基于改进人工势场法电力巡检无人机航迹规划*
2021-12-01苗东东徐海明
苗东东 吕 品 王 庆 徐海明
(1.合肥工业大学工业与装备技术研究院 合肥 230009)(2.中国科学院合肥智能机械研究所 合肥 230031)
1 引言
随着无人机技术的发展,无人机在电力巡检的应用越来越广泛,其中无人机在对电力系统的自主巡检的研究成为热点之一。现有的大多数无人机仍然采用远程操控和跟踪预定的航迹[1~2],所使用的航迹规划方法多数是在已知的环境下,且飞行过程中环境条件不变。目前常用航迹规划方法主要有人工势场法、粒子群算法、A*算法、遗传算法、蚁群算法等[3~4]。
基于人工势场的方法是机器人进行路径规划的主要方法之一[5]。它的基本思想是将机器人在周围环境的运动,想象成在一个抽象的人造引力场中的运动,目标对移动机器人产生“引力”,而障碍物对移动机器人产生“斥力”,最后通过合力来控制移动机器人的运动。应用势场法规划出来的路径一般是比较平滑并且安全,但是这种方法存在局部最优问题[6]。为了解决局部最优、目标不可达问题,很多学者对该算法进行了改进。程志等在文献[7]中引入机器人前进的方向向量,对斥力的生成和计算机制进行了调整以解决在局部最小点无法继续路径规划的问题,当机器人处于陷阱区域时设立虚拟目标点以引导机器人摆脱陷阱区域。Ulis⁃es Montiel O等在文献[8]中提出了一种并行进化人工势场(PEAPF)的概念,在可到达的配置集中,该方法在具有动态障碍物的复杂世界中可实现可控性。该算法结合传统APF利用新型处理器架构获得了一种灵活的路径规划导航方法,效果优于APF和EAPF,更适合实时应用。梁献霞等在文献[9]中在改进的势函数基础上通过扇区划分的方法,当机器人陷入局部最小值时在其周围增加虚拟障碍物,使其在目标点和原障碍物的共同作用力下摆脱局部最小值。罗强等在文献[10]中只考虑机器人移动方向一定夹角范围内的障碍物,引入目标点与机器人的距离因子,解决目标不可达的问题,并且提出了切线法和搜索法解决局部最小点问题。贾正荣等在文献[11]中将路径规划环境中的障碍物进行凸化,改变人工势场方法斥力势场的方向,改善了因凹凸障碍物致使机器人无法到达目标的情况。于振中等在文献[12]中在斥力势中添加系数项,解决了目标点与障碍物过近时导致目标不可达的问题,将机器人与动态障碍物的相对速度引入势场函数,实现动态环境下的路径规划,并在局部极小点添加一个附加势场来引导机器人跳出局部极小点。
本文首先结合无人机电力巡线背景引入理想巡检路径,对无人机探索障碍物的方式以及对传统的人工势场函数进行调整以适应不同形状的障碍物。增加无人机在理想路径投影点对无人机的吸引力,使无人机始终有在理想路径飞行的趋势;当无人机进入陷阱区域时,改变无人机感知障碍物的方式,使无人机摆脱陷阱区域,从而提高巡检效率以及避开障碍物的能力。
2 传统人工势场法
人工势场法是由Khatib提出的一种虚拟力法,该方法是将机器人在环境中的运动,抽象为在虚拟力场中的运动,通过势场中的力引导机器人运动[13~14]。势场分为两种,障碍物对机器人产生的斥力场和目标点对机器人产生的引力场,两者叠加后的产生的合力场决定着机器人的运动,促使机器人向着目标点移动[15]。
机器人在规划路径的空间中运动,假设机器人、目标点和障碍物都是质点,X表示机器人所在的位置,Xo表示障碍物的位置,Xg表示目标点的位置。障碍物对机器人的斥力场为Urep,目标点对机器人的引力场为Uatt,合力场为Utotal。
2.1 斥力函数
机器人在路径规划的环境中受到障碍物产生的排斥力,机器人与障碍物的距离越近,则所受的排斥力越大,反之则越小。斥力势力函数定义为

式中,m为斥力势场比例增益系数;ρ(X,Xo)为机器人与障碍物之间的距离;ρ0为障碍物的影响半径。当机器人与障碍物之间的距离大于ρ0时,机器人不再受到其排斥力。
斥力场的负梯度得到斥力Frep:
当机器人同时位于n个障碍物的影响范围内时,机器人所受的斥力合力为
2.2 引力函数
当机器人在路径规划的环境中时,受到目标点的吸引力,机器人与目标点的距离越小,则引力越小,反之越大。当机器人所受引力为零时,表明机器人已经到达目标点。引力势场函数定义为

