永磁同步电机模型预测电流控制比较研究*
2021-11-22苏晓杨兰志勇蔡兵兵
苏晓杨, 兰志勇, 蔡兵兵
(1.湘潭大学 自动化与电子信息学院,湖南 湘潭 411105;2.江麓机电集团有限公司,湖南 湘潭 411105)
0 引 言
具有功率密度高、可靠性好、运行效率高等优点的永磁同步电机(PMSM)广泛应用于轨道交通、航天航空、数控伺服等高性能调速系统领域[1]。PMSM应用场合对控制精度要求的提高使矢量控制与直接转矩控制逐渐难以满足需求。随着数字处理器性能的提升,结构简单、动态响应快的模型预测控制(MPC)得到了更广泛的应用[2-3]。
线性MPC称为有限控制集模型预测控制(FCS-MPC),选取电流为优化目标的FCS-MPC称为模型预测电流控制(MPCC)[4]。传统MPCC在单个采样周期只输出一种开关状态对应的电压矢量,也称为单矢量MPCC。但对于两电平逆变器的PMSM驱动系统来说,由于单矢量MPCC输出的仅为6个方向幅值固定的有效电压矢量或零矢量,在稳态运行状态下存在电流波动较大的问题。为改善其控制效果,由单矢量MPCC逐渐发展为多矢量MPCC,在单个采样周期不只发出一个电压矢量。占空比MPCC是双矢量MPCC中的一种,文献[5-7]中均采用占空比MPCC,但占空比的计算方法不同。文献[5]通过使电流矢量误差最小化的方法来确定占空比;文献[6]通过q轴电流无差拍原则计算占空比;文献[7]中构建了关于矢量作用时间的价值函数,并根据dq轴电流无差拍原则计算占空比。文献[8]采用双矢量MPCC策略,第二电压矢量可选择有效电压矢量与零矢量。文献[9-13]采用三矢量MPCC,文献[9]将相邻2个有效电压矢量与零矢量合成的虚拟电压矢量作为备选电压矢量;文献[10-11]中采用无差拍原理计算最优虚拟电压矢量,将其所在扇区边界有效电压矢量与零矢量作为输出;文献[12]根据第一最优电压矢量作用下的电流误差所在扇区确定第二最优电压矢量;文献[13]在确定第一最优电压矢量之后,与其余有效电压矢量、零矢量合成备选虚拟电压矢量。
本文针对MPCC的3种算法进行比较研究,首先介绍传统MPCC、占空比MPCC以及三矢量MPCC 3种控制策略的控制原理,并从发出矢量个数、电压矢量选择范围和矢量作用时间计算方法3个方面对3种方法进行对比分析。最后,通过仿真验证3种方法的动静态性能,仿真结果表明多矢量MPCC与传统MPCC具有相似的动态性能,但能够有效地改善传统MPCC的稳态性能,减小电流波动。
1 传统MPCC策略
1.1 PMSM数学模型
本文以表贴式PMSM为研究对象,忽略铁心饱和、涡流和磁滞损耗,且d、q轴电感相等,有Ld=Lq=Ls,其在同步旋转坐标系下的电压方程可表示为

(1)
式中:Rs为定子电阻;ωre为转子电角速度;ψf为永磁体磁链;id和iq分别为定子电流d、q轴分量;ud和uq分别为定子电压d、q轴分量。
1.2 传统MPCC原理
将式(1)离散化得到预测模型,如式(2)~式(5)所示:

(2)

(3)

(4)

(5)
式中:Ts为采样周期;ud(k)和uq(k)分别为k时刻的d、q轴电压值;ωre(k)为k时刻的转子电角速度。
两电平三相电压源逆变器(VSI)共有8种开关状态,包括6个有效电压矢量(u1~u6)和2个零矢量(u0、u7)。将8个电压矢量与当前k时刻采样得到的电流值id(k)、iq(k)依次代入预测模型式(2)预测k+1时刻的电流值id(k+1)、iq(k+1)。


