常规高超声速风洞模型自由飞试验发射装置设计与应用
2021-11-19许晓斌
何 超,谢 飞,许晓斌,陈 磊
中国空气动力研究与发展中心 超高速空气动力研究所,四川 绵阳 621000
0 引言
风洞模型自由飞试验技术,是以某种方式将试验模型投放至风洞均匀流场中自由飞行,同时以高速摄影实时记录模型姿态随时间变化的图像序列,对图像进行判读,获得模型姿态随时间变化的数据(即运动轨迹),根据模型的质量特性参数和运动轨迹,反算出模型的气动力,进而定量或定性研究分析其气动特性。
风洞模型自由飞试验与常规风洞测力、测压试验相比,无支架干扰;与测量滚转(俯仰、偏航)阻尼、马格努斯力等动态特性的风洞试验相比,无支架干扰、无机械阻尼。但在高超声速试验中,支架干扰的影响不容忽视,其对动态测量的影响较静态测量更为严重[1]。
风洞模型自由飞试验结果可为飞行器外场自由飞试验提供参考,为制定总体方案、验证气动布局合理性等提供重要的气动力参数,提升外场自由飞试验的安全性,为飞行器试飞奠定基础。
早在20 世纪60年代,美国就开展了风洞模型自由飞试验。美国NASA Langley、AEDC、NOL、JPL、BRL和AMES 等研究机构在各种类型风洞中开展的一系列自由飞试验都获得了满意的结果。加拿大NAE、德国DFVLR、南非CSIR-ARU、英国南安普顿大学及日本也开展了风洞自由飞试验技术研究[2-6]。20 世纪80~90年代,随着高速数据采集系统、高速摄影和大容量高速计算机的出现以及控制技术的发展,风洞自由飞试验技术已发展成熟并应用于各种飞行器的定型试验。国外研究机构把风洞自由飞试验作为风洞试验、动导数试验、外场自由飞试验和数值计算等的必要补充。从20 世纪70年代开始,中国航天空气动力技术研究院、中国科学院力学研究所等都开展了风洞模型自由飞试验技术研究。中国航天空气动力技术研究院蒋增辉、宋威和鲁伟等在高速风洞上开展了模型自由飞试验技术研究工作;中国空气动力研究与发展中心(CARDC)超高速空气动力研究所在弹道靶中开展了大量自由飞试验技术研究,相关技术成熟,已具备多种口径的模型发射器和先进的测试仪器[7-15]。
目前,在常规高超声速风洞中开展的模型自由飞试验还较少,国内外关于风洞自由飞试验模型发射装置方面的公开报道很少。中国空气动力研究与发展中心超高速空气动力研究所在常规高超声速风洞中开展了模型自由飞试验技术研究,并在某高超声速风洞中开展了模型自由飞原理性试验。在此基础上,本文对自由飞试验模型发射装置进行优化设计,并在某高超声速风洞上开展验证试验。