式中,k为引力势场比例增益函数;ρ(X,Xg)为机器人与目标点的相对距离。
引力场的负梯度得到引力Fatt:

机器人所受的合力Ftotal为

机器人在合力Ftotal的引导下,可以有效地避开障碍物并达到目标点。但是传统势场法存在几个缺点。
局部极小点是传统人工势场存在的主要问题,当机器人所受的合力Ftotal为零或者其方向与斥力或引力的方向相同时,机器人会出现停止运动或者徘徊的情况。目标不可达也是一个缺点,当障碍物在目标点附近时,由于吸引力小于排斥力导致机器人无法到达目标点。最后是计算繁杂,在路径规划环境中,要计算机器人受每个障碍物的排斥力。
3 改进人工势场法
根据无人机本身的特点以及在巡线中的应用背景,并针对未知环境,对人工势场的势场函数以及应用方法做出调整。使无人机在基于人工势场的路径规划下,更好的完成巡检任务和实现避障。
传统的人工势场只考虑机器人在规划的环境中目标点的引力和障碍物的斥力,只要求无人机在合力的引导下到达目标点,而对机器人所走过的路径没有太多的要求。无人机在电力自主巡线中,为了达到更好的巡线效果,无人机应该沿着理想的巡检路线,这样才会更好地检测电力线的状态。针对电力自主巡线,理想的巡检路线即理想路径。在改进的人工势场法中,引入无人机在理想路径投影点的引力场U′,使无人机在飞行的过程中始终具有沿着理想路径飞行的趋势,其中定义U′为

式中,λ为比例增益系数;Xe为无人机在理想路径的投影点的坐标;ρ(X,Xe)为无人机到其投影点的距离;d0为常量。
无人机在理想路径投影点的引力场的负梯度得到引力F′:

则无人机在航行时环境中的势场函数为

当有n个障碍物时,无人机所受的合力为

四旋翼无人机在巡线中,设置无人机的探测半径R、初始速度V0、最小速度Vmin、最大速度Vmax、最大加速度amax、最大转弯角度αmax,并且考虑到无人机的尺寸大小。这样,规划出的航迹较为平滑,更加适合无人机的飞行。
同时结合电力巡检无人机的应用背景,规定无人机的探测范围,如图1所示。
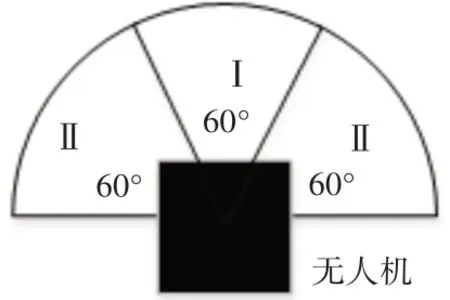
图1 无人机探测范围示意图
无人机只计算在探测范围内出现的障碍物,这样不仅可以减少计算量,也提高了机器人路径规划效率。
局部极小值是传统人工势场的一个缺点[16]。这里通过无人机飞行的惯性以及设置无人机的最小速度的大小,无人机一般可以越过局部最小值。针对目标不可达问题,即障碍物在目标点的附近,我们设置最小吸引力的大小也可以解决。但是当无人机遇到U型障碍物时,无人机就会被困在陷阱区域,这是因为无人机所受的合力在无人机机头的方向的分力较小,而在侧边的分力较大。
当无人机在困在U型障碍物时,判别公式为

