驾驶员选择性注意过程中的规则图式启动效应*
2021-12-10袁璐一常若松马锦飞
袁璐一 常若松 马锦飞
驾驶员选择性注意过程中的规则图式启动效应
袁璐一 常若松 马锦飞
(辽宁师范大学心理学院, 大连 116029)
本研究将驾驶无意视盲范式与交通违规事件识别任务相结合, 通过两个实验分别探究任务性质(有提示、无提示)和规则图式训练(训练、未训练)对驾驶员识别交通信号和违规事件的影响。结果发现, 交通规则提示能够提高有经验的驾驶员识别交通信号的正确率(实验1); 对于新手驾驶员, 则需要结合规则图式训练才能起到相同效果(实验2)。研究表明驾驶员选择性注意过程中存在规则图式启动效应, 图式训练能够弥补新手驾驶员经验的不足。
任务性质, 驾驶经验, 驾驶图式, 交通信息, 无意视盲
1 引言
目前, 驾驶员通常使用车载导航系统辅助驾驶, 导航给予驾驶员交通信息提示, 提高驾驶员的视觉搜索效率。但是, 驾驶员不仅要“看了”交通信息, 还必须“看到”交通信息。2020年1月至10月, 我国有人员伤亡的道路交通事故数据表明: 2.37%的伤亡事故是由于机动车违反交通信号导致的(公安部交通管理局)。众所周知, 识别交通信号是驾驶员安全驾驶的必要能力。可是, 驾驶员在实际观察道路情境时, 经常会忽视与驾驶任务相关的交通信号, 即使这些信号是清晰可见的(Charlton & Starkey, 2013; Harms & Brookhuis, 2016; Martens, 2011; Martens & Fox, 2007)。在现实生活中经常会有驾驶员没有看到标志牌而错过匝道口; 没看到单行道标志而逆行; 没看到“禁止调头”标志而违规调头等等。这类事件的共同特点就是驾驶员对相关交通信号“视而不见”。其心理学的概念表达就是无意视盲, 即当人们聚精会神于一个任务时, 却忽视了眼前显而易见的意外刺激或事件(Engström et al., 2017; Jacobsen et al., 2015; Mack & Rock, 1998)。无意视盲是选择性注意失败的一种表现(Kreitz et al., 2015), 是交通安全重大隐患(袁璐一等, 2019)。
有学者在内隐和外显注意捕获的基础上, 把较为重要的几个因素整合为注意计算框架来系统解释无意视盲, 认为在“自下而上”的注意捕获过程中, 个体依据感觉凸显性过滤感知信息; 与此同时, 任务性质(task-specific features)会经由“自上而下”加工机制, 激活期望, 形成注意定势。当过滤后的感知信息和注意定势不匹配时, 观察者就会出现无意视盲。同时认为, 任务性质是操控个体期望的参数, 在具体的实验过程中可通过指导语对被试期望加以控制(Gu et al., 2005)。例如, Shinoda等人(2001)让被试使用驾驶模拟器在虚拟城镇中行驶, 利用指导语对驾驶员分组, 要求一半驾驶员与前车保持恒定距离, 另一半驾驶员在保持跟车距离的同时, 还要遵守交通规则。在行驶中, 呈现的“通行”标志有时会转变成“停车”标志。结果发现, 当驾驶员的任务性质只是跟随前车时, 15%的驾驶员察觉了路中间标志的变化; 另一组则有33%的驾驶员察觉到这种变化。由此证明, 任务性质引导期望的形成, 极大的提高了驾驶员看到交通标志变化的几率。
然而, 任务本身的客观属性如何诱发驾驶员主观期望的产生?期望是个体根据自身知识背景和以往经验所产生的对未来情况的主观估计。驾驶员想要完成特定任务, 必须依赖以往知识或经验积累的驾驶图式产生特定期望, 以此适应环境变化, 控制行为(袁璐一等, 2019)。驾驶图式是指导驾驶员在给定环境中, 应该搜索哪里、期望什么、并以此做出行为决策的行动准则或模板。驾驶图式不是被教授的, 而是驾驶员在反复经历某种交通环境, 从足够的经验中建构的(Land & Furneaux, 1997)。也就是说, 同样的任务性质可能对不同的驾驶员激活不同的期望。McKnight和McKnight (2003)分析了1000起新手驾驶员引起的交通事故, 认为缺乏经验是其主要原因, 具体行为表现为驾驶员未能恰当的扫描前方、侧面和后方, 42.70%的交通事故都与视觉扫描有关。这说明, 新手驾驶员的事故发生未必是“粗心”, 更可能是因为“无知” (Agrawal et al., 2017; McKnight & McKnight, 2003)。关于驾驶员危险知觉的研究也表明, 与新手驾驶员相比, 有经验的驾驶员在各种与道路危险有关的识别任务中, 发现危险的准确率更高, 反应速度也更快, 他们猜测, 可能是驾驶图式在其中起到了指导作用(Chan et al., 2010)。综上所述, 驾驶员在执行具体任务时, 依赖自身的驾驶图式产生特定期望, 驾驶员图式的丰富程度是决定其驾驶效率的主要原因。由此假设, 任务性质与驾驶经验会对驾驶员无意视盲产生交互作用:如果任务是遵守交通规则, 有经验的驾驶员可能会结合路况关注交通信号, 新手驾驶员可能由于缺乏图式仅产生泛泛的期望, 难以“看到”交通标志, 即有经验的驾驶员“看到”交通标志的人数比新手多; 如果任务中不包含遵守交通规则提示, 新手与有经验的驾驶员的表现无异(假设1)。
驾驶员除了自主形成驾驶图式外, 培训是否有益于建构驾驶图式?研究表明, 驾驶培训对驾驶员的驾驶行为有显著影响(Pradhan et al., 2009)。受过RAPT (危险预测培训项目)训练的新手驾驶员比未受训练的驾驶员发生的撞车事故要少23.70% (Thomas et al., 2016); 经过V-RAPT训练(VR形式)的新手驾驶员可以侦测到86.25%的潜在危险, 是未经训练驾驶员侦测的2.78倍(Agrawal et al., 2017)。培训对有经验的驾驶员依然有效。双经验(驾驶摩托车和汽车)的驾驶员比单经验(仅驾驶汽车)的驾驶员更容易发现摩托车(Crundall et al., 2012), 但经过Pelmanism摩托车翻牌训练的单经验驾驶员会显著提高其侦测摩托车的能力(Crundall et al., 2017)。因此可以假设, 新手驾驶员经过驾驶图式训练后, 也能在包含交通规则提示的任务下提高识别交通信号的能力。(假设2)
