群塔交叉作业安全措施经验探讨
2021-11-26薛继方XUEJifang
薛继方/XUE Ji-fang
(中国水利水电第八工程局有限公司,湖南 长沙 410004)
随着城镇建设的高速发展,建筑中大型工程和群体工程越来越多。为了使施工高效而有序地进行,多台塔机在同一区域进行作业的现象日益普遍。这就难免在狭小区域内频繁出现交叉作业、相互干扰的情况,存在极大的安全风险。因此,施工单位必须根据实际工作情况,对现场塔机的布置和高度配置进行合理的设计,并制定相应的安全防护措施。
1 工程概况
由我公司承建的科威特大学城项目工程占地面积67 000m2,建筑面积264 094m2,工程总工期1 222 天。根据工程施工需要,并综合考虑建筑物高度、施工面、塔机附着安拆等因素,拟采用7 台塔机以满足施工需求,分别布置在男子校区3 台,女子校区4 台,详细布置如图1 所示。男子校区布置2 台TC6517B-10E 型塔机和1 台TC7030B-12 型塔机,3台塔机工作区域相互交叉。
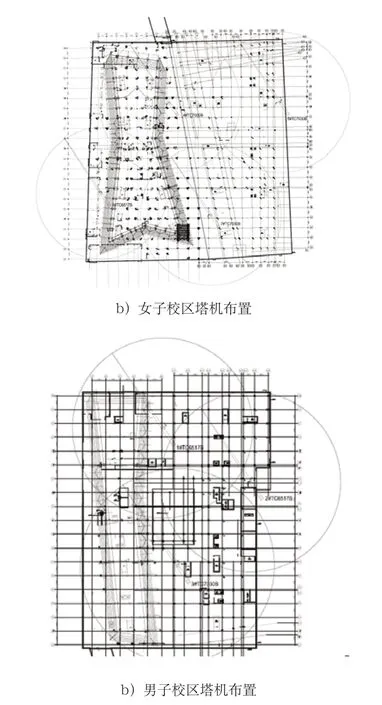
图1 男子、女子校区塔机布置图
由于塔机存在区域交叉作业,导致作业过程中存在着极大的安全隐患。需要对交叉作业频率、作业报警、人为操作等影响因素进行综合考虑,分别从塔机高度设计、防撞系统应用、交叉作业运行措施等几个方面制定相应措施。
2 塔机高度设计
2.1 塔机技术参数
该项目中涉及TC6517B-10E、TC7030B-12两种型号的塔机,两塔机在群塔作业中存在高度和幅度的影响,具体如表1 所示。
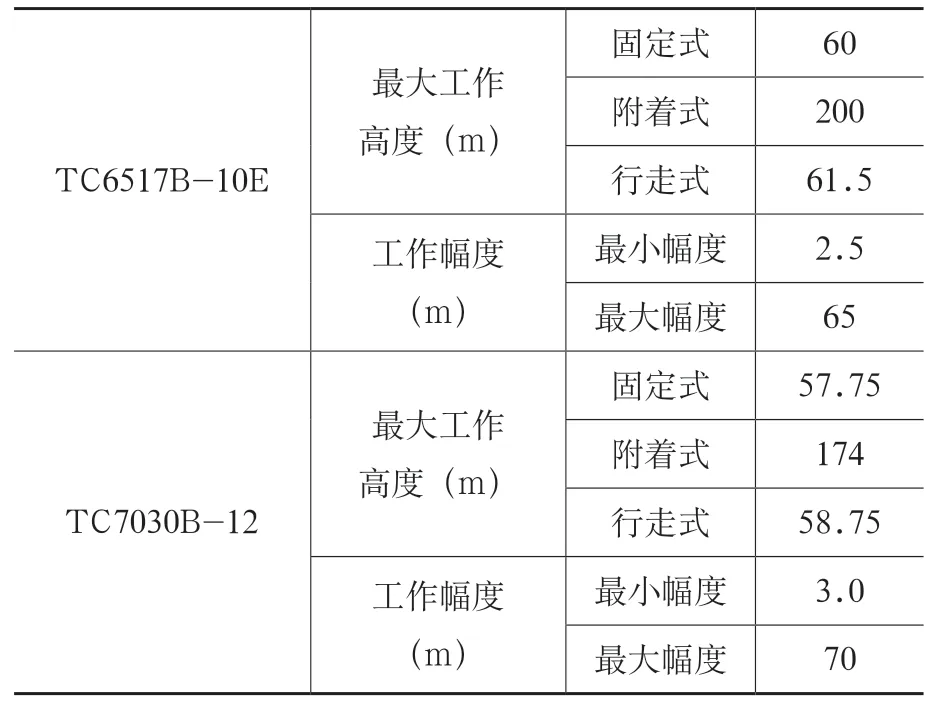
表1 TC6517B-10E、TC7030B-12塔机参数
2.2 基础数据
2.2.1 塔机安装高度
塔机安装高度如表2 所示。

表2 塔机安装高度
2.2.2 独立式整机塔机尺寸
1)塔机独立工作高度 TC6517B-10E 型塔机:60m;TC7030B-12 型塔机:57.75m。