1 模型发射装置总体设计
1.1 模型发射装置总体结构
高超声速风洞的模型发射装置应满足以下要求:
1)能够承受风洞启动和关车的冲击。风洞启动和关车时的强激波会对试验段中的模型和机构产生强烈冲击,模型发射装置应具有较高的强度和刚度,以确保试验安全。
2)能够满足试验所需的模型初始状态要求,如实现模型不同的初始发射角度等。
3)保证模型发射初速度足够大,使模型飞行时间、在观察区内的飞行距离足够长,以获得足够多的自由飞行图像。
将自由飞模型发射到试验段气流中有高压空气驱动、弹簧驱动和火药驱动等多种驱动方式。综合考虑可靠性、安全性、可维护性以及发射参数的可调节性,常规高超声速风洞模型自由飞试验采用高压空气驱动的发射枪装置来发射模型。如图1所示,该装置主要包括安装基座、模型发射枪、模型发射枪支座、模型夹持器、模型阻拦回收网(图1 中未绘出)和气动控制柜等。
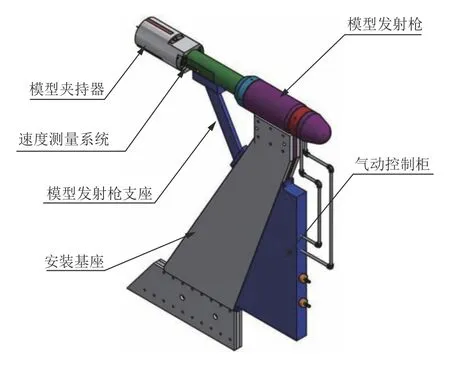
图1 发射装置结构图Fig.1 Structure of the launch device
安装基座:用于安装模型发射装置各结构,确保各结构的准确位置和可靠安装。根据风洞接口设计制造。
模型发射枪:当风洞启动、气流稳定后,以高压气体驱动发射枪活塞运动,模型夹持器到达预设位置时松开模型,模型以一定初速度逆气流方向发射,在风洞均匀流场中自由飞行。
模型夹持器:用于夹持模型并准确可靠地固定其位置,使模型轴线与发射枪轴线共线,确保模型初速度方向为正确方向。
模型阻拦回收网:在风洞试验段下方和扩压器内捕获、回收模型,防止模型损伤风洞及设备。根据风洞接口和模型大小设计制造。
气动控制柜:通过气路控制功能实现模型发射。
1.2 模型发射枪关键参数设计
模型发射枪通过调节发射压力(即发射枪驱动气体的压力)改变模型初速度(即模型离开发射枪口的速度)。试验时,可使模型从观察区下游进入,飞至观察区上游时对地速度刚好为零,然后倒飞一个观察区的宽度,相当于加长了飞行距离,可获取模型更多的飞行姿态信息。
模型从观察区下游边缘自由飞行至观察区上游边缘,则发射压力p和模型初速度v0有以下近似关系(忽略活塞与枪膛壁的摩擦力):
模型初速度v0与模型质量m、飞行距离L(即发射枪出口至试验段观察区上游边缘处的距离,由具体风洞状况决定)、来流动压q等参数的关系为:

在式(1)和(2)中:m1为发射枪加速部件(活塞、推杆、模型夹持器等)质量;S和S1分别为模型参考面积、发射枪活塞面积;L1为发射枪活塞加速段行程;L为模型飞行距离;CD为模型阻力系数。
发射枪外形总体尺寸主要由风洞堵塞度、模型飞行距离L决定,根据发射压力p和模型初速度v0设计发射枪活塞面积S1和发射枪活塞加速段行程L1这两个关键参数。由此可以分析得出发射枪工作流程为:先根据模型质量m、飞行距离L、来流动压q等参数预估模型初速度v0,再根据v0来确定发射压力p进行试验。
2 模型发射装置系统设计
2.1 模型夹持器
本文采用圆锥模型,模型夹持器应根据其具体外形进行设计,使贴合件能更好地应用于模型。
模型夹持器通过三爪结构安装固定模型。爪子以销钉安装于夹持器底座,爪子与底座之间安装扭簧。爪子上端安装导向杆,导向杆在套筒的导向槽内运动(如图2 和3所示),其功能为在发射时带动模型平稳加速。模型贴合件通过内六角螺钉连接于爪子内侧,可以根据模型外形进行更换。
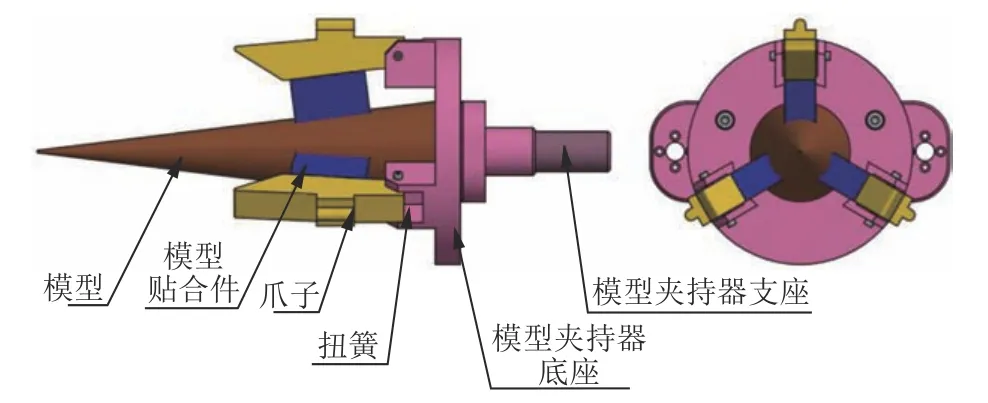
图2 模型–夹持器示意图Fig.2 Schematic of the model and fixed component
发射前,将模型置于夹持器三爪之间,向后推动夹持器底座,在套筒空间限制及扭簧作用下,夹持器贴合件紧贴并固定模型。在发射阶段,夹持器被推出套筒,爪子在扭簧及气动力作用下迅速张开,对模型的约束消失,模型实现发射。
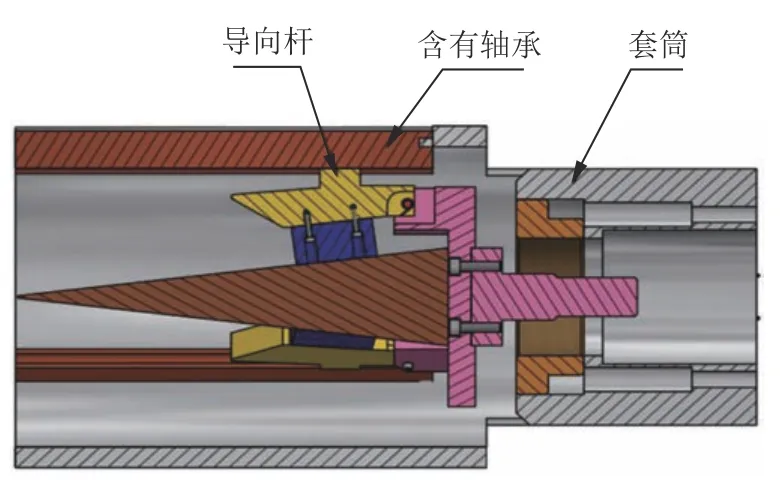
图3 模型-夹持器安装示意图Fig.3 Installation schematic of the model and fixed component
2.2 速度测量系统
速度测量系统主要测量发射过程的模型初速度和加速度。根据模型与夹持器的工作流程,模型初速度为夹持器达到的最大速度,也是活塞达到的最大速度,可通过测量活塞的最大速度来获得模型初速度。速度测量系统结构如图4所示,图5 为栅尺结构。
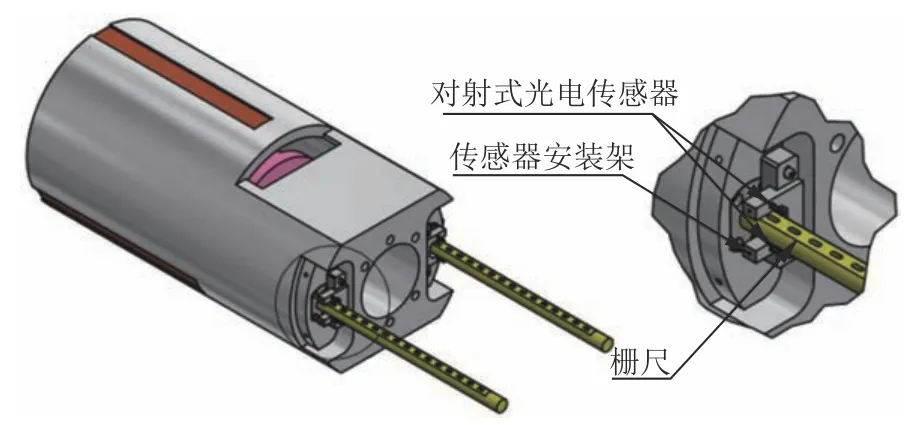
图4 速度测量系统结构Fig.4 Structure of the velocity measurements system
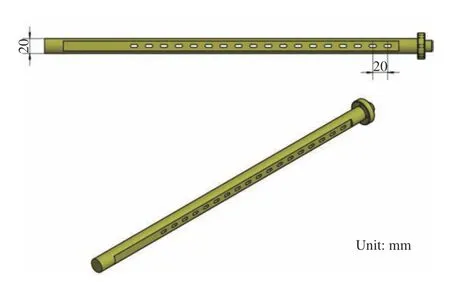
