军用混合动力系统能量管理策略研究综述
2021-12-03曾繁琦袁晓静王旭平
曾繁琦,袁晓静,王旭平,张 泽
(火箭军工程大学作战保障学院, 西安 710025)
1 引言
军用车辆混合动力系统可以解决车载装备电力需求问题,提高军用车辆信息化水平及控制水平,它不仅仅是一个单纯的作战指挥平台,即各种武器装备的最佳承载平台和应用载体,而且是一个能源平台,如何对系统各部件之间的能量流动进行合理分配是能否发挥整车性能潜力的关键。混合动力系统能量管理策略制定是军用混合动力车辆研究的关键问题之一,车辆性能在很大程度上依赖于动力源的协调控制,控制策略能否适应战场环境下复杂的行驶工况是能否发挥混合动力系统性能优势的关键。因此,设计合理的控制策略对提升军用混合动力车辆的动力性、经济性等性能具有重要意义。
2 能量管理策略研究现状
作为混合动力车辆研究领域的关键问题之一,能量管理策略的优劣直接影响着车辆的可靠性、机动性、经济性和排放性能[1]。目前,根据混合动力车辆控制需要,其能量管理策略可大致分为三类,如图1所示。第一类为基于规则的能量管理策略,具体包括确定性规则能量管理策略、模糊规则能量管理策略和负载功率滤波能量管理策略;第二类为基于优化的能量管理策略,具体包括全局优化能量管理策略和瞬时优化能量管理策略;第三类为基于工况自适应的能量管理策略,它是通过现有信息对未来工况进行预测实现的[2]。
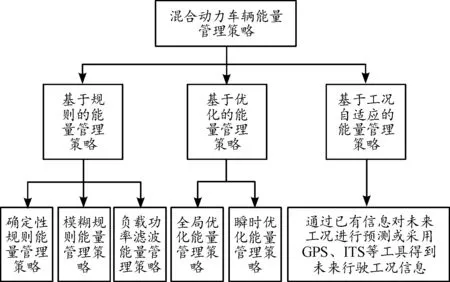
图1 混合动力车辆能量管理策略分类框图
2.1 基于规则的能量管理策略
基于规则的能量管理策略是根据工程经验、数值模型、先验知识或实验数据等人为制定的规则对动力源进行能量分配,依据动力源的功率需求、稳态Map图、车速、动力电池荷电状态(state of charge,SOC)等参数设置工作模式切换条件,实现对系统能量分配方式和流向以及各部件工作状态的控制,最大限度地保证系统各部件工作在高效区域,具有算法简单、易于实现、实时性好的优点,因此基于规则的能量管理策略成为最早用于混合动力车辆的控制方法[1,3-4]。在基于规则的能量管理策略中,根据规则是确定或者模糊与车辆负载功率需求的关系,其可分为确定性规则能量管理策略、模糊规则能量管理策略和负载功率滤波能量管理策略[4-6]。
1) 确定性规则能量管理策略
确定性规则能量管理策略通过设定一组稳态参数限定动力源的开关与工作区域,根据设定规则完成车辆各个工作模式之间的转换,确定动力源的转矩分配方式,即通过电机调节发动机工作点,避免发动机怠速或低负荷运行,使得发动机尽量工作在高效区域,从而提高整车的燃油经济性[7]。现有确定性规则能量管理策略包括单点控制策略、多点控制策略、功率跟随控制策略、发动机最优油耗曲线控制策略、蓄电池辅助控制策略和最大电池SOC控制策略等[8-9]。
童毅等以转矩作为主要控制变量,考虑发动机稳态效率特性、驾驶员需求转矩以及系统部件特性,合理分配了发动机和电机的输出转矩,最终实现了系统效率提高的目的[10];舒红等分析了混联式混合动力电动汽车的工作原理,在此基础上将车辆运行工况划分为充电、放电和制动3种工况,选取系统效率为优化目标建立优化模型,其燃油经济性较传统车提高了36.95%[11];Adhikari等建立的控制规则是以功率平衡方程为基础,控制电池SOC保持在合理范围,保证了发动机工作在高效区域,同时避免了发动机频繁起停。