基于Carsim轻型货车EPS系统控制策略研究
2021-11-18商显赫林幕义
商显赫,林幕义,2,童 亮,2,马 彬,2
(1. 北京信息科技大学机电工程学院,北京 100192;2. 北京电动车辆协同创新中心,北京 100192)
1 引言
电动助力转向系统是随着电控技术的进步和消费者对驾驶舒适性要求的提高,逐渐兴起的一种辅助驾驶系统,对于提高转向操纵特性、稳定性和安全可靠性则成为了电动助力转向系统的研究热点。对于提高转向操纵稳定性,文献[1-3]通过设计模糊自适应PID控制策略来提高系统的反应时间和性能,在一定程度上提高了汽车整体性能,但也存在不足,都是建立汽车二自由度模型,然后进行对控制策略的模型验证,由于汽车系统的复杂性,这种建模方式不能完全与实车模型相契合,汽车各参数的变化对转向系统的影响与实车存在一定的误差,需要一种简单而且比较精准的数学模型来描述汽车整体情况对转向系统的影响,文献[4]利用Carsim软件完成整车模型的搭建,并进行了硬件在环验证,但是并没有对所搭建的联合模型进行有效性验证,与Carsim自带转向系统的整车模型存在一定的误差。另外,国内外学者对于汽车电动助力转向系统的研究主要是针对使用齿轮齿条式转向器的车型,而对于使用循环球式转向器的轻型卡车研究较少。
控制策略的制定是为了控制电机在汽车不同工况下输出和驾驶员相互配合的助力转矩,提高驾驶的稳定性和舒适性,由于汽车行驶工况时刻在变动,传统PID控制策略不能与环境变化自适应改变,所以采用模糊自适应PID控制策略来避开传统PID控制策略的短板,整车模型由Carsim和Matlab/Simulink搭建,并和Carsim自带循环球式舵机的轻型货车整车模型对比,验证了联合模型的有效性,最后对两种控制策略进行同工况仿真分析,验证了模糊自适应PID比传统PID控制策略具有更好的控制效果[4]。
