智能驾驶激光雷达避障光学成像系统
2021-12-03刘福
刘 福
(烟台胜信数字科技股份有限公司, 山东 烟台 264000)
1 引言
激光雷达是通过发射激光光束来探测目标位置,速度等特征参数的雷达系统,具有测量精度高,方向性、反应速度快、可靠性高等优点[1-4],由于激光雷达可以形成高达厘米级精度的三维环境地图, 在车辆上使用进行测量距离、绘制三维地图、自动导航与智能驾驶等功能,因此在智能驾驶中是一种非常重要的避障设备[5-8]。
进入21世纪后,智能车载激光雷达因其能快速、精确得到前方目标的三维形貌,同时及时获得和前方目标的距离,角度等方位信息,因此越来越多的国内外学者对智能车载激光雷达进行了深入研究。国外有代表性的有美国Velodyne 公司生产的 HDL 32E激光雷达,德国的 IGI公司生产的LiteMapper车载激光雷达,法国 TopoSys公司生产的 FalconⅡ车载激光雷达,加拿大 Optech 公司生产的SHOALS车载激光雷达和ALTM车载激光雷达,以及Leica 公司生产的ALSSO车载激光雷达,瑞典 TopoEyeAB 公司生产的TopEye车载激光雷达,其中尤其以美国Velodyne 公司生产的 HDL 32E车载激光雷达的最为著名,HDL 32E车载激光雷达基于扫描成像的原理进行工作,它通过激光雷达发射光学系统和激光雷达接收光学系统工作获取目标的距离等信息,能够实时获取待测目标的全方位三维点云图,通过和数字照片技术合成后,获得具有精确距离信息的待测目标的三维图片,实现对待测目标的三维模型。国内对车载激光雷达研制生产的单位较少,目前主要有上海禾赛光电科技公司,深圳雷神智能公司,北京北科天绘公司等企业。近年来越来越多的学者对该领域进行了相关的研究[9-16]。
本文深入研究分析了智能驾驶激光雷达系统的实现原理,考虑了车载环境和实际应用需求,设计了一种智能驾驶激光雷达避障光学成像系统,根据智能驾驶激光雷达系统的整体结构,选取适合系统需求的激光器和光电探测器,确定了智能驾驶激光雷达发射光学系统和接收光学系统的参数要求,应用 ZEMAX 光学仿真设计分析软件完成了两个光学系统的优化设计和成像性能分析,仿真分析结果表明,智能驾驶激光雷达发射光学系统和接收光学系统满足系统整体的设计目标要求。