与未安装起动/发电一体机(integrated starter generator,ISG)的混合动力系统相比,燃油消耗降低了9.3%[12];连静等根据混合动力系统结构和动力源稳态Map图对混合动力车辆进行工作模式划分,采用线性约束优化方法求解不同工作模式下系统的效率,以系统效率为优化目标,得到最优效率下各参数的逻辑门限值[13];Dextreit等结合发动机稳态效率特性Map图,将发动机工作区域分为低、中、高3种负荷区域,通过驾驶员意图识别得到当前驾驶员需求转矩。当驾驶员需求转矩很小时,车辆采用电机单独驱动的纯电动模式或行车发电模式;当驾驶员需求转矩处于发动机中负荷区域时,车辆采用发动机单独驱动的工作模式;当驾驶员需求转矩较大时,采用两个动力源混合驱动,发动机处于经济工作区域,电机提供额外转矩。研究结果表明,与传统车辆相比,所制定的控制规则较大程度地提高了混合动力车辆的燃油经济性和排放性[14];Shabbir等采用动力电池辅助控制策略,综合考虑动力电池充放电效率,通过Map图使得混合动力车辆实时运行在高效区域,系统需求功率分配具有实时性,避免了发动机起动与停止次数增加,延长了动力电池寿命。与采用单点控制策略相比,燃油消耗降低了20%[15];周奇勋等综合考虑发动机转矩特性、ISG电机效率特性以及动力电池组充放电特性,优化了3个部件的工作区域,在优化后的控制规则下混合动力系统各个部件均工作在高效区域,制定的模式切换条件实现了混合动力车辆不同工作模式之间的转换[16]。
在确定性规则能量管理策略中,逻辑门限值往往是根据研究学者的经验和实验数据确定的,规则简单,计算量小,对车载控制器的处理能力要求低,工程实用性强,但对于复杂多变的行驶工况和混合动力系统的动态变化均具有较差的适应性,无法保证系统达到最优控制,车辆的燃油经济性仍有提升的空间。为了优化确定性规则能量管理策略的性能,同时增强其工况的实时适应性,研究学者引入模糊控制理论,从而产生了模糊规则控制策略。
2) 模糊规则能量管理策略
模糊规则能量管理策略并不依赖于系统的精确模型,隶属度函数对精确信号进行模糊化处理后形成模糊语言输入,再根据规则库中预先设定好的模糊规则或专家知识进行推理得到模糊结论,最后将模糊结论解模糊化为精确控制命令,协调控制混合动力系统各个部件。模糊规则能量管理策略更加适用于多变量、非线性、时变性的混合动力系统,具有较强的稳定性和鲁棒性。随着算法的不断改进,产生了基于传统模糊控制的改进策略,例如自适应模糊控制和预测模糊控制等策略[17]。
Cairano等对动力电池SOC和发动机转矩分别采用模糊控制方法,保证了发动机时刻工作在效率特性Map图上的高效区域,整车燃油经济性和排放性能得到了提高[18];Murphey等针对混合动力系统采用分层结构,采用模糊控制方法控制发动机输出转矩,保持发动机高效运行,进一步提高了整车的燃油经济性[19];Zhou等制定的模糊规则以驾驶员需求转矩和发动机目标转矩之差和动力电池SOC作为模糊控制器的输入,发动机转矩和电机转矩作为模糊控制器的输出,最终实现了两个动力源转矩的合理分配[20];Bostanian等将智能算法和模糊控制相结合,模糊规则的输入量为车速、需求功率、动力电池SOC,输出量为发动机输出转矩,为了达到改善燃油经济性和排放性的目的,将油耗、电耗、污染物排放、转矩差进行归一化处理,以处理后的参数作为目标函数,采用遗传算法优化模糊控制器中的隶属度函数[21];Chindamo等将神经网络引入到模糊规则能量管理策略中,通过神经网络训练得到的发动机功率和动力电池SOC决定是否进入充电模式,模糊规则再通过电机电流大小决定相应充电模式的持续时间。