某虚拟主销悬架车型低速转向性能分析与优化
2021-12-11景立新冯博李飞吴利广
景立新,冯博,李飞,吴利广
某虚拟主销悬架车型低速转向性能分析与优化
景立新1,2,冯博1,李飞1,2,吴利广1,2
(1.中国汽车技术研究中心有限公司,天津 300300;2.中汽研汽车检验中心(天津)有限公司,天津 300300)
某改款车型设计开发过程中发现低速转向工况存在倒吸现象、低速极限转向位置无法回正等问题,通过理论分析转向力矩影响因素,利用动力学分析方法得出问题产生的主要原因为该虚拟主销悬架转向过程中ackerman误差大、主销后倾拖距变化率大及采用的轮胎侧偏刚度大。结合悬架及转向系统布置,提出了优化设计方案,通过仿真分析,验证了优化方案的可行性,为车辆设计、调校提供了理论依据。
低速转向;回正;ackerman
前言
车辆的转向特性包括高速转向特性及低速转向特性,其中低速转向特性包括转弯半径、低速转向力、低速回正等。
正常情况下,理想状态下车辆有较小的转弯半径,保证车辆具有较好机动能力;低速转向过程中方向盘力矩随方向盘转角的增大而增大,驾驶员有较好的转向反馈;低速转向时,方向盘释放后车辆能回到直线行驶能力,减轻驾驶员的驾驶负担[1-2]。
最小转弯半径主要取决于轴距、轮距及内外轮最大转角,其中内轮最大转角一般由底盘空间限制确定,而外轮最大转角由内轮最大转角及转向几何确定,平行转向对应的转弯半径最小,理想阿克曼(内外车轮指向同一圆心)时转弯半径较大[3]。
低速转向回正力矩主要来源于主销内倾角产生的抬升效应,利用重力回正使车轮回复到中间位置/直线行驶状态。主销内倾角越大,方向力矩越大,同时由于转向几何的非线性,在大转角时转向节力臂长度变小,对应的转向力矩会非线性增大。
某改款车型在设计开发过程中发现低速转向性能不理想,主要体现为低速转向时存在倒吸现象及低速极限转向位置无法回正。
1 问题描述
该车型为一改款车型,前悬架为双叉臂悬架,其中下叉臂由前后摆臂组成,每个摆臂与转向节以球铰连接(非真实主销结构,主销为虚拟轴线),由于布置原因转向器由前置调整为后置,改款车型悬架硬点不变,重新布置优化转向系统硬点,如图1所示。