2 智能驾驶激光雷达的原理和选型
智能激光雷达是智能驾驶汽车中功能最强大的传感器,它可以区分人物海报和行进中的行人,在三维立体空间中建模,检测静态物体,精确测量目标的运动速度。智能驾驶激光雷达系统主要是由发射系统、激光接收系统,发射信号控制处理系统,接收信号控制处理系统,软件系统几个部分组成。
智能驾驶激光雷达按照工作方式分为脉冲式激光雷达和相位式激光雷达两大类。
脉冲式激光雷达的工作原理是其光源采用脉冲激光器,利用脉冲激光器向待测目标发射激光脉冲,利用计数器计算脉冲到达待测目标并返回的往返时间,结合光的速度进一步计算得出物体和目标之间的距离。因为激光脉冲的能量相对集中,因此脉冲式激光雷达的传输距离可以达到很远,可以从几十米到几万米。
相位式激光雷达的工作原理是利用调谐和差频测相等相关技术,通过测量发射光束和从待测目标反射回光束二者的相位差,该相位差包含了待测距离的相关信息,利用相位差来实现对目标距离的测量。相位式激光雷达在使用时需要在待测目标上安装激光反射器,即需要有合作目标,且影响其测量精度的因素较多,包括有大气温度、湿度、调谐频率、气压、光发射功率、稳定性参数等等,相位式激光雷达的传输距离只能从几米到几十米。