该能量管理策略应用于某型串联式混合动力车辆,提高了燃油效率和续驶里程[22];Moghbeli等从动态规划优化算法的优化结果中提取模糊规则,将其应用于液力混合动力车辆的系统中,根据提取的规则将系统的工作模式分为五种,整车的燃油经济性得到改善[23];梁俊毅等采用多目标非占优排序智能优化算法优化模糊规则能量管理策略,引入三类混沌算子避免了优化算法陷入局部最优解,从而得到整车的最佳燃油消耗与排放[24]。
模糊规则能量管理策略中的隶属度函数是研究学者通过工程经验确定的,并没有完善的理论指导方法。与确定性规则一样,模糊规则也需要通过大量实验数据的积累而得到,其依赖于隶属度函数的精确度。因此,模糊控制规则仍然无法实现系统的最优控制,随着输入量和输出量的增多,规则集的制定也变得更加困难。虽然有研究学者将智能算法引入到模糊规则中,对隶属度函数进行优化,但仍无法避免模糊规则主观性较强的缺点。
3) 负载功率滤波能量管理策略
在电传动型的混合动力车辆中,若采用前述的规则能量管理策略,负载功率需求的非稳定瞬态过程会对发动机、电机、动力电池等动力源产生较大冲击,导致发动机运行过程中的剧烈波动,同时降低动力电池的使用寿命。因此,考虑到动力源的工作特性,将负载功率需求根据一定规则进行分解,以此作为动力源输出的目标值,达到功率流在动力源之间合理分配的目的,但这种负载功率滤波能量管理策略只适用于包含超级电容等高功率密度储能元件的混合动力系统。负载功率滤波能量管理策略包括非线性比例因子控制策略和基于小波变换的控制策略,2种策略均可以实现合理的功率分流[25]。
张炳力等针对一种包含锂离子电池、燃料电池、超级电容的新型混合动力系统,提出了一种基于小波变换的能量管理策略。仿真结果表明,该策略按照负载功率需求变化频率实现了对3种储能元件能量的合理分配,最终系统性能得到提高,延长了部件的使用寿命,满足设计要求[25];项宇等针对某型串联式军用混合动力车辆开展了能量管理策略研究,根据动力源和负载特性,采用小波变换算法对负载功率需求中的高、低频分量进行分离,将高频分量分配给超级电容,低频分量分配给低输出频率的动力源,实现动力源输出特性与负载频率特性相匹配。仿真结果表明,所制定的能量管理策略达到了预期的控制效果,可应用于军用混合动力车辆[26]。
基于规则的能量管理策略较为简单,可以在一定程度上改善混合动力车辆的燃油经济性和排放性,但规则的制定依据主要来自研究学者的工程经验,导致规则并不完善,从而也不能保证系统达到最优控制。因此,更多的研究学者开始关注优化控制理论与智能优化算法以实现最优的控制结果。
2.2 基于优化的能量管理策略
基于优化的能量管理策略是采用数学分析方法,使定义的成本函数在一定约束条件下最小化的控制方法。通常将混合动力车辆的燃油经济性指标、排放性指标、动力电池电量变化、驾驶性能等作为系统的成本函数,寻求合适的算法最优化混合动力系统性能,能够较好地解决规则能量管理策略存在的问题。目前,根据策略的优化程度和阶段的不同,基于优化的能量管理策略分为全局优化能量管理策略和瞬时优化能量管理策略[27-28]。
1) 全局优化能量管理策略
