空间激光干涉仪激光抖动噪声抑制研究
2021-11-25王璐钰李玉琼
王璐钰,李玉琼,蔡 榕
(1.中国科学院 空天信息创新研究院,北京 100094;2.中国科学院大学 航空宇航学院,北京 101408;3.中国科学院 力学研究所,北京 100190)
1 引言
空间引力波探测“太极计划”的测量频段为0.1 mHz~1 Hz,敏感频段为10 mHz,主要探测中等、大质量双黑洞的合并、碰撞等天体事件[1-8]。“太极计划”中,3颗卫星发射到绕日轨道后,星组之间需要经过星敏感器初指向、电荷耦合器粗指向以及四象限光电探测器(Quadrant Photo Detector,QPD)精密指向调控这3个阶段以完成激光链路的构建,从而实现科学数据采集[6-10]。卫星间的信号传输将采用激光外差干涉测距法来实现,当引力波经过时,会引起干涉仪臂长的变化,从而使得干涉条纹随之变化,通过相位计测得拍频信号相位变化可得出测试质量之间距离的变化情况,进而反演引力波信号[11-15]。空间中,由于受到星际磁场、天体引力梯度等非保守力的影响,卫星会发生抖动,为抑制该抖动噪声,将采用无拖曳控制系统主动抵消空间环境扰动,但部分残余抖动噪声仍将耦合到传播激光中。此外,传播望远镜的抛光精度受到技术制约,使得传播激光存在波前畸变[6,16]。经三百万公里后,传播激光将偏离标准高斯波前,与本地激光干涉时,其激光抖动噪声将耦合并主导测量信号。因此,需抑制激光抖动噪声至10 nrad/@10 mHz以内,从而实现精密指向调控[7,17]。
关于抑制激光抖动噪声的方法,国内外已取得的研究结果有:理论方面,GERALD H构建了高斯光束-高斯光束干涉时的差分波前敏感测角解析模型[18];Sheard求解了平顶光束-高斯光束干涉的差分波前敏感测角技术相角转化近似公式[19];本研究团队成员董玉辉完成了差分波前敏感测角技术的原理性验证[6,20]。实验方面,HEINZEL G利用迈克尔逊干涉仪设计实验,在0.1 Hz~100 Hz的高频段内,将激光抖动噪声抑制到了10 nrad/[21];董玉辉利用基于差分波前敏感测角技术的马赫-曾德干涉仪,实现了20 nrad/@10 mHz的激光抖动噪声抑制精度[6]。
