旋翼飘带稳定式子弹降落弹道特性
2021-12-03宋晨,李磊
宋 晨,李 磊
(军事科学院防化研究院, 北京 102200)
1 引言
子母弹是一种对付地面多目标的武器,当母弹飞行到目标区域上空的一定高度,从母弹中抛撒出来,形成的子弹群降落飞行,实现对地面目标的攻击[1]。由于子弹群是在母弹高速飞行过程中,通过一定的动力(如火药推动、中心爆炸等)被快速抛撒出来的,使得子弹降落飞行的初始扰动(初始攻角、初速等)比较大,即使抛撒过程采取一定的时序控制和姿态控制,也不可避免地使各个子弹的初始扰动存在随机性。现有的子弹其稳定飞行方式各不相同,有固定尾翼式,也有靠旋翼形成的自旋稳定式,还有飘带式尾翼稳定式、降落伞稳定式,以及各种混合的稳定方式,还可以提供姿态控制的稳定式等。子弹群在目标区域落点形成的散布,取决于子弹群的抛撒方案、初始扰动控制和姿态飞行稳定性控制。显然,在一定的子弹群抛撒方案和初始扰动前提下,子弹飞行稳定的理想方式是通过姿态控制实现。但是对控制方案的设计,则依赖于对子弹本身无控制条件下姿态不稳定性机理。明确了子弹飞行姿态不稳定的机理,姿态控制方案的设计就有了合理的依据,也为本身无控制的子弹弹道设计奠定了基础。目前,根据工程经验,发现一种旋翼飘带稳定式子弹的降落弹道非常不稳定,落点散布不均匀。通过研究模型弹丸降落飞行特性,分析其可能的飞行不稳定机制,对实现子弹的姿态控制和稳定飞行、最终形成均匀的落点散布具有十分重要的指导意义。本研究依据某子弹的空气动力学数据,建立其六自由度弹道方程,进行弹道仿真来开展旋翼飘带稳定式子弹降落弹道特性研究。图1为旋翼飘带子弹结构图。

图1 旋翼飘带子弹结构示意图
国内外关于子母弹子弹的研究大多集中在子弹的开仓和抛撒过程中。文献[2-12]中对子母弹分离抛撒过程中子弹的运动规律进行了仿真分析计算。而对于子弹在空气中的飞行,孙宜亮等对某旋翼飘带稳定式子弹的外弹道和飞行稳定性进行了分析[13]。但是由于缺少子弹的具体气动参数,只能通过固定参数来对方程进行简化,计算出的弹道数据只能作为运动趋势的判断依据,无法得出比较准确的子弹运动规律。会对弹药整体作战效能的分析和评估产生一定影响。
因此本文运用风洞实验测得的某子弹的空气动力参数,建立子弹的六自由度计算仿真模型,提供仿真计算得出了子弹的外弹道特性的结果,对结果进行分析,研究可能导致子弹飞行不稳定的因素。
2 子弹气动特性测试
风洞实验的主要目的是获得该子弹的空气动力参数,验证气动计算数据的准确性,为姿控系统设计提供低速全状态六自由度气动数据。
实验测得了出马赫数0.4~1.5,攻角-2°~45°时飘带子弹的气动力系数。试验马赫数Ma=0.4、0.5、0.6、0.7、1.0、1.5,攻角α=-2、0、2、4、7、10、15、20、25、30、35、40、45°,风洞试验的单位长度雷诺数范围Re=9.13×106~19.80×106(1/m)。分别为法向力系数,轴向力系数,升力系数,阻力系数,滚转力矩系数,俯仰力矩系数,子弹压心相对于质心的位置。弹体为圆柱体,长约100 mm,底面直径约 40 mm。通过实验数据可以得出一定结论:
1) 在较小的风速条件下(50~90 m/s)法向力系数Cn和俯仰力矩系数绝对值|Mzt|随攻角增加呈非线性增大;
2) 轴向力系数Ca在攻角0°之后先随攻角增加而增大,到攻角15°~25°之后又呈相反规律;
3) 风速由大到小变化时的轴向力系数变大、压心不断靠后。在较大的风速条件下,(M>0.4)随着攻角正向增大,法向力系数Cn呈近似线性增加,俯仰力矩系数mzg2整体呈负向增加;
4) 质心g2的系数为0.467(0.07/0.15),数据显示马赫数0.4~1.0的范围内压心均大于0.467,是静稳定的。
通过多次重复的实验数据表明,实验结果符合规律、数据合理,可以作为该弹载荷计算及姿态控制分析。
图2~图5分别给出了子弹在不同攻角下,阻力系数;升力系数;俯仰力矩系数;滚转力矩系数随马赫数的变化,图5为低速条件下,不同攻角子弹的滚转力矩系数随风速的变化。