全局优化能量管理策略是在特定工况下,基于最优控制理论或方法对混合动力系统进行开发研究的一种控制策略。其中心思想是建立以整车油耗或排放为目标函数,系统状态变量为约束条件的系统全局优化模型,采用最优控制算法得到系统动力源能量最优分配状态,最终实现整车最佳燃油经济性或排放性能[29-30]。目前,该能量管理策略中所采用的最优控制算法包括二次规划算法、单纯形法、随机搜索方法、动态规划(dynamic programming,DP)算法、庞特里亚金最小值原理(pontryagin minimum principle,PMP)以及智能优化算法等[28,31],其中研究较多的有基于DP算法、基于PMP以及基于智能优化算法的全局优化能量管理策略。
1951年,为了求解多阶段决策过程的最优化问题,美国数学家贝尔曼提出DP算法。其主要思想是将一个多阶段问题分解成多个单阶段决策问题,状态变量离散化后逆向求解出每个阶段的最优解,在这组最优解中找到全局最优解。DP算法从2000年开始被应用于混合动力车辆控制中,其被研究学者一致认为是较为理想的混合动力车辆控制方法,可以较好地改善整车的燃油经济性,实现系统的全局最优。目前,基于DP的全局优化能量管理策略的主要研究有:
勾华栋采用DP算法得到了混合动力车辆在特定工况下的最优控制序列,从中拟合出发动机输出转矩和需求转矩的比值随变速器输入端转矩的变化规律,研究结果为整车能量管理的实时控制提供了依据[32];巴特等将割线迭代法引入到传统DP算法中,提出了改进的DP算法,为权系数的确定找到了理论依据,同时基于等效油耗的成本函数考虑了动力电池SOC的影响,以成本函数为目标函数,采用反向递推法求解最优控制变量的解集,从最优解集中提炼出合理的动力源转矩分配方式[33];Larsson等将局部线性近似和二次样条逼近与传统DP算法相结合,求解混合动力车辆能量管理问题的解析解,解决了传统DP算法计算量大的问题,降低了计算机仿真过程中的内存需求[34];Ko等采用基于随机动态规划(stochastic dynamic programming,SDP)算法的能量管理策略对混合动力系统进行全局优化,对油耗、排放、电池电量3个量取不同权重值构造成本函数,经多次离线迭代得到成本函数的最优解集[35];Lee等采用SDP算法对混合动力车辆进行控制,首先选取功率与车速作为特征参数,对行驶工况进行分解,然后建立基于Markov Process的概率分布,最后以整车燃油经济性为目标函数建立优化模型。该策略的优化控制方式是通过优化动力源特性得到的,提高了整车的燃油经济性[36]。
20世纪50年代中期,苏联学者Pontryagin等为解决当控制作用集受约束条件限制时如何求最优解集的问题,在经典变分法和经典最优控制理论的基础上提出了PMP,无论受控系统是连续形式还是离散形式,对于求解系统的最优控制问题该原理均适用。基于PMP的全局优化能量管理策略是以最优化原理为理论基础对混合动力系统最优控制问题进行求解,计算量比DP算法小,但可以达到相近的优化效果[37]。继DP算法之后,研究学者对PMP在混合动力系统中的应用也进行了大量探索和研究。目前,基于PMP的全局优化能量管理策略的主要研究有:
Peng等采用基于PMP的全局优化能量管理策略对AT式并联混合动力车辆的能量管理系统进行控制,其优化效果与基于DP算法的能量管理策略很接近,油耗略高0.4%。在该策略的控制下,车辆换挡与车速有关,起到了较好的控制效果,计算时间节约了70%以上,更便于对系统的实时控制[37];Liu等将庞特里亚金最小值原理与等效燃油消耗最小控制策略结合,以油耗和动力电池SOC作为控制目标对并联式混合动力车辆进行控制,控制效果接近全局最优[38];Xu等采用PMP对混合动力系统进行实时控制,建立系统模型并推导得到系统的哈密顿方程,在不影响控制精度的前提下假设动力电池参数满足一定条件,实现了令人满意的优化效果。优化结果得到的燃油经济性与DP算法相近,但计算量较小的突出优势使得PMP算法更便于实现实时控制[39];Onori等提出了一种基于PMP的自适应能量管理策略,混合动力系统可以根据路况行驶条件自动在线调整协变量,比传统PMP的燃油消耗降低了20%[40]。
随着智能优化算法的产生与发展,大量研究学者将遗传算法[41]、粒子群算法[42]、稳健进化算法[43]、博弈进化算法[44]以及神经网络算法[45-46]等智能优化算法应用于混合动力系统能量管理策略的多目标优化中,实现了系统的全局最优。目前,基于智能优化算法的全局优化能量管理策略的主要研究有:
Panigrahi等采用将遗传算法和细菌觅食优化算法相结合的方式作为混合动力车辆能量管理方法,引入时间加权平方误差积分对整车性能进行评价。结果表明,与单一优化算法相比较,联合算法使车辆燃油经济性提高约2%,排放也有所下降[47];Sun等采用神经网络算法对车辆行驶路况信息进行学习预测,优化了混合动力系统的性能,从而提高了整车的燃油经济性[46];夏超英等应用神经网络算法的强大学习能力对当前驾驶环境中的道路信息、驾驶模式、交通信息等进行预测,解决了循环工况和驾驶环境对车辆能量消耗影响的问题,并通过学习DP算法实现了对混合动力车辆功率分配的最优控制[48];杨观赐等采用行为博弈进化算法,以动力性能指标为约束条件并以最小化燃油消耗与污染物排放总量为优化目标,对并联混合动力汽车控制策略参数进行了优化。优化后系统的百公里油耗和污染物排放总和降幅明显,提高了动力源和系统效率,相比于基于最优原理的多目标优化算法,博弈进化算法可以获得精度更高的解[44];陈征等对插电式混合动力公交车开展能量管理策略研究,提出一种进化-增强学习方法。首先,建立系统简化模型并基于增强学习系统以燃油消耗为目标建立优化目标函数;然后,采用进化算法求出最优的能量分配方法并给出最优燃油消耗值;最后,通过仿真分析,对比传统电量消耗-维持策略,所提出的方法提高了12%的燃油经济性,验证了方法的有效性[49]。
全局优化能量管理策略虽然可以最大限度使得混合动力系统性能达到全局最优,从而提高整车燃油经济性,但只有获取未来的行驶工况信息才能进行优化计算,同时无法避免算法计算量大、计算时间长的缺点,因此其实车应用受到了限制。虽然全局优化能量管理策略具有一定应用局限性,但是可以作为一种能量管理策略的评价方法,为实车控制规则的制定提供理论指导。
2) 瞬时优化能量管理策略
为了实现混合动力车辆的实时状态在线控制,瞬时优化能量管理策略应运而生,也被称为实时优化能量管理策略。其中心思想是保证混合动力系统能量管理过程中当前时刻的能量消耗最少或功率损失最小,即保证成本函数在每一时刻上达到最优,基于发动机效率特性Map图得到瞬时最优工作点,保证动力源工作在实时最优状态。目前,瞬时优化能量管理策略中获得最广泛研究的优化方法有等效油耗最小控制策略(equivalent consumption minimization strategy,ECMS)和模型预测控制策略(model predictive control strategy,MPCS)[3]。
