城市客车低速碰撞缓解系统设计
2021-11-26黄文青陈凌珊
黄文青,陈凌珊
(201620 上海市 上海工程技术大学 机械与汽车工程学院)
0 引言
研究表明,驾驶员的不当操作会导致90%以上的交通事故[1]。为了进一步提升道路交通安全状况,减少因驾驶员误操作而造成的交通事故,先进驾驶辅助系统(Advanced Driving Assistance System,ADAS)正得到越来越广泛的应用[2]。ADAS 通过各类传感器感知周围环境信息,并在紧急工况下向驾驶员发出警示,或者主动介入车辆控制,达到提升车辆主动安全性能的目的[3]。
对于城市客车来说,具有代表性的ADAS是自动紧急制动系统(Autonomous Emergency Braking,AEB)。AEB 能够识别车辆前方的碰撞危险,并警示驾驶员采取相应措施,必要时可自主采取制动手段减轻或者避免碰撞[4]。2014 年,欧洲新车碰撞中心(E-NCAP)将AEB 纳入汽车安全等级评价体系[5]。JT/T 1094-2016《营运客车安全技术条件》也要求我国9 m 以上营运客车应装备AEB 系统[6]。在此背景下,本文设计了一种城市客车低速碰撞缓解系统。它除了具有AEB的功能外,还有车道偏离预警的功能,能够更好地提升客车在城市工况下的主动安全性能。
1 系统功能设计
城市客车低速碰撞缓解系统主要由传感器、控制系统、执行器、被控对象4 部分组成,如图1 所示。
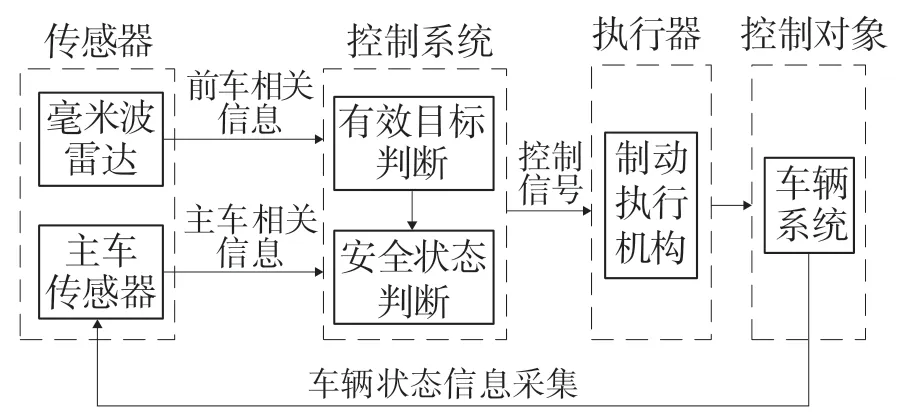
图1 系统原理图Fig.1 System schematic diagram
其中,控制系统主要进行有效目标和安全状态的判断。其主要部件为图像传感器、77 G Hz 毫米波雷达、传感器融合主机、GPS 天线、陀螺仪、显示屏以及各类连接线。该系统能够实现前向碰撞预警、低速碰撞缓解和车道偏离预警等功能,也能够进行总线通讯与故障诊断。
1.1 前向碰撞预警
此功能由车身前方安装的77 GHz 毫米波雷达与挡风玻璃安装的图像传感器的数据进行融合,通过算法实时监测前方障碍物的位置、距离和相对速度。当计算到前方行驶路线上有障碍物并且可能发生碰撞时,及时通过声光报警提醒驾驶员注意。前方行驶路线上的障碍物包括目前现有的障碍物或可能移动到行驶路线上的障碍物,可能发生碰撞的依据通常是预碰撞时间与该车辆目前最大刹车距离相关的一个综合系数,系统借助传感器融合得出的真实目标信息与车辆监控系统采集的车辆状态信息进行决策,输出控制信号并及时发出声光报警提醒驾驶员,如图2 所示。在常规的碰撞预警系统基础上,该系统对于横向快速移动的障碍物具备非常强大的追踪能力,例如电瓶车、奔跑的行人等,为驾驶员及行人提供更全面的安全保障。报警阶段,视频和必要的总线数据会被存储在本地以及远程服务器,以供监控和取证使用。
