某型火箭布雷车模拟器发射装置的设计与开发
2015-08-19王朴李焕良申金星
王朴 李焕良 申金星


摘 要:研制了基于伺服控制技术的某型火箭布雷车模拟器发射装置。该装置采用“PC机+运动控制卡”控制策略,建立了上位机—运动控制卡—驱动器—执行电机硬件系统,开发了基于LabVIEW Softmotion Module的上位机控制软件,并利用NI模块化的软、硬件系统提高了模拟发射装置的灵活性和可靠性。
关键词:伺服控制;火箭布雷车;发射装置;LabVIEW
中图分类号:TJ303+.3 文献标识码:A DOI:10.15913/j.cnki.kjycx.2015.16.009
某型火箭布雷车是我军新一代布雷装备,但部队在对其使用的过程中面临列装数量少、训练损耗大、实弹射击危险性高等问题,严重制约了新装备战斗力的提高。因此,研制配套的模拟训练器可有效解决该型布雷车列装部队后训练水平低、训练手段落后等实际问题,从而节约训练经费、降低训练损耗和提高训练效率,具有重大的军事效益。
瞄准和射击是火箭布雷车战备训练中最重要的2个方面。在光学瞄准过程中,操作手装定诸元的准确度和控制调炮的熟练度决定了最终的射击速度和精度。因此,操控系统在驾驶席、炮长席和操瞄席等操作席位之外增设了模拟发射装置,着重体现了定向器的运动过程,并结合三维视景的音频、视频输出,达到了虚实同步的场景效果,最大程度地提高了操瞄训练的逼真度和操作人员的成就感。
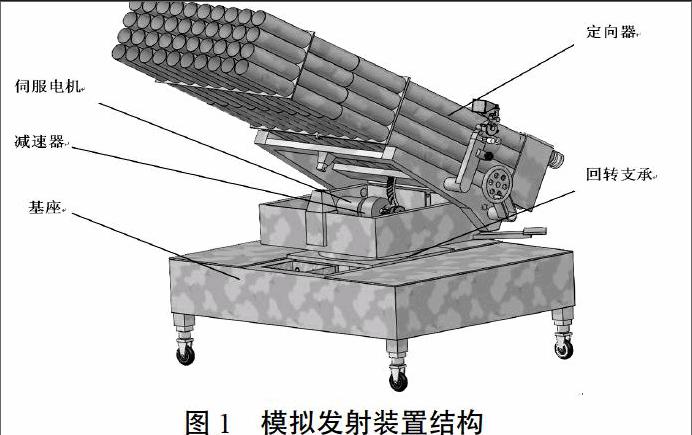
1 模拟发射装置的结构设计
在调炮操作训练过程中,模拟发射装置随着虚拟视景中的布雷车模型同步动作,其机械结构、运动轨迹与实装大致相同。模拟训练器利用PVC材料加工制成4×10轻质火箭发射定向器,并将其安装在回转座圈上;选用Sentron公司13XMB150B系列的伺服电机作为高低/方向调炮的驱动元件;选用了配套的伺服驱动器、多轴运动控制卡、行星减速器等硬件设备,实现了高/低方向两个自由度的运动控制。模拟发射装置结构如图1所示。
2 模拟发射装置控制方案的比较
模拟发射装置伺服控制系统根据主控单元仿真软件中设置的诸元参数赋予定向器相应的射向和射角。在调炮过程中,模拟发射装置的运动轨迹与三维视景中虚拟布雷车同步,因此,伺服控制系统需对执行电机的位置、速度、加速度等参数实时控制。
常用的伺服控制策略一般有2种,分别以单片机和运动控制卡为核心,并根据上位机的输入信号产生控制脉冲,经过电机驱动器的隔离和放大处理,最终实现对伺服电机的精确控制。基于单片机的运动控制器如图2所示,基于控制卡的运动控制器如图3所示。
传统的电机控制系统利用单片机采集模拟输入信号,并对信号波形进行滤波、整流、隔离和放大,经过A/D电路转换为可供计算机读取的数字信号,由上位机对数据进行计算和存储,最终输出模拟控制信号。但基于单片机技术的控制方案具有局限性,比如受到单片机片内部资源的限制,系统时钟频率较低、采样速度慢,难以满足实时控制系统的要求;硬件线路较为复杂,电路设计工作烦琐,系统开发后的元器件难以更换和升级,利用汇编、C51等语言开发控制程序的难度较大、效率较低。传统伺服控制系统如图4所示。
本文研究的伺服控制策略以运动控制卡为核心,基于LabVIEW Softmotion Module编制上位机控制软件,计算机只负责完成人机数据交互和系统监控等任务,CPU的负担大大减轻。运动控制卡基于实时系统(RTOS),可更好地满足运动控制系统的实时性要求,实现对运动轨迹任意点的精确控制。伺服控制系统可驱动单台电机,也可以将多台电机组成空间向量控制,充分利用了LabVIEW的强大功能和计算机的资源优势。同时,还降低了开发成本,提高了系统的灵活性。因此,“运动控制卡+PC机”的控制方案具有明显的技术优势。