式中,Xt为无人机在t时刻的位置;Xt-t1为无人机在t时刻前t1时刻的位置;ρ(Xt,Xt-t1)为无人机在两时刻位置之间的距离;d1为常量。
当无人机陷入凹型区域时,这时候调整无人机的探测范围,将无人机的探索范围由(Ⅰ+Ⅱ)区域,改为Ⅰ区域,如图1所示,这时无人机就会忽略两侧的障碍物的排斥力,目标引力调整为最小引力,避免引力过大牵扯无人机,因为无人机具有一定的速度,并且设定有最小速度值,当机头转向U型障碍物外侧的时候,机头方向无障碍物,这时,只存在目标点的最小吸引力,侧方障碍物的排斥力为零。无人机依靠自己的速度前进就可跳出障碍物,当无人机探测到障碍物时,理想路径投影点的吸引力为零,避免对无人机避障造成干扰。
4 仿真实验与分析
4.1 算法描述
四旋翼无人机在巡线的过程中,其改进人工势场法路径规划流程图如图2所示。
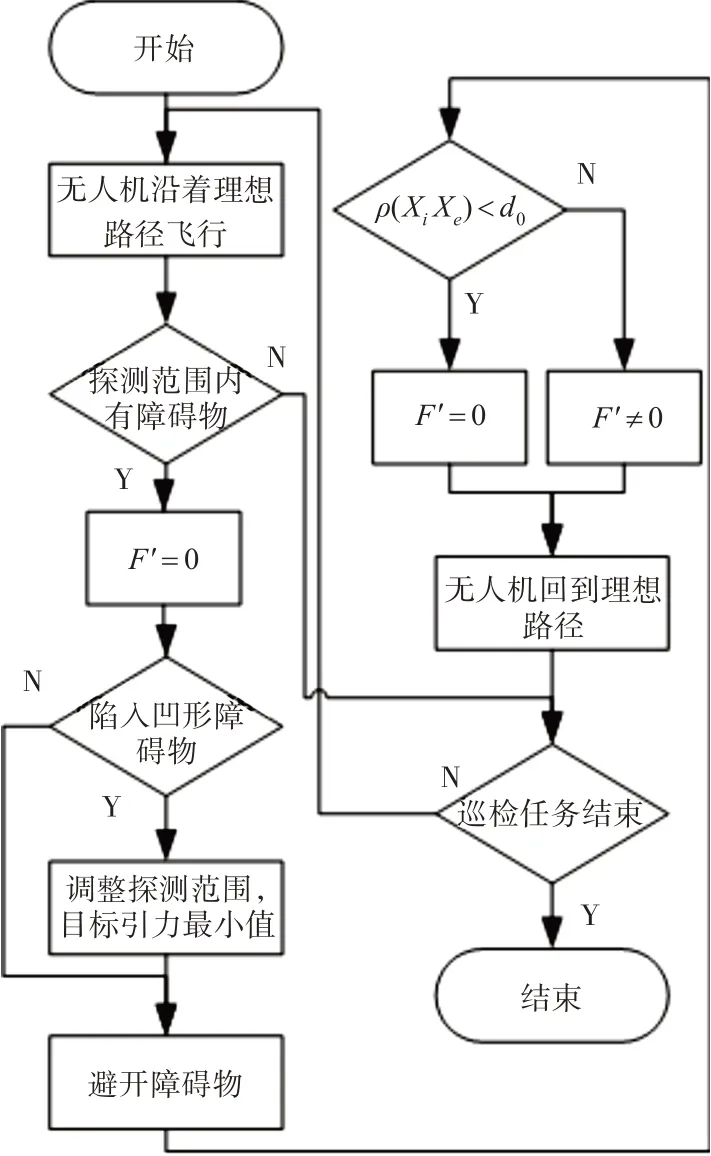
图2 基于改进APF无人机路径规划流程图
无人机在电力巡线过程中,首先沿着理想路径进行巡检,当无人机探测范围内探测到障碍物后,无人机受到其在理想路径投影点的引力为零,无人机开始避障。如果无人机由式(10)判断陷入U型障碍物,则无人机的调整探测范围,即只探测无人机的机头方向,目标吸引力此时调整为最小吸引力,最终无人机摆脱障碍物。无人机的探测范围内没有障碍物之后,无人机就会受到其在理想路径投影点的引力。当无人机与理想路径的距离小于d0时,F′=0,这样避免无人机始终受到F′≠0的作用而在理想路径附近震荡。至此,无人机避开障碍物后也可以快速回到理想路径进行巡检。
4.2 仿真实验
无人机在巡线中,结合无人机实地巡线背景,考虑到无人机的飞行时间,这里理想路径设置为与电力线等高,具有一定距离并与电力线平行一条直线,四旋翼无人机抽象为一个矩形,因此可以在二维环境中研究无人机的路径规划问题。
为了验证本文提出的算法,本文分别在相同的环境中进行了传统人工势场法的路径规划和改进后的人工势场路径规划。
选取算法的初始参数如表1所示。
在这里进行简化实验,根据前文规定的探索范围,在探测范围内规定均匀的分布9个方向,每个方向之间的夹角为22.5°,仿真结果如图3所示;
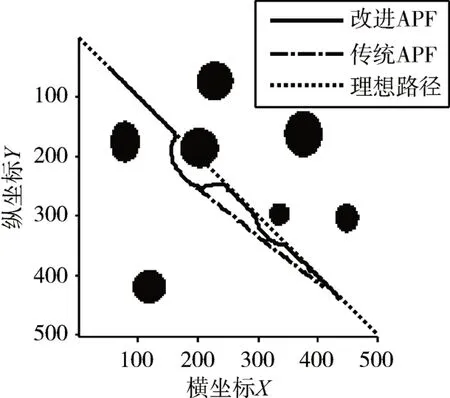
图3 传统APF与改进APF的路径轨迹
为了比较传统人工势场法和改进人工势场法与理想路径的重合程度,引入评价因子S:

式中,Xi为无人机的位置;ρ(Xi,Xe)为无人机到其在投影点之间的距离。S越小,则说明无人机的航迹与理想路径的重合度越高。传统人工势场法与改进人工势场法的S值如表2所示。

表2 两种方法的S值
由图3以及表2中可以看出,改进人工势场法中无人机的航迹与理想路径的重合度更高。
传统人工势场法中,无人机一般会困在U型障碍物中,如图4所示,无人机进入陷阱区域无法逃出。这是因为无人机所受到的合力在机头的分力较小,而在无人机一侧的分力较大。针对U型障碍物,根据前文所述算法进行仿真实验,调整探测范围后则Ⅰ区域有3个方向,仿真实验结果如图5所示。
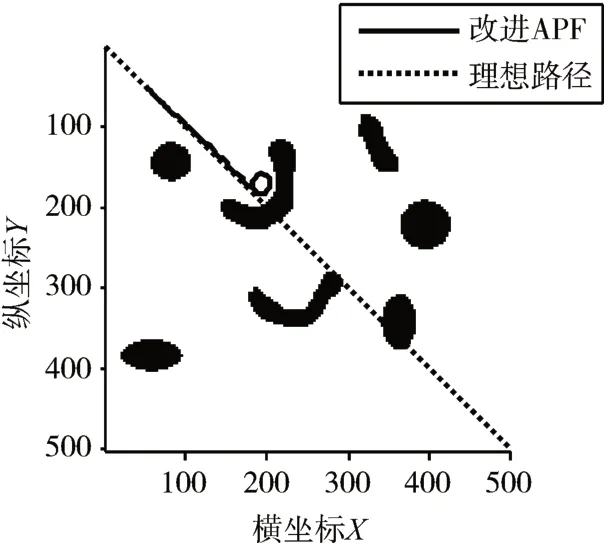
图4 传统APF下无人机陷入U型障碍物
从图5中可以看出,通过此方法,无人机可以很好地脱离U型障碍物并达到目标点。
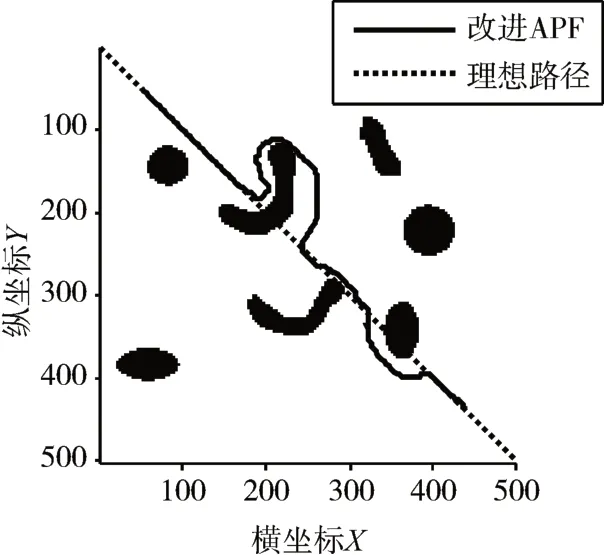
图5 改进APF下无人机逃脱U型障碍物
5 结语
本文结合无人机在电力巡线的背景下,针对四旋翼无人机航迹规划问题,提出了一种基于人工势场的航迹规划方法。引入了无人机理想巡检路径以及无人机在理想路径投影点的引力场,使无人机具有在理想路径上飞行的趋势,提高无人机巡线的效率;并针对U型障碍物,提出缩小无人机的探测范围,并对引力、斥力做出调整,使无人机摆脱U型障碍物,仿真实验验证了此种无人机航迹规划的有效性。
