磁悬浮准滑模目标跟踪控制器设计
2021-11-19任鹏飞卢金燕
薛 鹏,任鹏飞,卢金燕
(河南工程学院,河南 郑州 451191)
1 引言
在非接触支撑控制技术中,磁悬浮技术的理论研究推进较为迅速。磁悬浮衍生的产品技术又以交通和航天领域的应用推进较快[1-3]。受到对象建模不确定和随机干扰因素的影响,为磁悬浮系统设计对模型精度依赖程度低,抗干扰能力强的控制方案成为值得长期研究的方向。
基于线性时不变模型,PID控制以其结构简单、参数整定方便的优点常见于控制方案的设计[4,5],但存在稳态精度低、抗干扰能力差的缺点[6]。采用变参数PID控制或非线性PID控制可增强系统刚度,提高其抵抗外力冲击的能力[7]。为提高系统抗干扰能力和稳定性,采用增加干扰观测器的方式,以可控参数更多的分数阶PID为基础[8-10],并融合遗传算法、粒子群算法等人工智能的复杂算法更多地被用于磁悬浮控制[11,12],以期待得到更好的控制效果。既有研究结论表明,对象建模的不确定性不利于系统有效控制方案的设计,有必要讨论对精确模型依赖程度低的控制方案。
滑模控制律通过迫使状态轨迹沿滑模曲面的切换线快速滑动到原点,具有响应快、结构简单的特点[13-15]。又因滑模变结构控制不完全依赖对象模型,本文通过滑模控制方案实现被控小球对目标悬浮位置的有效跟踪。控制信号在滑模面的反复切换使得系统具有天然的抖振现象,为了保证系统输出的平滑性,在滑模滑动阶段采用连续控制的方法达到削弱输出抖振的目的。最后,通过PID、滑模SMC1和准滑模SMC2三种方案控制效果的对比验证了所得方案的有效性。
2 磁悬浮装置动态模型分析
磁悬浮装置的工作原理如图1所示。被悬浮小球通过电磁引力克服来克服重力,实现在目标位置的稳定悬浮。可以小球的力学方程、线圈的电磁方程为基础建立其动态数学模型。

图1 悬浮装置原理分析
忽略小球受到的不确定干扰力,则被控对象小球在此系统中只受电磁引力和自身重力的影响,其在竖直方向的动力学方程可描述为
(1)
式中,x为小球质心与电磁铁磁极之间的气隙(以磁极面为零点),m为小球的质量,重力加速度g=9.8m/s2。
在图1所示磁悬浮系统中,小球到电磁铁磁极的气隙为x,而磁阻主要集中在电磁铁磁极和小球所组成的气隙上。又因为铁芯由铁磁材料制成,其磁阻与气隙磁阻相比很小,故,磁阻为
(2)
式中,l为铁芯的导磁长度;μ0,μ为铁芯的相对磁导率;A,A0为铁芯导磁截面积。
由磁路的基尔霍夫定律有
Ni=φ(i,x)R(x)
(3)
则
(4)
式中,N为电磁线圈绕线匝数。
假设电磁铁没有工作在磁饱和状态下,且每匝线圈中通过的磁通量都是相同的,则线圈的磁通链数为
(5)
又由毕奥-萨伐尔定律可知,在空间任意一点所产生的磁感应强度都与回路中的电流强度成正比,因此磁通量φ也与I成正比,即
Nφ=Li
(6)
则瞬时电磁铁绕组线圈电感为
(7)
磁场的能量
(8)
则小球受到的电磁引力为
(9)
可知,电磁引力与气隙是非线性的反比关系,这也是磁悬浮系统不稳定的根源所在。
再分析电磁铁中控制电压和电流的模型,将电磁铁线圈用一电阻和电感线圈串联来代替。由电磁感应定律及电路的基尔霍夫定律可知
(10)
当小球处于平衡状态时,其加速度为零,此时小球所受合力为零。小球受到向上的电磁引力与小球自身的重力相等,因此得系统平衡边界条件
mg+F(i0,x0)=0
(11)
至此,磁悬浮系统方程联合描述为
(12)
在(12)式中,电磁系统中的电磁引力F和电磁铁绕组中的瞬时电流i、气隙x之间存在着较复杂的非线性关系。考虑系统悬浮目标范围不大,对系统在目标位置处进行线性化处理。应用泰勒级数,并略去高阶项,可得
F(i,x)=F(i0,x0)+Fi(i0,x0)(i-i0)
+Fx(i0,x0)(x-x0)
(13)
式中,F(i0,x0)是当磁极与小球间的气隙为x0,平衡电流为i0时电磁铁对小球的电磁引力,该引力与小球的重力平衡,所以有
F(i0,x0)=-mg
(14)
(15)
(16)
那么,系统方程(12)中的第一个等式可写作
(17)
进行拉普拉斯变换,得
(18)
再由边界条件(11),得
(19)

