基于FPSO的小天体着陆系统陆标选取方法
2021-11-18冀红霞雷拥军
冀红霞,宗 红,雷拥军,2
(1. 北京控制工程研究所,北京 100190;2. 空间智能控制技术重点实验室,北京 100190)
1 引言
采用陆标图像信息的小天体着陆自主导航方法是实现未来深空探测精确着陆任务的重要手段之一。近年来,采用陆标图像信息的小天体着陆自主导航方法的研究受到越来越多的关注。目前对于这一类导航方法的研究大都是在已知陆标位置信息的假设下进行的。着陆器通过将下降图像中提取的陆标与探测器事先存储的包含陆标位置信息的全局地图进行匹配从而获得下降图像中陆标的位置信息,进而利用这些已知陆标的位置信息结合其图像测量信息计算着陆器的导航信息[1,2],因此陆标的分布数量与分布结构对自主导航的精度有很大的影响。目前来看,采用陆标图像信息的行星着陆自主导航方法大都没有考虑导航陆标的选取问题。然而,在移动机器人导航领域,研究人员从多个方面对陆标选取问题进行了研究。文献[3,4,5]则从陆标的空间构型对移动机器人位姿估计精度的影响方面研究了导航陆标的选取问题。文献[4]提出了一种利用粒子群算法来规划多陆标情况下的机器人导航。
粒子群优化算法(Particle Swarm Optimizer,PSO)[6]是Kennedy和Eberhart于1995年提出的一种群体智能仿生算法,在解决一些典型的函数优化问题时,能够取得比较好的优化结果。虽然粒子群算法具有容易实现、计算简单、收敛快、鲁棒性好等优点,但是后期容易陷入局部最优解,收敛效率低。
很多学者通过一些方法和手段来调整惯性权值[7,8],使算法在全局搜索和精细搜索之间达到平衡,但改进算法只是单纯地在整个区间上使用一次函数、二次函数甚至更高次函数,以及正(余)弦函数等三角函数、各种指数和对数形式的函数,构造出非常复杂的减函数。增加计算机运算量,降低改进算法的优化速度。
针对粒子群算法容易陷入局部最优的问题,提出一种模糊逻辑规则的粒子群(Fuzzy Particle Swarm Optimizer, FPSO)算法,采用模糊逻辑规则对粒子群算法中惯性权值进行动态调整,以平衡全局搜索速度和局部搜索速度,并以陆标的空间几何精度因子(GDOP)为适应度值以提高导航精度,学习选取使陆标构型的GDOP值最小的陆标集值作为导航观测信息,通过仿真验证分析选取不同导航陆标数据点对系统导航精度的影响。
2 小天体着陆自主视觉导航系统
小天体探测器在着陆过程中通过相机获取小天体表面图像,采用图像匹配算法提取陆标特征点作为后续导航的观测信息,图1为采用陆标提取方法的小天体着陆自主导航系统流程图,首先采用角点检测算法检测下降图像中的特征点作为陆标,对下降图像进行尺度估计和尺度变换,对提取出的角点信息特征描述后进行初始匹配,并剔除初始样本中不符合几何特性的部分外点,最后与数据库中存储的全局图像进行匹配,输出匹配的陆标点位置信息,参与后续的导航滤波解算。

图1 小天体着陆自主导航系统流程图
2.1 小天体探测器运动学模型
利用惯性敏感器测量建立探测器着陆运动学方程为

(1)

Ω(ω)定义如下
其中

2.2 小天体探测器测量模型
2.2.1 IMU测量模型
假设IMU固连于着陆器体坐标系,可直接敏感着陆器相对于惯性空间的角速度和非引力加速度。则加速度计和陀螺的测量模型分别表示为

(2)
其中,ba和bw分别为加速度计零偏和陀螺零偏,a为除引力外所有作用于探测器上的合力产生的加速度:na、nw分别是加速度计和陀螺测量噪声。
则导航测量方程为