相较于文献[6],本文所使用的实验系统进行了以下改进:(1)针对地面震动噪声,采用了隔离地基和气浮支柱相结合的二级减振系统,以降低系统的震动噪声,隔离地基固有频率为7.8 Hz,气浮支柱本征共振频率为1 Hz;(2)针对温度涨落噪声,采用具备温度调节和恒温功能的净化系统(温度涨落 ≤ 1 ℃、净化等级 ≤ 1000级)以及高真空系统,其静态工作真空度可稳定在0.5 Pa左右;(3)采用全金属密封的真空系统以降低实验系统的电磁噪声;(4)激光器的频率稳定性由原来的1 MHz/提高到了0.5 MHz/;(5)相位计的相位测量灵敏度由原来的2π×10−5rad/ 提高到了2π×10−6rad/22-23];(6)总体而言,本实验系统中的激光干涉仪测量精度由原来的100 pm/提高到了5 pm/23]。基于以上实验条件,本文搭建了地基激光抖动噪声抑制系统,采用差分波前敏感测角技术对传播激光和本地激光之间的夹角θ(θ≤ 10−4rad)进行高精度测量,利用比例-积分-微分(Proportional-Integral-Derivative,PID)控制系统对该偏角θ进行校正,以使得两激光束传播方向一致,从而产生稳定的干涉信号,实现将激光抖动噪声抑制到10 nrad/@10 mHz以内的指标要求(实验中对激光抖动噪声的抑制包含了激光束自身抖动以及所使用光学元器件(比如光纤耦合器)可能带来的扰动信息),为“太极计划”激光干涉测量奠定了一定的物理实验基础。
2 差分波前敏感测角技术
图1为差分波前敏感测角技术原理图,携带抖动信号(以倾斜角度θ传播)的远端传播激光与沿平行方向传播的本地激光发生干涉后,四象限光电探测器测得相应的相位信号,并由相位计读出该信号。
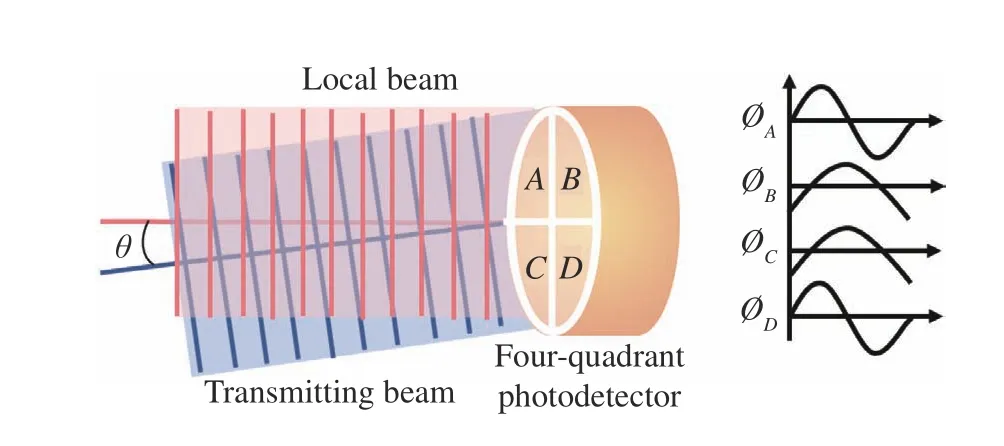
图1 差分波前敏感测角技术原理图Fig.1 Schematic diagram of differential wavefront sensitive angle measurement technology
实验中所使用的相位计输出信号为相位相对值,即:ФB−ФA、ФC−ФA、ФD−ФA,由此结合差分波前敏感测角技术可知,四象限光电探测器垂直方向和水平方向的相位差分别为:

当干涉信号全部被四象限光电探测器光敏面接收时,探测器测得的垂直或水平方向的相位差(统一记为ΔФ)与传播激光的倾斜角度θ存在以下关系[19]:
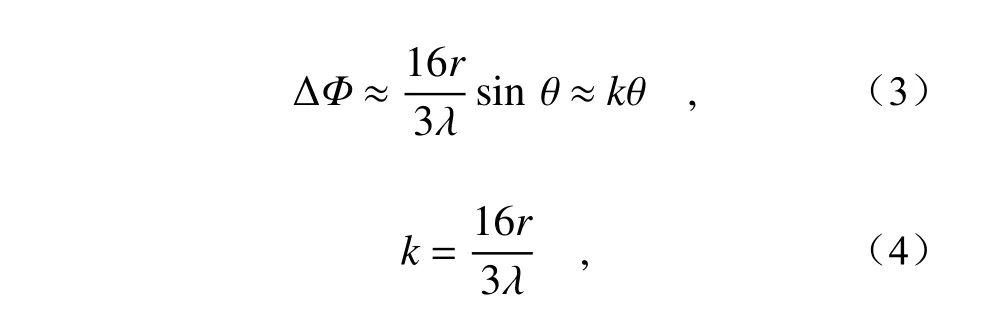
其中,r为四象限光电探测器光敏面半径,λ为激光波长,k为垂直或水平方向的相角转化因子。实验中r= 1 mm,λ= 1064 nm,由此计算可得理论上k= 5012 rad/rad。
3 实验系统搭建
图2为激光抖动噪声抑制系统,其中,图2(a)为激光调制光路,图2(b)为真空腔内超稳平台上的激光干涉光路,图2(c)为总体光路布局。激光调制光路中,由波长为1064 nm的单纵模窄线宽激光器出射的激光被5∶5偏振分光镜分为两束平行光,如图2(a)(彩图见期刊电子版)所示,其中,红色光线代表本地激光,蓝色光线代表远端传播激光。两束光线依次经过声光调制器、楔形片、光阑、线性偏振片、中性密度滤波片后,被调制为频率差为40 kHz(实验研究表明,该系统中两路激光束频率差为40 kHz时,系统读出噪声最小[6])的仅含一级Bragg衍射光的S态平行光束,再经光纤耦合器传输到真空腔内的超稳平台上。干涉光路(图2(b))中,本地激光(经PI快速偏摆镜反射)与远端传播激光(经模拟抖动信号的偏摆镜反射)发生干涉效应后被四象限光电探测器接收,之后经相位计检测并由计算机输出显示该相位数据。图2(b)和2(c)(彩图见期刊电子版)中,粉红色光线表示:(1)反馈控制环内,干涉信号被QPD1接收,经数字相位计、个人电脑、PID控制器对本地激光传播方向进行反馈控制,使得本地激光传播方向平行于远端传播激光,以抑制激光抖动噪声。因为在该反馈控制过程中,系统将激光抖动噪声和系统读出噪声均作为被控对象进行了反馈控制,因此此时测得的噪声水平代表整个反馈控制系统的噪声水平;(2)反馈控制环外,干涉信号被QPD2接收后,经过数字相位计,由电脑记录测得PID反馈控制系统抑制抖动噪声后的数据,此时测得的噪声水平代表实际激光抖动噪声抑制水平。
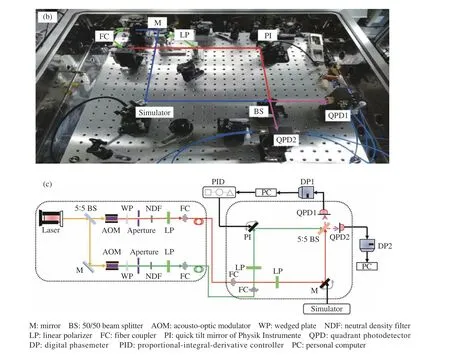