图2 阻力系数随马赫数变化曲线

图3 升力系数随马赫数变化曲线
由图2可知,阻力系数随马赫数变化呈一定的波动趋势,当攻角为0°和10°时CX大小变化较小,当攻角为20°和40°时子弹的阻力系数在接近0.6马赫数时会有一个向下的波动,然后在0.8马赫数时又有一个向上的波动。
图3中不同攻角下升力系数随马赫数变化呈现相似的波动趋势。当攻角为0°时候子,子弹的升力系数基本不变,攻角为10°、20°、40°时在马赫数为0.6时升力系数会向下波动,在马赫数为0.8时会向上波动。

图4 俯仰力矩系数随马赫数变化曲线
图4中俯仰力矩系数随Mach数变化呈现出在0.4~0.5马赫数先短暂下降,在0.5~0.6马赫数快速上升最后在0.7~1马赫数下保持在0左右。随着攻角变大子弹的俯仰力矩系数的变化也更加剧烈。
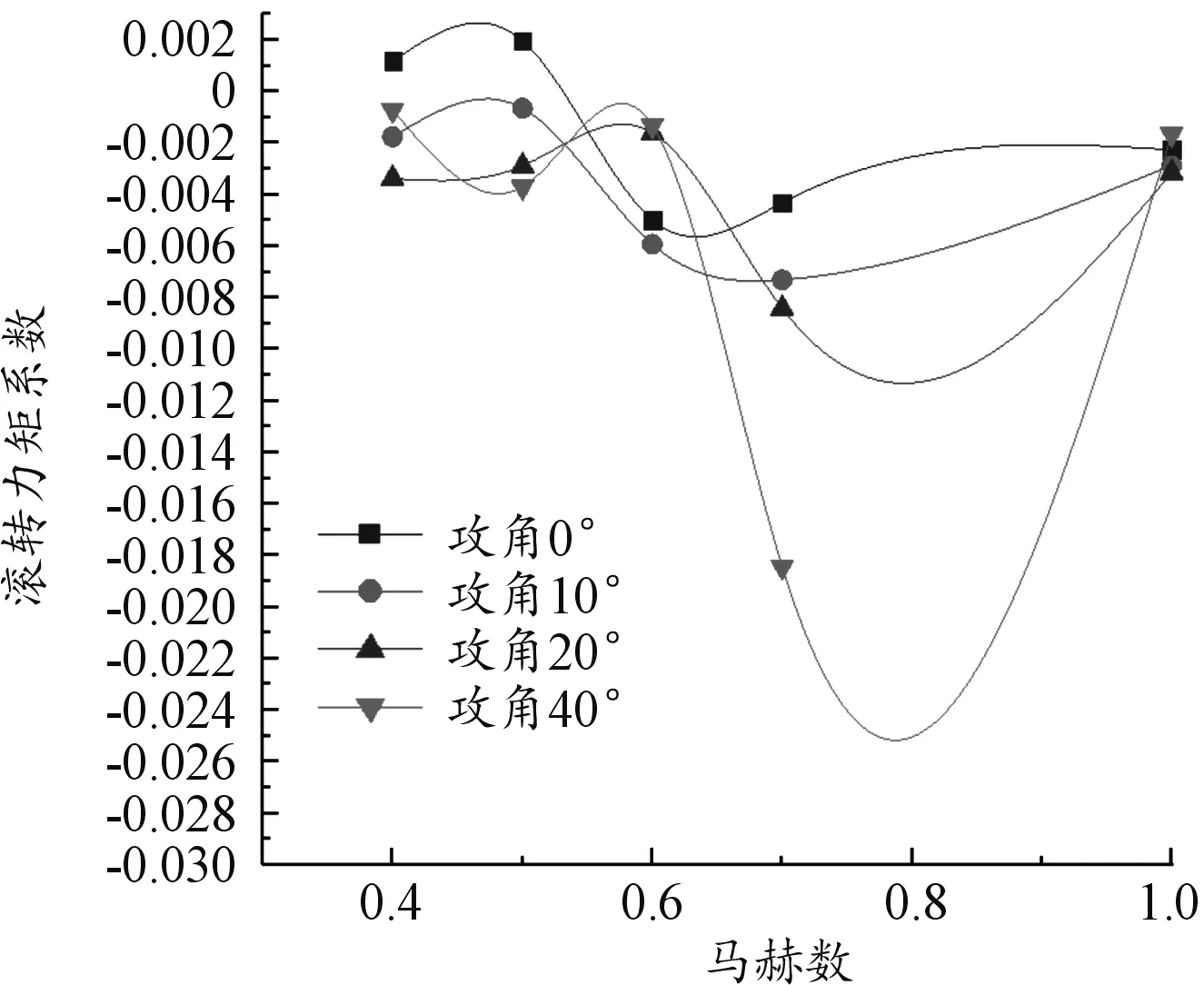
图5 滚转力矩系数随马赫数变化曲线
图6滚转力矩系数随风速变化和图5滚转力矩系数马赫数变化表明当风速小于70 m/s时,滚转力矩系数随风速变化总体呈现上升趋势,而大于70 m/s则开始出现波动变化。当攻角为20°和30°时滚转力矩系数随风速上升的趋势约在85 m/s发生变化,开始波动,当攻角为 -2°到 15°时,滚转力矩系数先随风速增大而上升,在约75 m/s时达到高点然后开始下降。其中滚转力矩系数随马赫数变化呈现的波动变化明显。攻角越大子弹在马赫数为0.8左右时波动幅度越大。滚转力矩系数的变化特征,表明了该子弹在飞行过程中可能会出现子弹的自旋转速在一段时间内变化很小的情况。
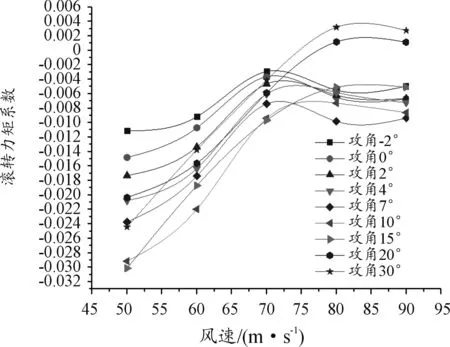
图6 滚转力矩系数随风速变化曲线
3 外弹道仿真计算
子弹在飞行过程中会受到各种空气动力与力矩的作用,空气动力会影响子弹的质心运动的方向和大小。空气动力矩则会影响子弹的转速以及使子弹进行绕心运动。子弹不同的运动状态又会影响到其受到的力和力矩。
作用在子弹上的力和力矩除重力外,还包括空气阻力,升力(法向力),静力矩(俯仰力矩),滚转力矩,马格努斯力,以及温度,气压,风对子弹运动的影响。对于其表达式和各项参数文献[12]中有明确的计算方法,本文不再赘述。
六自由度外弹道方程组:将做用在弹箭上的所有力和力矩的表达式代入弹箭刚体运动一般方程中,就可以得到弹箭六自由度刚体运动方程的具体形式,通常将其称之为6D方程[14]。