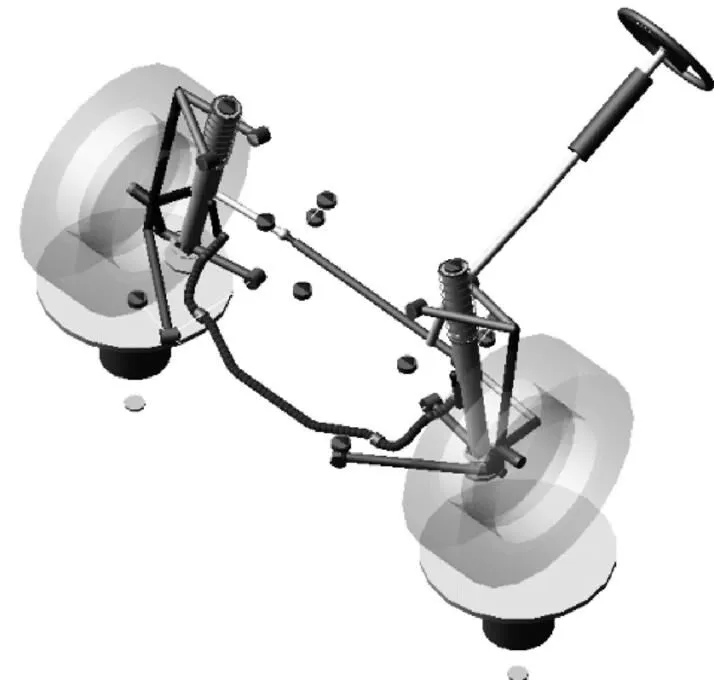
图1 双球铰双叉臂前悬架模型
进行低速转向工况分析,车速设置为10 km/h,关闭转向助力,方向盘从中间位置缓慢匀速转到左极限,之后反向转到右极限,再转到左极限,最终回到中间位置,仿真结果见图2所示。
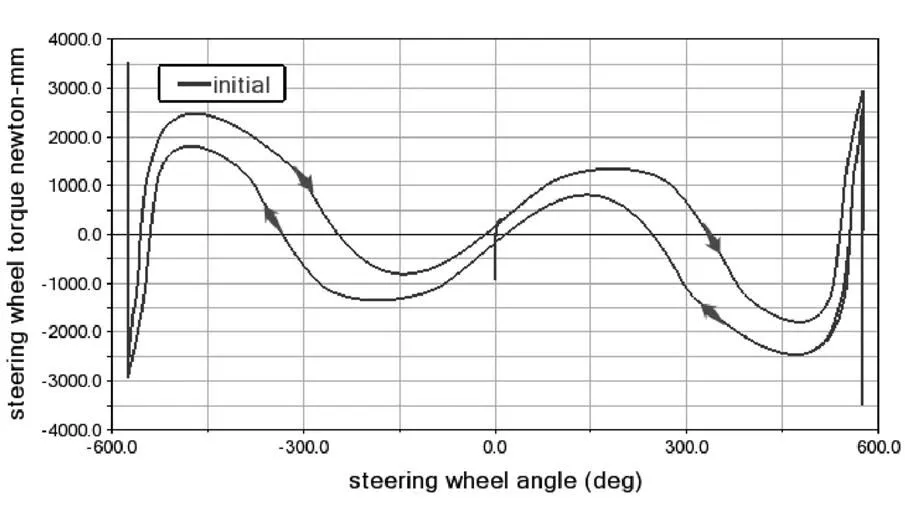
图2 低速转向工况方向盘力矩与转角关系
由仿真结果可以看出,方向盘转角较小时,方向盘力矩随转角逐渐增大;方向盘转角达到250 deg时,方向盘力矩开始减小,在大于350 deg时方向盘力矩与转角方向相反,出现倒吸现象。
进行低速回正工况分析,车速设置为10 km/h,关闭转向助力,方向盘从极限位置释放(方向盘力矩为0 Nm)。仿真结果显示,方向盘释放后车辆没有回到直线行驶状态,方向盘始终保持在极限位置。
2 原因分析
上述两个工况均具有低速、大转角特点,表现为车辆自身的回正力矩偏小甚至为负值。
车辆的回正力矩主要由三部分组成:
=T−T+T(1)
其中T为重力回正力矩,T为摩擦力矩,T为轮胎产生的回正力矩。
当T−T+T≤0时,车辆将无法回正或自转向。
车辆在低速大转角转向时,如内外轮转角偏离理想的ackerman转向,则意味着车轮平面与车轮轨迹不重合[4],轮胎有一定的侧偏角及侧向力[5],如图3所示。
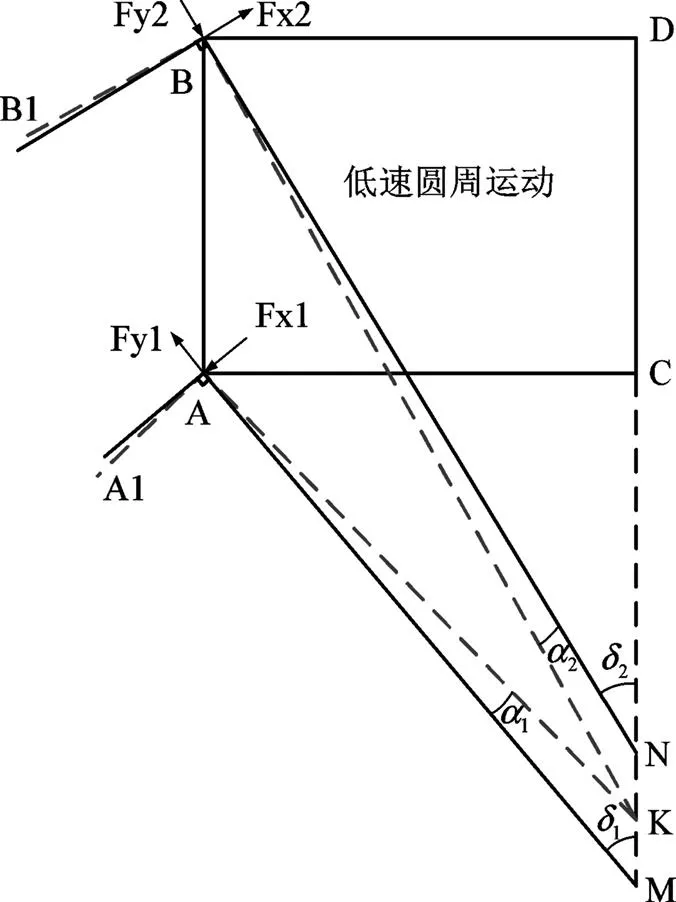
图3 汽车低速圆周运动轮胎力示意图
低速转向时,整车的侧向加速度较小,左右轮胎侧向力合力为零,即侧向力大小相等但方向相反,且均指向内侧[6]。
轮胎侧向力的大小取决于侧偏刚度与侧偏角,其中侧偏角的大小与实际外轮转角相对理想外轮转角差相关,实际外轮转角与理想外轮转角越接近(转向阿克曼越高),侧偏角越小,侧向力也就越小。