驾驶图式既包含普遍的规则(如定期观察左右车镜, 水平扫描等), 也表征特定概念、事物或事件的认知结构, 反复经历某种驾驶情境, 可以形成不同的专业子图式(Crundall et al., 2008)。例如交通规则图式, 是指驾驶员对交通规则的理解和遵守, 是指导驾驶行为的准则或模板。如果驾驶员与某类交通事件互动频率较低, 没有形成完善的规则图式, 或者不能快速提取图式, 极易产生“视而不见”错误。
消极的态度或不恰当的信念也会阻碍驾驶员形成具体的驾驶子图式(Crundall et al., 2008)。例如, Mannering和Grodsky (1995)设计了一份问卷, 调查驾驶员对风险的态度、行为和评估。结果发现, 认知凸显性是影响汽车驾驶员“视而不见”摩托车的主要原因。认知凸显性是指目标被观察者主动锁定的能力(Cassarino & Setti, 2016), 具有高认知凸显性的目标往往是驾驶员经验库中存储的各类危险程度较高的客体(例如大货车、油罐车等), 这类车辆更容易捕获他们的注意。而汽车驾驶员普遍认为摩托车的威胁程度较低, 因此更容易将其忽视。据此认为, 如果驾驶员对某种交通事件的认知凸显性较低, 就难以提取驾驶图式, 引导他们“看到”这类交通事件。
Pammer等人(2015)提出不同的危险具有不同的认知凸显性, 比起道路旁站立的小孩, 驾驶员更容易对路边的成人视而不见。由此假设, 对于驾驶员来说, 不同交通规则的重要程度也是不同的。对于重要程度较低的交通规则, 驾驶员可能不易形成相关的规则子图式。譬如, 实线并道会对交通驾驶产生较大的威胁, 该交通违规行为的认知凸显性较高; “禁停处停车”现象对驾驶的威胁性较低, 该交通违规行为的认知凸显性也相对较低。比起“禁停处违停”, 驾驶员更容易发现“实线并道”; 启动规则图式训练对有效识别低认知凸显性违规事件的作用尤为明显。(假设3)
通过两个实验来验证这3个假设。实验1使用驾驶无意视盲任务, 考察不同的任务性质对驾驶员识别交通信号的影响。实验2对部分驾驶员进行规则图式的启动训练, 探究规则图式训练对驾驶员识别不同认知凸显性违规事件的影响。
2 实验1:任务性质对驾驶员识别交通信号的影响
2.1 方法
2.1.1 被试
参考以往关于交通视盲(Shinoda et al., 2001; Agrawal et al., 2017)的研究, 使用G-power 3.1, 较大效应量0.5, 功效值0.8, 计算最小样本量44人。从大连地区招募76名驾驶员, 年龄在19~40岁之间(M= 25.25岁,= 4.41岁), 其中男性驾驶员59名, 年龄在19~40岁之间(M= 25.64岁, SD = 4.89岁), 女性驾驶员17名, 年龄在21~26岁之间(M= 23.88岁,= 1.36岁)。所有被试的视力或矫正视力正常, 色觉正常, 实验结束后可以获得报酬。
2.1.2 实验仪器
实验采用Tobii X 120眼动仪记录被试的眼动轨迹, 采样率为120 Hz, 准确度为0.5°, 精确度为0.3°, 双眼追踪。实验所用显示器为27英寸, 分辨率为1920像素×1080像素。使用Tobii studio 2.2收集眼动数据。
2.1.3 材料
使用10个真实的城市驾驶场景视频片段作为实验材料, 每个视频片段的平均时间是20 s, 所有视频片段都是从驾驶员视角拍摄, 车辆驾驶速度在30~40 km/h之间, 拍摄当天天气晴朗(图1)。控制试次视频片段是没有交通违规的普通驾驶场景, 关键试次视频片段中有一白色车辆在“禁止调头”标志处违规调头。

图1 驾驶视频片段截图
2.1.4 实验设计
采用2 (驾驶员类型:有经验的驾驶员, 新手驾驶员) × 2 (任务性质:有交通规则提示, 无提示)两因素组间设计。有经验的驾驶员要求其驾驶总里程等于或大于3万公里, 新手驾驶员要求其驾驶总里程小于或等于1万公里(Fisher et al., 2006)。为了促使驾驶员更好地理解指导语(报告道路违规事件, 而非自己的违规行为), 增强任务卷入感, 遵守交通规则提示组要求被试对路况安全性进行评分之外, 并以交警的身份观察是否有交通违规事件; 无提示组只需对路况安全性进行评分。
因变量是关键试次中被试是否看到交通信号的正确率, 和对交通信号的搜索时间(Total Visit Duration)。搜索时间, 是指兴趣区呈现期间, 该兴趣区停留的所有注视点的持续时间之和。搜索是指从首个注视点出现在兴趣区中到下一个注视点移出兴趣区的时间片段, 如果在记录过程中, 被试回视该兴趣区, 兴趣区中的新注视点持续时间也会包含在该统计指标的计算中。如果被试到记录结束都没有看过兴趣区, 搜索时间记为0。
2.1.5 兴趣区划分
实验1关注的是驾驶员是否看到交通信号, 因此兴趣区覆盖了“禁止调头”标志, 大小是305像素×243像素(图2), 从驾驶员能看到“禁止调头”标志起至标志消失, 共4 s。

图2 “禁止调头”兴趣区
2.1.6 程序
实验程序参考Pammer和Blink (2013)的驾驶无意视盲任务。首先, 被试需要填写个人信息表, 包含姓名、年龄和驾驶里程等。随后向被试呈现指导语:
“欢迎您参加本次实验, 下面将会向您呈现一系列从驾驶员视角拍摄的真实交通情境视频。请您想象您就是那个正在开车的驾驶员。仔细观看视频, 在每个视频结束后, 请您对该视频的安全程度进行5点评分, “1”代表非常安全, “2”代表较为安全, “3”为既不安全, 也不危险, “4”代表较为危险, “5”代表极度危险, 并对自己的评分进行解释。”