(6)
因此,将id(k+1)、iq(k+1)代入价值函数式(6)计算出相应的g值,并从中选出最小的g值,最后将使g值最小的电压矢量作为最优电压矢量输出。
2 多矢量MPCC策略
2.1 虚拟矢量的合成
与传统单矢量MPCC存在较大的电流波动相比,多矢量MPCC策略最终作为电流指令输出的不再是VSI的8个基本电压矢量,而是由其合成的虚拟电压矢量,可减小电流波动。占空比MPCC在单个采样周期中,通过1个有效电压矢量和1个零矢量合成1个方向固定、幅值可调的虚拟电压矢量,如图1(a)所示;三矢量MPCC在单个采样周期中,通过2个有效电压矢量的1个零矢量合成1个方向可调、幅值可调的虚拟电压矢量,如图1(b)所示。图1中tm、tn为有效电压矢量um、un的作用时间。

图1 虚拟电压矢量合成
根据式(1)可得,零矢量uzero与有效电压矢量um、un作用时d、q轴电流变化率sdz、sqz、sdm、sqm、sdn、sqn分别为

(7)

(8)

(9)
结合式(7)~式(9),占空比MPCC与三矢量MPCC中k+1时刻的id(k+1)、iq(k+1)为
iq(k+1)=iq(k)+sqmtm+sqz(Ts-tm)
(10)

(11)
2.2 占空比MPCC原理


(12)
将式(10)代入式(12),得um的作用时间tm为

(13)
uzero的作用时间tz为
tz=Ts-tm
(14)
作用时间确定之后,便可以预测id(k+1)、iq(k+1),在此过程中,考虑作用时间的因素,预测模型式(2)中的ud、uq应改写为虚拟电压矢量对应的dq轴分量:

(15)
然后,6组有效电压矢量及其作用时间的组合可得到6个对应的电流预测值,将6个电流预测值依次代入价值函数式(6),选出使g值最小的电压矢量与其作用时间组合,并根据减少开关切换次数原则选择零矢量,最终将该组合作为最优输出以控制VSI。
由上述原理可搭建占空比MPCC控制框图,如图2所示。
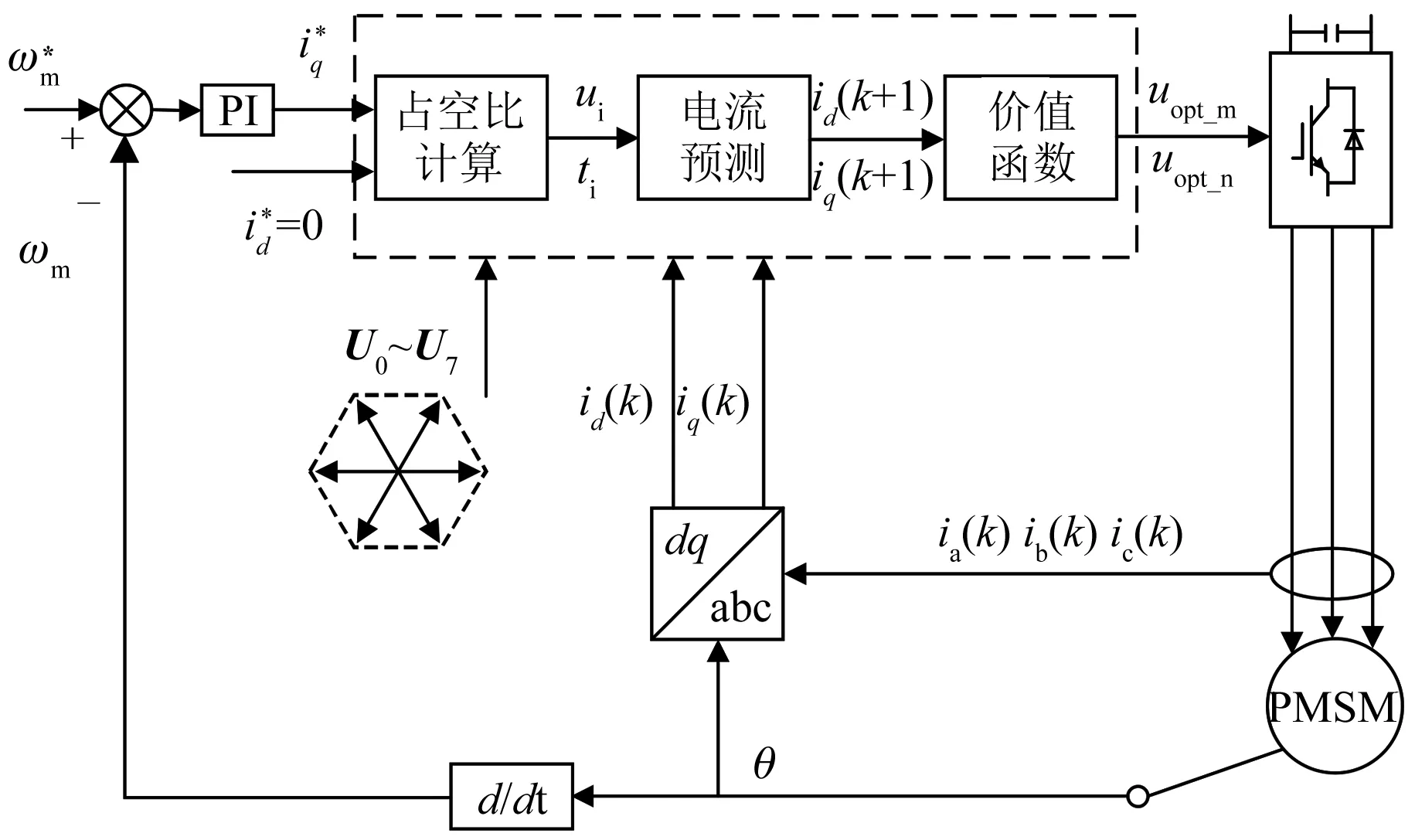
图2 占空比MPCC控制框图
2.3 三矢量MPCC原理
三矢量MPCC控制框图如图3所示。