式中:x、y、z为弹道坐标系的坐标;m为子弹质量;v为子弹飞行速度;θα为子弹对称轴与x方向的夹角(射角);ψ2为速度方位角;φ2为弹轴方位角;φα为弹轴高低角;ωη为绕弹轴坐标系中η的角速度;ωξ为绕弹轴坐标系中ξ的角速度;Mη、Mζ、Mξ分别为外力矩在弹轴坐标系上3个坐标系方向的上的分量;ωξ、ωζ、ωη为3个坐标轴方向的角速度,γ为转速。初始条件:t=t0,x=x0,y=y0,z=z0,γ=γ0,v=v0,θ=θ0。
4 仿真结果分析
选取不同的初始参数运用六自由度外弹道程序进行运算可以得出子弹的运动规律。选取的子弹的初始参数为:高度5 000 m,初速550 m/s,初始转速0 rad/s攻角为5°射角为0°。
首先求得子弹的运动轨迹,如图7所示。

图7 子弹运动轨迹
从图7可以看出,子弹的运动轨迹为抛物线,可以推测抛撒高度越高,子弹飞行的距离越远。即抛撒高度越高,子弹的落点分布越分散。
通过仿真得到的攻角的计算结果如图8所示(先给出攻角随时间变化,2个方向攻角外摆线)。

