车用永磁同步电机电感参数的精细化分析
2021-11-22王海燕熊端锋
王海燕, 孙 涛, 熊端锋, 代 颖
[1.上海大学 机电工程与自动化学院,上海 200072;2.晗兆检测技术(上海)有限公司,上海 200435]
0 引 言

车用电机通常采用定子斜槽或转子斜极的方式削弱齿谐波、抑制转矩脉动,而斜极会引起电机轴向磁场的变化,进而对电机电感产生影响[8-9]。目前,计算PMSMd、q轴电感参数的方法主要有冻结磁导率法和有限元法,其中有限元法计算速度快、精度高且工程实用性强,同时考虑了电机磁路非线性、交叉饱和等因素[10-13]。
本文以一台纯电动车驱动用内置式永磁同步电机(IPMSM)为研究对象,采用有限元法分析在不同负载电流下定子斜槽的增量电感和视在电感的变化情况,揭示在磁路不同饱和程度下两种电感的差异及变化规律。同时,详细对比定子斜槽和转子不同分段数斜极时这两种电感的变化情况,了解斜极对电感的影响。
1 视在电感和增量电感
1.1 电机参数
本文研究对象为一台纯电动车驱动用IPMSM。电机主要参数如表1所示。

表1 电机主要参数
转子采用内置式“V一”型结构,其轴向截面如图1所示。

图1 电机轴向截面
1.2 视在电感和增量电感的定义
电机电感按磁链和电流之间的关系可定义为视在电感和增量电感[4],表达式为:

(1)
式中:Lapp为视在电感;Linc为增量电感。下文中,下标“app”代表视在电感,下标“inc”代表增量电感。
图2为两种电感在磁链-电流坐标下的示意图。由图2可知:当电机运行在非饱和区(如点1)时,两种电感值基本相等;当电机运行在饱和区(如点2)时,增量电感随着磁路饱和程度的增加逐渐小于视在电感,差值越来越大。

图2 视在电感和增量电感示意图
2 电感参数的计算和分析
2.1 d、q轴电感参数的计算
当考虑交叉耦合效应时,id、iq不同时为零,则有[14-15]:

(2)
式中:Ldd、Ldq为d轴电流单独激励产生的d轴自感和与q轴交叉耦合电感;Lqq、Lqd为q轴电流单独激励产生的q轴自感和与d轴交叉耦合电感,且有Ldq=Lqd;LAA为A相绕组的自感;LAB为B相绕组对A相绕组的互感;LBB和LAC等定义与LAA和LAB类似;C3s/2r=

在额定电流激励下不同转子位置处的视在电感Ldd(app)如图3所示。由图3可知:d轴自感随转子位置变化范围为699.2~716.7 μH,平均值703.3 μH,差值较小。在每个电流运行点下电感参数的计算可以选取多个位置点求解并取平均值,从而使计算结果更加精确,但计算量过大、对整体精度提升不明显。为了提高计算效率,本文仅选取一个固定转子位置角度θe=180°进行计算。通过有限元仿真可以计算出考虑电感交叉耦合效应时三相绕组的增量电感和视在电感,根据式(2)计算出dq坐标系下的增量电感和视在电感。

图3 d轴自感随定转子位置变化曲线
2.2 视在电感和增量电感对比
为研究峰值功率70 kW车用电机d、q轴电感参数从磁场不饱和到饱和严重的整个运行区间内的变化情况,结合电机峰值负载时其对应的d、q轴电流id=-222 A、iq=207 A,确定了电机负载电流的取值范围id∈(-300 A,-30 A)、iq∈(30 A,300 A)。图4为dq坐标系下视在电感、增量电感和视在电感减增量电感的差值随负载电流变化的的三维图。

图4 视在电感和增量电感
由图4可知,在整个电流取值范围内,视在电感和增量电感的变化趋势类似,随着磁路饱和程度的增加,两种电感的差值先逐渐增大再趋于稳定,符合图2揭示的变化规律。
在图4(a)的d轴自感中,视在电感和增量电感两者差值的范围为0.39~0.54 mH。当iq≥210 A时,电机磁路饱和非常严重,两种电感的差值上升缓慢;在iq较大时,增量电感的取值范围为0.13~0.19 mH,为视在电感的20%~30%。在图4(b)的d、q轴交叉耦合电感中,两种电感的差值范围为-0.04~0.07 mH,差值较小。在图4(c)的q轴自感中,两种电感的差值范围为0.47~1.15 mH,差值较大;当iq≥150 A时,电机磁路饱和严重,两者差值由上升趋势变为缓慢下降趋势,且增量电感的取值范围为0.10~0.29 mH,为视在电感的11%~22%。
综上所述,视在电感和增量电感在不同负载电流范围内存在较大差值,且两者差值受iq的影响较大,随着iq的增大而先增大再趋于稳定。
3 转子斜极对电感的影响
3.1 转子斜极对磁场的影响
当电机转子斜极时,定子和转子的相对位置会发生变化。图5为电机转子分5段斜极的电机轴向展开图,其中θsk为转子分段斜极角度。对于处于不同轴向位置的磁极来说,其周向位置发生了偏移。