2 电动助力转向系统建模
2.1 电动助力转向系统的建模
所研究轻型货车采用的传动效率较高的循环球式转向器,用数学公式对循环球式转向器建模存在一定复杂性,如果把绕主销的回正力矩等效到转向器的螺杆上,循环球式转向器看作一个具有惯性的阻尼原件,通过这种方式,电动助力转向系统的建模可以分为转向柱上轴、转向柱下轴和助力电机组成的数学模型。
转向柱上轴模型包括转向盘转向柱模型和扭矩传感器模型,如等式(1)和(2)所示

(1)
Ts=Ks(θh-Ts)
(2)
转向柱下轴模型为

(3)
(4)
δ=isθs
(5)
助电机的数学模型为
(6)

(7)
Tm=KaI
(8)
θm=imθs
(9)
式中:分Jh、Js、Jm别为转向盘与转向柱上轴的转动惯量、等效到转向器螺杆上的转动惯量、电机的转动惯量;Ch、Cs、Cm分别为转向盘与转向柱上轴的阻尼、等效到转向器螺杆上的阻尼、电机的阻尼;θh、θs、θm、δ分别为转向盘转角、转向柱下轴转角、电机转角、车轮转角;Th、Ts、Tm、Tf、Mr分别为方向盘扭矩、扭矩传感器扭矩、电机扭矩、相当于舵机螺杆的扭矩和转向阻力扭矩;Ks、Ke、Ka分别为转向柱刚度系数、反电动势常数、电磁转矩系数;is、im分别为转向器传动比、减速机构传动比[5-8]。
2.2 联合仿真模型的验证