在转向过程中主销后倾拖距也不断变化,内侧车轮后倾拖距逐渐增大,与向内的侧向力一起产生一个使车轮向内转向的力矩;外侧车轮后倾拖距逐渐减小,与向内的侧向力一起产生一个使车轮向外转向的力矩(当后倾拖距为负时,产生使车轮向内转向力矩)。
由轮胎产生的回正力矩为:
T=|*|* (2−1) (2)
其中:为轮胎侧偏刚度;为侧轮胎侧偏角;1、2为内外侧主销后倾拖距。
而该车型存在以下明显特征:
2.1 主销后倾拖距变化大
相对于传统的双叉臂悬架,该车型下摆臂由前后两个摆臂组成,摆臂与转向节球铰连接,两个摆臂的轴线交点即为主销轴线下点(简称为主销下点),由于该交点并非真实硬点,故该悬架主销为虚拟轴线[7]。
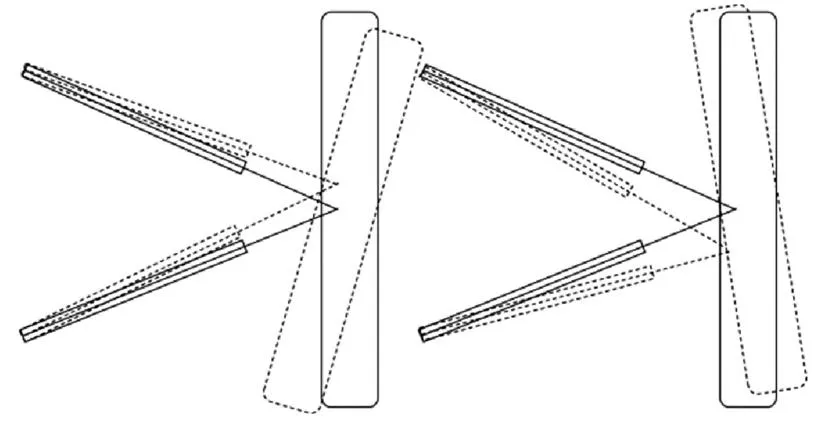
图4 前悬架前后下摆臂双球铰结构示意图
在转向过程中,两个摆臂轴线的交点纵向位置随转向角度变化,以右侧悬架为例,当右转时,轮胎接地点向后移动,而主销下点前移,对应的主销后倾角及后倾拖距将明显增大;而当左转时,轮胎接地点前移,主销下点后移,对应的主销后倾角及后倾拖距将明显减小;由于主销下点的移动,该类悬架转向时主销后倾拖距的变化显著大于麦弗逊及传统双叉臂式具有真实主销的悬架。

图5 主销后倾拖距对比
2.2 轮胎侧偏角大
低速转向时,内轮转角steerin对应的理想外轮转角steerout为:
steerout=atan(/(/tan(steerin)+)) (3)
其中为轴距,为轮距。
转向过程中,实际外轮转角与理想外轮转角并不一致,其差值将决定低速转向时的轮胎侧偏角的大小。
该车型在转向极限位置的实际外轮转角与理想外轮转角差为2.9 deg,较正常值偏大,考虑到使用的275/45R20型号轮胎,侧偏刚度大,因此需要减小该差值。
对于转向器后置悬架,内移转向拉杆外点能提高转向阿克曼,减小低速转向时的轮胎侧偏角。然而,转向系统优化时还要考虑另外一个重要参数toggle angle,其定义为在垂直于主销轴线的平面内,由转向拉杆内点投影1、外点投影2及主销与平面交点0形成的夹角,见图6,过大、过小的toggle angle将容易导致转向卡死现象。
