机器视觉在电力及水利设施监测中的应用
2021-12-08李岩李建李丹杨豪杰刘海峰苏国芳
李岩 李建 李丹 杨豪杰 刘海峰 苏国芳

【摘 要】针对电力及水利行业人工巡检效率低、实时性差的问题,基于机器视觉模型,论文设计了针对电力设备及水利设施自动检测系统。系统使用YOLO V5模型,通过数据增强、数据训练,得到一种运算量较小、准确率较高的检测模型。
【Abstract】Aiming at the problem of low efficiency and poor real-time performance of manual inspection in the power and water conservancy industry, based on the machine vision model, an automatic detection system for power equipment and water conservancy facilities is designed in this paper. The system uses the YOLO V5 model, through data enhancement and data training, a detection model with less computation and higher accuracy is obtained.
【关键词】机器视觉;YOLO V5;电力;水利
【Keywords】machine vision; YOLO V5; power; water conservancy
【中图分类号】TP18 【文献标志码】A 【文章编号】1673-1069(2021)12-0194-03
1 引言
随着城市化进程的加快,人民生活水平的提高,电力及水利行业在社会生活中的重要性不断增加。确保电力及水利设施的安全,保障社会需要,具有重要的现实意义。传统的检测系统普遍使用人工巡检的方式进行工作。当需要确定设备安全时,需要专业的巡查人员定期巡查,而人工监测的工作方式效率低、占用资源、实时性差且容易出现漏检,对设备的安全运行带来隐患。因此,使用机器视觉技术,利用捕捉的图像对电力及水利设施进行自动监测成为一种有效的解决方式。自动检测高效、实时、成本低且安全可靠。本文以采集到的电力设备及水利设施混凝土图像为训练样本,基于机器视觉方法,对电力设备运行情况及水利设施混凝土裂缝情况进行自动监测,人员只需对检查结果进行核查,高效、实时、成本低且安全可靠,具有一定的实用意义。
邹雷(2014)使用BP神经网络对水下混凝土裂缝进行识别;李若星(2018)使用Gabor滤波器来进行滤波处理并提取特征并使用自适应遗传算法对混凝土的方法对混凝土裂缝进行检测;窦一民(2020)使用特征增强算法Feature GANs及目标检测算法SSD对输电线异物进行检测;王斯凡(2018)使用支持向量机对门隔离开关状态进行自动判断并使用深度学习模型VGGNet对电力系统中变压器红外成像中故障点进行判断。但是,电力设备及水利设施的自动化检测中,由于图像运算计算量较大,识别的实时性及准确度都需要进一步提高。因此,在保证目标检测准确性的同时,提高目标识别的实时性是电力和水利行业自动检测系统的发展方向。