图2 激光抖动噪声抑制系统。(a)激光调制光路;(b)干涉光路;(c)总体光路Fig.2 Laser jitter noise suppression system.(a) Laser modulation optical path; (b) interference optical path; (c) overall optical path

4 实验结果与分析
为避免环境噪声对实验研究的影响,本文的所有实验均选择在环境扰动少、温度涨落基本稳定的条件下进行的,通过模拟空间中比较安静稳定的实验环境,进而通过地面物理实验验证“太极计划”空间激光抖动噪声抑制精度的可实现性。为此,文中主要研究了垂直、水平两个典型方向上的激光抖动噪声抑制水平;同时,为保证测量结果的准确性,应使得入射到四象限光电探测器上的光斑大小为探测器光敏面面积=n:1 (n≥1)。
4.1 串扰性测试
在激光抖动噪声抑制系统的调控中,PI快速偏摆镜垂直方向和水平方向之间是否存在串扰将影响抖动噪声的抑制精度。因此,本文测试了PI快速偏摆镜的垂直、水平两方向之间的串扰情况:固定PI快速偏摆镜垂直方向位于0 μrad处,控制其水平方向以振幅为300 μrad、频率为10 mHz作正弦运动,测量PI快速偏摆镜水平方向运动对垂直方向的扰动情况,实验结果如图3(a)所示,同理测得PI快速偏摆镜垂直方向运动时对水平方向的扰动情况,实验结果如图3(b)所示。
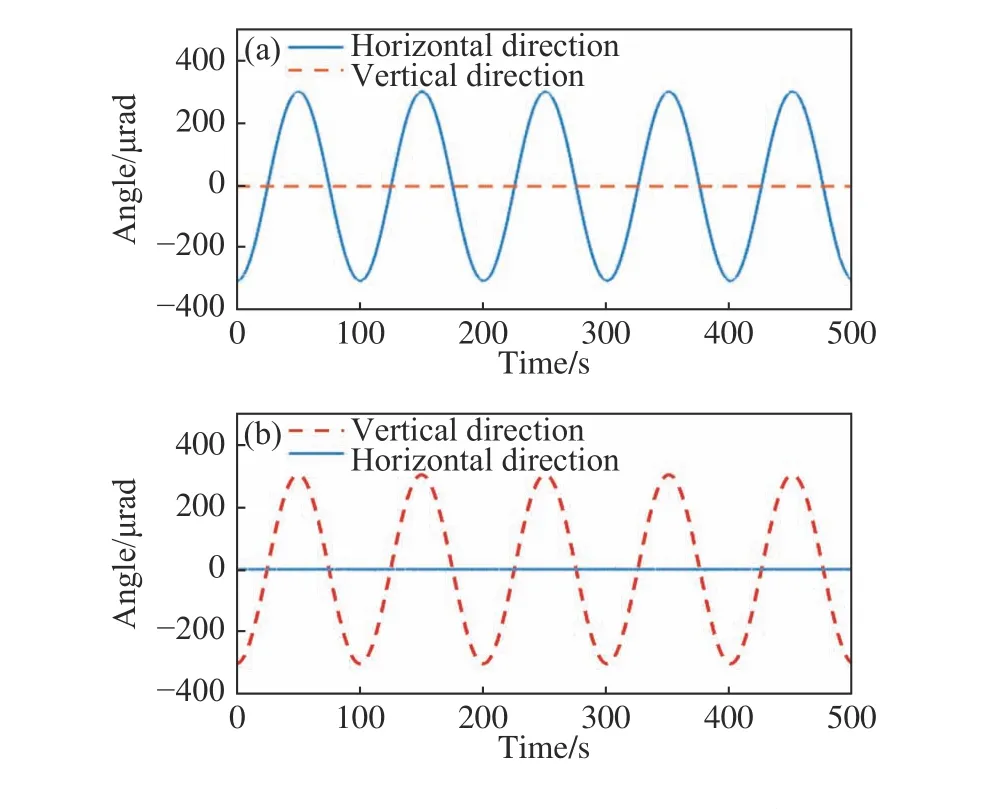
图3 串扰测试结果。(a)水平方向运动对垂直方向的串扰;(b)垂直方向运动对水平方向的串扰Fig.3 Crosstalk test results.(a) Crosstalk of horizontal movement to vertical direction; (b) crosstalk of vertical movement to horizontal direction
由图3可知,PI快速偏摆镜的垂直方向和水平方向之间的运动互不干扰,即不存在串扰现象,因此,两方向可单独进行测试。
4.2 确定相角转化因子