被试距离电脑屏幕大约1米(与驾驶时驾驶员到挡风玻璃的平均距离一致), 并要求想象电脑屏幕是汽车挡风玻璃, 他们是正在驾驶的驾驶员。每段视频结束后, 被试需对所呈现路况做安全评分并解释理由。这是主要任务, 它符合驾驶员在典型驾驶场景下做出的是否安全的决定。这项任务并不是真的关注驾驶场景的安全程度或驾驶员的安全阈限, 而是为了让驾驶员的认知机制参与到这种决策中。该技术与标准的危险感知测试一致(Anstey et al., 2012)。
每个被试先观看三段练习视频, 然后眼动仪校准, 被试坐在眼动仪前方60 cm处。采用5点校准法对被试双眼校准, 确保所记录的眼球运动轨迹的准确。校准后实验开始。
正式实验分为两个程序。在“有提示组”的程序中, 每个视频之后, 被试需回答:“①请对当前路况安全评分并说明理由; ②当前路况是否有交通违规现象”; 在“无提示组”的程序中, 每个视频之后只有安全评分任务。实验共10个视频试次, 前9个是无交通违规驾驶场景的普通试次, 第10个是有明显违规驾驶场景的关键试次。关键试次呈现后, 询问被试是否看到道路交通标志牌, 并加以描述。实验结束后, 被试需要对10种交通违规事件排序并给出理由。根据驾驶图式理论, 认知凸显性越高的交通信息越容易被驾驶员自主提取为驾驶图式, 因此我们设计了排序任务, 目的是探究驾驶员认为的各类交通违规事件的认知凸显性程度是否与其识别该事件的概率有关, 以此作为后续实验(探讨认知凸显性对驾驶员无意视盲的影响)视频材料的选取依据。整个实验持续20分钟左右。
2.1.7 数据分析
采用SPSS Statistics 26.0对关键试次的识别结果卡方检验; 使用二元逻辑回归分析方法分析个人差异、安全倾向(即主任务评分)和搜索时间是否可以预测驾驶员识别交通信号的正确率; 使用曼−惠特尼检验分析有经验的驾驶员和新手驾驶员, 视盲驾驶员和非视盲驾驶员对“违规调头”事件的排序差异。
2.2 结果与分析
2.2.1 视盲结果
通过tobii studio分析驾驶员的视觉搜索区域, 可以发现“禁止调头”标志牌在驾驶员的主要视觉区域内(见图3、图4)。因此, 如果驾驶员报告没有看到“禁止调头”标志牌, 即意味着驾驶员出现了无意视盲。被试对关键试次中识别交通信号的搜索时间如图5所示, 无意视盲概率如图6所示。

图3 提示组的集簇图

图4 无提示组的集簇图
注: 集簇图是一种可在背景图上呈现注视点数据密度最大的区域的可视化图型。

图5 “禁止掉头”标志的搜索时间
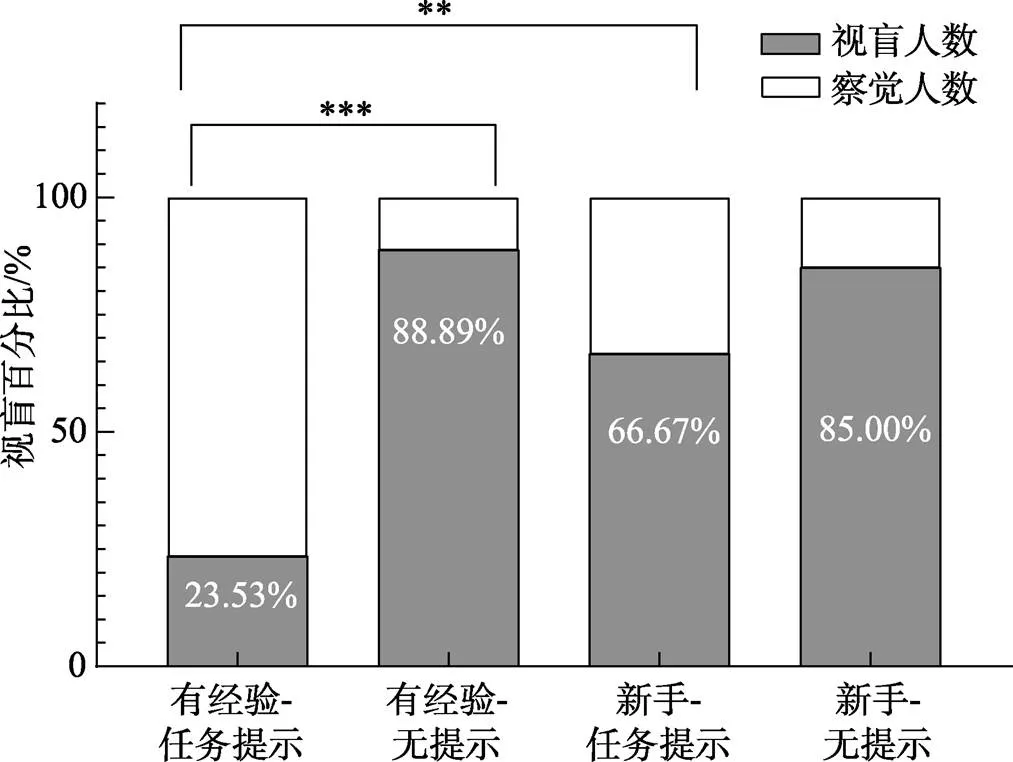
图6 关键试次无意视盲比率
注: ***< 0.001, **< 0.01
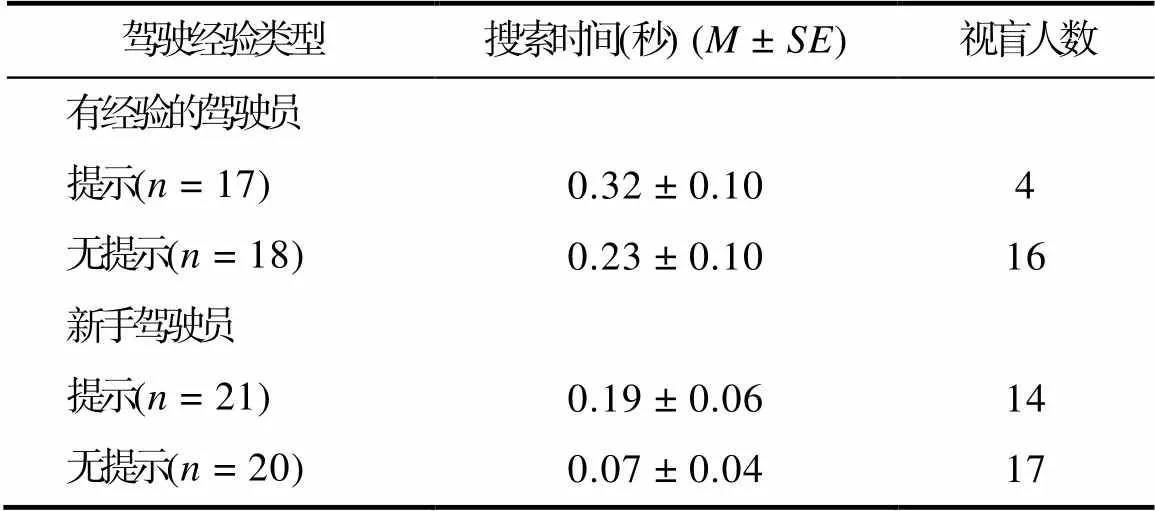
表1 实验1所有被试的搜索时间(秒)和视盲人数(人)
由表1可知, “提示组”和“无提示组”的卡方检验结果是(1,= 76) = 13.41,< 0.001, effect size = 0.15。“提示组”的视盲率显著低于“无提示组”; “经验组”和“新手组”卡方检验的结果是(1,= 76) = 2.92,= 0.088, “经验组”和“新手组”的视盲率无差异。
卡方检验4个组别的驾驶员的识别情况差异显著,(3,= 76) = 21.40,< 0.001, effect size = 0.53。进一步两两卡方检验的结果发现, 遵守交通规则提示组的有经验的驾驶员的视盲率要明显低于无提示组的有经验的驾驶员,(1,= 35) = 15.25,< 0.001, effect size = 0.66; 但是, 有提示的新手驾驶员和无提示的新手驾驶员的视盲率却没有差异,(1,= 41) = 1.87,= 0.399; 提示组有经验的驾驶员的视盲率明显低于提示组新手驾驶员,(1,= 38) = 7.94,< 0.01, effect size = 0.46; 无提示组有经验的驾驶员的视盲率和无提示组新手驾驶员没有差异,(1,= 38) = 0.13,= 0.723。
2.2.2 二元logistic回归分析
使用二元logistic回归确定驾驶员个人差异、对路况的安全评分等因素是否能预测对关键试次中交通标志的识别。
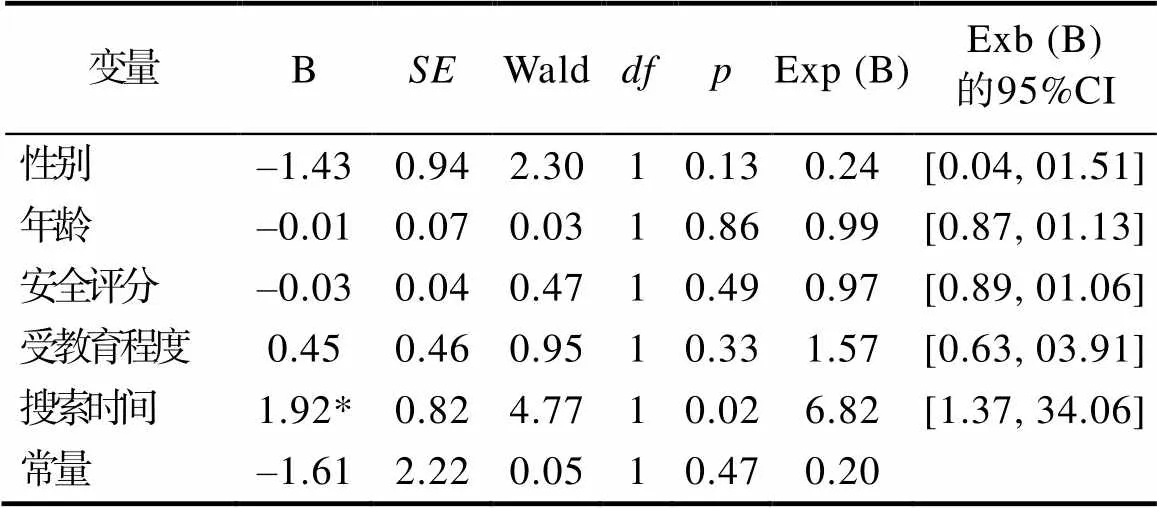
表2 个人差异及眼动搜索时间对视盲结果的逻辑回归分析
注:< 0.05。性别分类变量参考类别为第一个, “男”记为“0”, “女”记为“1”。
由表2可知, 搜索时间可以预测驾驶员是否会产生无意视盲, 即驾驶员对交通标志的搜索时间越长, “视而不见”交通标志的概率越低。其他变量的预测作用皆不显著。
2.2.3 交通违规行为排序分析
参加实验的驾驶员大多依据交通违规行为的严重程度排序, 或由重到轻, 或由轻到重。排序结果由重到轻转化后经曼−惠特尼检验发现, “视盲驾驶员”对“违规调头”排序的秩平均值(= 42.68)高于“察觉驾驶员” (= 29.98),= –2.40,< 0.05。这说明, 察觉到“禁止调头”标志的驾驶员普遍认为该行为的认知凸显性较高。有经验的驾驶员对“违规调头”排序的秩平均值(= 41.84)和新手驾驶员(= 35.65)无明显差异,= –1.30,= 0.194。
2.3 小结
通过眼动集簇图发现, 关键试次中的“禁止调头”标志牌在驾驶员的观察视野内, 多数有经验的驾驶员(57.14%)和新手驾驶员(75.61%)报告没有看到“禁止调头”标志, 且二者的无意视盲率无显著差异,说明无意视盲现象与驾驶经验没有直接关系。“交通规则提示组”和“无提示组”的无意视盲率差异显著, 说明任务性质提示可以有效提高驾驶员识别交通信号的效率, 具体原因将在总讨论中进一步分析。