定义系统对象的输入量为功率放大器的输入电压,也即控制电压Uin,系统对象输出量为悬浮位置所反映出来的输出电压,也即传感器后处理电路输出电压Uout,则该系统控制对象的模型可描述为

(20)
式中,ka,ks为相应控制电压信号对应的增益系数。
以线圈电压uin为输入,小球悬浮位置y=x为系统输出,可由(20)式得系统状态表述模型为

(21)
以固高磁悬浮实验装置GML1001为参照对象,表1给出了试验中所采用的磁悬浮系统的主要参数。那么,式(21)中,c=2502.96,a0=981.511。

表1 悬浮系统主要参数列表
3 控制器设计
以(20)(21)式作为系统模型,进行磁悬浮控制器设计。
3.1 PID控制器设计
在文献[15]中,给出了一种PID控制器的设计思路,这里引用作为控制效果比较对象。其控制参数Kp,Ki,Kd,设计过程简述如下:
(22)
(23)
(24)
记跟踪误差e=r-y=r-cx1,控制律设计为
(25)
这种控制方案以欠阻尼闭环稳定为设计目标。
3.2 SMC控制器设计
在系统方程(21)中,由输出方程可得
y=cx1
(26)
那么,悬浮位置跟踪目标r为给定常数,跟踪动态误差为
e=r-y=r-cx1
(27)
由系统方程(21)中的状态方程可得
(28)
误差e决定控制系统的控制律。为使得系统完全渐近稳定,对任意初始值e(t0),需要
(29)
设计磁悬浮系统滑模曲面为
(30)
那么,由(28)(29)式,可得
(31)
(32)

(33)
此时,系统渐近稳定,误差以1/λ为时间常数按指数律趋近于零。
为了使得系统能够快速到达滑模面,进入滑动阶段,考虑扰动上界,采用控制律
(34)
式中,β≥e为不确定扰动的上界,当悬浮目标位置为20mm时,可取β≥20a0=981.511×20。f(·)是滑动阶段的切换函数。切换函数的限幅依赖控制电压,其范围限制在[-10+10]。
由(31)和(34)得系统控制量为
uin=ueq+Δup
(35)
式中,Δup是与扰动相关的补偿控制量,有
(36)
对于(34)和(36)式中切换函数的选择问题,在滑模控制的到达阶段考虑快速性,在滑动阶段考虑平稳性。分别记
(37)
(38)

记李雅普诺夫函数为
(39)
有
(40)
这表明两种滑模控制方案均可使得所设计系统的稳定性是满足的。仿真分析中进一步对控制系统的动态性能进行分析。
4 仿真分析
以表1中列写数据为被控对象主要参数,通过所设计的控制律实现悬浮小球在目标位置悬浮的仿真分析。如表中所示,小球平衡时球心到电磁铁底面的距离为20mm,而小球半径为12mm,因此,小球上切面到电磁铁底面的距离为8mm。
4.1 目标跟踪分析
图2所示为三种控制方案的仿真结果。其中PID控制方案为文献[18]中的方案,采用(34)和(35)式所得方案时,分别用SMC1和SMC2进行标识。在图2结果中,PID方案的控制效果和参数调节直接相关,仅实现了系统的欠阻尼稳定输出控制,仿真结果具有较大的超调量;SMC1方案采用符号函数设计等速趋近律,在系统进入滑动阶段后存在明显的抖振现象;采用饱和函数后,SMC2控制方案呈现平滑稳定的控制效果。