基于4.1节得出的结论,下面分别对探测器的垂直、水平方向相角转化因子ky、kx进行测试:固定一个方向在0 μrad位置处,程序控制PI快速偏摆镜另一方向以3 μrad为间隔,从−150 μrad到150 μrad运动,并记录偏转角度与相位误差之间的关系,数据处理结果如图4所示。由此可知ky= 6700 rad/rad(拟合不确定度为2.745×10−5),kx= 5000 rad/rad(拟合不确定度为5.6185×10−6)。测得ky、kx与理论值差异较大的主要原因是:(1)激光的有效干涉区域与干涉强度的非对称性[6];(2)干涉光斑分布的不均匀性;(3)四象限光电限探测器理想情况(理论上,四象限光电限探测器是由4个性能完全相同的光电二极管按照直角坐标要求排列而成的光电探测器件)与实际性能(各象限间光响应度、暗电流和结电容等参数不完全一致,导致探测性能不完全一致[24])存在差异。
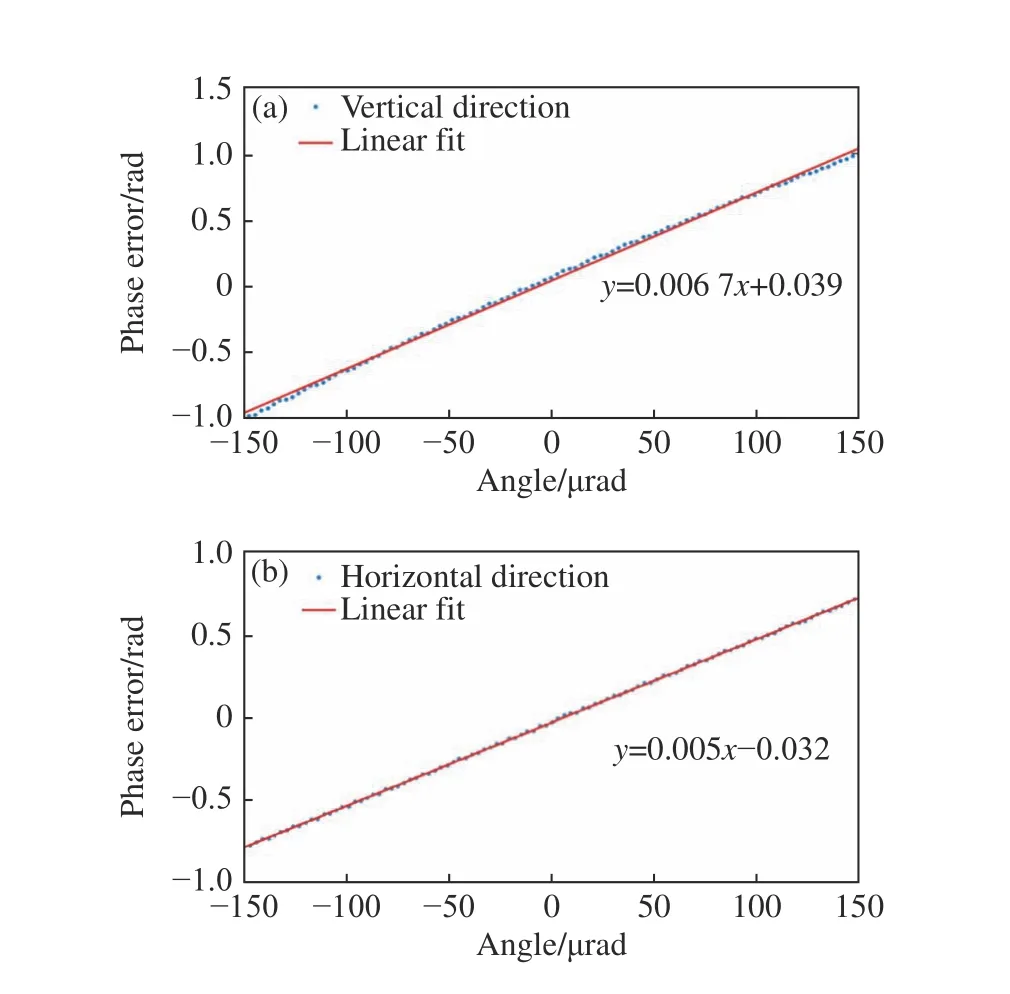
图4 相角转化因子实验结果。(a)垂直方向;(b)水平方向Fig.4 Experimental results of phase-angle conversion factor.(a) Vertical direction; (b) Horizontal direction
4.3 系统读出噪声水平
系统读出噪声指不加入抖动信号及PID控制时,系统运行本身存在的噪声,即系统运行的最佳性能,主要包括温湿度、压力梯度等残余噪声,以及四象限光电探测器后端电路、BNC转接头、射频传输线和四通道相位计所表现出的噪声。一方面,由于实验条件限制,这些噪声各自的频率尚无法确定,因此只能进行定性描述,更进一步的定量描述有待研究;另一方面,这些噪声具有恒存在性、不可补偿抑制消除和无法单独测量等特征,且在激光抖动噪声抑制实验中,主要关注这些噪声在测量过程中的综合影响,因此可通过系统读出噪声来统一表征这些噪声的大小。垂直、水平方向测得的系统读出噪声水平如图5(时域图)和图6(频域图)所示。图6中,ASD为幅度谱密度图,LASD是对ASD数据进行线性拟合的结果,可以更直观地衡量系统的噪声水平[6]。
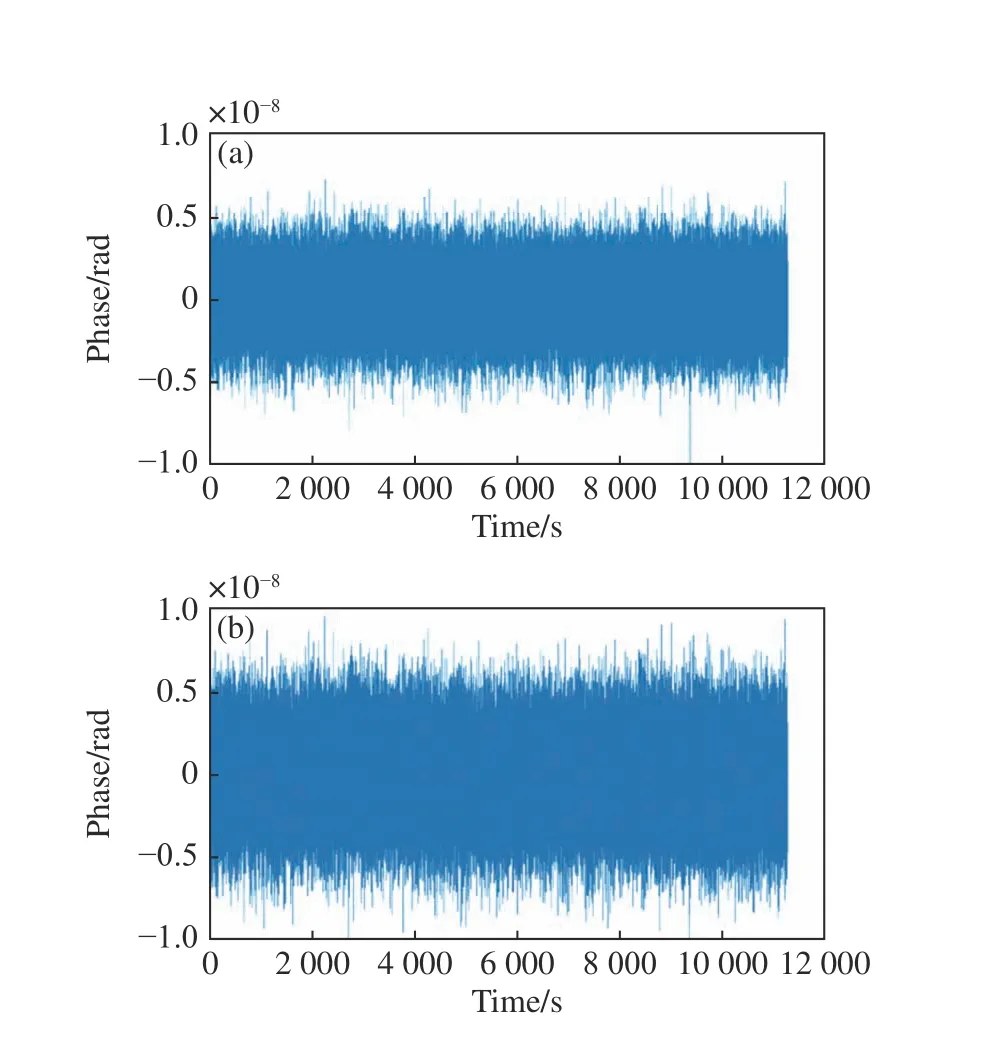
图5 系统读出噪声时域图。(a)垂直方向;(b)水平方向Fig.5 Time domain diagram of system readout noise.(a) Vertical direction; (b) horizontal direction