以右转向过程为例,两个摆臂球铰位置前移拉动转向拉杆外点也随之前移,与主销下点前移及外移共同引起Toggle angle相对具有真实主销的悬架明显增大,如图7所示。
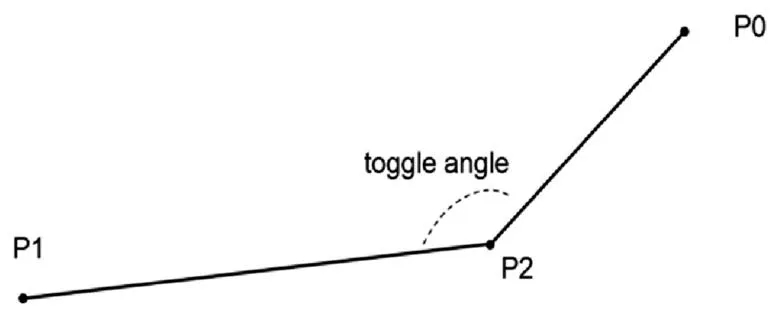
图6 toggle angle 示意图
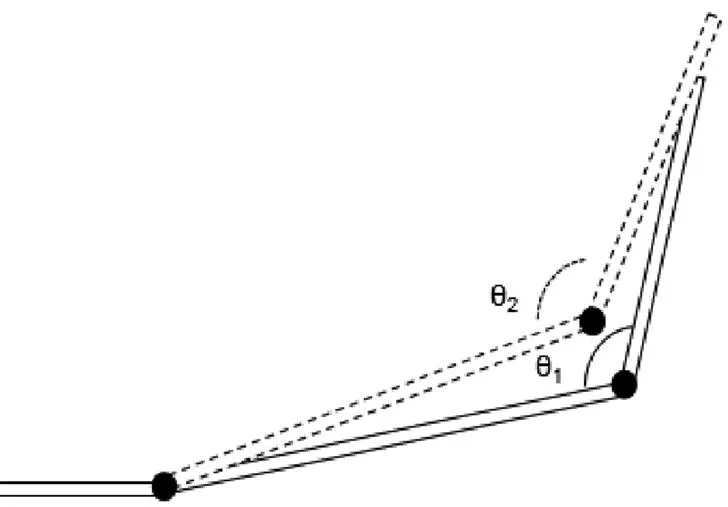
图7 双叉臂(下摆臂双球铰)悬架toggle angle
为了避免toggle angle过大,设计时需将转向拉杆外点外移,但这将导致转向阿克曼的降低,在优化时需要综合平衡。
3 优化方案
为解决该车型出现的低速转向倒吸及无法回正问题,可以通过增大主销内倾角、减小主销后倾拖距变化、减小轮胎侧偏刚度及减小轮胎侧偏角等方式实现。其中主销内倾角及主销后倾拖距变化主要由悬架系统决定,优化所需的周期及成较高;轮胎侧偏角由转向几何决定,可通过调整转向拉杆外点优化,同时也可通过调整初始前束角的方式来调整;减小轮胎侧偏刚度可采取更换小尺寸轮胎的方式实现。
3.1 调整转向拉杆外点
当转向拉杆外点内移时,转向阿克曼提升,但toggle angle角度增大,利用多体动力学仿真获得具体对应关系见表1。
表1 转向参数对比
参数外移5 mm外移2.5 mm初始位置内移2.5mm内移5mm @内轮20度阿克曼百分比23.5429.1734.8040.3745.94 内轮最大转角37.3037.3037.3037.3037.30 外轮最大转角32.4131.7731.1330.5529.97 理想外轮转角28.2428.2428.2428.2428.24 侧偏角2.091.771.451.160.87 极限toggleangle159.00160.31161.62162.495163.37
综合考虑toggle angle和阿克曼后采用转向拉杆外点内移2.5 mm方案。
3.2 调整初始前束角