图2 小球悬浮位置的阶跃响应
表2对三种控制方案的目标跟踪性能指标进行了对比,可见,SMC2方案在保证快速性的同时,实现了无超调平稳跟踪,并且在稳态阶段没有明显抖振现象。
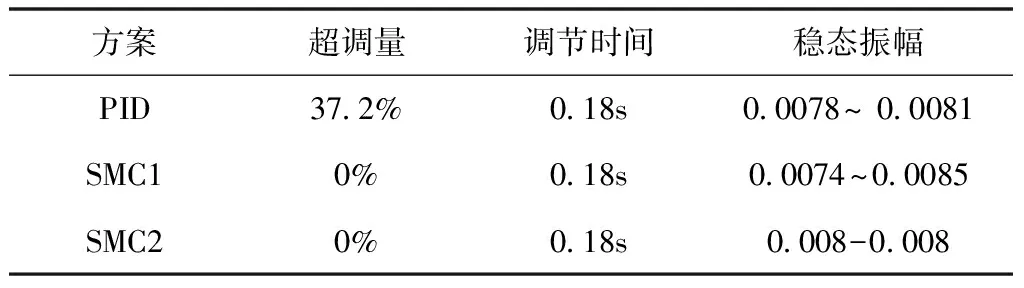
表2 目标跟踪性能指标
滑模控制方案SMC2的动态相函数在图3中给出,可见:滑模控制在到达阶段具有快速收敛特性,并在滑动阶段非常平稳。

图3 SMC2控制方案中的滑模曲面趋近
4.2 抗扰能力分析
进一步分析所得控制方案的抗干扰能力。在小球位置输出的反馈环节加入幅值为给定信号2.5%的随机干扰,分别采用三种控制方案得到小球悬浮位置输出如图4所示。与PID方案和SMC1方案相比,准滑模控制方案SMC2的优势在于速度快并且没有超调。在外部干扰存在的情况下,t=1秒时跟踪目标的变化导致SMC1方案出现较大的输出波动。图5给出了在1.2s-1.5s时三种控制方案的输出比较,可见,切换控制SMC1出现明显抖动,而方案SMC2仍然保持快速平稳的控制效果。

图4 干扰影响下小球的悬浮位置输出

图5 系统稳态振幅(1.2s-1.5s)
方案SMC2对于外部干扰具有较强的鲁棒性,其代价是需要更强的控制作用。图6给出了图4中三种控制方案所对应的控制律,可见,方案SMC1的控制律在[-1,1],而方案PID的控制律在[-3,3],而SMC2方案对应的控制律范围为[-50,50],即便在稳态阶段,控制律也在[-15,15]范围内波动,明显比另外两种方案大得多。

图6 三种方案在干扰影响下的控制律
5 结束语
针对模型不确定性问题,本文采用滑模变结构方法为单自由度磁悬浮小球的控制问题设计了准滑模控制方案,分析结果显示:
1)给出的PID、切换变结构滑模SMC1和连续滑动结构准滑模SMC2三种方案均实现了对目标位置的稳定、快速跟踪。
2)采用连续滑动结构的准滑模控制比欠阻尼PID控制具有更平稳的过渡过程,比切换变结构滑模控制具有更平滑的稳态输出。
3)在滑动阶段采用连续控制律的SMC2抖振较小,具有更强的抗干扰能力。
材料技术的成熟和快速处理器的不断出现为复杂算法的实时应用提供了基础。所得结论为后续研究及实证试验测试提供了参考方案。