3 激光雷达成像系统设计
和相位式激光雷达相比,脉冲型激光雷达具有可测量距离更长,测距速度快,工作时不需要合作目标,隐蔽性好,安全性高等优点,因此总体方案采用脉冲型激光雷达结构形式。
3.1 激光发射光学系统的设计和分析
对于智能激光雷达中激光发射光学系统的激光器,考虑到激光器发出的激光通过激光发射光学系统的透镜组和空气介质时会有一定的能量损耗,为了保证智能激光雷达能够接收到足够的能量,应选择足够功率的激光器。考虑车载环境和实际应用需求,智能驾驶激光雷达避障光学成像系统中激光发射光学系统的设计要求如表1所示。
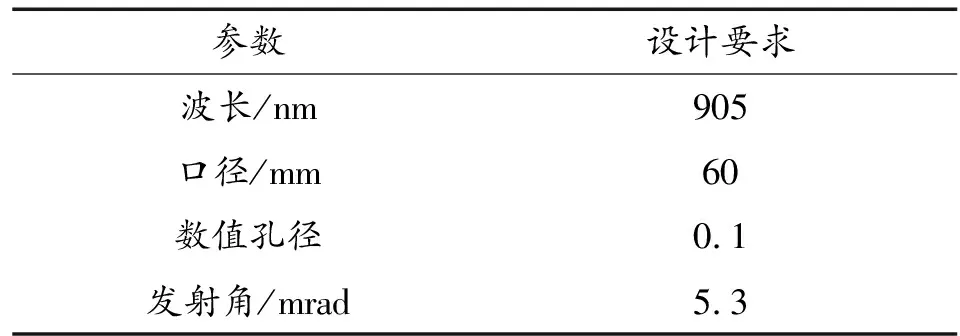
表1 激光发射光学系统的设计要求
摄远光学结构由一个正透镜和一个远离该正透镜的负透镜组成,这种结构形式使得光学系统的主面向外移动,可以使得光学系统的总长小于光学系统的焦距,使得光学系统的结构更加紧凑,缩小光路尺寸,因此