图5 转子5段斜极时电机轴向展开示意图
当定转子相对位置发生变化时,每个切片面所对应的电枢电流相位角会存在差异,使电机轴向截面磁场分布不再保持一致。图6为电机转子5段斜极在不同轴向位置处的相对磁导率分布图,图中定子侧磁场变化相对较大。

图6 转子5段斜极时相对磁导率沿轴向分布
电机转子分段斜极可以有效削弱齿谐波,且削弱的齿谐波阶数与分段数密切相关,不同分段数又会影响电机电感[16]。为研究转子斜极对电感的影响,本文对比分析转子2段、3段、4段、5段式斜极以及定子连续斜极和未斜极这6种情况下电机的视在电感和增量电感的变化情况。
3.2 斜极对视在电感的影响
图7为上述6种情况下d、q轴视在电感随负载电流变化的三维图。相比未斜极电机,斜极电机的d轴自感和d、q轴交叉耦合电感均增大,而q轴自感减小。
在图7(a)的d轴自感中,随着分段数的增加,Ldd(app)逐渐减小,接近未斜极的电感值;Ldd(app)减小的幅度受电机运行工况的影响,在id较小、iq较大时,斜极和不斜极Ldd(app)之间的差值较小。
在图7(b)的d、q轴交叉耦合电感中,随着分段数的增加,Ldq(app)逐渐减小,接近未斜极的值;未斜极的Ldq(app)与转子5段斜极和连续斜极情况下的值在整个负载电流范围内几乎相等,但与转子2段、3段斜极情况下的差值较大。
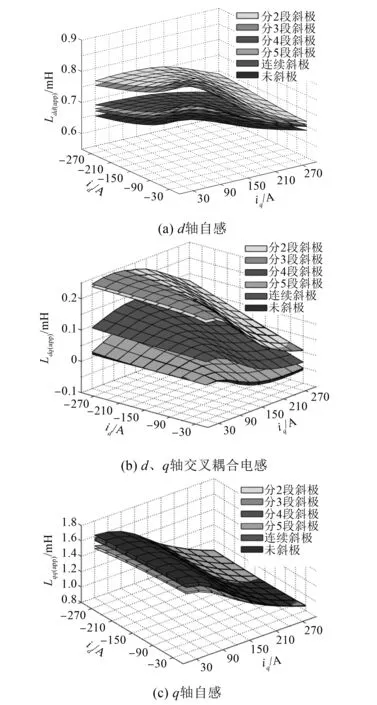
图7 转子斜极对d、q轴视在电感的影响
在图7(c)的q轴自感中,随着分段数的增加,Lqq(app)逐渐增加,接近未斜极电感值;在iq较大时,转子斜极电机的Lqq(app)与未斜极的Lqq(app)差值非常小。
3.3 斜极对增量电感的影响
图8为上述6种情况下d、q轴增量电感随负载电流变化的三维图。相比未斜极电机,斜极电机的d轴自感和q轴自感均减小,d、q轴交叉耦合电感增加。

图8 转子斜极对d、q轴增量电感的影响
在图8(a)的d轴自感中,随着分段数的减小,Ldd(inc)逐渐增加,接近未斜极的Ldd(inc);转子分段斜极和连续斜极与未斜极电机Ldd(inc)在整个电流变化范围内变化趋势类似,仅2段斜极电感在饱和区发生跳跃式变动。
在图8(b)的d、q轴交叉耦合电感中,在iq较大、id较小时,斜极与未斜极的Ldq(inc)差值较小。
在图8(c)的q轴自感中,随着分段数的减小,Lqq(inc)逐渐增加,接近未斜极的Lqq(inc);在iq较大时,转子斜极与未斜极的Lqq(inc)接近。
综上所述,在负载电流取值范围内,电机的视在电感和增量电感随着转子斜极段数的不同发生变动。在电机d轴自感中差异比较大,视在电感和增量电感取值范围分别为0.6~0.9 mH和0.1~0.6 mH,随着分段数的增加,两种电感均减小,但未斜极电机电感在视在电感中为最小,而在增量电感为最大。在d、q轴交叉耦合电感中,视在电感和增量电感取值范围几乎相同,但在iq较大时斜极对增量电感值影响较小。在q轴电感中,未斜极电机电感在两种电感计算方法下皆为最大,但随着分段数的增加,视在电感增加而增量电感减小,同时iq较小时转子分段数对增量电感影响较大。
4 结 语
本文采用有限元法研究了一台峰值功率70 kW的车用IPMSM的电感参数,对比分析视在电感和增量电感随磁路饱和程度增加的变化规律,并研究了转子斜极对这两种电感的影响。结果表明:在整个负载电流范围内,车用电机d、q轴自感的视在电感均大于增量电感,两者之间的差值随着q轴电流增大而先增大再趋于平缓,其中,q轴电流较大时,增量自感仅为视在自感的11%~30%;相比未斜极电机的视在电感和增量电感,斜极电机的q轴自感均减小,d、q轴交叉耦合电感以增加为主,而d轴自感在视在电感中减小、在增量电感中增大。
电感参数在不同负载工况下的精确计算是车用电机高精度控制系统中的一个重要变量。考虑磁路饱和程度及斜极对电感的影响有利于提高车用电机转矩控制效果。