原车采用的初始前束角为正值,如改为零或负值则在转向过程中相同内轮转角对应的实际外轮转角减小,更接近理想外轮转角,轮胎产生的侧偏角减小,降低轮胎产生的自转向力矩。
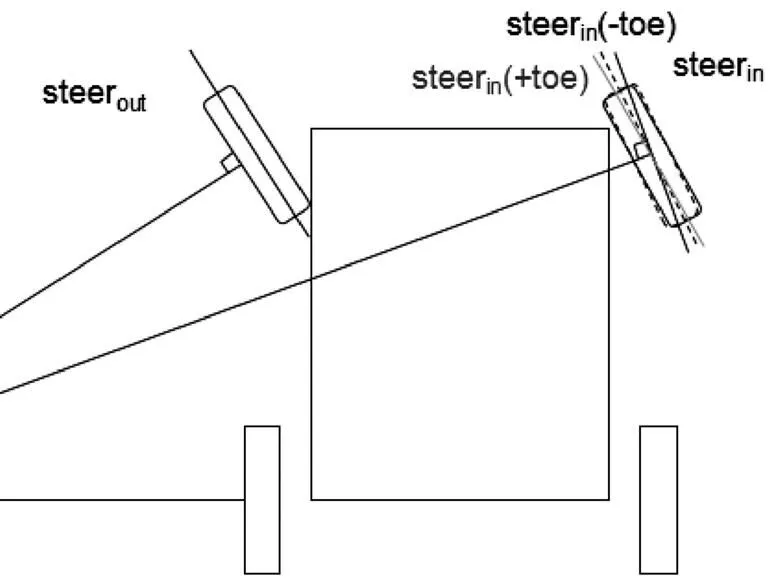
图8 初始前束角对实际外轮转角影响
一般正前束有利于提高车辆的稳定性,负前束有利于车辆的转向灵敏性,综合考虑后将总前束角由正0.1 deg调整为0前束。
3.3 降低轮胎侧偏刚度
轮胎侧偏角不是很大时,相同侧偏角对应的轮胎回正力矩与轮胎侧偏刚度成正比。轮胎侧偏刚度大往往有利提高车辆的操稳特性,但可能会导致低速转向时有较大的自转向力矩,降低车辆低速转向回正力矩及回正能力,因此针对该车问题,选用侧偏刚度稍小的轮胎可改善整车的低速转向性能。
将轮胎型号由275/45R20调整为255/50R20,轮胎半径增大3.75 mm,侧偏刚度下降20%左右。
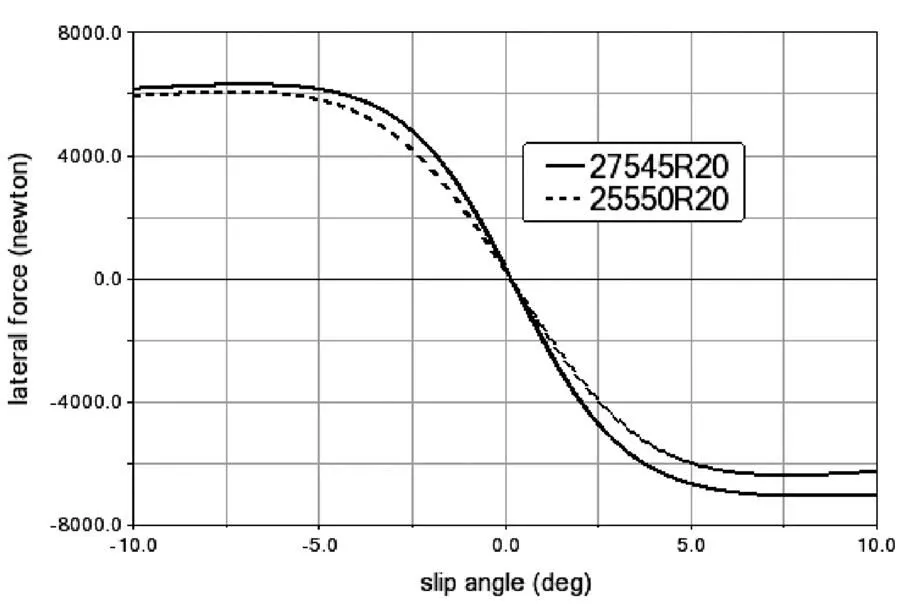
图9 两种轮胎型号侧偏特性对比
3.4 效果验证
针对以上优化方案进行整车仿真验证,试验工况包括低速转向工况及低速极限位置回正工况,仿真结果见图10及图11。
由仿真结果可以看出,单独减小前束角对中小角度转向时方向盘回正力矩改善明显,对大角度转向时方向盘回正力矩影响较小,减小前束角对低速极限位置回正改善不明显;单独内移转向拉杆外点可改善低速方向盘力矩,极限位置回正工况方向盘最终能回正,但回正时间较长;减小轮胎侧偏刚度对改善方向盘回正力矩影响稍大,极限位置回正工况回正时间减小;同时采用三种方案时方向盘回正力矩改善最显著,极限回正工况回正时间明显减小。
由于调整幅度受限,方向盘回正力矩暂无法达到随方向盘转角增大,且回程中也保持一定回正力矩的理想状态,考虑到EPS具备主动回正功能,因此可在后期实车匹配阶段进一步调整优化。
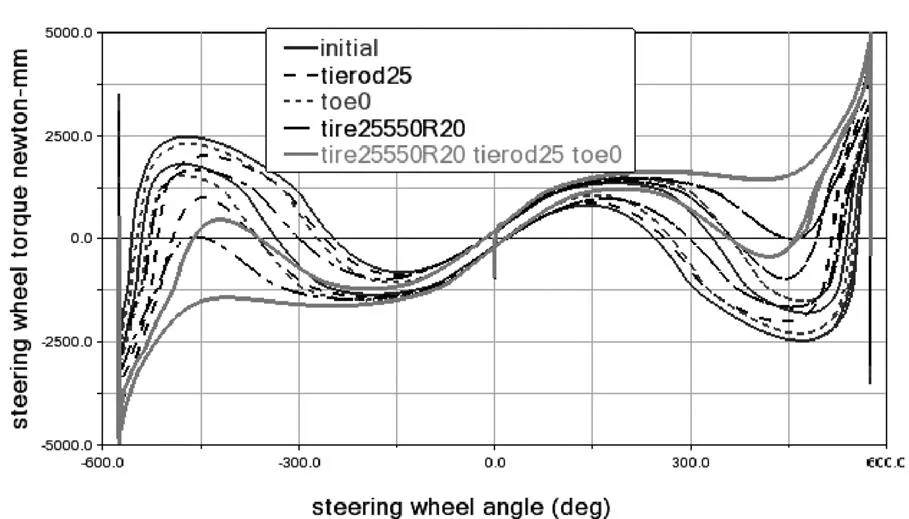
图10 低速转向工况不同优化方案对方向力矩影响