图5 栅尺结构Fig.5 Structure of the scale
基于对射式光电传感器特性,对栅尺进行设计。栅尺直径20 mm,开多个腰形孔,各孔轴向长度10 mm、中心间距20 mm。栅尺一端通过螺母固定于模型夹持器底座,另一端通过直线轴承固定于套筒上,保证栅尺顺畅运动。对射式光电传感器为光纤,响应速度可达23 μs,通过产生电脉冲来计算速度。
若栅尺以最大发射速度15 m/s 匀速运动,则两个脉冲间的最小时间间隔tmin=20/15≈1.33 ms,最高频率fmax=1/tmin=1/1.33=750 Hz。因此,控制系统最高输入脉冲频率为750 Hz 即可满足速度测量的需求。
2.3 气动控制柜
气动控制柜通过电磁阀来控制气路与气源之间的连通关系,从而控制发射枪的动作时序。发射枪气路使发射枪与风洞气源之间配合连接。模型发射装置气路原理如图6所示。
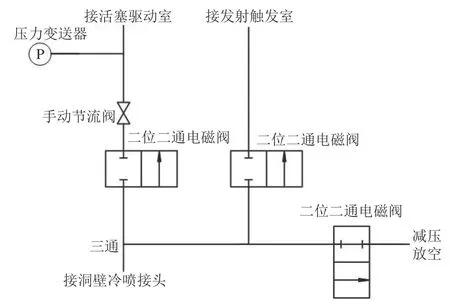
图6 气路原理图Fig.6 Schematic of the air tube principle
3 模型发射装置试验应用
3.1 风洞试验设备与试验条件
试验在CARDC 某高超声速风洞上开展。该风洞为暂冲、吹吸式常规高超声速风洞,配备了出口直径1 m,名义马赫数3.0、3.5、4.0、4.5、5.0、5.5、6.0、6.5、7.0 和8.0 的型面喷管,模拟高度20~60 km(马赫数不同,则模拟高度范围有所不同),试验时间30 s。风洞配备了较完善的测控系统,可以满足试验中各种参数测量与处理、流场显示与记录的需要。
设计发射枪出口至试验段观察区上游边缘处的距离L=1000 mm。试验来流条件如表1所示。

表1 来流条件Table 1 The test conditions
3.2 试验模型与装置
模型为半锥角7°的圆锥模型,全长198.672 mm,底部直径49.875 mm,质量168 g,模型参考面积为底部面积,模型阻力系数CD取值0.2。根据式(2)计算得出模型理论初速度v0=10.57 m/s。图7 为试验模型实物。

图7 试验模型Fig.7 Test model
设计发射枪外形尺寸:最大直径150 mm,长度1450 mm。发射枪活塞加速段行程L1=100 mm,发射枪活塞面积S1=0.00192 m2,运动部件总质量(m+m1)约为6 kg。根据模型理论初速度,由式(1)计算得到发射压力为1.75 MPa。
