基于聚类的超声射频图像阴影双线性补偿方法
2021-11-19袁艺标
罗 扬,袁艺标
(1.金陵科技学院软件工程学院,江苏 南京 211169;2.南京医科大学,江苏 南京 211166)
1 引言
人类视觉基础的载体为图像,通过图像能够反映出世界自然景物的所有客观情况。图像中的“图”,即光源照在物体上发生透射或者反射的光形成光分布,眼睛对这些分布的光源进行接收,形成图。而“像”则是在眼睛接收物体反射的光源时出现在脑海内的画面,从而呈现出这个物体原本的样子,即为像。目前较多应用领域中的图像包含:卫星云图、传真、地图、手写汉字、绘画、脑电和心电图以及照片等。但是,在对图像信息进行获取时,由于设备的不完善或者外界干扰等情况,会导致获取的图像内存在阴影,若所需目标处于图像阴影部分,那么则需要对阴影部分实现补偿,达到清晰化图像的目的。
文献[1]针对因遥感影像内阴影会致使地物的信息受损导致的图像质量下降,提出联合对数变换以及局部增强高分的遥感图像阴影补偿方法,设计对于改进对数变换的图像增强方式,建立对数变换模型,利用阴影边界同类特征点匹配完成阴影区域的亮度提升。通过联合局部的补偿模型,对其实现加权处理,提升阴影区域对比度,针对阴影边界的同类特征点匹配情况,实行自动解算的补偿模型参数,完成图像阴影部分的自动补偿。文献[2]提出基于亮度补偿的阴影遮挡路面方法。通过亮度补偿完成像素点空间域的增强和阴影区域恢复,同时增大道路面积的阴影以及周围环境的差异,再分割非阴影图像的道路,提取道路信息,通过细化处理,最后完成阴影遮挡的道路提取。上述方法虽然能够有效补偿图像阴影部分,不过在补偿结束后,没有调整阴影同质区域亮度,导致阴影与同质区域接触地方细节丢失,在实际应用过程中,很难满足需求。
为解决传统方法的不足,本文提出一种基于聚类的超声射频图像阴影双线性补偿方法。该方法利用最大类间方差的阈值分割方法,利用加权估计位置插值点灰度值计算双线性插值,引入RGB色彩空间以及HIS色彩空间方法实现图像阴影补偿。所提方法应用后图像细节未丢失,且图像整体亮度得到明显提高。
2 基于聚类分析的图像阈值分割方法
2.1 最大类间方差的阈值分割
为避免图像阴影补偿后非阴影区域亮度过高产生曝光问题,提出图像阈值分割算法。首先需要提取图像内目标以及背景处的灰度特征差异,获取适合的阈值,再确认图像内全部的像素点,获取相应的二值图像。
本文使用的最大类间方差分割法基本思路为:通过固定任意阈值将图像分割成两组,计算被分成两组的图像间方差,当获得最大方差时即确定为阈值[3]。
将图像的灰度值设置成1-m级,那么灰度值i的像素则为ni,可以得到公式为
(1)
利用k将其分成两组C0={1-k}以及C1={k+1~m},所有组生成的像素概率公式为
(2)
(3)
式中:ω代表像素平均值。在1-m间更改k,计算出上式是最大值k,就能够求出maxσ2(k)的k*值,这时,阈值即为k*值[4]。
2.2 聚类分析
假设数据集X内包括n个样本(n个元),即为:xk,k=1,……,n。而聚类问题就是将{x1,x2,……,xn}区分成内c个子集,2≤c≤n,类似的样本要尽可能地在相同类中,c代表聚类数[5]。
典型的聚类方法是将所有辨识对象划分,将其分成属于某一种类。但在实际应用过程中,部分对象不存在严格属性,这是因为辨识对象可能是处于两类之间,因此利用模糊聚类分析,能够得到最佳效果。而模糊聚类分析是将数据集X={x1,x2,……,xn}分成c类,在设X内xk对于第i类的隶属度是μik,其中0≤μik≤1。因此分类的结果能够利用x×n矩阵表示,可以得到具体公式为
(4)
为可以在众多分类内得到合理分类的结果,因此要确认合理聚类的准则,那么目标函数J(U,V),具体公式为
(5)

dik代表第k个样本至第i类距离,具体公式为

(6)
式中:xk代表数据样本,xk∈RP,T代表矩阵转置,矩阵A代表对称矩阵。当A=I时,就是欧式距离[6]。
目标函数J(U,V)表示样本距离聚类中心的平方和,而权重为xk至i类的隶属度m次方,即J(U,V)为极小值,即(min){J(U,V)}。
由于矩阵U内所有列均为独立的,因此具体公式为