实验还发现, 给予任务性质提示时, 有经验的驾驶员“视而不见”率下降到23.50%, 而新手驾驶员的“视而不见”概率仍高达66.70%, 表明任务性质的提示只对有经验的驾驶员减少无意视盲有作用。诚如相关研究所说, 相对新手驾驶员, 有经验的驾驶员似乎多了某种“技能”, 使任务性质提示起到作用(Hajiseyedjavadi et al., 2017)。据此我们认为, 由经验积累而来的驾驶图式正是这个关键变量。结合对交通违规行为排序的结果, 实验2中我们对一半驾驶员进行规则图式启动训练, 探究规则图式能否改善驾驶员识别不同认知凸显性交通信息的表现。
3 实验2:规则图式训练对驾驶员识别交通事件的影响
3.1 方法
3.1.1 被试
使用G-power 3.1, 中等效应量0.25, 功效值0.8, 计算最小样本量48人。从大连地区招募66名驾驶员, 年龄在19~38岁之间(M= 24.92岁,= 3.85岁), 其中男性驾驶员49名, 年龄在19~38岁之间(M= 25.28岁,= 4.35岁), 女性驾驶员17名, 年龄在21~26岁之间(M= 23.88岁,= 1.36岁)。所有被试的视力或矫正视力正常, 色觉正常, 实验结束后给予报酬。
3.1.2 实验材料
使用威尔科克森符号秩检验分析驾驶员对“禁停处违停”行为和“实线并道”行为的认知排序结果(由重到轻), 结果发现排序中“禁停处违停”的平均值(= 8.88)高于“实线并道” (= 6.98),= –6.00,< 0.001。这意味着, 驾驶员认为“禁停处违停”的认知凸显性低于“实线并道”, 事件类型的认知凸显性差异显著, 因此选择这两类事件作为实验材料。
选取30个真实的城市驾驶场景视频片段作为实验材料, 每个视频片段的平均时间是20 s, 所有视频片段都是从驾驶员视角拍摄, 车辆驾驶速度在30~40 km/h之间, 拍摄时天气晴朗。10个无交通违规的普通驾驶场景; 10个“在禁停标志处违停”的违规驾驶场景; 10个“实线并道”违规驾驶场景。30个场景随机呈现。
3.1.3 实验设计
采用2 (驾驶员类型:有经验的驾驶员, 新手驾驶员) × 2 (图式启动训练条件:训练, 未训练) × 2 (事件认知凸显性, 高:路口实线并道; 低:“禁止停车”处违停)三因素混合实验设计。其中驾驶员类型和图式启动训练条件是被试间变量, 事件类型是被试内变量。因变量是驾驶员准确识别两种事件的得分和对该事件的搜索时间(Total Visit Duration)。
3.1.4 规则图式训练
参考Crundall等人(2012, 2017)的知觉图式训练研究, 从互动频率和对事件的认知信念着手设计驾驶员规则图式启动训练。首先制作训练合集。通过剪辑将多种同类型的交通违规视频合成为一套视频教材(目的是增加驾驶员与此类行为的互动频率), 合集包含4种不同交通违规行为的视频片段和2个普通驾驶视频片段, 每个片段平均40 s, 4种不同的交通违规行为分别是车辆实线并道、禁停处违停、应急车道行驶、不礼让斑马线。训练组驾驶员观看教学视频, 对路况安全评分, 回答视频中是否有交通违规行为。每段视频之后, 主试给出正确答案, 朗读与该违规行为有关的法律条款(帮助驾驶员树立正确信念)并反馈。为了避免练习效应, 控制组也需对6段普通驾驶视频评分, 回答是否有交通违规行为, 但不给予反馈。
3.1.5 程序
驾驶员先填写个人信息表, 根据驾驶里程把他们随机分配到训练组和控制组接受规则图式训练。训练结束后进入正式实验, 对交通场景安全评分, 回答是否有交通违规现象。眼动校准过程同实验1。实验持续40分钟。
3.1.6 兴趣区划分
实验默认驾驶员只有看到交通信号才能判断是否有交通违规行为, 因此实验2的兴趣区覆盖了违规车辆和交通信号, 大小为318像素×252像素。“禁停处违停”的兴趣区(见图7)持续时间从驾驶员能看到该现象起至消失(= 10,= 4.19 s,= 1.80 s), “实线并道”的兴趣区(见图8)持续时间从车辆有跨实线并道趋势起至完全并道结束(= 10,= 4.12 s,= 1.40 s), 二者无差异,(18) = 0.12,= 0.91。

图7 禁停处停车兴趣区

图8 实线并道兴趣区
3.1.7 数据分析
采用SPSS Statistics 26.0对识别结果和搜索时间重复测量方差分析。使用Amos 18探究搜索时间在驾驶里程、图式启动训练和识别成绩之间的中介作用。
3.2 实验结果与分析
3.2.1 意外事件的识别正确得分
对识别得分重复测量方差分析, 结果如表3和图9所示。驾驶经验主效应显著,(1, 62) = 25.09,< 0.001, ŋ= 0.29, 有经验的驾驶员识别两种目标的正确率都显著高于新手驾驶员。规则图式训练主效应显著,(1, 62) = 59.51,< 0.001, ŋ= 0.49, 规则图式训练组驾驶员的识别成绩高于控制组。事件类型主效应显著,(1, 62) = 56.48,< 0.001, ŋ= 0.48, 驾驶员识别高认知凸显性的“实线违规并道”的成绩要高于低认知凸显性的“禁停处停车”的成绩。规则图式训练与事件类型交互效应显著,(1, 62) = 9.97,= 0.002, ŋ= 0.14。简单效应分析发现, 在识别“禁停”处停车时, 训练组的驾驶员的识别得分要远高于控制组的驾驶员,(1, 62) = 61.24,< 0.001, ŋ= 0.49; 在识别“实线处并道”时, 与控制组的驾驶员相比, 训练组的驾驶员识别得分也有所提高,(1, 62) = 9.14,= 0.004, ŋ= 0.13。这意味着, 在识别两种目标时, 规则图式训练都能使驾驶员提高识别率, 但是训练效果不同。规则图式训练对驾驶员识别“禁停”处停车的促进效果更加明显, 在识别“禁停”处停车时, 训练组比控制组的成绩要高4.25分, 但对于识别“实线处并道”, 仅仅高1.74分。
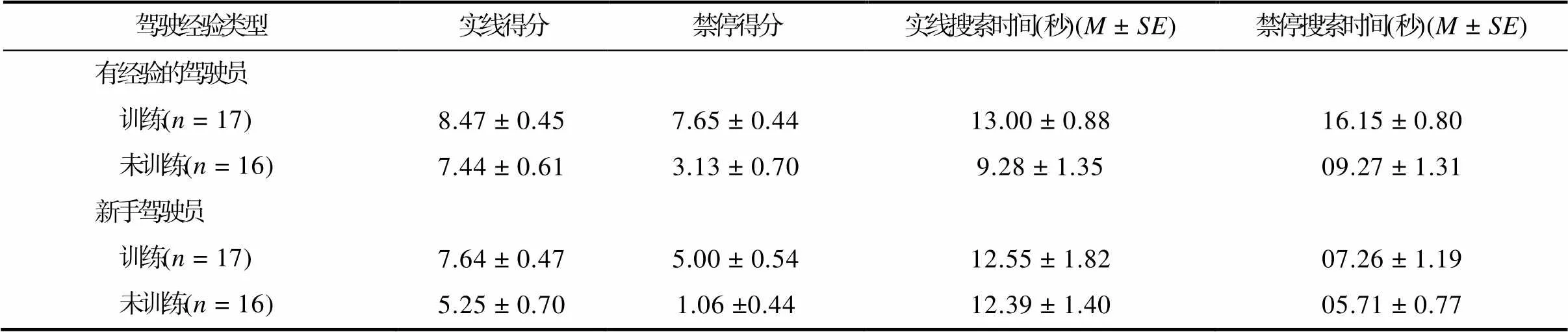
表3 识别事件得分(分)和搜索时间(秒)