对于所研究轻型的货车,通过Carsim软件完成整车模型的建模,为了使转向盘转矩、电机助力转矩和回正力矩能够与控制策略有效的联合起来,需要把转向盘和循环球式转向器模型通过Matlab/Simulink建立,通过不断在线调整转向盘和转向器模型的惯性阻尼参数,使所搭建的联合模型和Carsim自带转向系统的整车模型接近一致,仿真设置转向盘在1秒时输入力矩为7N·m,5秒时撤销转向盘的阶跃输入,如图1所示,以0 km/h和30 km/h的车速获得方向盘转角随着方向盘输入信号作用时间变化的对应关系。
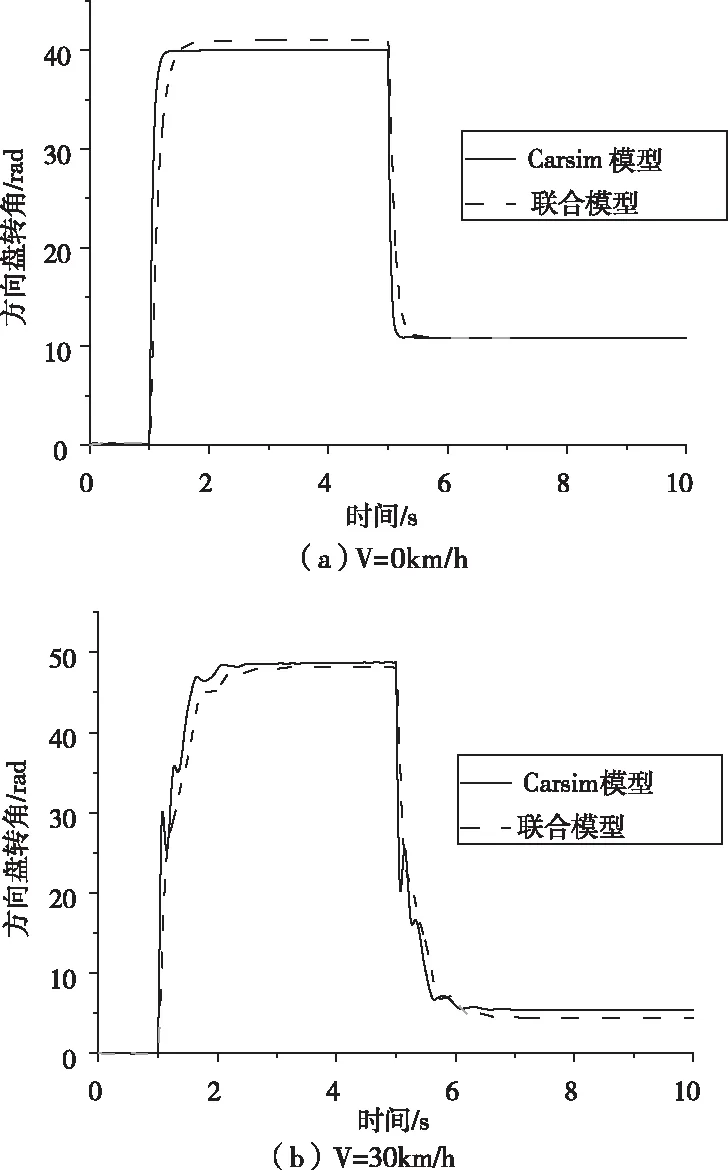
图1 不同车速时方向盘角度的对应关系
通过仿真结果可以得到,两种模型转向盘转角都随着转向盘输入力矩的改变而发生变化,具有相同的响应速度与变化范围,当方向盘扭矩被取消时,由于回正力矩的影响,方向盘转角在0 km/h和30 km/h时分别回转30度和40度,回正角度在不同速时存在一定的差异,表明回正力矩的大小与车速有关,同时,通过仿真结果可以看出,即使车速变化,方向盘始终不能够回到中间位置,这是由于转向系存在摩擦阻力,抵消了一部分回正力矩,所以转向盘转角不能回转到原点。结果表明,通过Matlab/Simulink建立的机械转向系统模型,能够和Carsim自身转向系的模型达到较高的相似度,通过此过程,为下一步电动助力转向系统控制策略的研究,提供了较为精准的整车模型。
3 电动助力特性曲线的选择
助力特性曲线的设计也是影响转向操纵特性的一个因素,它决定驾驶员在转向时对转动方向盘灵活和沉重的主观评价,通过采用电流控制的方法,助力特性曲线输出则为目标电流值,仿真中为了容易观测电流的变化情况,因此采用简单易设计的直线型助力特性曲线。
设计助力特性曲线无助力区由Td0大小决定,一般取Td0=1N·m,仿真中设置方向盘转矩Tdmax=7N·m时,电机将提供最大的扭矩输出,根据汽车原地转向的半经验公式[9-11]