2)起重臂顶部至塔身中心距离 TC6517B-10E 型塔机:66.75m;TC7030B-12 型塔机:72.092m。
3)标准节高度 TC6517B-10E 型塔机:3.0m;TC7030B-12 型塔机:3.75m。
4)起重臂高度 TC6517B-10E 型塔机:1.2m;TC7030B-12 型塔机:1.4m。
2.2.3 安全高度
根据《塔式起重机安全规程》(GB5144-2006),处于高位塔机的最低位置的部件(吊钩升至最高点或平衡重的最低部位)与低位塔机中处于最高位置部件之间的垂直距离不应小于2m。
2.3 塔机安全高差计算
塔机之间距离如表3 所示。
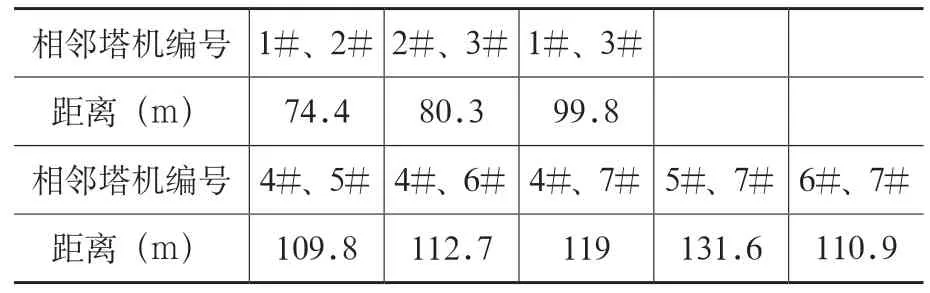
表3 塔机之间距离
其 中,1#、2#、6# 为TC6517B-10E 型塔机,3#、4#、5#、7#为TC7030B-12 型塔机。5#与6#塔机工作范围不存在交叉区域。将塔机简化为线性模型进行计算相邻塔机起重臂顶端至另一塔机起重臂拉杆交界点到该起重臂上部垂直距离如表4 所示。

表4 垂直距离
由于每台塔机安装了塔灯和幅度标识牌,为了避免低位塔机的起重臂碰触高位塔机的起升钢丝绳,取塔臂全幅钢丝绳垂度为4m,经计算,起升钢丝绳安全高度见表5。

表5 起升钢丝绳安全高度
相邻塔臂间高差必须同时满足以上两个高度才能保证塔机无碰撞交叉运行,由于线性计算中未考虑起重臂高度,所以塔机理想安全高差还应包含起重臂高度,即:理想安全高差=max(交点垂直高度,钢丝绳安全高度)+低位塔机起重臂高度,结果如表6 所示。
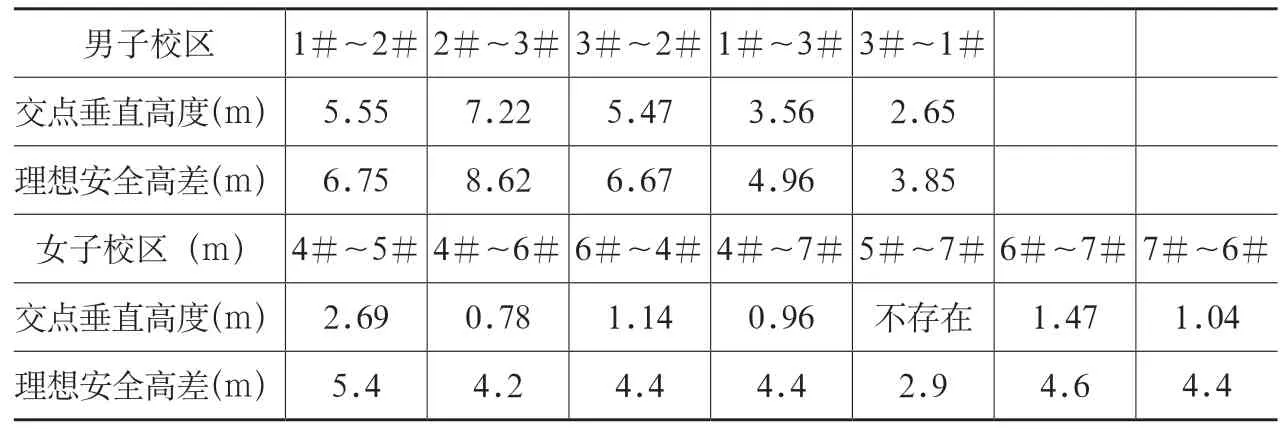
表6 理想安全高差
所以,塔机在最终顶升完毕时,应满足以上理想安全高差。如果塔机的最终起升高度大于独立式塔机起升高度,还应给该塔机增加附着装置。
2.4 独立式塔机配置及高度
根据现有塔机配置,TC6517B-10E 型塔机安装14 节标准节,高度约为53.1m,TC7030B-12型塔机安装14 节标准节,高度约为60.55m。满足塔机最小安装高度的初始塔机配置,以及在满足了塔机理想安全高差之后的塔机安装配置如表7 所示。