注: 训练指驾驶员接受规则图式训练; 未训练指驾驶员未接受图式训练。

图9 驾驶员识别不同事件的正确得分
注:***< 0.001, **< 0.01
3.2.2 搜索时间的方差分析
选取与实验1相同的眼动指标:搜索时间(Total Visit Duration)。本实验的眼动数据源于同类视频的眼动数据相加之和, 单位秒。
根据表3, 对搜索时间重复测量方差分析:驾驶经验主效应显著,(1, 62) = 5.69,< 0.001, ŋ= 0.08, 有经验的驾驶员搜索两种事件的时间都显著长于新手驾驶员。规则图式训练主效应显著,(1, 62) = 9.00,= 0.02, ŋ= 0.13, 规则图式训练组的驾驶员对违规事件的搜索时间长于控制组。事件类型主效应显著,(1, 62) = 10.08,= 0.002, ŋ= 0.14, 驾驶员搜索高认知凸显性的“实线违规并道”的时间长于搜索低认知凸显性的“禁停处停车”的时间。图式启动训练与事件类型交互效应不显著,(1, 62) = 2.67,= 0.107。但是单因素方差分析发现, 图式启动训练组的驾驶员对“禁停处停车”的搜索时间显著长于控制组,(1, 62) = 16.19,< 0.001, ŋ= 0.21; 两组驾驶员搜索“实线并道”的时间无差异,(1, 62) = 1.92,= 0.172。
3.2.3 搜索时间的中介效应
方差分析结果发现, 驾驶经验及规则图式训练对“禁停处停车”的搜索时间和识别成绩存在显著影响, 因此后续只针对“禁停处违停”的识别成绩做中介效应检验。以驾驶经验和规则图式为自变量, 对“禁停处停车”的搜索时间为中介变量, 驾驶员识别“禁停处停车”的成绩为因变量建立中介模型(图10)。使用Bootstrap法验证中介作用的有效性, 保存运行2000次的每条路径的路径系数, 计算中介效应的平均路径系数, 结果如图10所示, 规则图式训练对禁停处违停识别率的预测作用显著(β= 0.52,< 0.001, 95% CI = [2.16, 4.69]);规则图式训练对禁停的搜索时间预测作用显著(β= 0.38,< 0.001, 95% CI = [2.04, 7.03]); 驾驶经验对禁停处违停识别率的预测作用不显著(β= 0.07,= 0.405, 95% CI = [–0.06, 0.14]);驾驶经验对禁停的搜索时间预测作用显著(β= 0.32,< 0.01, 95% CI = [0.15, 0.57]); 搜索时间对识别率的预测作用显著(β= 0.38,< 0.001, 95% CI = [0.08, 0.35]); 规则图式训练通过对禁停的搜索时间对禁停的识别率的间接效应大小为0.144, 95% CI = [0.26, 1.67]; 驾驶经验通过对禁停的搜索时间对禁停的识别率的间接效应大小为0.12, 95% CI = [0.02, 0.14]。综上, 对“禁停处违停”的搜索时间在总里程(即驾驶经验)与“禁停处违停”的识别成绩之间的关系中起完全中介作用; 在规则图式与“禁停处违停”的识别成绩之间的关系中起部分中介作用。

图10 中介效应模型
注:***< 0.001, **< 0.01
4 总讨论
本研究基于驾驶无意视盲范式结合交通违规事件识别任务, 通过两个实验分别探究任务性质(有交通规则提示、无提示)和规则图式训练(训练、未训练)对驾驶员识别不同认知凸显性交通违规事件的影响, 发现任务性质提示仅能提高有经验的驾驶员识别交通信号的正确率; 对于新手驾驶员, 任务性质提示需要结合规则图式训练才能起到相同效果。这说明, 规则图式训练可以弥补新手驾驶员经验的不足, 节省实践积累的时间成本。任务性质通过规则图式对识别道路信息产生影响。
4.1 任务性质和规则图式对驾驶员无意视盲的影响
实验1发现, 如果给予有经验的驾驶员任务性质提示, 可以提高他们识别交通信号的正确率; 但这种任务性质激活期望效应并没有出现在新手驾驶员身上。根据注意计算框架拓展模型图式激活期望假设, 这可能是因为任务性质提示需要以驾驶图式为中介激活期望(袁璐一等, 2019), 而新手驾驶员由于缺少规则图式, 所以任务性质无法激活期望。因此, 实验2对部分驾驶员进行规则图式训练。实验结果发现, 如果新手驾驶员启动了规则图式, 他们识别交通违规事件的绩效明显升高, 由此证明任务性质在激活期望过程中存在规则图式启动效应。
本研究与以往研究(Gu et al., 2005; Gershon et al., 2012)的结果不同, 他们发现, 任务性质直接激活个体期望, 提高目标搜索准确率。造成这一结果不同的原因可能是因为, 他们的实验并没有对被试的经验类型进行详细区分, 因此无法验证任务性质与驾驶经验的交互作用, 也就无法将驾驶图式在期望激活过程的重要作用分离出来。本研究依据驾驶里程对驾驶经验类型进行划分, 发现任务性质和驾驶经验有交互作用, 即使给予新手驾驶员任务性质提示, 也无法提高其识别交通信号的正确率, 在一定程度上支持了注意计算框架拓展模型的图式激活期望假设。该假设认为:任务性质是客观信息, 而期望是驾驶员根据客观信息结合自身已有的驾驶图式对未来的主观估计(袁璐一等, 2019)。如果缺少驾驶图式的参与, 即使有任务性质提示, 新手驾驶员也无法对路况产生合理的预期, 最终导致对道路关键信息“视而不见”。我们的研究进一步发现, 通过规则图式训练可以在短时间内向受训者提供接触某类交通事件的机会, 树立对交通规则的正确信念, 从而帮助其构建或提取规则图式, 使任务性质发挥更好的视觉引导作用, 改善驾驶员对道路关键信息的识别效率。
4.2 规则图式训练和事件类型对驾驶员识别效率的交互作用