此处智能激光雷达的激光发射光学系统采用摄远光学结构形式,该系统倒置过来设计,所设计的智能激光雷达的激光发射光学系统结构如图1所示,激光发射光学系统仅由三块透镜组成,材料均采用F2光学材料,为了校正光学像差,前组的正透镜最后采用复杂化的两片透镜组成,智能激光雷达的激光发射光学系统的焦距为300 mm,而智能激光雷达的激光发射光学系统的总长仅为186 mm,为焦距的1/1.6。
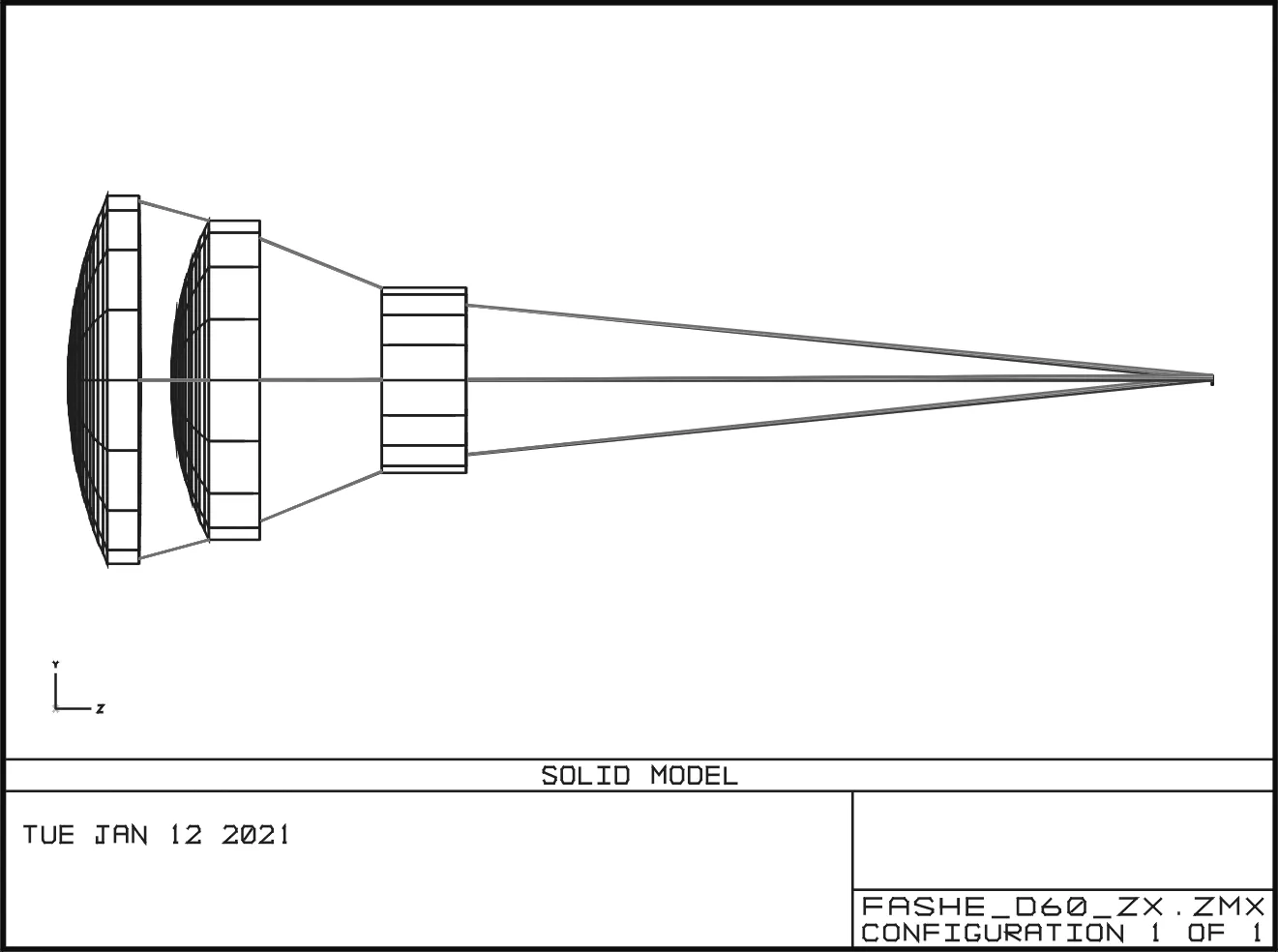
图1 激光发射光学系统结构示意图
图2为了智能激光雷达的激光发射光学系统的点列图,由图2可知,激光发射光学系统的RMS弥散斑半径最大仅为2.44 μm,5个视场的弥散斑大小都很小且均匀。
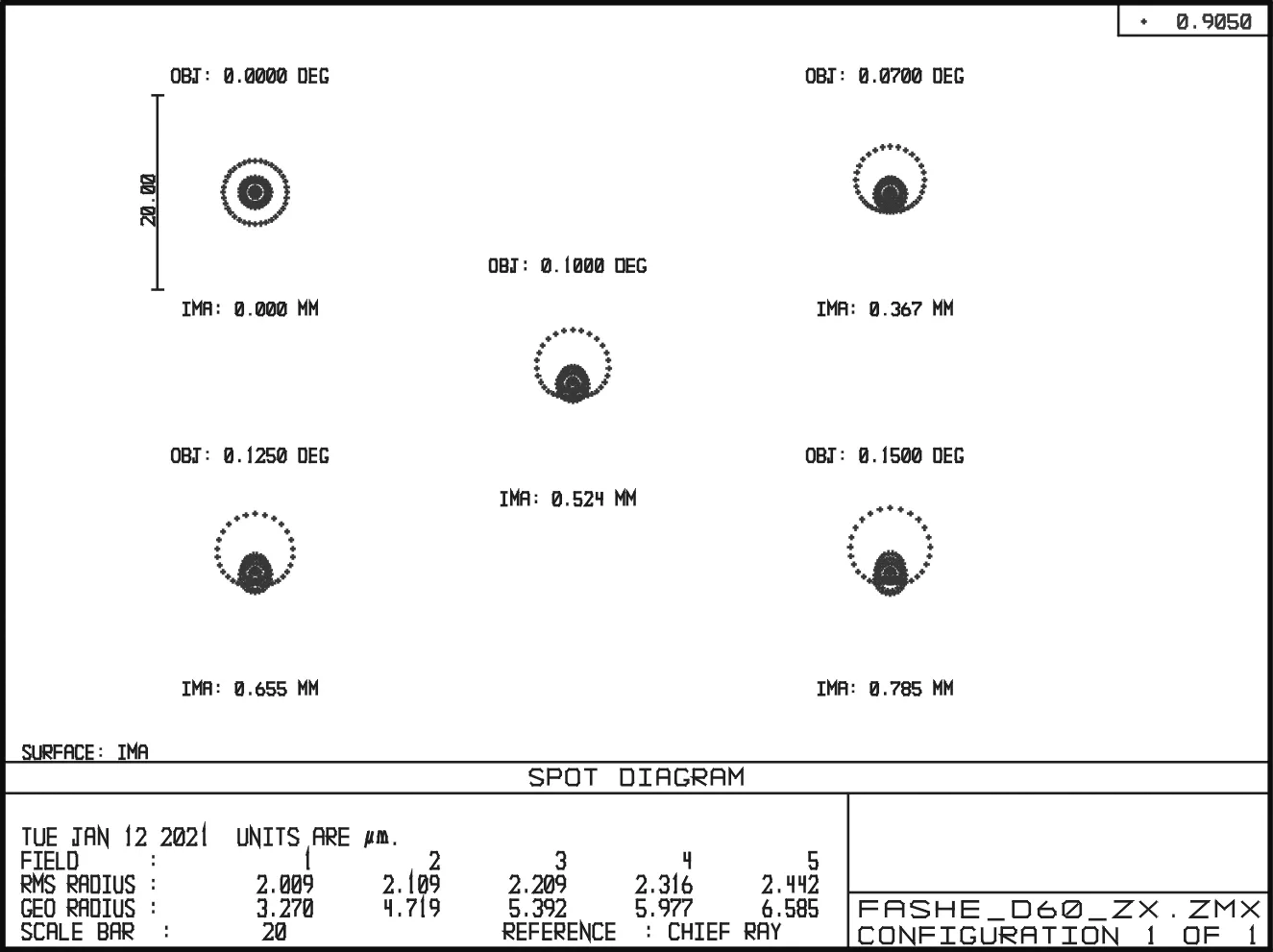
图2 激光发射光学系统点列图
图3表示了智能激光雷达的激光发射光学系统的光线像差,左侧为子午像差特性曲线,右侧为弧矢像差特性曲线,由图3可知,激光发射光学系统5个视场在子午和弧矢方向的光学像差基本一致,数值也很小。