(10)
式中:f为轮胎与路面间的滑动摩擦系数;G1为汽车前轴负荷;p为轮胎气压。
结合式(4),得到等效到转向轴上阻力矩Tf,根据式(11)
(11)
得到助力电机最大助力电流Imax=30A,电机的助力扭矩与汽车车速有关,所研究的目标车型的最高时速为90 km/h,此时,电机辅助转矩为0 N·m,辅助电流为0 A,并且不同速度下的辅助电流的变化被认为是线性的,于是设计出目标车型的助力特性曲线,如图2所示。
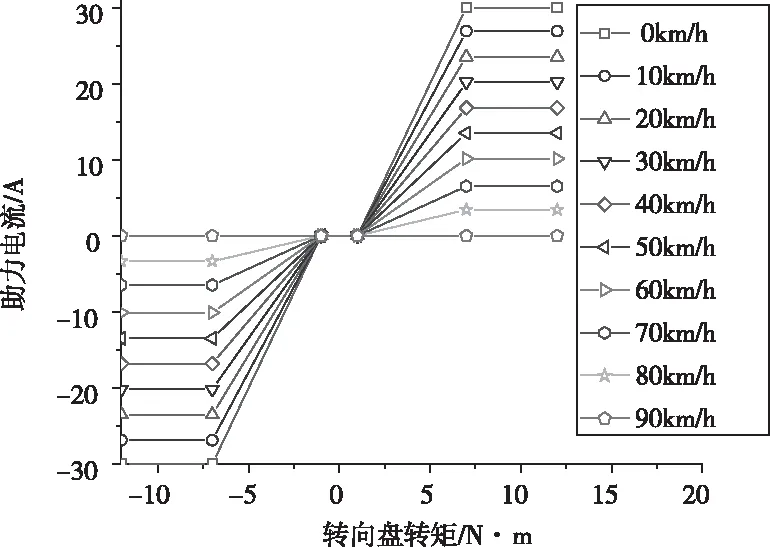
图2 电动助力特性曲线图
4 电动助力转向系统控制策略研究
4.1 助力模式下的传统PID控制策略
PID 控制策略通过调节Kp、Ki、Kd的参数值,来控制电机电流输出特性,抵消电机负载,进而实现助力控制,PID控制器的数学描述为

(12)

4.2 助力模式下的模糊自适应PID控制策略
由于常规PID的参数值在调试完之后不会再变动,只能满足某一特定工况下的调整需求,而模糊自适应PID控制策略,通过模糊规则对 PID控制器中的参数进行实时自适应调节,可以实现随着外部环境工况的变动自我更新,达到理想的控制效果,自适应模糊控制器把目标电流I(t)和助力电机电流i(t)的差值e(t)和差值变化率ec(t)为控制策略输入,经过量化输出控制量ΔKp、ΔKi、ΔKd,最后经过模糊PID控制器得到控制电压,搭建的一个完整的模糊PID 控制策略结构如图3 所示[12-14]。
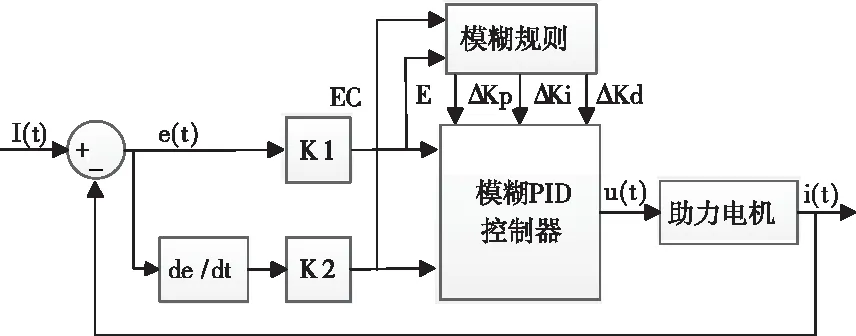
图3 模糊PID 控制策略结构图