2 总体设计
基于机器视觉的自动监测系统,主要由图像采集、图像处理及图像输出部分组成(见图1)。图像采集部分会自动获取监测目标图像,如电力设备的运行中的图像、水利设施混凝土表面图像等。图像传入系统图像处理部分进行处理,图像处理部分一般由满足算法计算力要求的处理器构成。经图像处理计算,需要监测目标的位置及类型会在图像进行标注,经输出部分进行输出。专业巡查人员只需对疑似故障地点进行检查并处理,提高了监测实时性,同时降低了漏检的概率,具有一定的实际意义。
3 相关技术
3.1 机器视觉算法
随着机器视觉领域近几年的飞速发展,基于机器视觉技术的目标检测速度越来越快,准确度不断提高。目前有不少较为成熟的目标检测模型,如Fast CNN、SSD、RetinaNet、YOLO系列算法等。目标检测算法可以分为one-stage和two-stage两种类型,two-stage指的是检测算法需要分两步完成,首先需要获取候选区域,然后进行分类,如R-CNN系列;与之相对的是one-stage检测,可以理解为一步到位,不需要单独寻找候选区域,典型的有SSD/YOLO。one-stage检测算法具有速度快、计算量小等优点,目前应用越来越广泛。
本文的目标检测采用了YOLO算法,YOLO算法具有运算速度快、计算量小、识别准确率高等优点,是近年来发展较快的优秀算法之一。YOLO算法发布以来,到目前共有V1到V5等多个模型。YOLO V5模型共有4个版本,可以适应多种计算速度和精度要求。本设计采用了YOLO V5计算模型进行目标检测。
3.2 YOLO目标检测模型
YOLO V5目标检测模型基于pytorch深度学习模型,较之前的检测模型,是一种易于部署在嵌入式系统中的轻量化目标检测模型,具有速度快、计算量小、精度较高等特点。YOLO V5主要由backbone、neck、head三部分組成。
模型backbone由CSPNet(跨阶局域网络)实现,CSPNet可以有效缓解梯度消失问题,支持特征传播,减少网络参数数量。Backbone中主要由focus层,卷积层、bottleneckCSP层及SPP层组成,如图2所示。在模型backbone图中输入数据为640*640*3,经过运算,网络输出数据尺寸为20*20*1024。
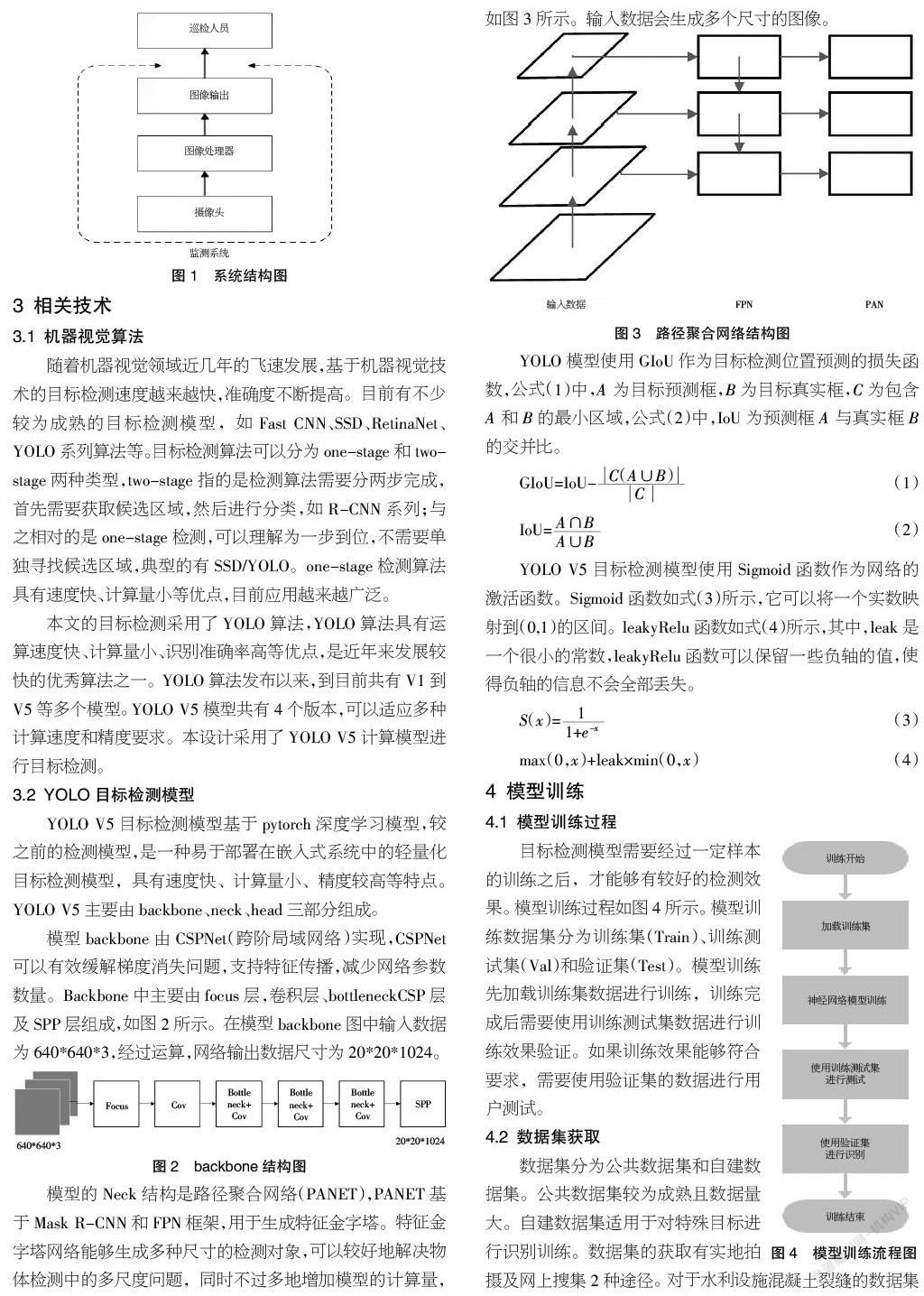
模型的Neck结构是路径聚合网络(PANET),PANET基于Mask R-CNN和FPN框架,用于生成特征金字塔。特征金字塔网络能够生成多种尺寸的检测对象,可以较好地解决物体检测中的多尺度问题,同时不过多地增加模型的计算量,如图3所示。输入数据会生成多个尺寸的图像。
YOLO模型使用GIoU作为目标检测位置预测的损失函数,公式(1)中,A为目标预测框,B为目标真实框,C为包含A和B的最小区域,公式(2)中,IoU为预测框A与真实框B的交并比。
4 模型训练
4.1 模型训练过程