图8 攻角随时间变化曲线
图9中表明,对于初始扰动攻角小于5°飞行的子弹,飞行过程中攻角逐渐减小,说明子弹在该条件下的飞行是稳定的。

图9 攻角外摆线
由图10与图11知子弹在出仓后飞行速度迅速减小,随着降落的时间增大,速度降幅也随时间减小。同时,可得子弹在抛撒出仓后转速迅速增加,且在达到峰值之后又迅速下降,下降到最低点后又缓慢上升,最后保持在较低转速不变。子弹飞行中转速的变化表明,子弹飞行可以分为几个阶段,在抛撒出仓后子弹运动速度最大,导致5 s内子弹转速快速增加,然后子弹转速达到最高点后迅速下降(5~10 s)。随后,转速又逐渐增大,到达一定峰值后,又逐渐下降。最后子弹速度保持较低水平,转速也稳定在一定数值。即子弹转速则在10 s到35 s时间内经历了:快速上升、快速下降、稳步上升、稳步下降的4个阶段,最终在35 s之后,保持在约180 rad/s。

图10 速度随时间变化曲线

图11 转速随时间变化曲线
对应于子弹飞行速度变化和滚转力矩变化图,可知初始攻角为5°初始速度约1.6个马赫数,正是滚转力矩系数波动剧烈的区域,因此,才会出现快速上升、和快速下降的现象,随后子弹速度下降,滚转力矩系数的波动幅值减小,转速的变化就比较缓慢。而正是缓慢的转速变化,才容易出现转速闭锁现象。
所谓转速闭锁,从动量矩方程可知,决定转速的自转轴方向外力矩达到平衡的时候,就是出现转速闭锁的时刻[15]。一般的转速闭锁条件,可由尾翼导转力矩和极阻尼力矩的平衡来获得。本研究的子弹中,则转速的变化完全取决于滚转力矩的变化,风洞试验中所得到的数据只有子弹在不同状态下的整体产生轴向旋转的力矩系数,其中包括了尾翼导转力矩、极阻尼力矩、诱导滚转力矩。即本文所述的滚转力矩为以上力矩的合力矩。即在一定的飞行速度和攻角的条件下,子弹在飞行过程中的一段时间内滚转力矩系数接近0,子弹转速也会在一段时间内变化较小,基本维持在一个转速不变。在这种情况下,子弹就发生转速闭锁现象。
5 转速闭锁与飞行不稳定性
由于转速闭锁情况下,有可能导致子弹出现一些飞行不稳定现象,主要的可能是:
1) 转速闭锁时,子弹的自旋转速太小,不能满足陀螺稳定条件,从而导致飞行不稳定。
本文研究的子弹在转速闭锁时的转速稳定在170~180 rad/s,其陀螺稳定因子Sg的数值在7.4~8.3范围内,满足Sg>1的陀螺稳定条件。其中陀螺稳定因子的计算公式为
式中:ρ为空气密度;S为弹丸横截面积;l为弹长;C为级转动惯量;A为赤道转动惯量;γ为转速。
2) 转速闭锁时,子弹的动不平衡或者不对称性,即会形成一种以自转频率的强迫扰动,即会发生共振不稳定现象,导致攻角增大,阻力增大,从而改变子弹的落点位置。如文献[15]中图12.6.5中所示的似月运动情况。
当然,在子弹转速发生变化穿过共振频带的时候,由于时间很短,不会导致飞行不稳定,但是如果子弹转速被锁定到共振频带一段时间,就会形成很大振幅即发生共振不稳定。这就是一种转速闭锁导致飞行不稳定的机理。
此外,当子弹转速不变的时间内子弹的飞行稳定性没有受到影响,依旧保持静稳定和陀螺稳定,则表明子弹的共振频率和转速不相同。
3) 转速闭锁时由其他强迫扰动导致的共振不稳定,如弹腔内移动载荷的振动导致的共振不稳定,即移动载荷在子弹的运动过程中会产生一系列的强迫振动,该强迫振动极有可能会和子弹运动过程中的转速闭锁频率接近而产生共振。
6 结论
1) 子弹在一定的初始参数下的飞行是稳定的。
2) 当子弹在5 000 m的高度初速550 m/s,初始转速0 rad/s,攻角为5°射角为0°时会发生转速基本不变情况,存在发生转速闭锁的可能。
3) 在转速闭锁条件下,有可能发生飞行不稳定。特别当子弹战斗部中有一定的移动载荷,在高速旋转中可能发生共振,可能导致子弹飞行不稳定。
本文的仿真结果对实现子弹的姿态控制和稳定飞行、最终形成均匀的落点散布具有指导意义,下一步将对子弹的飞行弹道进行验证。