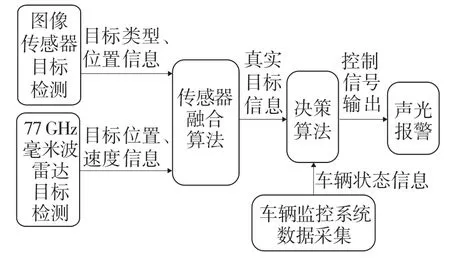
图2 前向碰撞预警功能设计Fig.2 Design of forward collision warning function
1.2 低速碰撞缓解
在实现前向碰撞预警的基础上,传感器融合主机通过向 EBS、其他同类的 ECU(例如ESC、ABS)或者通过控制加装的继动阀请求减速度控制,通过发动机、变速箱、减速器、排气制动和其他制动手段综合控制,实现减速,以达到碰撞缓解的目的,如图3 所示。在制动的过程中,同样会有声光报警提示;对于加装方向盘震动电机的车辆,会有方向盘震动提示。制动阶段,视频和必要的总线数据记录会被存储在本地及远程服务器,以供监控和取证使用。

图3 低速碰撞缓解功能设计Fig.3 Design of low-speed collision mitigation function
1.3 车道偏离预警
此功能是由安装在挡风玻璃上的图像传感器实现的。图像传感器实时监测行驶的前方道路,当检测范围内有车道线或者路缘,并且监测到车辆行驶趋势偏离现有的车道,会发出声光报警提示,提示驾驶员车辆即将偏离本车道,如图4 所示。判断发生车道偏离的依据是图像传感器监测前方车道线的变化,当车轮外侧距离车道线的距离小于0.15 m 或者有偏离车道线的趋势,系统将自动进行计算并及时发出声光报警信号。
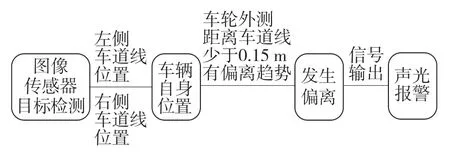
图4 车道偏离预警功能设计Fig.4 Design of lane departure warning function
2 系统硬件架构
一般的驾驶辅助系统主要包含感知、控制和决策3 部分,所以系统的硬件架构也要充分考虑这3 部分的功能要求,如图5 所示。
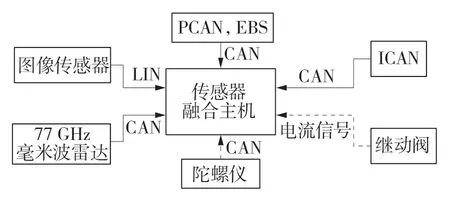
图5 系统硬件架构Fig.5 System hardware architecture