图4表示了智能激光雷达的激光发射光学系统的波像差,由图4可知,激光发射光学系统的峰谷值为 0.031λ,满足瑞利判据小于λ/4的要求。
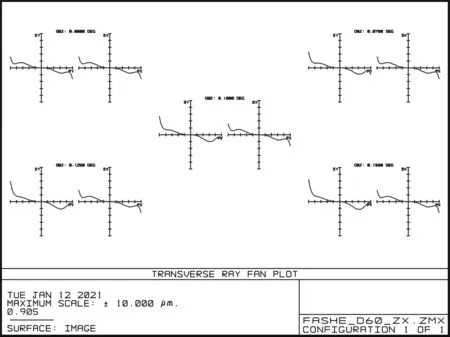
图3 激光发射光学系统的光线像差曲线

图4 激光发射光学系统的波像差图
图5表示了智能激光雷达的激光发射光学系统光学系统的传递函数曲线,由图5可知,激光发射光学系统5个视场在子午和弧矢方向的传递函数都接近系统的衍射极限。
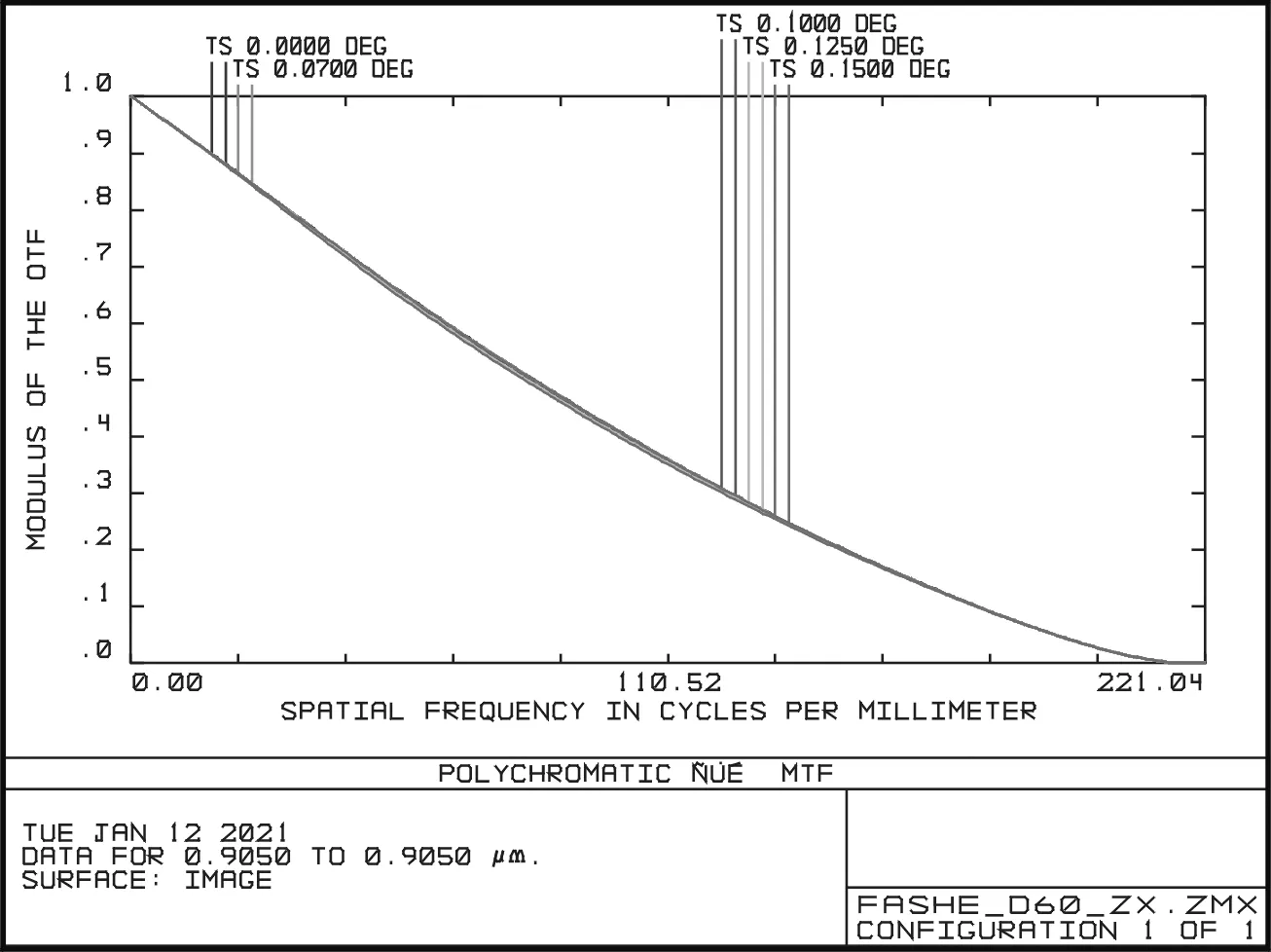
图5 激光发射光学系统传递函数曲线
3.2 激光接收光学系统的设计和分析
对于智能激光雷达中激光接收光学系统的能量接收器,因为测距时是按照激光器发出的激光的来回时间来评估距离的,因此选取对响应时间响应更灵敏的光电检测传感器。考虑车载环境和实际应用需求,智能驾驶激光雷达避障光学成像系统中激光接收光学系统的设计要求如表2所示。
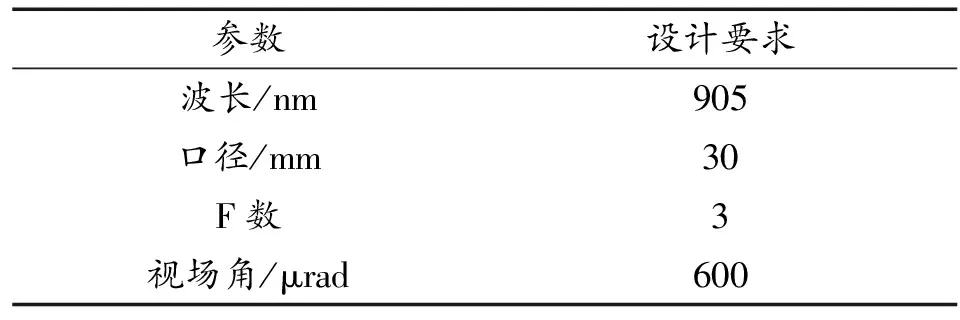
表2 激光接收光学系统的设计要求