图3 三矢量MPCC控制框图
在6个有效电压矢量中选出能够使价值函数最小的电压矢量作为三矢量MPCC策略中第1个有效电压矢量uopt1,寻优过程与传统MPCC相同。然后,根据uopt1确定候选电压矢量组合,选取原则为除了uopt1,其余有效电压矢量均可作为第2个有效电压矢量uj的候选矢量,uzero的选取遵循开关切换次数最少原则,矢量组合情况如表1所示。
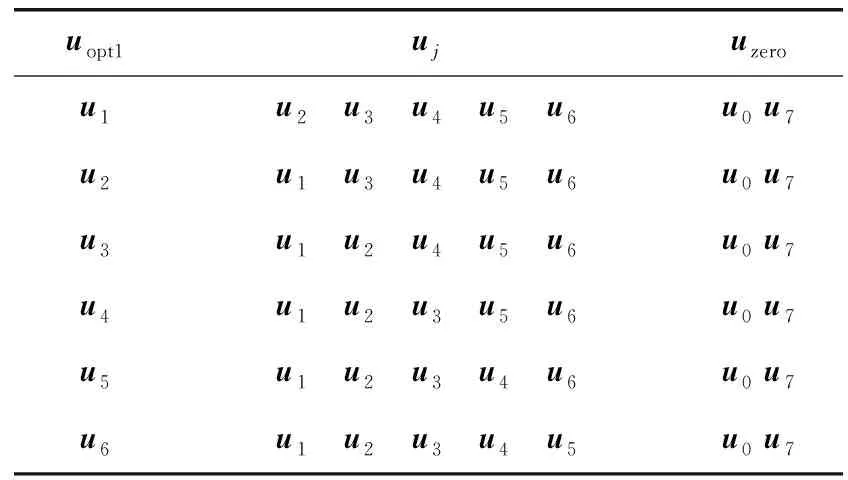
表1 三矢量MPCC候选电压矢量组合表
根据dq轴电流无差拍原则确定候选电压矢量组合中各个电压矢量的作用时间,有:

(16)
结合式(11),可得uopt1、uj与uzero的作用时间topt1、tj、tz分别为
(sdz-sdj)+Ts(sqzsdj-sqjsdz)}
(17)
(sdopt1-sdz)+Ts(sqopt1sdz-sqzsdopt1)}
(18)
tz=Ts-topt1-tj
(19)
且有:
D=sqzsdj+sqopt1sdz+sqjsdopt1-sqopt1sdj-
sqjsdz-sqzsdopt1
(20)
则对应的虚拟电压矢量的dq轴分量为