感知部分主要是图像传感器、77 GHz 毫米波雷达和陀螺仪(可选装)。其中,图像传感器与主机之间的通信方式为19 200 b/s的LIN通信,能够实现识别目标类型、位置信息的功能;雷达与主机之间的通信方式为500 kb/s 的CAN 通信,能够实现探测目标位置、速度信息的功能;陀螺仪与主机之间的通信方式为250 kb/s 的CAN 通信,能够实现获取车辆的角度等信息的功能。
控制部分主要是传感器融合主机,它主要是利用一定的传感器融合算法自动分析、综合图像传感器、77 GHz 毫米波雷达等车载传感器检测到的目标信息,并进行信息处理从而得到真实目标信息,以便完成所需要的决策和估计。
决策部分主要是PCAN,ICAN,EBS,它们与主机之间的通信方式为250 kb/s 的CAN 通信,能够实现获取整车状态的相关数据和控制EBS 执行决策的功能。
3 系统软件架构
城市客车低速碰撞缓解系统的软件架构自上而下依次为应用层、内核层和寄存器层,如图6所示。
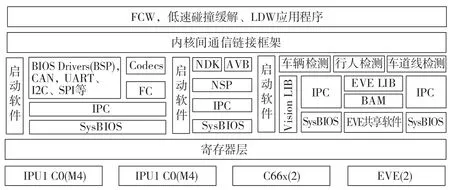
图6 系统软件架构Fig.6 System software architecture
应用层主要是FCW、低速碰撞缓解、LDW三个功能的应用程序,是面向用户的。用户可以通过MATLAB/Siumulink 搭建三部分功能的控制策略模型,然后进行报文解析,输出警示和制动信号到执行器以完成相应操作;同时,如果对模型进行了参数关联等配置后,还可以生成相应的嵌入式代码和标定文件。
内核层中,BIOS 是一个可拓展的实时操作系统,提供线程、信号量、中断等特性,连接之间的队列和消息传递使用BIOS 信号量实现。进程间通信IPC 是用于处理器之间通信的软件API,能够提供功能、多处理器堆、多处理器链表(ListMP)、消息队列和通知等。BIOS 和IPC利用的处理器应用有IPU1 C0(M4)、IPU1 C0(M4)、DSP(C66X)和EVE。BSP Drivers 是基于FVID2 接口控制和适配VIP/VPE/DSS/ISS 硬件的视频驱动程序(如VIP 捕获、DSS 显示、ISS捕获、ISS 处理、VPE 缩放等)和串行驱动程序(如I2C,SPI,UART 板特定的驱动程序和传感器驱动程序等)。网络协议层的软件包有NSP,NDK,AVB。Vision LIB 是为DSP 优化的视觉算法内核;EVE LIB 是为EVE 优化的视觉算法内核,其中包括用于EVE 算法执行的框架。
