,主镜的有效口径为680 mm,大口径望远镜主镜的相对口径一般取1:2。主镜的相对口径取1:2时,卡塞格林系统的焦距为5379.73 mm,主次镜间距为1020 mm,这个距离较大不便放于车载激光雷达的方舱中,因此选取主镜相对口径为1:1.5,卡塞格林系统的焦距为4000 mm,主次镜间距为770 mm,F数为5.88,卡塞格林系统结构示意图如图2所示。

图2 卡塞格林系统结构示意图Fig.2 Schematic diagram of Cassegrain system structure
1.2 激光耦合原理
光纤分束耦合系统由一根光纤对3种波长的激光进行接收,激光束直径要小于光纤的纤芯直径,激光束的发散角要小于光纤的孔径角,满足光束耦合进光纤的条件为[7]

式中:dlaser是聚焦在光纤耦合端面上的激光光斑直径,dcore是光纤的纤芯直径,θlaser是激光发散全角,NA是光纤的数值孔径。光纤芯径为200 μm,NA=0.22,视场角为±0.0037°。激光会聚角α可由

推出,n是光的折射率,可得α=12.7°。系统焦距可表示为

式中φ是入射光束边缘与光纤轴线的夹角,得到f1=1548.53 mm。
光纤耦合原理如图3所示。
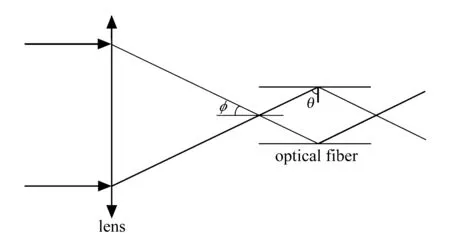
图3 光纤耦合原理图Fig.3 Diagram of optical fiber coupling principle
因需要用分色片把不同波长的光分开,为了同时保证使用分色片时不引入额外的轴外像差,需要对3种不同的光先进行准直。分色片的半径为12.5 mm,放置在与准直光线成135°角的位置;消色差透镜的半径应不超过8.8 mm,取8 mm;焦距按f1=fafc/fb分配,其中fa、fb、fc分别是接收系统、准直系统、光纤耦合系统的焦距。
1.3 聚焦系统光焦度分配
分束系统按聚焦系统计算,聚焦系统会带来色差问题。由于355 nm和1064 nm不在可见光范围之内,常用的F、D、C光消色差公式不适合用于此系统。消色差的谱线分别为λa=355 nm,λb=532 nm,λc=1064 nm,用消色差方程组算出各个薄透镜的光焦度,将透镜组看作薄透镜,方程可表示为[8]
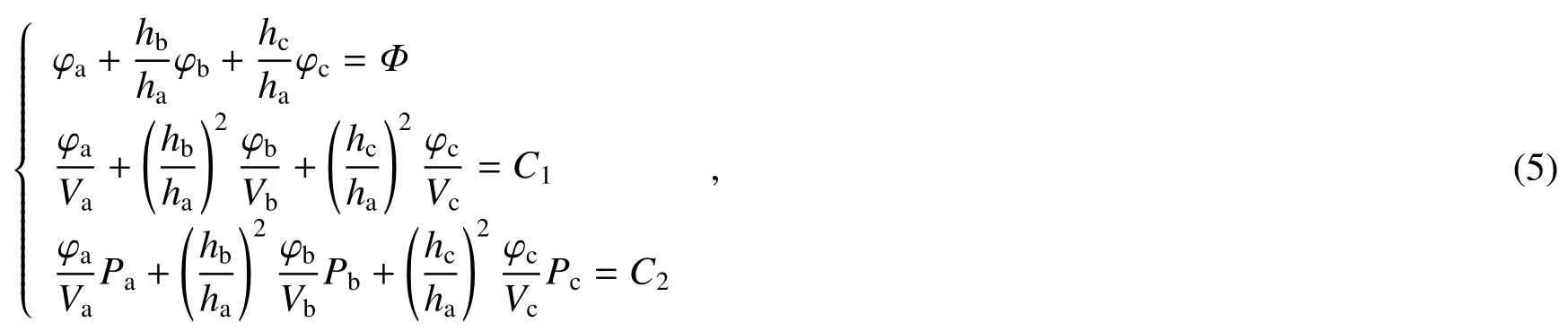
式中:Φ是总的光学系统的光焦度,φi是各个薄透镜的光焦度,Pi为玻璃材料的色散系数,Vi为玻璃材料的阿贝数,hi为光线在透镜上的投射高度,下标i=a,b,c。由于薄透镜组镜间距较小,为方便计算,近似有ha≈hb≈hc≈h,令C1=C2=0,有