如图5所示,上位机通过PCI总线对运动控制卡发送控制指令,包括位置、速度和加速度等参数信息;运动控制卡根据接收到的命令输出一组脉冲序列,脉冲的数量、频率和变化速率分别代表伺服电机的转动角度、转动速度和加减速等特性;伺服驱动器根据接收到的脉冲信号确定运动终点位置,并将终点位置值与轴端光电编码器反馈信号进行比较,其差值就是电机当前的位置误差;驱动器利用PID控制算法产生电机速度信号,从而调节伺服电机的运转速度。
3 伺服控制系统硬件的实现
模拟发射装置基于模块化的硬件设备构建伺服控制系统,避免了硬件系统底层驱动的开发,实现了高效的系统环境,完成了对伺服电机精确定位、多轴同步和加减速等运动特性的实时控制。
模拟发射装置伺服控制系统的硬件设备包括PC机、运动控制卡、伺服驱动器和执行电机。运动控制卡采用通用PCI总线接口与上位机连接。下面以驱动器为中间节点,详细介绍伺服控制系统硬件的工作原理。
3.1 驱动器与运动控制卡的连接
TS0150C32驱动器控制信号有2种输入方式:①CW与CCW端口分别输入正转、反转脉冲;②CW端口输入脉冲信号,D端口输入方向信号。具体如图6所示。
模拟发射装置选用方案二所示的脉冲/方向控制方式,CW/D端口选用共阳极接法,如图7所示。如果CW/D端口为高电平,则发光二极管两端电压相同,脉冲信号停止发送。NI PCI7342运动控制卡+5 V输出电压连接驱动器的控制脉冲输入正极CW和方向输入正极D+,运动控制卡控制脉冲接口、方向信号接口连接驱动器控制脉冲输入负极CCW和方向信号负极D-。
为了控制驱动器的工作使能状态,将控制卡的I/O口IN1连接至驱动器使能输入端EN-。该I/O口同样采用共阳极接法,EN+连接至+5 V电源。如果IN1为低电平,则使能回路导通,驱动器暂停工作。
3.2 驱动器与伺服电机的连接
驱动器支持CAN、RS485和RS232等总线通信方式,利用CN1通讯端子与上位机进行数据交互。输入输出端子CN2的U,V,W和FG引脚分别连接伺服电机的红、黄、蓝、绿端子,即交流电的3根相线和地线;编码器接口CN3通过接插件与电机轴端编码器的A+、A-、B+、B-相连,输出脉冲信号和方向控制信号;由于TS0150C32驱动器内部没有再生制动电阻,所以,要在端子P,B之间外接,否则会导致制动电阻发热,甚至烧毁驱动器。TS0150C32驱动器与伺服电机的接线方式如图8所示。
3.3 速度控制模拟量输入端口接线
手动调炮时,模拟发射装置通过电动手轮输出模拟控制信号,驱动定向器的2台伺服电机运动。这是伺服驱动器采用速度控制模式的重要原因之一,TS0150C32驱动器可通过外部输入模拟量控制速度和转矩。电动手轮内部等效为一个可调电阻,根据转动角度的大小,输出0~10 V连续变化的控制电压,接入驱动器的16引脚,经过驱动器内部电路放大处理后,可作为伺服电机的速度控制信号。
3.4 伺服系统的可靠性设计
TS0150C32驱动器端口利用光电耦合器6N173进行隔离保护,抑制尖峰脉冲与高频噪声的干扰,防止运动控制卡和驱动器内部电路被烧毁。控制脉冲将单端信号转化为差分信号,提高了信噪比。模拟发射装置硬件系统选用带有屏蔽功能的双绞线作为传输介质,主要控制元件共地连接,降低了电磁干扰和静电感应,进一步提高了系统的可靠性和抗干扰性。为了保证伺服系统的稳定工作,高品质的伺服电源至关重要。模拟发射装置对驱动器和控制系统分别供电,在布线工作前进行系统电磁兼容设计,前端电磁接触器、进线断路器、噪声滤波器和进线电抗器的特性参数与系统负载匹配。伺服系统的硬件连接如图10所示。