如图5所示,系统运行3.125 h,垂直方向、水平方向的读出噪声整体水平均较为稳定,且噪声较小,均为nrad量级。由图6可知,在1 mHz~1 Hz频率范围内,垂直、水平方向的系统读出噪声均小于1 nrad/,在0.1 mHz~1 mHz频率范围内,垂直、水平方向的系统读出噪声均小于等于4 nrad/。总体来讲,系统读出噪声较小。
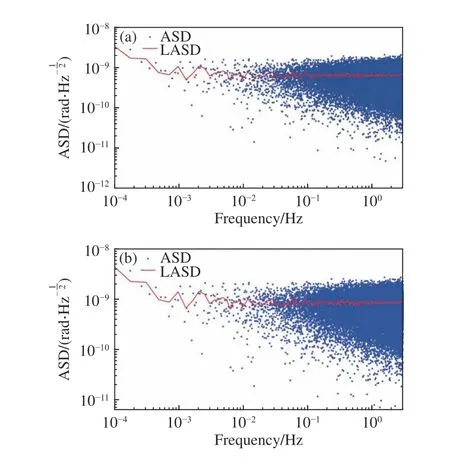
图6 系统读出噪声频域图。(a)垂直方向;(b)水平方向Fig.6 Frequency domain diagram of system readout noise.(a) Vertical direction; (b) horizontal direction
4.4 激光抖动噪声抑制水平
激光抖动噪声抑制实验中,PI偏摆镜与QPD2间的水平距离(亦即抖动信号模拟器距离QPD1间的水平距离)为20 cm,由此可知预设的抖动信号模拟器输出正弦信号的最大峰值为:arctan (1 mm/20 cm)≈ 0.005° ≈ 87 μrad(其 中,1 mm为QPD半径)。因此,为保证干涉激光位于探测器光敏面内,实验设定抖动信号为峰值50 μrad、频率10 mHz的正弦信号。
实验中,激光抖动的反馈控制带宽为20 Hz,动态范围为±50 μrad(动态范围主要受所设置的抖动信号大小、抖动信号模拟器到探测器的距离以及四象限光电探测器接收光敏面大小的限制)。经仿真实验测得该反馈控制系统的动态响应参数分别如下:调整时间为0.617 ms,超调量为4.556%,稳态误差约为零;垂直、水平方向上激光抖动噪声的抑制水平均为0.1 nrad/ @ 0.1 mHz~1 Hz。由此可知,该系统具有优良的反馈控制能力和较高的噪声抑制精度。
图7~图8(彩图见期刊电子版)中,红色虚线为加入抖动信号时的噪声水平,即系统自由运行时测得的噪声水平;蓝色实线为实际噪声水平,即激光抖动噪声抑制水平;绿色点画线为反馈控制系统噪声水平。
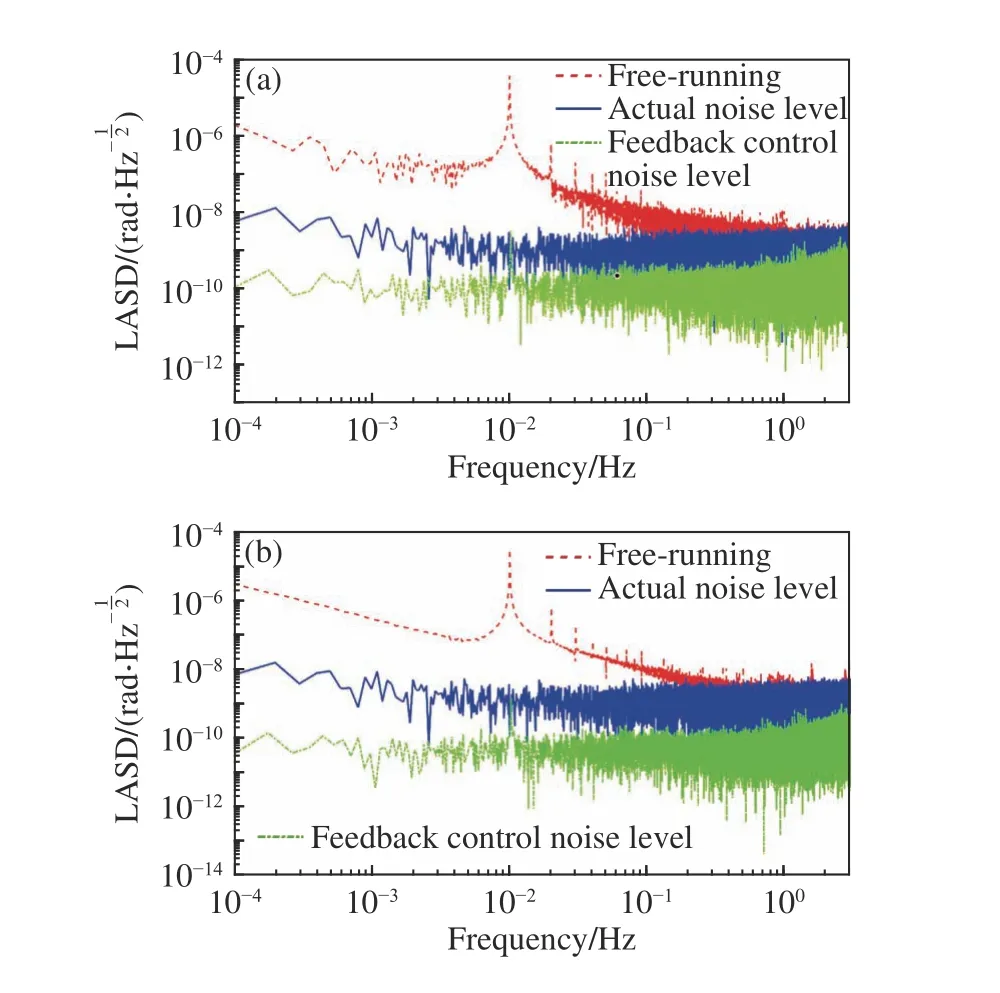