探测器在着陆点固连坐标系下的状态参数为(r,q),着陆点固连坐标系下第i个特征点的位置矢量为Lpi, 探测器到第i个特征点的位置矢量在相机坐标系下的表示为

(3)
假设光学导航相机模型为理想的小孔成像模型,由射影变换可得

(4)

是的,他觉得自己会下地狱。云浮人认为,每一个命丧野兽口中的人,灵魂都已被污染,再也无法升上天空飞翔。他在心中发出一声悲叹,自己与任何一个族人相比,都更加渴望天空,然而到头来,却终究是下了地狱。

(5)
2.2.3 测速敏感器测量模型
测速敏感器输出的相对速度的测量方程如下:

(6)
对于导航相机,以特征点在像平面的位置为观测量,对于特征点由式(5)可得观测方程为
中华传统文化是世界文化之林中的一道独特风景,在宽广辽阔的祖国大地上,风情各异的地方节庆对于传承丰富多样的传统文化,具有突出的作用。在国家大力进行社会主义文化建设之际,深入探讨地方节庆对传统文化的传承价值,是非常有必要和有意义的。笔者拟以海南军坡节为例,对这一问题进行深入探讨。
3 FPSO的导航陆标选取
粒子群算法(PSO)初始化为一群数量为N的随机粒子(随机解),在D维空间中通过重复迭代,更新自身的位置以搜索适应度值的最优解。在每次迭代中,粒子通过2个“极值”来更新自己的速度和位置:一个是粒子自身目前所找到的最优解,即个体极值;另一个是整个粒子目前找到的最优解,即全局极值。粒子i(i=1,2,…,N)在第j(j=1,2,…,D)维的速度vij和位置xij按如下格式进行更新。