实验2发现, 驾驶员识别“实线并道”的绩效高于识别“禁停处违停”, 即驾驶员更关注认知凸显性高的交通事件, 与以往的研究(Pammer et al., 2015)结论趋近。实验进一步发现, 规则图式训练对识别不同认知凸显性交通事件, 有着不同的促进效果。规则图式训练之后, 驾驶员对“禁停处停车”这个违规事件的识别有了明显的提高, 这和我们的假设一致。有趣的是, 无论是否参与图式训练, 有经验的驾驶员在识别“实线并道”时并无差异, 但是参加图式训练的有经验的驾驶员识别“禁停处违停”的绩效明显优于未参加训练的有经验的驾驶员。
驾驶员的态度、知识和驾驶策略会影响驾驶图式的形成(Crundall et al., 2008)。交通事件的认知凸显反映了驾驶员的态度, 驾驶员认为某种交通事件重要, 意味着此类交通信息具有高认知凸显性(de Craen et al., 2014), 也就更容易形成与此相关的驾驶子图式。驾驶过程中, 相较于车辆“实线并道”, “禁停处停车”的潜在威胁较小, 其认知凸显性较低, 驾驶员不易形成子图式, 即使在“是否发现有交通违规现象”这一提示下, 他们也容易忽视“禁停处违停”现象。因此, 当参与规则图式训练后, 驾驶员补充了该图式, 从而极大地提高了识别低认知凸显性交通事件的正确率。与此相对应, 车辆“实线并道”会引起较大的潜在危险, 其认知凸显性较高, 驾驶员容易形成“实线不能并道”图式。所以, 额外训练该规则图式对驾驶员识别这类交通违规行为的改善作用较小。
4.3 搜索时间的中介作用
实验2发现, 经验组和规则图式训练组被试都对违规事件的搜索时间更长, 且识别正确率更高。较早的研究发现, 在识别交叉路口出现的摩托车和汽车时, 汽车驾驶员对摩托车的总注视时间比汽车短。据此, Crundall等人(2012)认为, 这要么代表汽车驾驶员识别摩托车的效率更高, 要么代表他们识别不充分, 事故率结果支持第二种解释。而闫国利和白学军(2012)认为, 较长的注视说明观察者在详细地审视场景中的细节部分。本研究的行为结果支持了这个观点:驾驶员对目标搜索时间的长短, 表示他们对该目标的关注和精细加工程度。本研究的眼动指标和识别绩效的回归拟合也验证了这一点, 即搜索时间越长, 驾驶员越能准确侦测交通违规事件, 经验丰富或受过规则图式训练的驾驶员, 他们会用较长的时间搜索交通信号可能出现的位置。
驾驶经验对“禁停处违停”的识别绩效的影响, 以目标搜索时间为中介变量, 揭示了驾驶经验影响交通关键事件识别效率的视觉注意机制。驾驶经验是通过影响驾驶员对目标的搜索时间, 进而影响其对交通事件的识别表现, 这与以往的研究结论相合(Crundall et al., 2012)。也就是说, 有经验的驾驶员之所以比新手驾驶员能识别到更多的“禁停处违停”, 是因为他们知道看向哪里。从初学者, 到刚拿到驾照的新手, 再到更有经验的驾驶员, 驾驶员的眼动策略会在这个过程中不断改变(Mourant & Rockwell, 1972; Falkmer & Gregersen, 2005)。
对“禁停处违停”的搜索时间在规则图式与“禁停处违停”的识别绩效之间起到部分中介作用, 为规则图式的研究提供了实证支持。本研究发现, 训练规则图式可以直接提高驾驶员识别意外事件的绩效, 也可以通过指导搜索模式, 增加对相关区域的搜索时间来间接改善识别表现。部分中介意味着, 至少在某种程度上, 视觉搜索能力差是由于对特定驾驶情况不恰当的心理模型或图式造成的。
综上, 任务性质提示需要通过规则图式更好地发挥作用, 规则图式的针对性训练, 可以提高驾驶员识别关键道路交通信息的效率, 减少“视而不见”交通事件的概率。这就意味着, 想要避免交通事故, 除了增加驾驶里程之外, 图式理论教学也行之有效。
4.4 不足和展望
本研究采用计算机呈现交通视频而不是让驾驶员模拟驾驶, 这可能让驾驶员缺乏真实感, 其工作负荷也较低, 以至于很难再现驾驶员的真实表现。未来研究可以采用驾驶模拟器让驾驶员体验仿真的驾驶过程, 通过分析驾驶员的实际驾驶表现(例如, 是否真实的按照交通规则驾驶)来获取更有说服力的证据。本研究仅发现了图式训练的短期效果, 很难说明训练长期有效。将来可以设计追踪实验, 探讨图式训练的时效性, 寻找合适的图式训练频率, 优化训练效果, 以期形成一套系统的可应用的训练模式。
在实验1中, 有经验的驾驶员出现无意视盲的频率和新手驾驶员无异; 实验2中, 驾驶经验具有优势效应, 有经验的驾驶员能更好的识别交通违规事件。我们推论, 有经验的驾驶员容易受到注意定势的消极影响。所谓注意定势, 就是个体对目标刺激的相关特征所产生的期望或准备状态(张慧, 施建农, 2014)。实验1的意外事件的研究设定意在使驾驶员出现消极的注意定势, 从而“视而不见”违规现象。但是在实验2中, 每种类型的违规事件出现不止一次, 有经验的驾驶员不会产生“路况正常”的注意定势, 反而会产生“交通违规”的注意定势, 因此有经验的驾驶员识别两种道路违规现象都好于新手驾驶员, 体现了注意定势的双重影响效应。注意定势涉及到驾驶情境中的常见物体和操作习惯(Pammer & Blink, 2013), 这会帮助我们更有效的搜索目标刺激, 使驾驶员信息处理效率更高, 降低心理工作负荷(Gu, et al., 2005)。但是, 注意定势也可能会降低个体的情景意识, 尤其会导致有经验的驾驶员在面对意外刺激时出现“视而不见”, 进而造成交通事故(Briggs et al., 2017; Beanland, et al., 2017)。未来可进一步研究驾驶经验和注意定势的关系。
5 结论
综上所述, 本研究结果发现:(1)任务性质提示下, 当驾驶员具备规则图式时, 可以更好的识别道路交通信息, 支持了注意计算框架扩展模型, 说明驾驶员选择性注意过程中存在规则图式启动效应; (2)规则图式训练对驾驶员识别低认知凸显性道路信息更为有效; (3)驾驶经验和规则图式能够引导驾驶员对关键道路信息分配更多的视觉注意资源, 进而改善他们识别道路信息的表现。