表1 玻璃材料P-V值Table 1 P-V value of glass materials
消色差系统设计的关键在于光学初始结构的选取、玻璃材料的选取和光焦度分配等问题。根据设计要求可以选择三分离式结构作为初始结构,引入较小的镜间距作为校正像差的变量,空气间距衍生的高级球差可以使光学系统的带球差减少[9]。根据经验,选择负-正-负透镜组作为初始结构,能够较好地校正初级像差。根据P-V值对材料进行合理选择,对于多波长消色差系统,至少得采用一块特殊玻璃材料以平衡光学系统整体像差,由于CAF2(萤石)的价格高,而且易碎、易潮湿,一般不选用[10]。选用H-K9L、H-FK61、H-LAF52作为玻璃材料组合,修正的P-V值代入光焦度分配公式(6)可求解各个透镜的光焦度分别为:ΦH-K9L=-0.00573、ΦH-FK61=0.0453、ΦH-LAF52=-0.0279。
1.4 PW法求解初始结构
用PW法求解聚焦系统的初始结构,φi是各个薄透镜的光焦度,Vi为玻璃材料的阿贝数,根据消色差要求,在规化条件下有

由(7)式和已求解出三个透镜的实际光焦度解出φ1=-2.298、φ2=3.677、φ3=-0.3795。光纤准直系统中三片式分离结构的基本像差参量中的初级球差和初级慧差为0,在求解初始结构参数时取h1=h2=h3=h,初级球差S1、初级慧差S2的表达式为