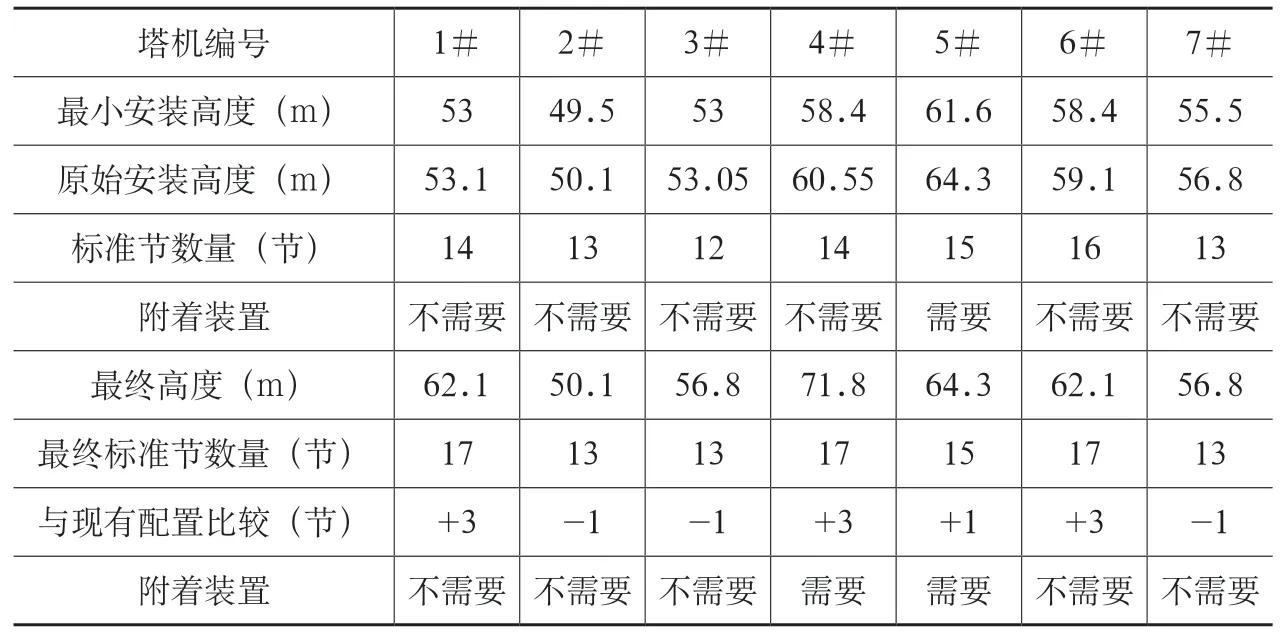
表7 塔机安装配置
由此可见,为避免塔机间交叉作业碰撞,必要增加一定的高度来达到错位运行。如上表所示,需要增加6517 标准节5 节,7030 标准节2 节,7030 附着装置2 套。虽增加了一定的设备配置成本,却能更有效地保证塔机连续交叉作业运行,减少了停机等待时间。
2.5 计算方案修正
1)4#塔机是为满足安全高差而新增了3 节标准节和附着装置,可以维持原始安装高度,对4#塔机进行区域限制性运行,以减少设备增加配置。
2)5#塔机最小安装高度与独立标准高度相差1.05m,可根据实际施工情况,取消新增1节,同时取消附着装置,从而降低设备成本。
3 防撞系统应用实例
在确保安全安装高度的同时,应该综合考虑安装防撞系统,在施工中为每台塔机安装了RJ-101/102 系列塔机安全监测仪,并在机电办公室安装了RJ-103 型塔机控制器,对区域内的塔机安全监测仪进行集中控制和管理,并进行通信控制。RJ-103 型塔机控制器是塔机安全监测仪研制的塔机防碰撞网络控制、参数设置、数据记录、塔机状态图形显示装置。通过系统可对32 台以内的塔机进行防碰撞控制,便于管理人员对塔机安全进行管理。
在防撞系统的应用上,结合RJ-103 安全检测仪,完成以下4 点监控。
1)塔机防碰撞网络控制 对区域内的塔机安全监测仪进行集中控制和管理,并进行通信控制,包括对塔臂之间碰撞、塔臂与塔身碰撞、塔臂与钢丝绳碰撞等碰撞报警的监控。
2)塔机状态显示 对网络内的塔机进行状态显示,显示幅度、位移、高度、预警、报警等各种状态,并通过声光进行报警提示。
3)参数远程设置 对远端塔机安全监测仪进行参数远程配置和设置,更加方便用户灵活使用。
4)运行过程记录 可实时记录塔机的各种运行状态,可以通过回放调取记录的各种数据。
4 交叉作业安全措施
除了理论的高度设计及安装防撞系统外,采用严格的运行制度也是防范事故发生的有效手段。比如以下几方面。