(7)
式中,w为非负数,成为惯性权值(惯性因子),描述了粒子对之前速度的“继承”;c1和c2为非负常数,称为学习因子(加速因子),体现了粒子的社会性,即粒子向全局最优粒子学习的特性;r1和r2为(0,1)之间的随机数;pi=(pi1,pi2,…,piD)表示粒子i的个体极值所在位置;pg=(pg1,pg2,…,pgD)表示所有粒子的全局极值所在位置。
其中,H为导航滤波器的观测矩阵。
在粒子群算法中,每个优化问题的潜在解都是在搜索空间中的粒子,所有粒子都有一个被优化的函数决定的适应度值(fitness value),每个粒子还有一个速度决定其寻优的方向和距离。
3.1 模糊逻辑规则惯性权值的选取
惯性权值表示粒子对其原始速度的继承状况,控制其取值大小,可调节PSO算法的全局与局部寻优能力。w值较大,全局寻优能力强,局部寻优能力弱,反之,则局部寻优能力增强,而全局寻优能力。因此在算法进行过程中,通过一些方法来调整惯性权值,使算法在全局搜索和精细搜索之间达到平衡。
应用绿色建筑设计的理念最重要的就是选用节能的设计方法进行建筑设计,首先就要注重建筑的朝向角度,这是房屋设计的重点,需要结合节能技术进行有效分析。目前,设计者要考虑和建筑的高低以及使用功能的不同,不同功能建筑所需要的日照时间是不一样,所以设计者要合理把控楼体之间的关系,具体可以对楼间距、日照时间、角度等进行科学的计算,还要考虑到建筑所在地理位置的经纬度和太阳高度角及方位角的问题,从而使大部分的房屋能够得到充足的日照,尽量设计出南北通透的房屋。
为了使得PSO算法在迭代计算的前期有较好的全局搜索能力而后期具有较好的局部搜索能力,设计一个具有模糊逻辑规则控制PSO算法参数的FPSO(Fuzzy PSO),以适应度本次与上次之差和迭代次数作为输入变量,将惯性权值w作为输出变量。为了便于计算,对迭代次数与适应度差值这2个模糊系统的输入变量进行处理。
在模糊系统中两个模糊输入变量K1和K2与模糊输出变量w分别由3个三角形隶属度函数与5个三角形隶属度函数确定,即将模糊输入的范围平均分成3个模糊集(L:低;M:中;H:高),输出的范围平均分成5个模糊集(L:低;M:中;H:高;ML:中低;MH:中高),分别如图2中a)、b)所示。
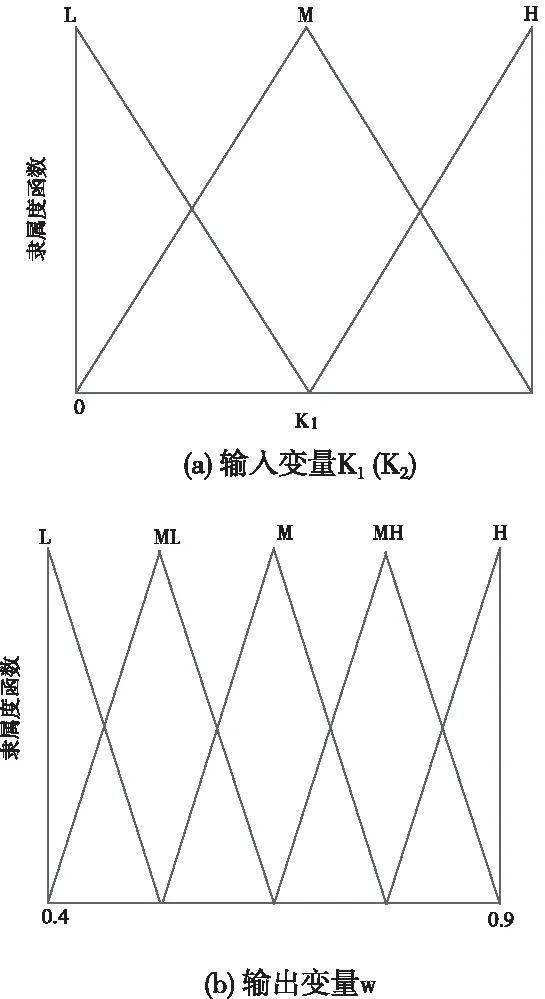
图2 隶属度函数
输入变量K1和K2如式(8)和(9)所示
随着我国政府会计改革的不断深入推进,2017年10月24日,财政部印发《政府会计制度—行政事业单位会计科目和报表》(财会〔2017〕25号,以下简称《政府会计制度》),要求自2019年1月1日起全面施行,并鼓励行政事业单位提前执行。《政府会计制度》构建了“具备财务会计与预算会计双重功能,实现财务会计与预算会计适度分离并相互衔接”的全新政府会计核算模式,对会计科目的设置使用和报表格式及编制进行了详细说明,同时在附录中列示了主要业务和事项账务处理举例。
K1=k/kmax
(8)

(9)
导航系统状态包括探测器当前位置、速度和姿态以及成像时刻探测器位置和姿态,即
结合粒子群算法在短暂的迭代前期收敛速度快,而在漫长的迭代后期则基本陷于停滞状态以及系统迭代总体收敛的特点,分析输入与输出之间的关系如下:
1) 在迭代前期即K1值较小时,取w较大的值以利于全局搜索,在迭代后期即K2值较大时。取w较小的值以利于局部搜索;
2) 当K2<0时,说明此次迭代总体收敛,且K2越小,w越大,此时全局搜索能力强;当K2>0时,说明此次迭代发散,且K2越大,w越小,此时局部搜索能力强。
根据上述输入输出参数关系,制定模糊逻辑规则如表1所示。