因为l1=-∞(物体在无限远处),所以光阑与三片式分离结构的第一片透镜重合,所以有hz=0。(8)式变为

规划条件下设h=1,将由有限远规化到无穷远,表示为则


求形状参数Q1、Q2、Q3,其中A1、A2、A3、B1、B2、B3、C、K1、K2、K3、L表示为
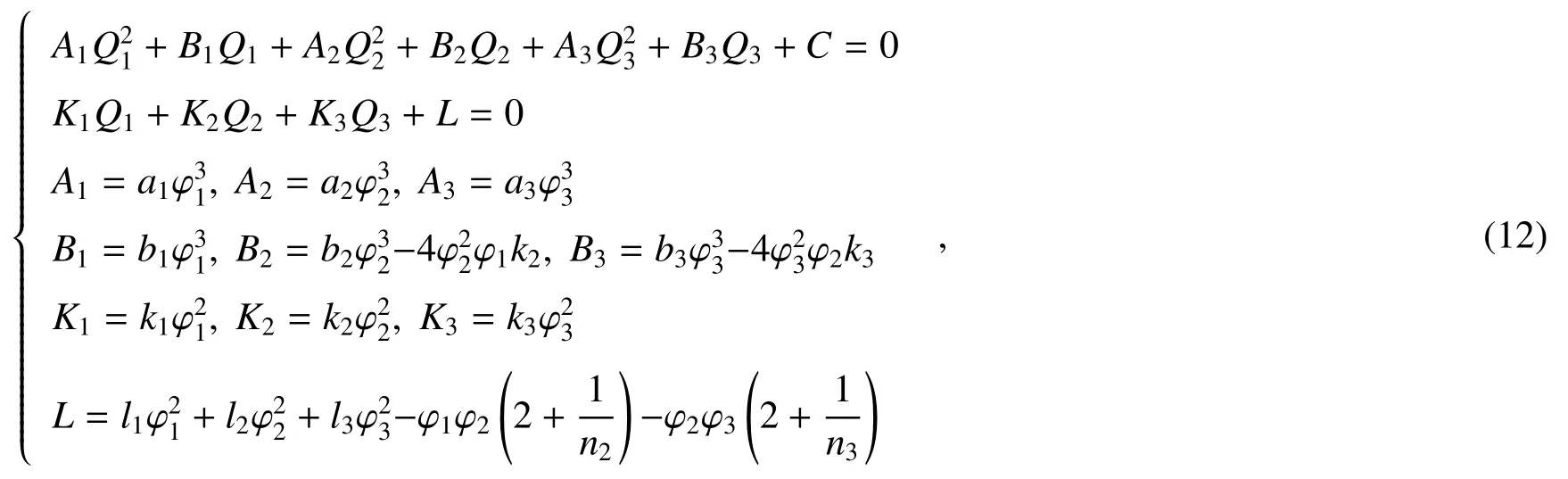
式中ai、bi、ci、ki、li(i=1、2、3)易算出,由 (11)式可求得透镜形状系数,由于Q1、Q2、Q3为规划条件下的结构参数,根据薄透镜规化曲率与形状因子的关系,f为透镜组的焦距,三个透镜的实际焦距为,三个透镜的折射率为ni,解得3个透镜的6个面半径值为ri(i=1,2,3,4,5,6),由(11)式可以推出三片式透镜初始结构

在得到初始结构后,应该对每一个透镜都设置合适的厚度,通过Zemax优化得到满足像质要求的结果如表2所示。
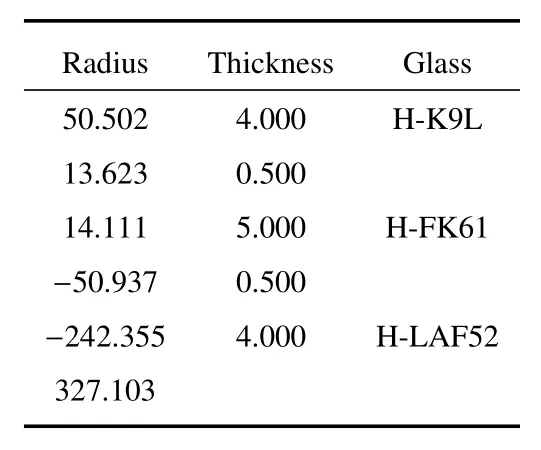
表2 分束系统光学结构参数Table 2 Optical structure parameters of beam splitting system
1.5 准直部分公差分析
对准直部分进行公差分析,元件表面公差参数如表3所示。