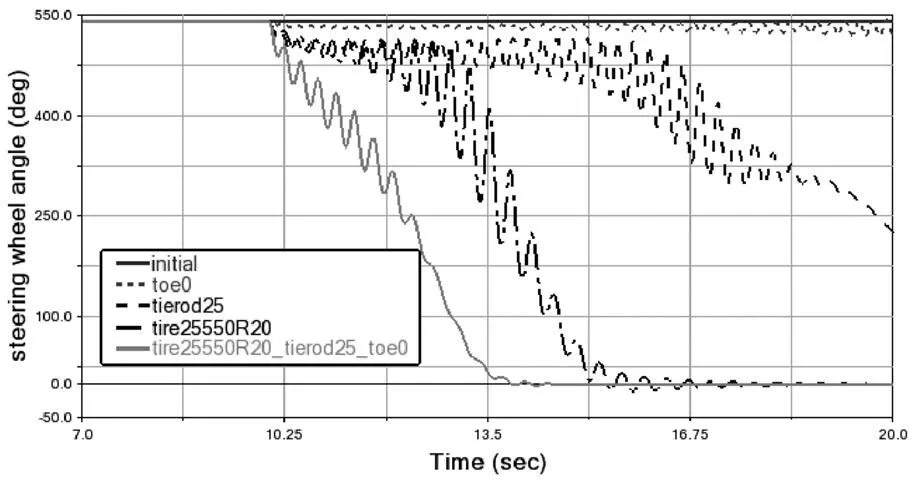
图11 低速回正工况不同优化方案对方向角度影响
4 结论
本文系统性的分析了影响车辆低速转向时方向盘回正力矩的影响因素,结合实际限制条件对轮胎侧偏刚度、转向阿克曼进行了优化,仿真结果验证了优化方案的可行性,为解决低速转向问题提供了理论依据。
[1] 郭孔辉.汽车操纵动力学[M].长春:吉林科学技术社,1991.
[2] 蔡章林.悬架系统K&C特性综述[J].上海汽车,2009(8):12-22.
[3] 赵六齐.车辆动力学基础[M].北京:清华大学出版社,2006.
[4] 刘惟信.汽车设计[M].北京:清华大学出版社,2001:609-610.
[5] 包志超.低速转向时转向梯形对回正力矩和路感效应的影响——关于阿克曼转向梯形与转向平形四边形的研究报告[J].世界汽车,1980(3):29-34.
[6] 景立新,吴利广,李飞,等.某车型转向回正性能问题改进[J].汽车科技,2014(3):30-33.
[7] 金凌鸽.C级车悬架KnC特性优化设计方法研究[D].长春:吉林大学,2010.
Analysis and Optimization of Low Speed Steering Performance of a Virtual Kingpin Suspension Vehicle
JING Lixin1,2, FENG Bo1, LI Fei1,2, WU Liguang1,2
(1.China Automobile Technology & Research Center Co., Ltd., Tianjin 300300;2.CATARC Automotive Test Center (Tianjin) Co., Ltd., Tianjin 300300)
In the process of design and development of a vehicle, it is found that there are some problems in the low-speed steering condition,such as self-turning phenomenon and can't return at low speed and ultimate turning position.Through the theoretical analysis of the influence factors of the steering torque, the main causes of the problem are the large ackerman error of the virtual kingpin suspension, the large change rate of mechanical trail and the large tire cornering stiffness.According to the layout of suspension and steering system, the optimization design scheme is put forward, and the feasibility of the optimization scheme is verified through simulation analysis, which provides a theoretical basis for vehicle design and tuning.
Low-speed steering; Return; Ackerman
A
1671-7988(2021)22-92-04
U463.33
A
1671-7988(2021)22-92-04
CLC NO.: U463.33
景立新,高级工程师,博士,就职于中国汽车技术研究中心有限公司,研究方向:底盘开发,主持多款车型底盘开发及性能调校。
10.16638/j.cnki.1671-7988.2021.022.024