图7 激光抖动噪声抑制结果(分别加抖动)。(a)垂直方向;(b)水平方向Fig.7 Laser jitter noise suppression results (with separate jitter).(a) Vertical direction; (b) horizontal direction
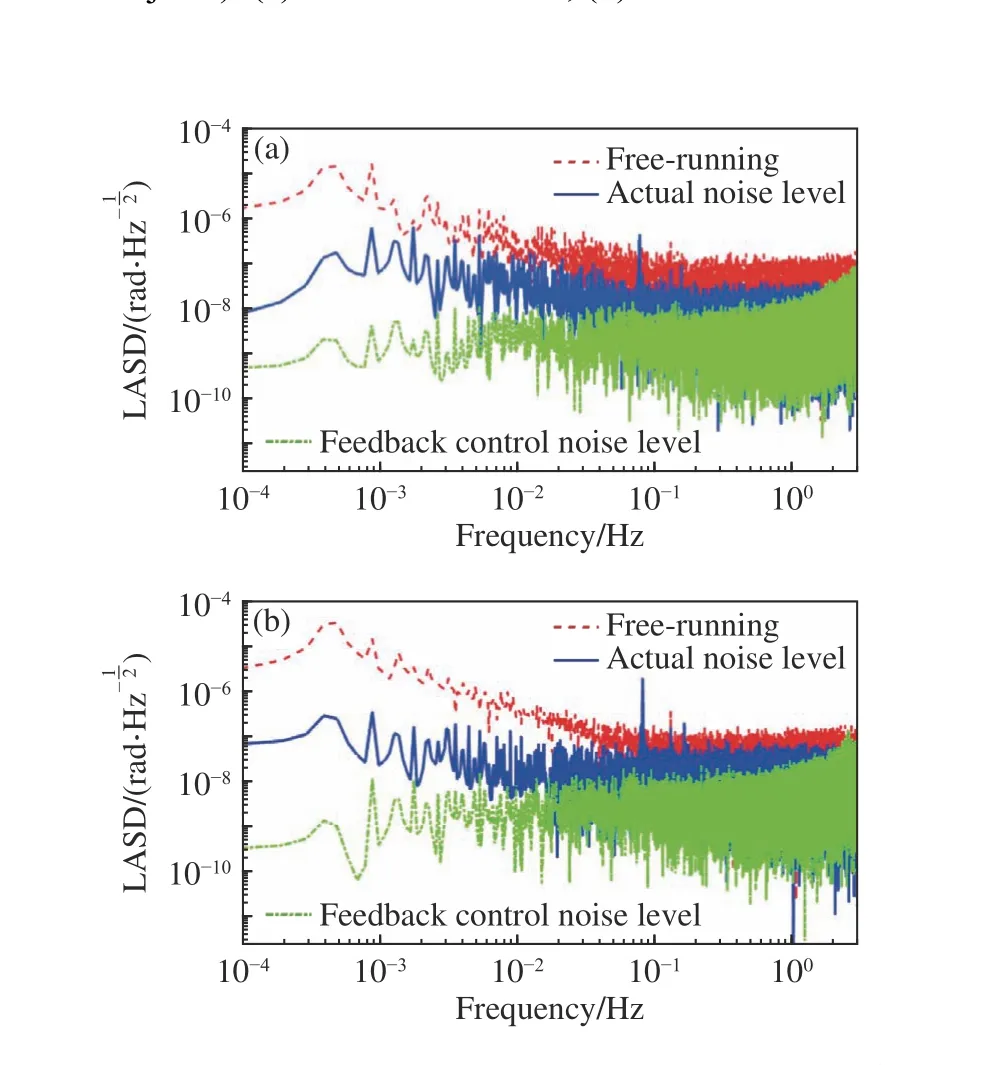
图8 激光抖动噪声抑制结果(同时加抖动)。(a)垂直方向;(b)水平方向Fig.8 Laser jitter noise suppression results (with simultaneous jitter).(a) Vertical direction; (b) horizontal direction
实验A:垂直方向和水平方向分别加入抖动,并进行控制,得到的噪声抑制结果如图7所示。由图7中10 mHz频率处3条曲线的噪声水平可知,本文所设计的反馈控制系统可将50 μrad/的噪声抑制到3 nrad/以下。由反馈控制噪声水平曲线可知,无论是垂直方向还是水平方向,在0.1 mHz~1 Hz的频率范围内,系统噪声水平稳定在0.1 nrad/左右,这表明系统具有良好的反馈控制能力。由实际噪声水平曲线可知,垂直方向上,在1 mHz~1 Hz的频率范围内,激光抖动噪声水平稳定在1 nrad/左右;在0.1 mHz~1 mHz的频率范围内,激光抖动噪声水平几乎均小于10 nrad/。水平方向上,在1 mHz~1 Hz的频率范围内,激光抖动噪声水平稳定在2 nrad/左右;在0.1 mHz~1 mHz的频率范围内,激光抖动噪声小于等于15 nrad/。该结果基本符合“太极计划”对激光抖动噪声抑制精度的要求。
图7中自由运行噪声曲线(红色曲线)上10 mHz抖动信号右侧的一系列尖峰是由该10 mHz抖动信号引起的倍频扰动信号,这一系列信号的存在是由于模拟抖动控制器性能欠佳导致的,不会对激光抖动噪声抑制的实验结果造成影响。