模糊自适应PID控制器的输入e、ec和输出ΔKp、ΔKi、ΔKd的论域分别为[-6,6]、[-2000,2000]、[-6,6]、[-0.1,0.1]、[0,0.001],在确定量化因子和量化等级后,获得每个语言变量的模糊子集,即{NB,NM,NS,ZE,PS,PM,PB},依次表示为负大、负中、负小、零、正小、正中、正大。
根据PID参数的调整规则和电动助力转向系统的特点,可以设计以下模糊规则,如表1~3所示。
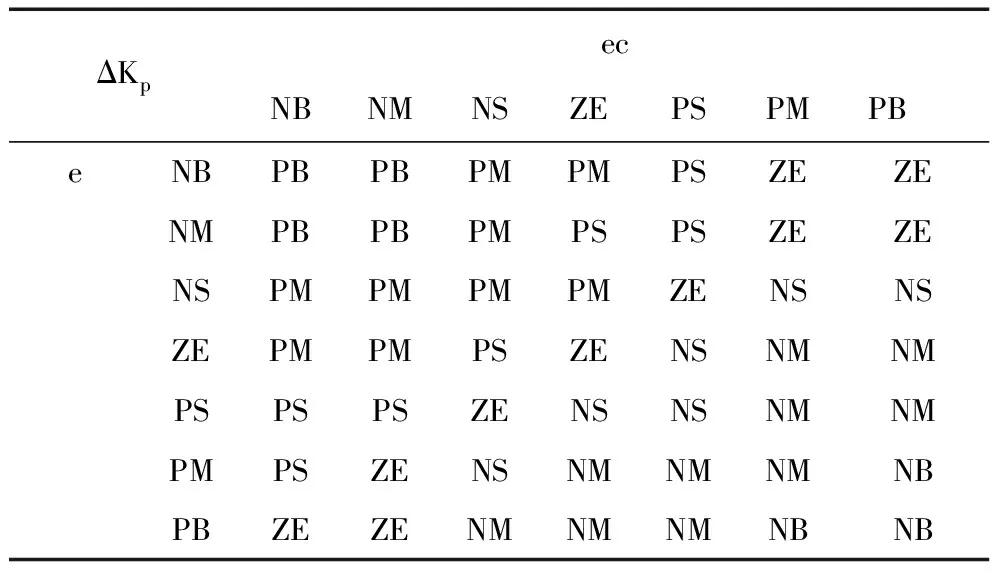
表1 ΔKp模糊控制规则表
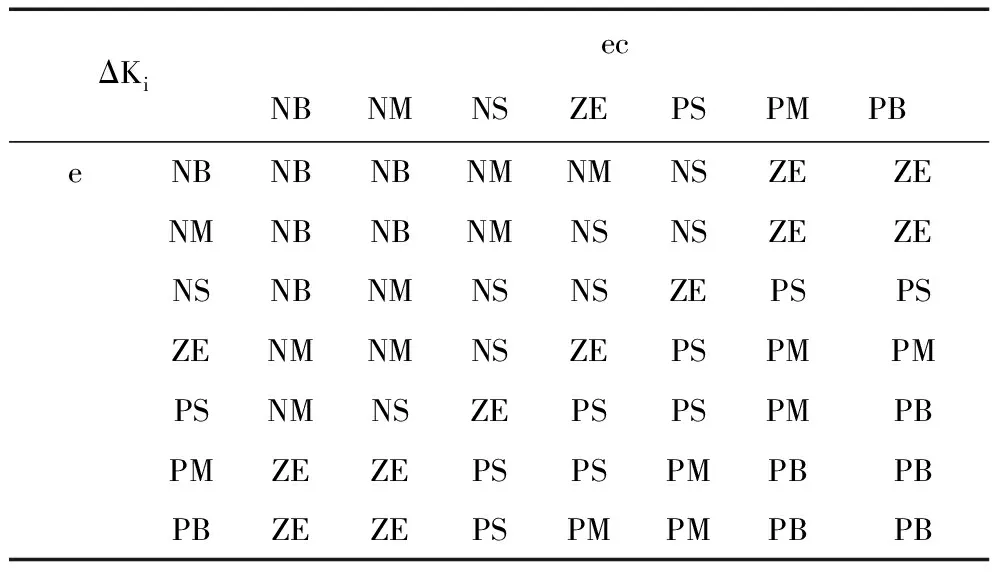
表2 ΔKi模糊控制规则表
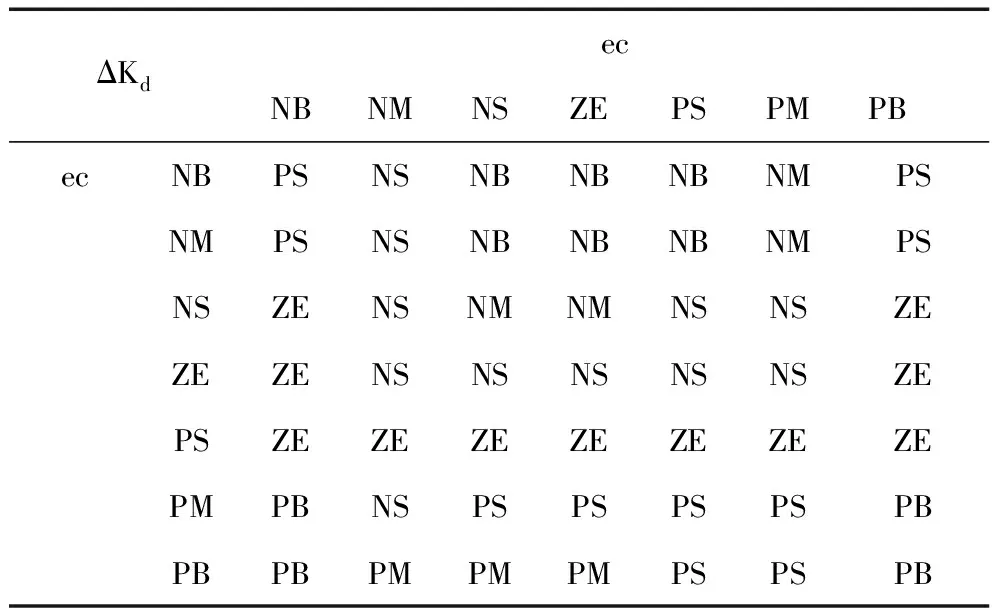
表3 ΔKd模糊控制规则表
5 电动助力转向系统仿真与分析
5.1 联合仿真模型
对于建立的模糊自适应控制器如图4所示,助力特性曲线通过车速和转矩传感器扭矩来确定输出目标电流值,经过和电机实际的电流做差值之后,输入到控制器,PID 调节以获得电机的控制电压,控制电压通过直流斩波(PWM)技术的方式来实现,PWM模块为延迟环节,其传递函数为
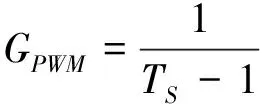
(13)
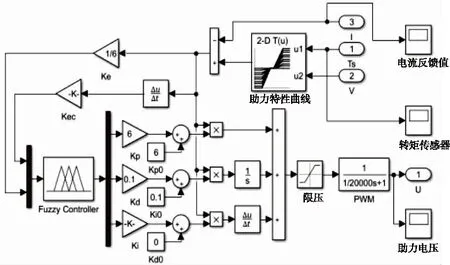
图4 模糊PID自适应控制器模型
根据建立数学模型搭建Matlab/simulink仿真模型,通过封装各个子模块,得到在助力模式下电动助力转向系统的联合仿真模型,如图5所示。
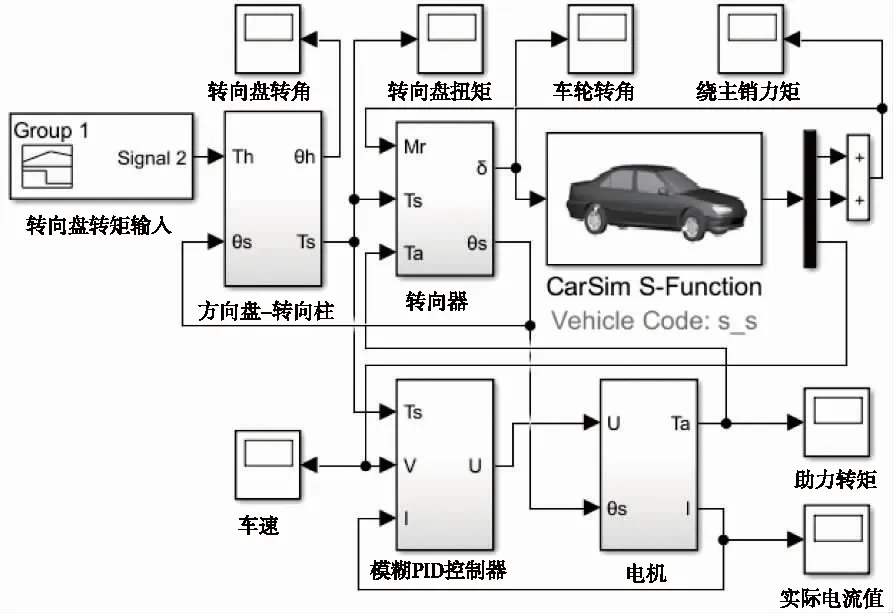