为了使得智能激光雷达的激光接收光学系统的结构更加紧凑,激光接收光学系统采用摄远光学结构形式,所设计的智能激光雷达的激光接收光学系统结构如图6所示,激光发射光学系统仅由两块透镜组成,材料均采用F2光学材料,智能激光雷达的激光接收光学系统的焦距为150 mm,而智能激光雷达的激光接收光学系统的总长仅为126 mm,为焦距的1/1.2。
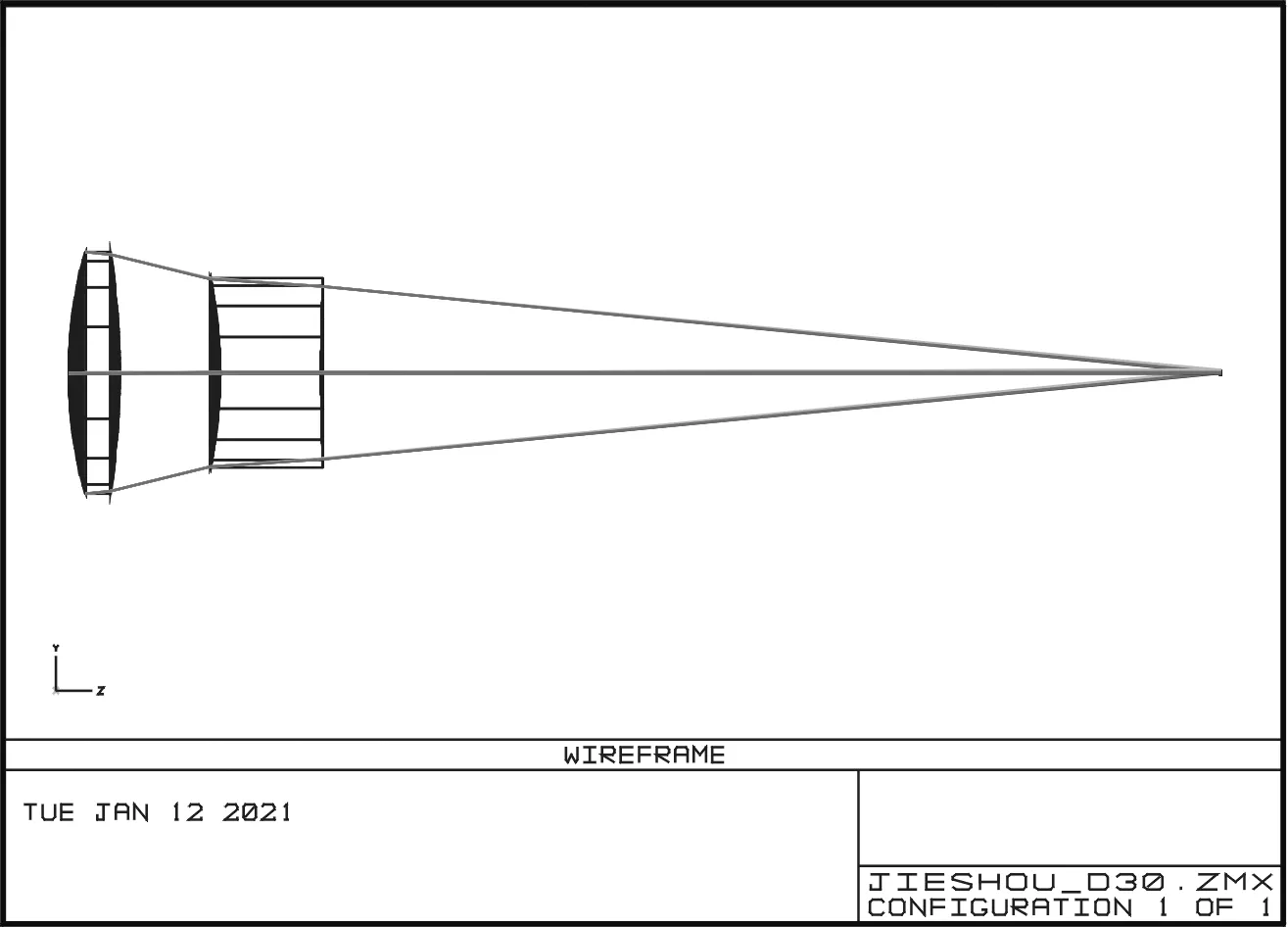
图6 激光接收光学系统结构示意图
图7~图10给出了智能激光雷达的激光发射光学系统光学系统的传递函数曲线,光线像差曲线,点列图,径向能量曲线。由图可知,激光接收光学系统5个视场在子午和弧矢方向的传递函数都接近系统的衍射极限,光线像差曲线平缓,最大的RMS弥散斑半径仅为1.11 μm,在10 μm的圆域范围内所有视场的能量都优于80%,取得很好成像性能。
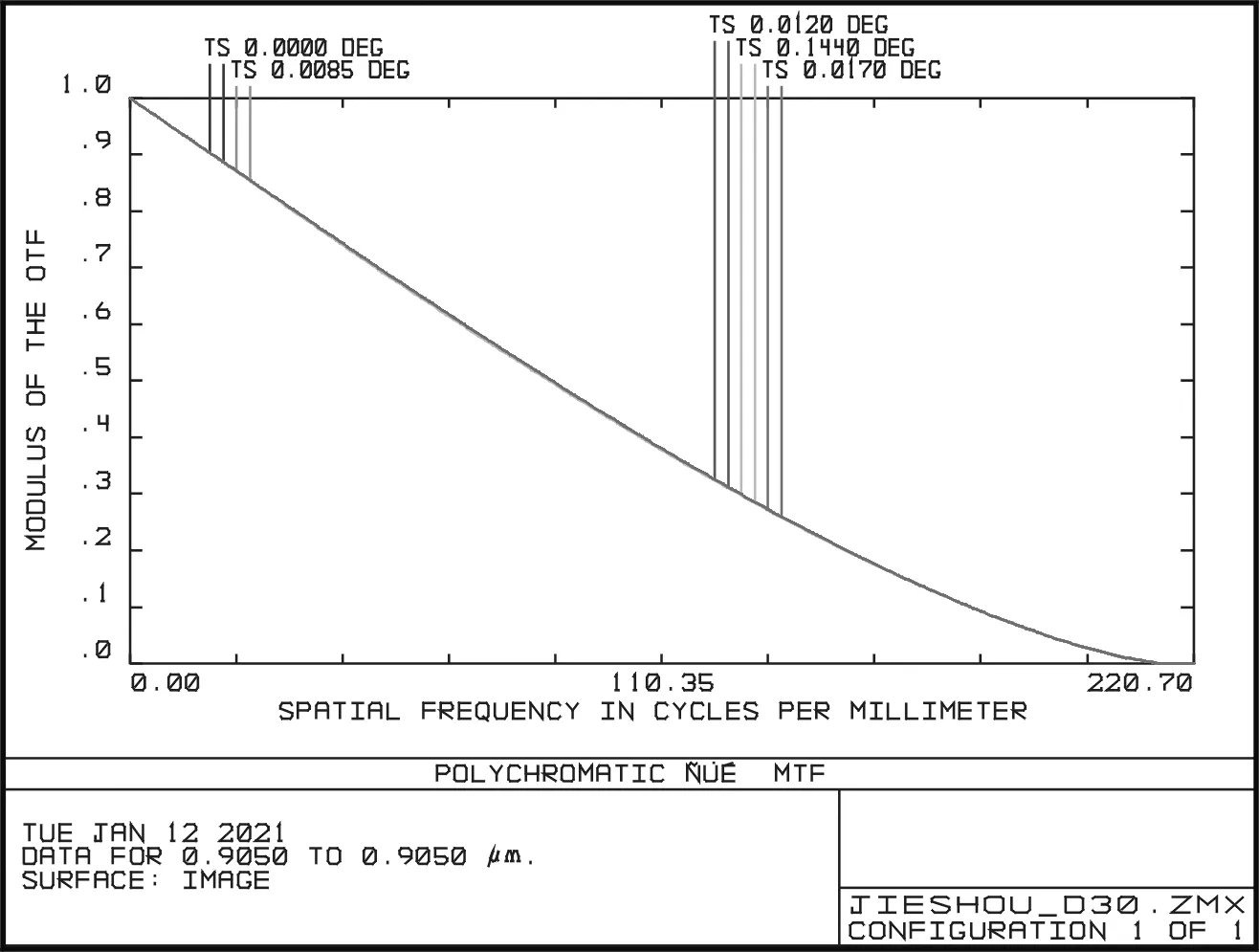
图7 激光接收光学系统传递函数曲线
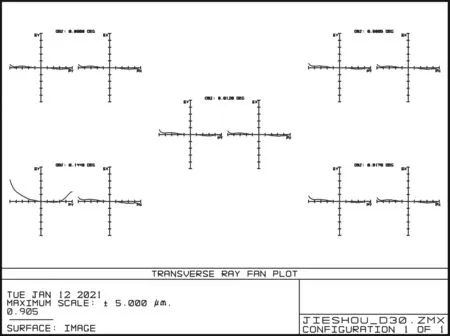