1)施工现场必须备有充分的照明设备。每台塔机必须在前臂端、后臂端和塔顶安装红色警示灯。
2)塔机司机与信号人员必须经过专业培训,并在最近3 年内从事过相关工作,无安全事故发生;信号和起重人员必须佩戴好安全防护用品。
3)塔机司机和信号、起重人员必须熟悉自己的岗位职责。严格按照《塔式起重机安全技术操作规程》和《塔式起重机操作作业指导书》进行操作,做好日常检查。运行指挥人员有权制止违规违章操作。
4)塔机修理工必须严格按照《塔式起重机维修保养制度》进行定期检查保养和故障维修,电工应每天对塔机电气装置及各种行程限位开关等保护装置和防碰撞系统进行检查,确保齐全完备,灵敏可靠,认真做好塔机检查维修记录。
5)塔机管理人员必须严格落实周检、月检制度,运行过程中存在的各类问题和隐患应及时报告并做好记录,并合理安排维修保养,确保塔机经常性处于完好状态。
6)应在交叉作业区域内设监护信号工,负责交叉作业塔机的安全运转,监督各塔机信号工的动作指令,发现指挥错误或存在碰撞隐患时及时向信号工和塔机司机发出停止信号。
7)必须遵守“十不吊”等有关安全技术规定,与正在进行施工的塔机、泵车或汽车起重机存在交叉作业时,必须服从统一协调,严格避让,不得穿插作业区域运行。
8)项目部各塔机应分设不同频道,避免指挥信号相互干扰。各塔机对讲机固定频道,特殊情况信号工之间及时沟通,协调塔机运行。
9)塔机司机、信号工要相对固定,无特殊情况不得随意更换。
10)根据施工计划合理安排各塔机每天的施工区域,尽量在交叉范围内只有1 台塔机工作,其它塔机因施工需要进入该区域,提前进行通报。
11)与周围工地可能存在交叉作业时,应提前进行有效沟通,制定切实可行的安全措施,并在运行期间派出专人进行运行监控。
5 结语
通过从塔机高度配置、防撞系统应用、交叉作业运行措施等几方面对科威特大学城项目中群塔交叉作业采取的安全防护措施,有效保证了群塔的安全运行,在项目施工期间无安全事故发生。通过对以上安全措施的总结,可以更好地为群塔交叉作业提供安全管理和安全生产经验,为同类型的项目施工提供一定的借鉴思路。