Agrawal, R., Knodler, M., Fisher, D. L., & Samuel, S. (2017). Advanced virtual reality based training to improve young drivers’ latent hazard anticipation ability.,(1), 1995–1999.
Anstey, K. J., Horswill, M. S., Wood, J. M., & Hatherly, C. (2012). The role of cognitive and visual abilities as predictors in the multifactorial model of driving safety.,, 766–774.
Beanland, V., Filtness, A. J., & Jeans, R. (2017). Change detection in urban and rural driving scenes: Effects of target type and safety relevance on change blindness.,, 111–122.
Briggs, G. F., Hole, G. J., & Turner, J. A. J. (2017). The impact of attentional set and situation awareness on dual tasking driving performance.,, 36–47.
Cassarino, M., & Setti, A. (2016). Complexity as key to designing cognitive-friendly environments for older people.,(e114572), 1329.
Chan, E., Pradhan, A. K., Pollatsek, A., Knodler, M. A., & Fisher, D. L. (2010). Are driving simulators effective tools for evaluating novice drivers’ hazard anticipation, speed management, and attention maintenance skills.,(5), 343–353.
Charlton, S. G., & Starkey, N. J. (2013). Driving on familiar roads: Automaticity and inattention blindness.,(19), 121–133.
Crundall, D., Clarke, D. D., Ward, P., & Bartle, C. (2008).. Road Safety Research Report No. 85. Department for Transport, London.
Crundall, D., Crundall, E., Clarke, D., & Shahar, A. (2012). Why do car drivers fail to give way to motorcycles at t-junctions?,(1), 88–96.
Crundall, D., Howard, A., & Young, A. (2017). Perceptual training to increase drivers’ ability to spot motorcycles at T-junctions.,1–12. doi: 10.1016/j.trf.2017. 05.003
de Craen, S., Doumen, M. J. A., & van Norden, Y. (2014). A different perspective on conspicuity related motorcycle crashes.,, 133–137. doi: 10.1016/j.aap.2013.10.027
Engström, J., Markkula, G., Victor, T., & Merat, N. (2017). Effects of cognitive load on driving performance: The cognitive control hypothesis.,(5), 734– 764.
Falkmer, T., & Gregersen, N. P. (2005). A comparison of eye movement behavior of inexperienced and experienced drivers in real traffic environments.,(8), 732–739.
Fisher, D. L., Pollatsek, A. P., & Pradhan, A. (2006). Can novice drivers be trained to scan for information that will reduce their likelihood of a crash?,(suppl_1), i25–i29.
Gershon, P., Benasher, N., & Shinar, D. (2012). Attention and search conspicuity of motorcycles as a function of their visual context.,(1), 97–103.
Gu, E., Stocker, C., & Badler, N. I. (2005). Do you see what eyes see? implementing inattentional blindness.,, 178–190.