表3 公差参数Table 3 Tolerance parameters
在装调过程中,元件偏心小于±0.010 mm,倾斜小于±0.002°,中心间隔误差小于±0.005 mm,各项公差值在现有条件下均可检验。进行1000次蒙特卡洛分析,采用RMS波前差作为系统的评价函数,有90%>0.05326128,满足检测精度波前RMS≤λ/15(λ=632.8 nm)的检测指标要求。
2 系统设计结果分析
事实上光学系统采用不同折射率和色散系数的玻璃,希望使各个波长的光处于同一个焦平面,但只能较好地对三种波长消色差[11]。在Zemax软件上对准直系统的像质评价如图4,由图可见在全部工作波长和检测波长下,成像的点都在艾里斑以内。
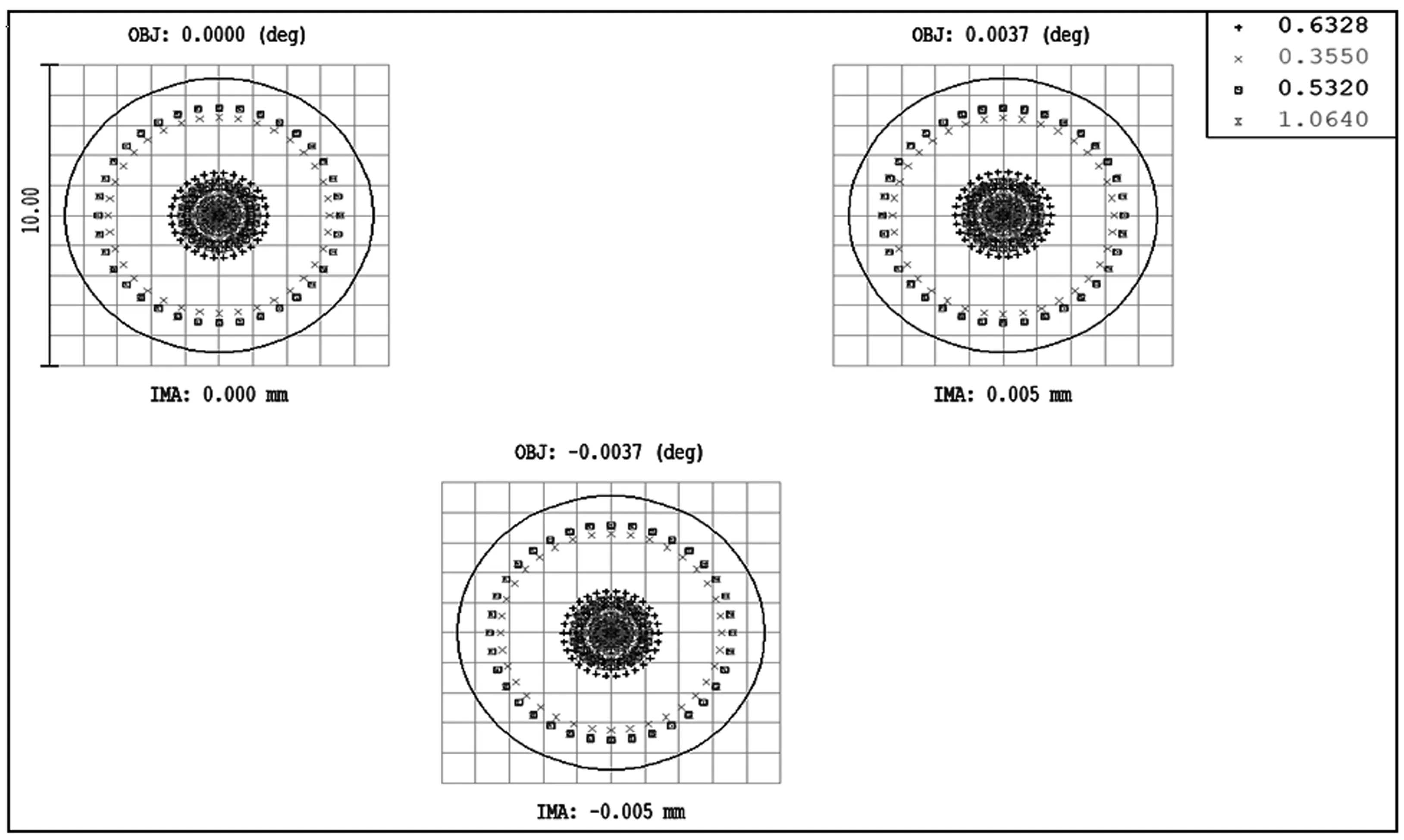
图4 准直系统艾里斑图Fig.4 Spot diagram of the collimation system
最终设计出的光学结构的波像差图如图5~7所示,显示光学系统在工作波长为355、532、1064 nm时中心视场和边缘视场的波前图,经计算RMS值<λ/15(λ=632.8 nm)。