图8 激光接收光学系统的光线像差曲线

图9 激光接收光学系统的点列图
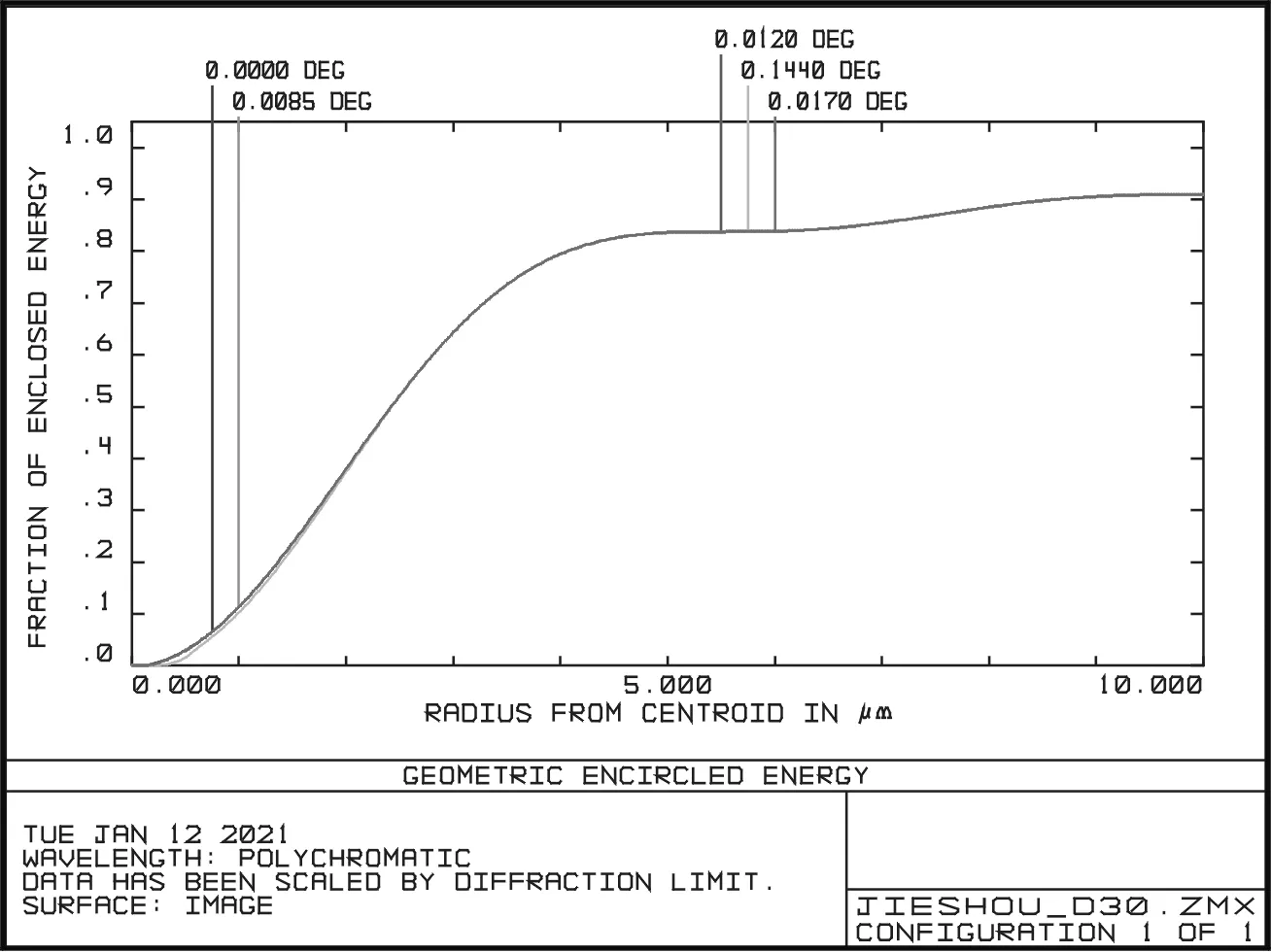
图10 激光接收光学系统的径向能量曲线
4 结论
本文深入研究分析了智能驾驶激光雷达系统的实现原理,考虑了车载环境和实际应用需求,考虑脉冲型激光雷达具有可测量距离更长,测距速度快,工作时不需要合作目标,隐蔽性好,安全性高等优点,采用脉冲型激光雷达结构形式,设计了一种智能驾驶激光雷达避障光学成像系统,根据智能驾驶激光雷达系统的整体结构,选取适合系统需求的激光器和光电探测器,确定了智能驾驶激光雷达发射光学系统和接收光学系统的参数要求,应用 ZEMAX 光学仿真设计分析软件完成了两个光学系统的优化设计和成像性能分析,仿真分析结果表明,智能驾驶激光雷达发射光学系统和接收光学系统满足系统整体的设计目标要求。随着人工智能,计算机视觉,机器视觉,大数据等新技术的发展,可以在智能驾驶激光雷达光学成像系统中引入这些新技术对避障物体进行智能识别探测,对汽车进行智能控制。