Hajiseyedjavadi, F., Zhang, T., Agrawal, R., Knodler, M., Fisher, D., & Samuel, S. (2017). Effectiveness of visual warnings on young drivers hazard anticipation and hazard mitigation abilities.,. 41–52.
Harms, I. M., & Brookhuis, K. A. (2016). Dynamic traffic management on a familiar road: Failing to detect changes in variable speed limits.,, 37–46.
Jacobsen, P. L., Ragland, D. R., & Komanoff, C. (2015). Safety in numbers for walkers and bicyclists: Exploring the mechanisms.,(4), 217.
Kreitz, C., Furley, P., Memmert, D., & Simons, D. J. (2015). The influence of attention set, working memory capacity, and expectations on inattentional blindness.,(4), 386–399.
Land, M. F., & Furneaux, S. (1997). The knowledge base of the oculomotor system.,(1358), 1231–1239.
Mack, A., & Rock, I. (1998). Inattentional blindness., 2(5), 3244.
Mannering, F. L., & Grodsky, L. L. (1995). Statistical analysis of motorcyclists' perceived accident risk.,(1), 21–31. doi: 10.1016/0001-4575(94)00041-J
Martens, M. H. (2011). Change detection in traffic: Where do we look and what do we perceive?,(3), 240–250.
Martens, M. H., & Fox, M. R. J. (2007). Do familiarity and expectations change perception? Drivers’ glances and response to changes.,(6), 476–492.
McKnight, A. J., & McKnight, A. S. (2003). Young novice drivers: Careless or clueless?,(6), 921–925. doi: 10.1016/s0001-4575(02)00100-8
Mourant, R., & Rockwell, T. H. (1972). Strategies of visual search by novice and experiences drivers.,(4), 325–335.
Pammer, K., Bairnsfather, J., Burns, J., & Hellsing, A. (2015). Not all hazards are created equal: The significance of hazards in inattentional blindness for static driving scenes.,(5), 782–788. doi: 10.1002/ acp.3153.
Pammer, K., & Blink, C. (2013). Attentional differences in driving judgments for country and city scenes: Semantic congruency in inattentional blindness.,, 955–963. doi: 10.1016/j.aap.2012.07.026
Pradhan, A. K., Pollatsek, A., Knodler, M., & Fisher, D. L. (2009). Can younger drivers be trained to scan for information that will reduce their risk in roadway traffic scenarios that are hard to identify as hazardous?,(6), 657–673. doi: 10.1080/00140130802550232
Shinoda, H., Hayhoe, M. M., & Shrivastava, A. (2001). What controls attention in natural environments?,(25-26), 3535–3545.
Thomas, F. D., Rilea, S. L., Blomberg, R. D., Peck. R. C., & Korbelak, K. T. (2016, January).(Report No. DOT HS 812 235). Washington, DC: National Highway.
Yan, G. L., & Bai, X. J. (Eds). (2012).. Beijing: Science Press.
[闫国利, 白学军. (编). (2012).. 北京:科学出版社.]
Yuan, L. Y., Chang, R. S., & Ma, J. F. (2019). Why does a driver can not see a critical event on the road? interaction between “bottom-up” and “top-down” processing mechanisms.,(3), 557–570.
[袁璐一, 常若松, 马锦飞. (2019). 驾驶员为何对道路关键事件"视而不见"?——"自下而上"和"自上而下"加工机制的交互作用.,(3), 557–570.]
Zhang, H., & Shi, J. N. (2014). The cognitive neural mechanism of inattentional blindness.,(12), 1867–1874.
[张慧, 施建农. (2014). 无意视盲的认知神经机制.,(12), 1867–1874.]
Regular schematic start training in the process of drivers’ selective attention
YUAN Luyi, CHANG Ruosong, MA Jinfei
(School of Psychology, Liaoning Normal University, Dalian 116029, China)
Drivers’ selective attention causes a significant hazard to traffic safety. Car drivers looking in the direction of other road users do not always perceive the presence of other parties. This is called a “looked-but-failed- to-see” (LBFTS) error. According to the research on attention, task-specific features can make observers form an attention set to guide attention. However, can drivers be prevented from making LBFTS errors by giving them task-specific features? We assumed that task-specific features are only useful for experienced drivers because they have driving schemata. When novice drivers are trained in driving schemata, they can improve their ability to identify traffic information with the help of task-specific features. In this study, we conducted two experiments. The Tobii T120 eye tracker was used to record participants’ eye movements. Experiment 1 used a driving inattentional blindness task to investigate task-specific features' working conditions, and the drivers' main task was to watch 10 traffic videos and score them. In Dalian, 76 drivers were recruited (mean age = 25.25 years, standard deviation () = 4.41 years). The study adopted a two-factor between-subjects design of 2 (experienced drivers, novice drivers) × 2 (task-specific features: yes, no). The dependent variables were a critical trial’s detection rate, and a total visit duration of traffic signal. Experienced drivers were required to drive a total of 30000 km or more, while novice drivers had to drive a total of 10, 000 km or less. A task-specific feature was observed of whether there were traffic violations. A traffic violation occurred during the critical trial, when the driver was asked whether they had seen a traffic signal after completing the main task. Experiment 2 investigated the effect of driving schema training. The drivers' main task was to watch 30 traffic videos and score them. Sixty-six drivers were recruited (mean age = 24.92 years,= 3.85 years). The study adopted a three-factor mixed experimental design of 2 (experienced drivers, novice drivers) × 2 (starting condition of schema training: started, not started) × 2 (event cognitive salience, high: intersection with solid parallel lines; low: unauthorized stop at “No Parking”). The driver type and the starting condition of schema training were inter-subject variables, and the event type was an intra-subject variable. The dependent variable was the driver's correct rate of identifying two kinds of events and the total visit duration of searching for this event. The results of Experiment 1 showed that the inattentional blindness rate of experienced drivers with task-specific features was significantly lower than that of experienced drivers without task-specific features; however, there was no difference in vision blindness between novice drivers with and without task-specific features. Moreover, the longer the total visit duration, the less likely the inattentional blindness of the drivers. The results of Experiment 2 showed that the recognition performance of the drivers in the schema start group was higher than that in the control group. Total visit duration plays an intermediary role among driving experience, driving schema, and recognition rate of low cognitive salience events. For drivers, only giving a task feature does not necessarily improve the visual search efficiency during driving, and driving schema plays an important role. Driving schema training can help a task feature make up for the gap brought by driving experience. Driving experience and schemata can improve drivers' performance in identifying traffic information with low cognitive salience by influencing their search time for traffic events.
task specific feature, driving experience, driving schemata, traffic information, inattentional blindness
B849
2020-02-23
教育部人文社会科学研究青年基金项目: “L3自动驾驶车辆驾驶员被动疲劳的心理机制及调控研究” (项目编号: 20YJC190015)。
马锦飞, E-mail: majinfei@lnnu.edu.cn