图5 助力模式下EPS系统联合仿真模型
在联合仿真模型中,Carsim的输入是两个前轮转角,左右主销的扭矩是Carsim的输出,由于汽车左右轮转角与转向器摇臂轴转角的关系是非线性的,左右车轮转角不同,绕主销的力矩将会变化,为了能够更加真实的反应绕主销力矩的变化,根据Carsim中的数据,绘制出了转向器摇臂轴转角和左右车轮转角之间的关系,如图6所示。
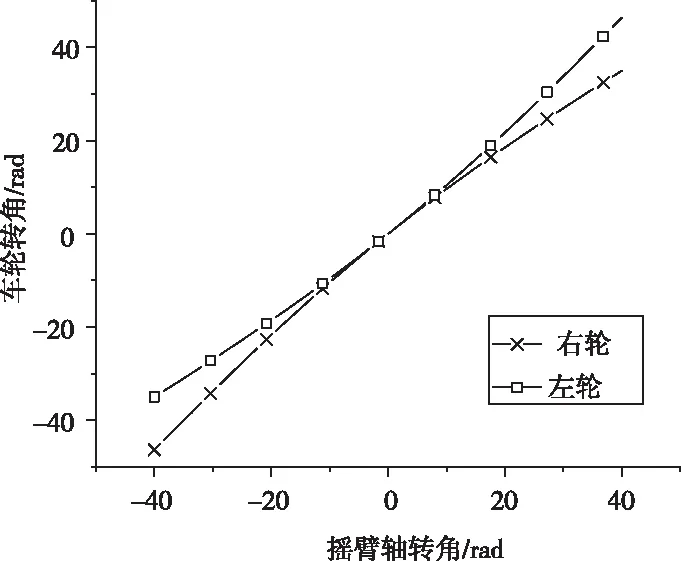
图6 转向摇臂转角与左右车轮转角的关系
5.2 两种控制策略对比分析
利用搭建好的两种控制策略的联合仿真模型,进行仿真对比分析。当工作条件设定为0.5秒时,方向盘上施加3N·m的转矩,第3秒取消方向盘扭矩,模拟的车辆速度分别为30 km/h、60 km/h,获得了用于辅助电动机输出的两种控制策略的理想目标电流值和实际电流输出,如图7所示。
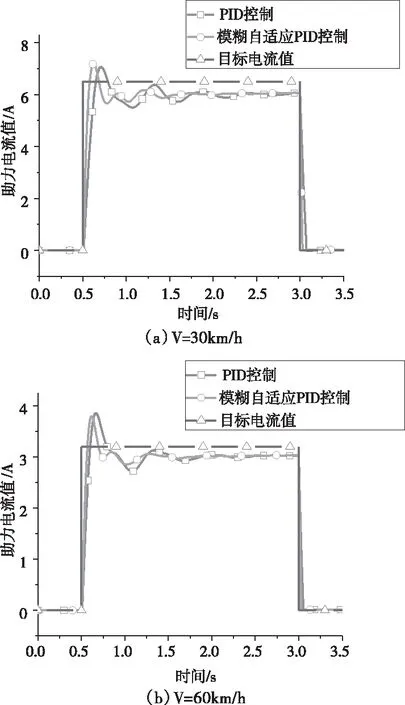
图7 不同控制策略电机电流特性
当车速为0 km/h时,通过反复试验来调节PID控制策略Kp、Ki、Kd的值分别为6、0.1和0时,系统控制效果最佳。通过仿真结果可以得到,两种控制策略控制的实际电流值都略小于目标电流值,模拟车速为30 km/h时,PID控制策略的控制电流上升时间为0.646秒,超调量为10.1%,此时模糊自适应PID控制策略的Kp、Ki、Kd参数分别为6.05、0.135和0,控制电流上升时间为0.576秒,超调量为12.3%;当车速为60km/h时, PID控制策略的控制电流上升时间为0.6秒,超调量为22.8%,此时模糊自适应PID控制策略的Kp、Ki、Kd参数分别为5.57、0.145和0,控制电流上升时间为0.565秒,超调量为21%。结果表明采用模糊PID 控制策略的EPS 系统助力特性具有超调量较小、调整时间短的特点,可以很好地满足不同车速的助力转向需要。