表1 模糊逻辑规则
在表1中,每个规则都是一个“if…then…”的形式。对于不同的问题,可以合理选取w的取值范围,w的取值范围为[0.4,0.9]。
3.2 空间几何精度因子适应度指标的选取
导航陆标特征点信息很大程度上决定使用陆标观测信息作为观测量的自主导航系统的精度。通常来说,当导航陆标数据库包含陆标个数越多,着陆器获得的可用于导航的测量信息就越多,相应地着陆器状态估计精度也越高,相应地着陆器精度也越高。然而,受限于着陆器上有限的存储和计算能力以及着陆过程自主导航对实时性的要求,可存储陆标数据库大小是有限的,因此,需要从所有可用陆标中选取出最优的那部分陆标组成导航陆标数据库,则导航陆标选取问题可描述为寻找既能满足系统导航性能要求又包含最少陆标个数的陆标集。
对于使用陆标选取作为观测量的小天体着陆自主导航系统,使用陆标点的空间几何精度因子(GDOP)值作为导航性能指标,在卫星导航系统D中,GDOP用于衡量导航精度的数值,它表示定位误差与空间卫星星座间的几何位置变化关系。更一般的说,是用来表示定位误差放大倍数或者是精度衰减因子。在实际情况中,陆标点组成的体积越小则GDOP的值越大。在选择陆标时要选择陆标分散在不同的位置,且在不同的区域都有分布,陆标的几何精度就会变小,从而提高导航系统的精度。
GDOP的计算公式如下

(10)
水利普查档案应该按要求建立归档文件材料的案卷和文件级目录及重要文件材料全文数据库,并依托相应的管理系统,逐步推进水利普查档案信息化管理,满足各项工作对水利普查档案的利用需求。
当陆标个数较多时,采用全局搜索方法寻找优化的导航陆标时非常困难的,因此考虑以图1中特征匹配提取出的陆标为初始点,采用模糊规则的粒子群算法,在一定的边界范围内通过选取空间精度因子(GDOP)值为适应度指标进行学习,在一定迭代周期内,更新陆标点的位置搜索使得适应度值最小的陆标点,作为导航滤波器的观测值。
4 小天体探测器自主导航算法
4.1 状态方程
式中,k为当前迭代次数,kmax为总迭代次数;fitnesscurrent为当前时刻的最优适应度值,fitnesslast为上一时刻的最优适应度值。

(11)
2.2.2 导航相机测量模型
估计状态为
提高教师素质,丰富教学内容 教师是传播知识的关键环节,具有很强的示范作用,要率先垂范,上课不使用手机,为学生树立良好的榜样。教师可以通过课程环节设计,用适当的教法解决较难课程内容,选择合适的教学方法和手段来授课,理论与实际相结合,增加课堂上的实践性、趣味性、灵活性,通过丰富课堂内容,增强课堂吸引力,让学生在一个轻松的环境中学习。教师通过自己尊重教学、课堂、学生的良好教学态度,从而去影响学生、带动学生,这种示范作用对学生具有立竿见影的效果,从而使学生上课没有时间玩手机。

(12)
系统当前误差状态方程如下

(13)
假设k时刻相机拍摄一幅图像,则状态方程xE|k和协方差PEEk|k分别扩维为xk和Pk|k
(四)防治 对于生猪霉玉米黄曲霉素中毒到目前尚无特效解毒药。临诊中仅限于对症处理并加强肝脏解毒功能。首先是立即停喂霉烂变质饲料和可疑料,其次是根据临床症状采取一些解毒措施,如应用中药轻泻,促使病猪采食后的霉饲料尽快排出体外,同时注射肌苷、柴胡保肝,用维生素E和高渗葡萄糖输液。对部分出现心力衰竭的猪只用安钠咖注射液强心。并注意控制继发感染。全天用5%板蓝根浆饮水,连饮3~5 d。饲料中添加抑霉菌素3~5 d,增加蛋白质和脂肪含量可增强猪体对黄曲霉毒素的抵抗力并减少死亡率。也可发病时用三苯甲咪唑按20 mg/kg口服,日服三次,连用数天可治疗本病。
式中
4.2 观测方程
式中,nu为测速敏感器测量噪声。
式中,vi为观测噪声,设其协方差阵为Rv。
第i时刻导航陆标pj估计观测量为