(21)
最后将5个虚拟电压矢量依次代入预测模型式(2)中,得到id(k+1)、iq(k+1),根据价值函数式(6)选出使g值最小的虚拟电压矢量作为输出以控制VSI。
3 3种控制策略的比较
根据上述3种控制策略的控制原理,从3个方面分析其差异性:发出矢量个数、电压矢量选择范围和矢量作用时间计算方法,如表2所示。

表2 控制策略差异表
3种MPCC最明显的差异就是单个采样周期输出的电压矢量个数不同。通过增加输出矢量个数扩大了电压矢量的选择范围,传统MPCC、占空比MPCC与三矢量MPCC的电压矢量选择范围如图4所示。传统MPCC的备选电压矢量是固定的基本电压矢量;占空比MPCC可选择的电压矢量幅值可调,但方向仍固定在基本电压矢量上;三矢量MPCC通过2个有效电压矢量与1个零矢量合成1个虚拟电压矢量,可使电压矢量的选择范围覆盖到任意幅值和任意方向。

图4 电压矢量选择范围
最后,在传统MPCC中,寻优得到的最优电压矢量作用一整个采样周期,不存在矢量作用时间的计算方法;在占空比MPCC中,通过分配有效电压矢量与零矢量的作用时间,实现了q轴电流无差拍;在三矢量MPCC中则同时实现了对dq轴电流的无差拍控制。
4 仿真验证
在MATLAB/Simulink环境中搭建PMSM的传统MPCC、占空比MPCC及三矢量MPCC模型并进行对比仿真,电机参数如表3所示,采样频率均为20 kHz,且均采用相同的PI参数(KP=0.2,KI=10)。

表3 永磁同步电机仿真参数
4.1 静态运行特性
稳态运行仿真工况为,转速300 r/min,负载0.6 N·m。电机转速n与a相电流ia波形如图5所示。与占空比MPCC、三矢量MPCC相比,传统MPCC的转速波形存在较大的抖振,且a相电流波形谐波较大。对传统MPCC、占空比MPCC、三矢量MPCC的a相电流做FFT分析,其频谱图如图6所示。其中传统MPCC中THD=15.19%,占空比MPCC中THD=2.93%,三矢量MPCC中THD=2.81%。因此可以看出,与传统MPCC相比,多矢量MPCC可以有效改善系统的稳态性能,减小电流谐波。

图5 稳态运行下转速与相电流波形图

图6 FFT分析频谱图
4.2 动态运行特性
图7为电机给定转速1 500 r/min,带0.6 N·m负载起动,0.2 s突加负载至1.2 N·m时3种控制方法的动态响应图。由图7可知,在发生负载突变时,3种控制策略的转速均有小幅下降,但均能快速跟随上给定转速。

图7 负载突变状态下转速与相电流波形图
图8为3种控制策略下,电机带0.6 N·m负载,0.2 s转速突变的电流跟踪情况。由图8可以看出,转速由500 r/min加速到1 500 r/min时,3种控制策略均有较快的电流响应速度,均能够实现转速的快速跟踪。

图8 转速突变状态下转速与相电流波形图
从上述仿真结果可以看出,无论是转速阶跃还是突加负载,3种控制策略均能达到快速响应,但多矢量MPCC与传统MPCC相比具有更小的转速与电流波动,与稳态运行结果相符。由此可以说明多矢量MPCC不仅改善了系统的稳态性能,还保持了良好的系统动态响应性能。
5 结 语
本文针对两电平三相电压源逆变器供电的永磁同步电机的3种MPCC策略,进行了比较研究。介绍了3种控制方案的控制原理,并分析了三者的差异性,与单矢量MPCC相比,多矢量MPCC在单个周期发出多个电压矢量,扩大了电压矢量选择范围,可实现d、q轴电流的无差拍控制。最后通过仿真对比分析三者的动静态性能。结果表明,多矢量MPCC明显减小了单矢量MPCC中的电流脉动,提高了稳态性能,同时能够保持良好快速的动态响应性能。本文针对不同MPCC策略进行的比较研究为后续进行实物试验验证做了准备工作,奠定了基础。