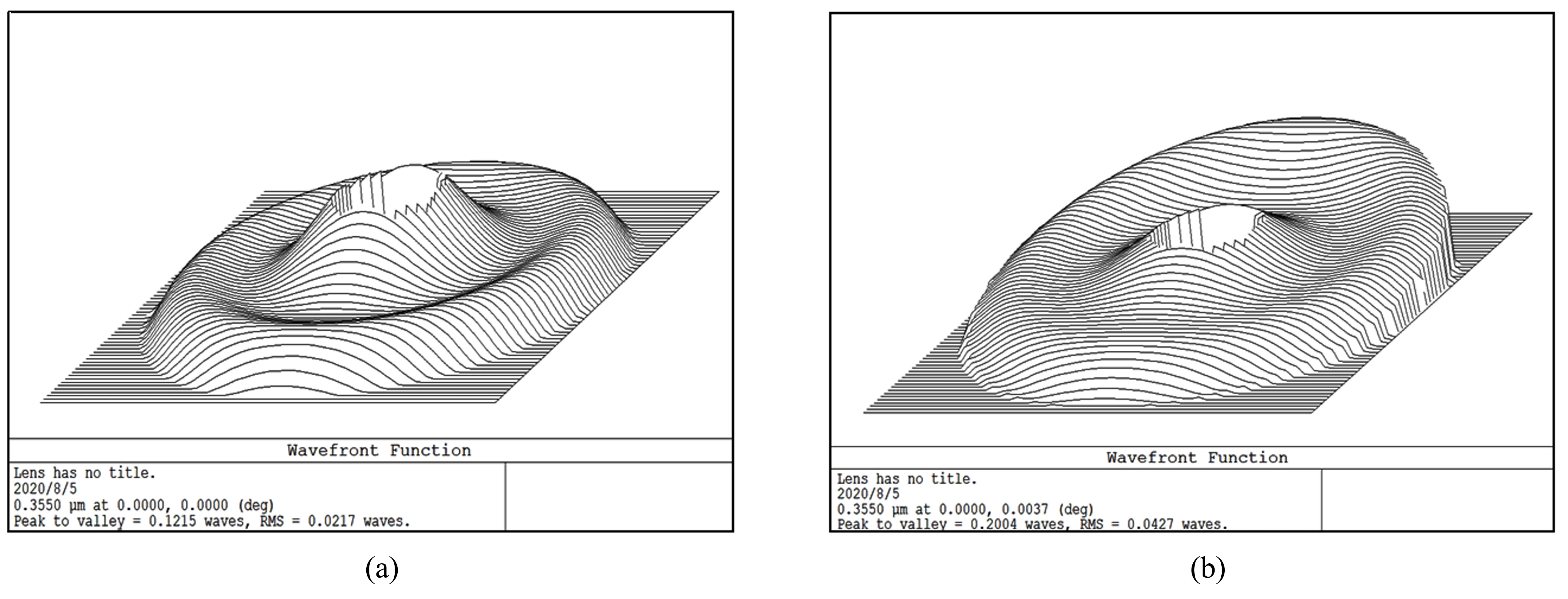
图5 在(a)0°及(b)0.0037°视场355 nm波前图Fig.5 355 nm wavefront map in(a)0°and(b)0.0037° field of view

图6 在(a)0°及(b)0.0037°视场532 nm波前图Fig.6 532 nm wavefront map in(a)0°and(b)0.0037° field of view

图7 在(a)0°及(b)0.0037°视场1064 nm波前图Fig.7 1064 nm wavefront map in(a)0° and(b)0.0037° field of view
3 结论
选择卡塞格林系统作为接收主系统。光纤分束系统的初始结构按聚焦系统计算,使用修正的相对部分色散P值和阿贝常数V值的P-V值来对玻璃材料进行选择,计算出三分离结构的初始结构参数,使用Zemax软件优化初始结构得出最终的光学系统,成功设计出一种多波长激光雷达光学系统,设计总体满足使用要求。