4 伺服控制系统上位机软件的开发
LabVIEW Softmotion Module是NI公司推出的单轴和多轴运动控制程序开发平台,以图形化的方式编写的应用软件,可灵活使用丰富的API程序接口,按照协议与其他应用程序通信,最终实现对速度、位置和转矩的控制。
模拟发射装置的轨迹参数通过主控单元仿真软件设置,运动控制程序作为独立的子VI读取高低角/方向角等运动参数。在LabVIEW Soft Motion环境中配置了2轴的速度、加速度等运动特性,可通过PCI总线输出控制信号。如图11所示,前面板主要包括参数配置模块、错误输出模块、运动轨迹显示模块三部分。
5 结束语
瞄准和发射是该类型火箭布雷车完成作业的关键,模拟发射装置的设计直接影响着训练效果。本文采用“PC机+运动控制卡”的控制策略,建立了上位机—运动控制卡—驱动器—执行电机硬件系统,开发了基于LabVIEW Softmotion Module的上位机控制软件,并利用NI模块化的软、硬件系统提高了模拟发射装置的灵活性和可靠性,逼真地模拟了该类型火箭布雷车的发射过程,这对我军战斗力的早日成形具有重大意义。
参考文献
[1]王明时.现代传感器技术[M].北京:电子工业出版社,1995.
[2]黄立培.电动机控制[M].北京:清华大学出版社,2003.
[3]梁永忠.基于LabVIEW的多轴运动控制器应用研究[D].广州:广东工业大学,2010.
[4]Raymond E Chalmers.Open architerture CNC continue advancing [J].Manufact-uring Engineering,2001,127(1):49-52.
[5]张凯,周陬,郭栋.LabVIEW虚拟仪器工程设计与开发[M].北京:国防工业出版社,2004.
作者简介:王朴,硕士研究生,现工作于解放军理工大学野战工程学院军事装备学教研中心。李焕良,副教授,现工作于解放军理工大学野战工程学院军事装备学教研中心。
〔编辑:张思楠〕
Abstract: We developed a rocket minelaying vehicle simulator launcher servo control technology based on the. The device using the software and hardware system of “PC + motion control card” control strategy, established the PC - motion control card, drive executive motor, hardware system, the development of the control software of PC based on LabVIEW robot was done by making module, and using Ni modular improves the model intends to launch the flexibility and reliability of the device.
Key words: servo control; rocket launcher; minelayer; LabVIEW