(7)
(8)
最优化一阶的必要条件公式为
(9)
(10)
通过式(10)能够获得具体公式为
(11)
将式(11)带入至式(9)内,可以得到具体公式为

(12)
因此
(13)
将式(13)带入至式(11)中,可以得到具体公式为
(14)

Ik=i|1≤i≤c,dik=0
(15)
(16)
再利用J(U,V)获得最小μik值,可以得到具体公式为
(17)
(18)
在能够得到J(U,V)时最小时Vi值,可以得到具体公式为
(19)
如果数据集X、聚类的类别数c以及权重m为已知条件,即可使用式(17)、(18)以及(19)确认最优分类矩阵以及聚类中心。此方法能够利用迭代方法进行求解,使用模糊C均值方法。此方法是先实现隶属度的矩阵初始化,利用式(19)求出c聚类中心,接着通过式(17)或者(18)获得隶属度矩阵,然后带入式(19)中,得到全新c个聚类的中心[8]。
在新聚类中心和开始聚类中心二者距离差,在允许误差的范围中,在算法收敛之后,将门限分割设置成α,获得具体的图像分割结果公式为
μik=max{μ1k,μ2k,Λμck}≥α,xk∈i
(20)
3 超声射频图像阴影双线性补偿
3.1 双线性插值法
超声射频图像插值能够理解成是采用插值点附近的相邻像素点,再使用加权对位置插值点灰度值进行估计。双线性插值方法以插值点附近的点加权内插,将其作为此点灰度值,f(i,j),f(i+1,j),f(i,j+1),f(i+1,j+1)代表起始低分辨率的图像像素点,f(i+u,j+v)代表插值点,而双线性的插值,具体公式为
f(i+u,j+v)=(1-u)(1-v)f(i,j)+(1-u)
vf(i,j+1)+u(1-v)f(1+1,j)+uvf(i+1,j+1)
(21)
式中:f(i,j)代表图像处于(i,j)位置时灰度值,u与v代表插值点与(i,j)点垂直以及水平的距离。
若插值点都是均匀分布的,且对于随意的M>0都存在maxx∈[a,b]|f(N+1)(x)|≤M,具体公式为
(22)
在N=1时,是两点x0,x0+h间线性的插值,以此两点之间具有一个点ξ,可以得到具体公式为
监控系统人机界面的设计主要任务为系统中各个控制界面与监测界面的设计,进行静态操作界面的绘制、动画的制作及界面中各个元素与变量列表的连接,同时建立各个界面之间的逻辑关系。基于人机工程学[16],需重点考虑以下2点:

(23)
将(x0,x0+h)均匀的分布在k(k≥2)段,那么x=x0+(j/k)h,在其中j=1,……,k-1,以此式(28)能够得到公式为
(24)
在k=2时,j=1,上式能够进行变换[9],可以得到公式为
(25)
3.2 超声射频图像阴影补偿
3.2.1 抑制蓝光分量
利用阴影指数检测法计算超声射频图像的起始二值图像以及主成分变换二值图像,以便去除小区域的干扰噪声。接着利用数据形态学变换,在不触及原本目标形态的基础上,精准提出特征,实现超声射频图像背景的剔除。
将其转换至HIS的色彩空间前,对蓝色的分量抑制,可以得到具体公式为
(26)
式中:R(x,y)、G(x,y)、B(x,y)分别代表起始图像的红、绿与蓝色的分量,k=high/I′L(x,y),high代表非阴影区域的光照亮度,I′L(x,y)代表利用亮度低频的阈值进行处理,a、b代表颜色调整的参数,该数值通常为1,同时a>b。而非阴影区域,因为I′L(x,y)=high,就是k=1,在式(31)中,仅对阴影亮度以及颜色调整,处于非阴影的区域未受到影响[10]。
3.2.2 HIS分量补偿
仅抑制蓝光分量,并不能彻底改善图像的阴影区域,同时补偿其它分量,完成彻底改善。如果图像中的局部情况较为稳定,那么认为阴影区域和同质区域二者之间存在类似信息。对于阴影同质区域的选择是:在该区域内,不包括任何阴影像素,而同质区域,则处于阴影投射方向上的一定范围和阴影周围的区域。
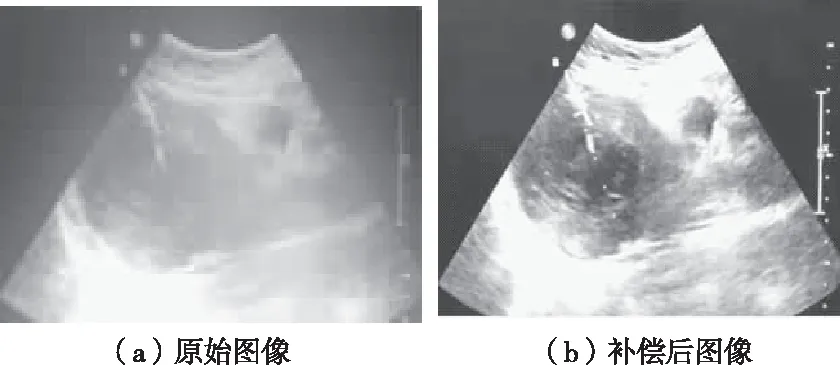
Ωnoshadow={ρ|0<Ωshadow) (27) 式中:Ωnoshadow代表相邻的某个阈值dist阴影同质区域集合,d(ρ,Ωshadow)代表某一个点至阴影区域距离[11]。 在确认阴影同质区域后,利用映射的方法分别补偿亮度I、饱和度S以及色度H。具体补偿公式为 H′(i,j)recov ered= (28) I′(i,j)recov ered= (29) S′(i,j)recov ered= (30) 式中:H′、I′以及S′代表阴影经过补偿后的色度、亮度和饱和度数值,H、I以及S代表起始阴影区域色度、亮度以及饱和度,u代表阴影与同质对应色度、饱和度以及亮度平均值,σ代表阴影区域与同质对应色度、饱和度以及亮度的标准差,A、B以及C代表补偿的强度系数,具体值的范围是0.6~1[12]。 为验证本文方法的有效性,选择实验平台为Intel(R)Core(TM)i73470CPU,其中,主频为4GHz,8G内存,运行平台与编程环境为:MATLABR2018b。观察图像阴影是否获得了较好的补偿效果,阴影区域亮度是否获得提高,图像质量是否获得改善。 图1图2分别为胸腔和腹腔的射频原始图像和补偿后图像。 图1 腹腔射频图像补偿效果 图2 胸腔射频图像补偿效果 根据图1和图2可知,所提方法下阴影区域亮度得到提升,变得更加清晰,但补偿前后图像的色调基本处于相同的状态,没有降低非阴影区域图像细节特征,使图像整体质量获得了明显的提升。 为进一步验证本文方法性能,通过计算阴影区域补偿前后的亮度方差以及颜色均值数据,得出结果,具体如表1所示: 表1 图像阴影补偿前后数据分析结果 通过观察表1能够看出:图1(b)、图2(b)的亮度均得到提高,且颜色方差值降低,说明图像色彩波动较小,更加符合人眼视觉对于色彩的捕捉。这是因为本文引入的色彩分量在HIS空间内对色度、亮度以及饱和度进行了双线性补偿,使阴影区域信息获得恢复。 本文提出的基于聚类的超声射频图像阴影双线性补偿方法。通过补偿后的图像比起始图像更清晰,亮度也得到了显著的提升,色调和非阴影区域色调处于基本相同的状态,细节也没有丢失,验证了本文方法良好的应用效果。 但是随着现在科技的发展,获取到的图像方式也各式各样,其中不乏存在一些处于特定场景以及获取图像质量较差的设备,导致得到的阴影图像,也存在着模糊、边缘细节丢失等情况,因此未来本文还需要进一步的研究,通过添加模糊处理、细节处理等补偿方法,并且保证实时更新、优化,跟上科技发展的脚步。4 仿真证明


5 结束语