实验B:垂直方向和水平方向同时加入抖动噪声并进行控制,得到的实验结果如图8所示。由图8可知,垂直、水平方向同时加入抖动信号的实验结果中,检测不到明显的抖动信号峰值的相位信息(即10 mHz处无峰值),且噪声抑制效果不甚理想:由红色曲线可知,垂直、水平方向上的自由运行噪声小于1 μrad/@10 mHz;由蓝色曲线可知,垂直、水平方向上的激光抖动噪声小于等于100 nrad/@10 mHz;由绿色曲线可知,垂直、水平方向上的反馈控制系统噪声小于10 nrad/@10 mHz。
由图7和图8的实验对比结果可知,同时给垂直、水平方向加入抖动信号时,反馈控制系统对这两个方向的抖动信号进行同时调控的能力相较于某一方向上的抖动信号单独调控能力有所下降,因此同时抑制两方向上的激光抖动噪声实验结果相较于单独抑制某一方向上的结果精度水平有所下降。经分析可知,造成该结果的原因可能有:(1)硬件和软件控制方面,垂直、水平两方向同时加抖动信号时,控制器输出的是这两个方向上的合力抖动效果,而PI偏摆镜调控时,是沿着垂直或水平方向移动的,因此对合力(斜方向上的运动)进行调控时,会出现延迟效果,因而调控效果不佳;(2)实验环境方面,由于激光抖动噪声抑制对实验环境的要求较高,而实验A和实验B进行的时间不同,所处的环境因素不同,因而实验结果有所差异。针对这些现象,后期将进一步深入研究并改进实验系统,以期实现对多方向激光抖动噪声的高精度同步抑制。另外,通过对比分析物理实验和仿真实验结果可知,仿真实验结果较优是因为仿真是理想化实验且不受光斑分布影响,而物理实验会受到光斑不均匀性分布、外界环境、仪器设备实际工作性能、传输线噪声等因素的干扰,从而影响噪声抑制效果,但总的来讲,仿真实验和物理实验结果都较为合理,为激光抖动噪声抑制的研究提供了参考。
5 结论
本文针对目前已有实验结果[6]不能满足“太极计划”关于激光抖动噪声抑制精度的要求这一现状,基于差分波前敏感测角技术和PID反馈控制技术,搭建了激光抖动噪声抑制系统,利用高精度的测角技术和控制系统,实现了将激光抖动噪声抑制到10 nrad/量级的指标要求。实验结果表明:激光抖动噪声抑制系统的读出噪声小于1 nrad/@10 mHz;激光抖动噪声小于4 nrad/@10 mHz。该结果验证了差分波前敏感测角技术在nrad角度测量方面的优势以及所搭建系统优良的隔振性能、温控性能等,且该实验为“太极计划”激光干涉测量中的激光指向抖动噪声抑制方法提供了参考。