该系统通过对图像传感器和77 GHz 毫米波雷达等载传感器的数据结果进行处理得到目标的真实信息,然后根据各个功能的控制策略给出不同的信号到执行器完成制动操作,其主程序流程如图7 所示。

图7 系统主程序流程图Fig.7 System main programme flow chart
4 系统控制策略
城市客车低速碰撞缓解系统控制策略的设计主要是基于TTC 来控制预警和制动等操作的实施,同时使相关状态信息出现在显示屏上。
4.1 前向碰撞预警控制策略
前向碰撞预警检测目标主要有车辆和行人两类,预警级别分为一级和二级预警(其中,一级为低等级,二级为高等级)。在默认状态下,显示屏上的警示图标不亮,也没有声音报警信息。
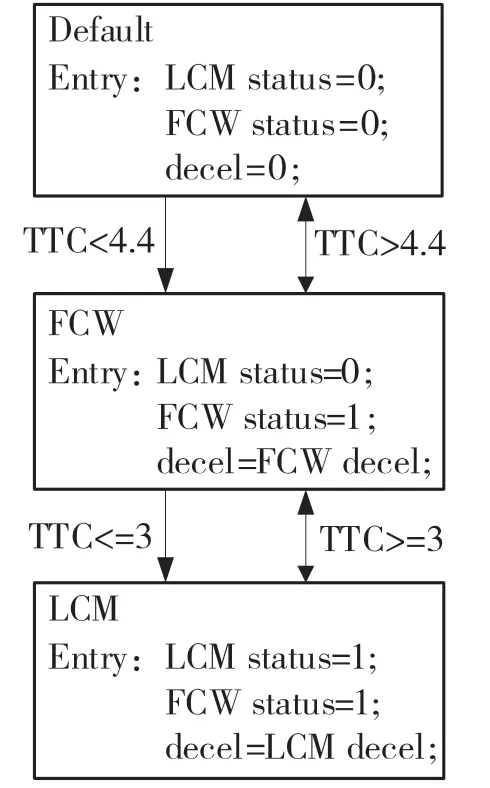
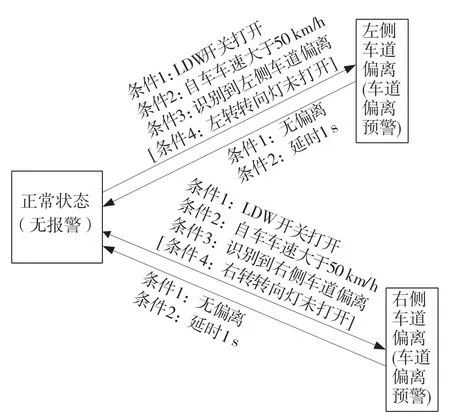
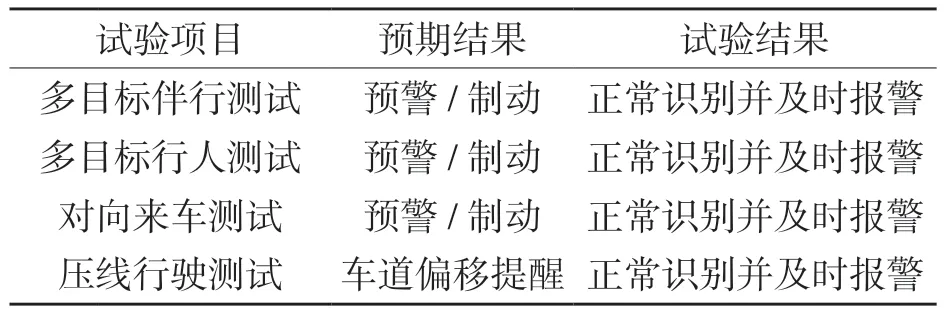
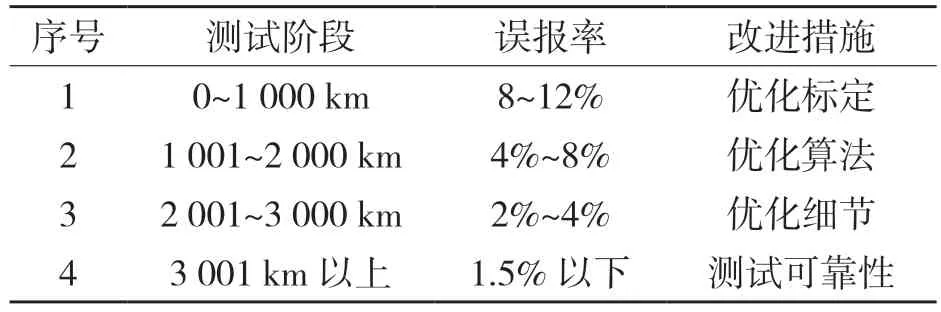
当TTC 处于预警阈值范围内时,系统进行目标类别判断,区分行人和车辆后进行预警(显示屏上图标和声音报警)。本系统的前向碰撞预警中,预警阈值范围为2.8 s 前向碰撞预警的控制策略如图8 所示。其中,ICON 表示显示屏的警示图标状态,VOICE 表示声音预警的状态,car 指车辆,pde 指行人。 图8 FCW 控制策略Fig.8 FCW control strategy 运行车速方面,低速碰撞缓解在10 km/h 以下的车速下不响应预警、制动,在10 km/h 以上的车速下正常运行。在默认状态下,前向碰撞预警不触发,低速碰撞缓解不触发,车辆保持原来的运动状态不减速。 如图9 所示,当TTC<4.4 s 时,系统进入前向碰撞预警状态,提示驾驶员采取制动措施使车辆减速,但尚未触发低速碰撞缓解;如果驾驶员未能及时采取相应措施使得TTC ≤3 s,则在前向碰撞预警的基础上,系统进入低速碰撞缓解状态,此时系统自动执行相应决策使得车辆制动减速;当车速下降使得TTC>3 s 时,系统返回上一层的预警状态;进一步下降使得TTC>4.4 s 时,系统返回默认状态。 图9 低速碰撞缓解控制策略Fig.9 Low-speed collision mitigation control strategy 车载通信方面,低速碰撞缓解需要能从车内通信网络提取所需的信息,车内通信网络提供的信息至少包括车速信息、制动和转向灯等。 