为了验证在助力模式下,两种控制策略的助力效果,通过仿真进行转向轻便性试验,给定车速30 km/h,转向盘(-5-5)N·m的线性变化的力矩,得到三种模式转向盘转矩和转角的关系,如图8所示。
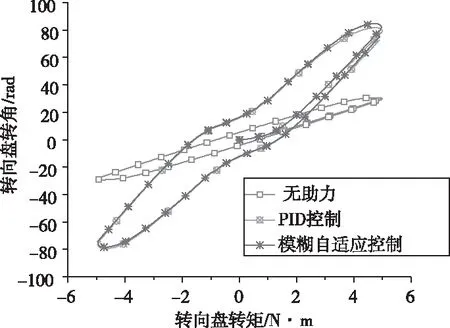
图8 不同控制策略的转向盘转矩和转角的关系
通过仿真结果可以得出结论,当没有电机提供助力时转向比较费力,当有电机助力时,当相同的扭矩施加到方向盘上时,会比无助力时能够达到更大的转角,转向轻便性提高;两种控制策略都能够达到基本相同的助力效果,但是从图像可以看出,左右转向施加同样大小的转向盘力矩,模糊自适应PID控制策略比传统PID控制策略的方向盘转角对称度要好,展现了更好的适应性。
6 结论
1)以轻型货车的转向系统作为研究对象,采用Carsim软件解决模型建模不精确的问题,并结合Matlab/Simulink建立的转向系机械模型联合仿真,验证了所搭建整车联合模型的有效性;
2)搭建传统PID和模糊自适应PID控制策略,结合建立的整车联合模型进行相同工况的仿真,验证了节Kp、Ki、Kd参数的变化对系统存在影响,模糊自适应PID比常规PID有着更快的响应速度;
3)通过转向轻便型试验,验证了在助力模式下,模糊自适应PID控制策略能达到实现转向轻便的效果,而且在施加相同大小方向盘转矩进行左右转向时,转向盘左右转角的对称度比传统PID控制策略要好,进一步证明了模糊自适应PID控制策略的有效性。