图8 为试验装置在风洞中的安装情况,图9 为试验模型安装于发射装置上的状态。

图8 试验装置Fig.8 Test device

图9 模型安装图Fig.9 Installation diagram of the model
3.3 风洞试验结果
发射装置发射压力1.75 MPa,实测模型发射初速度9.35 m/s,略低于理论初速度10.57 m/s,其原因有二:一是发射模型时,模型夹持器三爪与套筒之间的摩擦力较大;二是模型夹持器逆气流发射,气流阻力较大。
图10 为风洞模型自由飞试验发射装置发射过程(模型与发射枪脱离过程)以及模型飞行的部分高速摄影图像,图11 为模型与发射枪脱离及完全脱离后的高速摄影图像,图12 为模型飞行的部分高速纹影图像,图13 给出了模型初始飞行时的一个振荡周期。从图10~13 可以看出,模型发射后姿态平稳,发射装置对模型发射后的扰动干扰小,发射过程按照预估进程完成,达到了预期效果。

图10 模型部分飞行图像Fig.10 The flying picture of the model
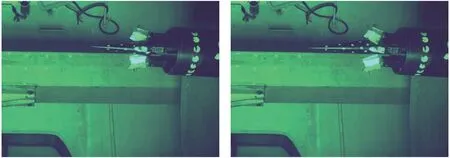
图11 模型初始飞行图像Fig.11 The initial flying picture of the model
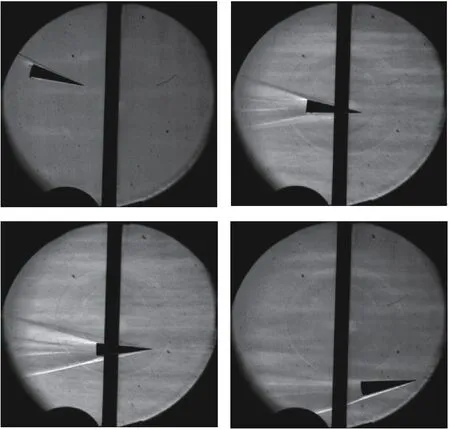
图12 模型部分纹影图像Fig.12 The schlieren image of the model
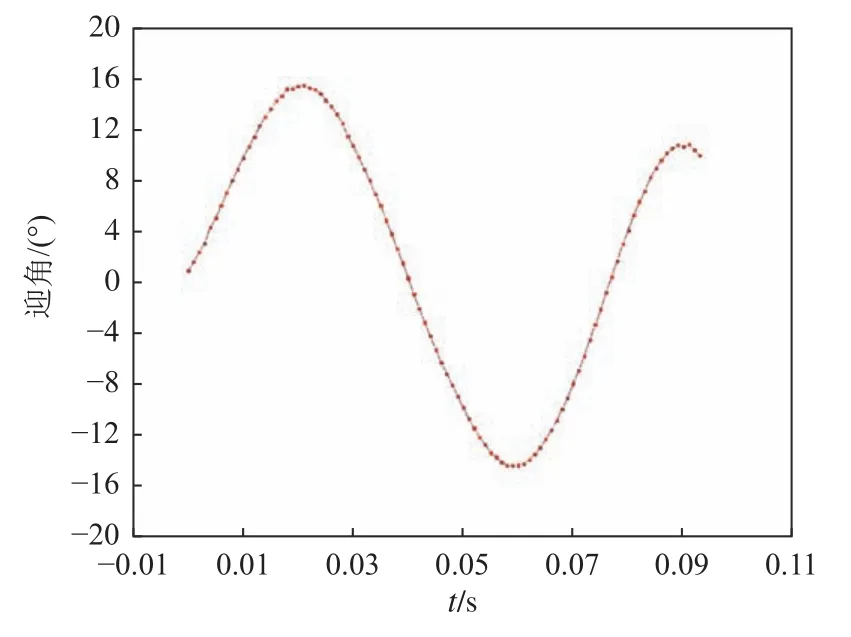
图13 模型初始振荡周期Fig.13 The initial oscillation period of the model
4 结论
针对常规高超声速风洞开展了自由飞试验模型发射装置详细设计与分析,并在某高超声速风洞上采用典型外形模型开展了风洞模型自由飞试验,得到以下结论:
1)针对某高超声速风洞设计研制的发射装置效果良好。根据不同风洞的堵塞度、发射模型大小、模型飞行距离等进行适应性改造,发射装置能够广泛应用于常规高超声速风洞自由飞试验。
2)设计发射装置结构时,应将模型发射压力与发射速度作为重要参数加以考虑。
3)针对圆锥模型采用了“三爪+模型贴合件”的模型夹持器。根据模型外形,夹持器需进行适应性设计。