基于ECMS的瞬时优化能量管理策略最早是由Paganelli等提出来的,主要思想是将电机消耗的电能等效为发动机的油耗,与实际发动机油耗相加得到等效油耗,在某一瞬时工况下以该等效油耗最小为目标得到此时动力源能量分配方式,即最佳分配方式,从而实现混合动力系统瞬时最优控制,主要的研究有:
黄硕等根据车辆目标车速与实际车速的差值得到当前整车需求转矩,采用ECMS求解得到动力源瞬时优化的转矩分配方式,同时考虑到发动机起闭对燃油经济性的影响,通过规则修正方法对转矩分配方式做进一步调整,实现了整车油耗的进一步降低[50];Gupta采用模糊规则与ECMS相结合的方式对混合动力系统能量管理进行控制,以车速、加速度、动力电池SOC作为模糊控制器的输入量,以电机单独驱动、发动机单独驱动、联合驱动、再生制动四大类工作模式为模糊控制器的输出量,仅在行车发电模式和混合模式中应用ECMS进行需求转矩分配[51];Han等提出了一种预测自适应的ECMS,通过获取一些预测信息或历史数据以调整等效因子的取值,使其随工况变化而不断调整,从而获得更好的车辆性能[52];Zhang等采用一种驾驶行为在线分类方法,提出了一种改进的自适应ECMS,分析了驾驶方式和交通状况对燃油消耗和污染物排放的影响。研究结果表明,可以根据驾驶行为和实时交通信息实时调整等效因子,改善了混合动力系统性能[53];张静等采用ECMS,以油耗和动力电池荷电状态作为控制目标对并联式混合动力卡车进行控制,既保证了算法的实时性,控制效果又接近全局最优[54]。
近年来,MPCS方法鲁棒性强、预测能力强、实时计算能力强,适用于非线性、非精确动态系统的控制,在一定程度上它还可以克服ECMS无预测能力、对行驶工况敏感等缺点[3]。因此,基于MPCS的瞬时优化能量管理策略在混合动力车辆控制领域也得到了广泛应用[7]。其中心思想是通过在线识别混合动力系统动态参数,将整个循环工况燃油经济性的全局优化转化为预测区间内的局部优化,通过对动态参数进行滚动循环优化,更新预测出车辆下一段时间区间的工作状态从而获得优化结果[1]。目前,基于MPCS的瞬时优化能量管理策略的主要研究有:
赵韩等采用基于模型预测的能量管理策略对并联式混合动力车辆的整车需求转矩进行预测,建立转矩分配问题的马尔科夫模型,并结合动态规划算法,以油耗最小化为目标进行优化控制,实现了较好的优化效果[55];Cairano等结合马尔科夫链随车学习方法提出了一种改进的随机MPCS,应用于一款串联式混合动力车辆的能量管理中,通过驾驶员感知控制车辆,对随机参数可以实时重新配置以适应驾驶员行为的变化,同时可以约束动力电池功率以及充放电状态,在实际驾驶循环中可以更好地预测未来的驾驶员功率需求,实现了实时控制[56];Yu等提出了一种基于坡度信息的MPCS,考虑不同道路坡度和阻力系数建立混合动力车辆的动力学模型,通过仿真分析在不同道路状况、预测时间、车辆充放电状态下路面信息对燃油经济性的影响。结果表明所提出的方法在提高燃油效率方面是有效的,采用连续广义最小残差法求解MPCS问题,取得了较好的节能效果[57];Homchaudhuri等提出了一种用于城市网联车辆的快速MPCS,利用交通信号灯定时信息、车辆之间的通讯信息开发控制策略,从而减少红灯停车次数,提高燃油经济性。仿真结果表明,该方法可以提高网联汽车互联性能和效率,解决了非线性能耗问题[58];Shi等将非线性MPCS应用于混合动力车辆的动态控制中,优化了运行程序,通过仿真对比分析,所提出的控制策略在混合动力车辆能量管理策略设计中是有效可行的[59]。