需要说明的是,低速碰撞缓解的报警阶段形式与FCW 的报警方式一致,所以在整个城市客车碰撞缓解系统中,FCW 不单独工作,而是与低速碰撞缓解相关联的。此外,为了保障乘客安全,制动减速度应在1~2.5 m/s2之间 当车辆沿着车道线正常行驶未发生偏离,以及图像传感器检测范围内无车道线或者路缘时,车道偏离预警不会触发。 在LDW 打开的情况下,如果车速大于某一阈值(系统默认设为50 km/h,可修改),且图像传感器识别到车辆行驶方向正在偏离车道或者有偏离趋势时,车道偏离预警触发,显示屏上高亮显示报警图标,并有声音报警。当驾驶员接收到报警信息并采取相关措施调整车辆运行轨迹后,经1 s 延时系统回到正常状态,如图10 所示。左、右侧车道偏离均会触发报警。 图10 车道偏离预警控制策略Fig.10 Lane departure warning control strategy 需要说明的是,条件1,2,3 均满足时,车道偏离预警才会触发,条件4 为可选项。同理,条件1、2 均满足时,系统才能返回正常状态。 此外,在图像传感器只检测到单侧车道线时,系统将自动补充另一侧虚拟车道线。在光线较强、较弱的情况下,系统也会自动调节图像的白平衡和对比度,提升强、弱光环境下的目标识别能力。 以某型城市客车作为试验车辆,在城市环境中广泛选择车道线和交通情况不同的测试路线。测试过程中,试验车辆按正常速度行驶,验证系统在城市工况下正常运转情况。 普通城市道路出现常见的实际道路情况时,记录系统的触发条件测试、多目标伴行测试、多目标行人测试、对向来车测试、压线行驶测试的结果,如表1 所示。 表1 系统测试结果Tab.1 System test results (续表) 为了测试系统的误报率,选取5 000 km 测试距离,分析相关测试数据,误报率见表2。 表2 系统误报率Tab.2 System false alarm rate 本文设计的城市客车低速碰撞缓解系统能够辅助驾驶员控制车距,减少因注意力分散或制动不及时而导致碰撞事故,降低事故伤害和财产损失,具有良好的应用前景。针对系统的3 个主要功能,相关人员可以继续优化或者重新设计控制策略和程序代码,进一步降低系统的误报率,提升整体性能。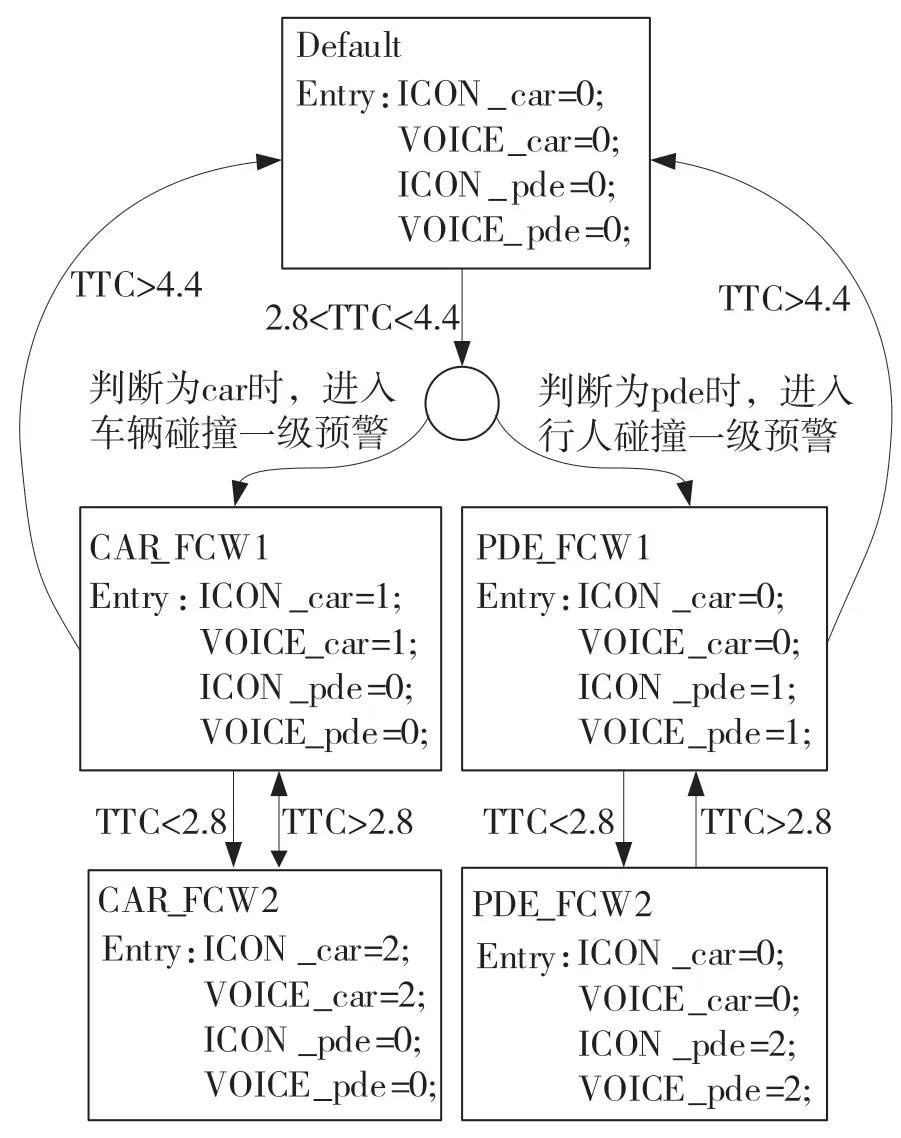
4.2 低速碰撞缓解控制策略
4.3 车道偏离预警控制策略
5 城市工况下系统功能测试

5 结语