目标检测模型需要经过一定样本的训练之后,才能够有较好的检测效果。模型训练过程如图4所示。模型训练数据集分为训练集(Train)、训练测试集(Val)和验证集(Test)。模型训练先加载训练集数据进行训练,训练完成后需要使用训练测试集数据进行训练效果验证。如果训练效果能够符合要求,需要使用验证集的数据进行用户测试。
4.2 数据集获取
数据集分为公共数据集和自建数据集。公共数据集较为成熟且数据量大。自建数据集适用于对特殊目标进行识别训练。数据集的获取有实地拍摄及网上搜集2种途径。对于水利设施混凝土裂缝的数据集采用实地拍摄的方式获取(见图5),对于电力设备故障数据集采用实地拍摄和网上搜集相结合的方式获取。
4.3 数据集标注
对模型进行训练的数据集,需要对数据集进行标注之后进行训练。LabelImg是对目标识别数据进行标注的工具软件,通过labelimg,可以对获取到的图像数据进行目标标注。标注样本如图6所示。
为进一步提高训练的准确率,对样本使用数据增强技术,通过对样本进行部分遮挡、反转等进一步扩充数据集,以达到更好的训练效果(见图7)。
5 结果及分析
5.1 平台及训练过程
本次实验选用矩池云及Colab云平台进行训练,使用平台环境为:Xeon E5-2678处理器,64G内存,NVIDIA GeForce GTX 2080Ti 16G独立显卡。Linux操作系统,python3.7,pytorch1.9开发环境。
本次训练使用YOLO V5预训练目标检测模型作为知识源,240张数据图片作为训练集,50张图片作为测试集,输入图像尺寸为640×640,批处理大小设置为16,迭代次数设置为1500,初始学习率设为0.01,权重衰减率设为0.0005,IoU阈值设为0.5。
5.2 结果评价
精确率(precision)、召回率(recall)是目标检测模型的通用评价指标。TP为模型预测为正且预测正确的目标,FP为模型预测为负且预测错误的目标,FN为预测为负且预测错误的目标。精确率计算公式如式(5)所示。召回率计算公式如式(6)所示。
6 结论
针对电力设备及水利设施人工检测困难、效率低、危险系数高的问题,本文设计了针对电力设备及水利设施自动检测系统。系统通过数据训练数据采集、增强,使用YOLO V5机器视觉模型训练,得到一种运算量较小、准确率较高的检测模型。经过实际测试,本系统具有成本低、实时性强、性能稳定等优点,具有一定的使用价值。
【参考文献】
【1】邹雷.基于机器视觉的混凝土結构水下表面裂缝检测技术的研究[D].宜昌:三峡大学,2014.
【2】李若星.基于机器视觉的混凝土裂缝检测方法的研究[D].重庆:重庆大学,2018.
【3】窦一民.机器学习在输电系统监控图像中的应用研究[D].济南:济南大学,2020.
【4】王斯凡.基于机器视觉的电力设备识别与故障诊断技术研究[D].北京:华北电力大学,2018.
【5】蒋文萍,蒋珍存.基于多重迁移学习的Yolo V5初期火灾探测研究[J].消防科学与技术,2021(1):109-112.
【6】王坤,房玉吉,刘华龙,等.基于YOLO-v5和ResNet的舱底水液位识别算法[J].船海工程,2020,49(06):39-43.