随着我国经济社会的发展和人民生活水平的不断提高,我国对粮食的需求量不断增加。近年来,绿色食品已成为人们购买和购买的热点。大豆意味着在生产和种植过程中,大豆生产基地周围的环境是良好的,没有城市污染。同时,在施肥过程中采用绿色肥料。大豆产量完全符合国家标准。然而,在大豆的种植过程中还存在病虫害许多问题,本文将对些提供相关的经验,以共参考。
瞬时优化能量管理策略是针对混合动力车辆瞬时工况的能量分配进行优化控制,计算量相对较小,易于实车应用,但优化过程并未考虑驾驶风格、行驶里程、能量价格比等因素对燃油经济性的影响。因此,瞬时优化结果无法保证全局最优,车辆燃油经济性仍有很大改善空间。
2.3 基于工况自适应的能量管理策略
近年来,随着数据挖掘和大数据技术不断提高,研究人员更加关注能量管理策略的工况适应性与实时控制性,因此人们开始深入研究工况预测技术与识别算法,进一步实现整车性能的优化。基于工况自适应的能量管理策略是通过分析现有行驶工况信息对未来某一段时间内的行驶工况进行预测,或者通过地理信息系统(GIS)、全球定位系统(GPS)、智能交通系统(ITS)等工具得到未来行驶工况信息,根据获取的工况信息实时调整混合动力系统的工作方式进而实现系统的自适应控制。
Xing等提出了一种基于循环工况识别的自适应能量控制策略,通过对行驶工况片段的研究,分析其特征参数,在此基础上提出了面向10个特征参数的学习矢量量化(learning vector quantization,LVQ)神经网络识别算法。仿真结果表明,该方法具有很好的识别精度[60];Leroy等以车速、加速度、动力电池SOC和发动机状态4个参数建立马尔科夫链预测模型,采用随机DP算法优化系统的能量分配,再将有约束的能量管理策略在线优化转换为无限时域的离线优化[61];Zheng等基于GPS和GIS的道路信息建立预测模型,以油耗最小为优化目标,动力电池SOC和功率分别为状态变量和控制变量,根据预测的未来行驶工况信息,采用PMP对整车的能量分配进行优化[62];Sun等采用径向基函数神经网络和PMP相结合的能量管理策略,对行驶工况进行预测的前提下优化混合动力系统的能量分配,优化过程中拉格朗日乘子随工况的改变而不断调整,从而提高了能量管理策略的工况适应性,进一步改善了车辆的燃油经济性[63];Wang等对工况识别结果进行了分析,得到特征参数、预测周期、识别周期、工况类型之间的关系,从中选取最优预测周期和识别周期,结合LVQ神经网络算法对实际行驶工况进行工况识别,最后采用等效油耗最小控制策略提高了整车燃油经济性[64];刘永刚等以GPS和GIS作为工具获取工况信息,建立道路坡度预测模型,采用相似行驶工况估算坡度的能量消耗,得到车辆在进入坡道前动力电池SOC的目标值,在电量维持模式和电量消耗模式下实现了对预充电时刻的规划[65];詹森等提出将K均值聚类方法和遗传算法相结合的行驶工况识别方法,基于此工况识别方法,应用ECMS实时优化混合动力系统的能量分配[66];连静等采用模糊控制方法对行驶工况进行识别,然后应用考虑动力电池SOC平衡的ECMS求解不同工况下的最优控制参数,从而实现了对动力源能量分配的实时控制[67]。
基于工况自适应的能量管理策略只根据历史工况信息或通过GPS、GIS、ITS等工具获取未来行驶工况信息,计算量不大,但如果行驶工况信息预测方法选择不当,仍旧会影响其在实车上的应用,并且该策略得到的能量分配方式也不是全局最优。
3 存在的问题
综上,每种能量管理策略都有相应的优缺点,具体特点如表1所示。
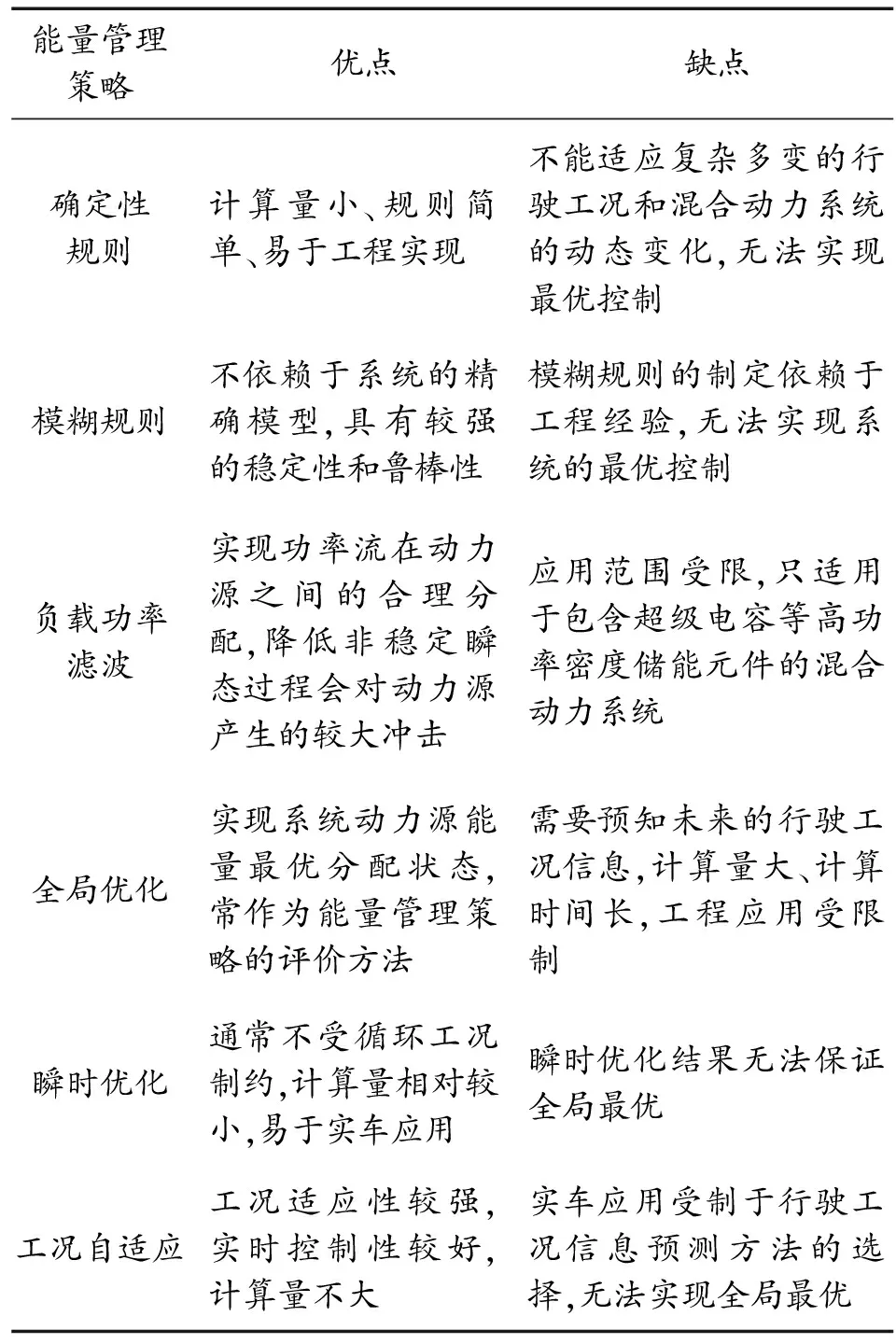
表1 能量管理策略特点对比
在传统民用混合动力车辆控制策略研究中,受到系统优化目标和车辆使用环境条件的影响,控制方法灵活多样、日渐成熟,但每种控制策略都有相应的局限性。目前混合动力车辆能量管理策略具有算法复杂、抗扰动能力弱等缺点,一部分基于优化的能量管理策略复杂,受限于控制器的运行能力难以实现实时控制,对于运行特性复杂的军用混合动力车辆并不适用且控制难度大。例如,随机DP算法对控制器参数和环境噪声比较敏感,不适合在军用车辆干扰严重的恶劣工作环境中使用;现有的单一驾驶循环工况适用于民用混合动力车辆,但无法满足军用车辆面向战场的使用要求;神经网络算法训练样本需求量大且无法在线运行的缺陷限制了其使用范围,无法在军用车辆上实现;GPS、GIS、ITS等智能工具可用于民用车辆预测未来行驶工况,但不适合军用车辆。因此,应该选择算法简单、实时控制效果好、工况适应性强的控制策略作为军用混合动力车辆能量管理策略。
目前,虽然有不少关于规则能量管理策略和瞬时优化能量管理策略的研究,但这2种策略都只是单独使用,二者组合成新的混合控制策略会比单独使用效果更好,可以取得和全局优化接近的控制效果,适合军用混合动力系统的能量管理。同时,军用混合动力车辆的工况较多,不同工况下的系统特性又有很大差别,能量管理策略的控制效果很大程度上取决于其对各种工况的适应性。目前,模糊控制、神经网络、支持向量机等算法虽然在工况识别方面可以获得较好的识别效果,但受限于车载控制器的运算能力,算法程序无法直接导入控制器进行实时控制,因此如何选择合理的工况识别算法是能量管理策略应用于军用混合动力车辆的关键。同时有研究表明,只有获取行驶工况信息,实时优化控制才能实现真正意义上的优化[68]。
4 结论
随着智能优化算法、物联网等技术的不断发展,军用混合动力系统能量管理今后的发展趋势,大体有以下3个方面:
1) 多目标协调优化的能量管理策略。传统的能量管理策略基本只考虑动力性和经济性两个指标,对排放性、动力电池成本和使用寿命、系统的寿命成本以及驾驶员驾驶行为等指标进行综合优化的研究较少,可以根据军用混合动力车辆在不同战场环境和运行工况下,考虑各个指标所占权重,对各个指标进行协调优化,作为整车能量管理的控制原则,也是研究能量管理策略的最终目标。
2) 混合式控制的能量管理策略。如前文所述,每种能量管理策略都有相应的优缺点,采用2种或者多种能量管理策略相融合的方式,综合了各种能量管理策略的优势,组合成新的控制策略来弥补各自的缺点,取长补短以达到更好的优化效果。如逻辑规则能量管理策略和等效油耗最小控制策略的组合比单独应用某一控制策略要有更好的效果,也符合军用车辆能量管理策略未来的发展趋势。
3) 更丰富的动力源与新技术的应用。与民用混合动力系统不同,军用混合动力系统中还存在大功率用电负载,这就需要考虑开发和引入新型电源部件(如超级电容),因此,军用车辆能量管理策略需要实现新型电源部件与原有动力源的协同控制;动力源丰富的同时也使得算法更复杂,加深了其与能量管理策略优化实时性的矛盾,分层控制技术与云计算技术的引入为解决这个问题提供了新思路与技术支撑。