(14)
则第i时刻的观测量残差为
yi=Zi-i
(15)
测量方程为

(16)
式中
考生还应熟练掌握边叙边议的论证技巧,也即在叙述的过程中灵活自如地进行分析论证。这样的论证技巧尤其适用于考生对该论据较为熟悉而且觉得一两句话概括起来较为困难的情况。当然,边叙边议的论证技巧决不是意味着论证可以拖沓,而是将问题说得更深入透彻些,在论证过程中还是要讲求层次分明、条分缕析。
其中

对于测距测速敏感器,由(6)可得观测方程为

(17)
其中测量敏感矩阵为

其中
(2)皮带运输系统。其中进煤皮带3条(高空皮带1部,斜巷大倾角皮带1部),中煤皮带1部,矸石皮带2部,精煤皮带1部,共计7部皮带。精煤转载皮带由原煤场筛分3#皮带延伸共用。
5 仿真验证
为验证本文提出的采用粒子群算法的陆标选取导航系统的有效性和可行性,取Eros433作为目标天体进行数学仿真,小天体物理参数如表2所示。
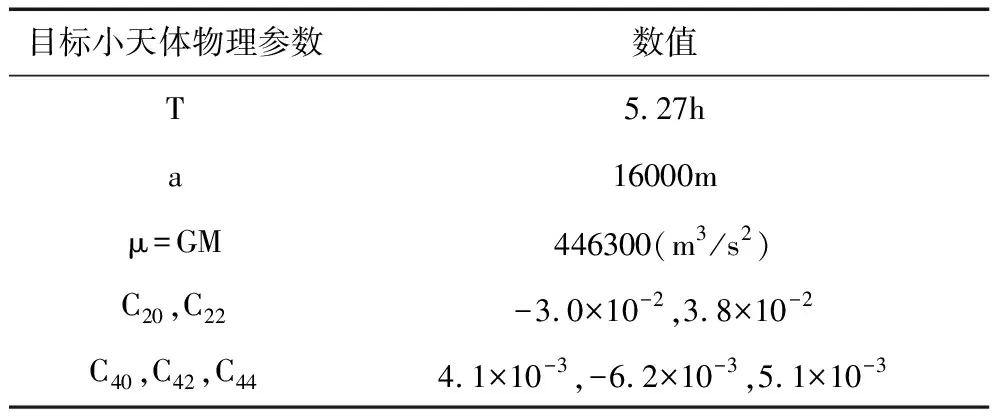
表2 仿真分析参数列表
仿真初始条件为位置各方向存在50m的随机误差,速度各方向存在1m/s随机误差,姿态各轴指向存在1°的随机误差,导航陆标位置各方向存在1m的随机误差,测速仪各方向存在0.01m/s随机误差。设导航相机焦距伪3.5mm,导航相机和测速仪以1s的采样间隔输出,图像处理精度为1个像素,仿真采用模拟陆标进行。
(1) 炭化花生壳:将洗净烘干的花生壳粉碎后放入坩埚中,加盖后置于马弗炉中进行炭化,设置升温梯度为100 ℃,间隔时间为10 min,待温度分别升至300,400,500,600和700 ℃时,继续炭化2 h,随后冷却至室温取出,称重,备用。
1)适应度收敛分析
(4)基于GIS的选线工作辅助系统,其可靠性与计算结果准确性及现有数据信息有直接关系,同时也会受到用户自身选择与判断的影响。只有正确的选择与判断,才能充分发挥工具应有的作用和效果。
利用FPSO算法计算陆标优化时,首先根据式(21)得到GDOP值作为适应度指标,并将式(21)作为适应度函数,通过FPSO算法对该适应度函数进行逐次迭代寻优。FPSO算法的计算步骤与2.1节PSO算法相同,只是通过模糊系统对惯性权值w进行动态调整,通过迭代寻优,最后得到的全局最优解即为适应度指标,所对应的陆标位置为陆标最优值。

图3 适应度收敛曲线
从图3的收敛度曲线可看出,FPSO计算最终的适应度值收敛最小值优于PSO算法。
2)导航精度分析
仿真情况1:全部陆标的300个点

图4 仿真情况1滤波精度
仿真情况2:全部陆标中的前200个

图5 仿真情况2滤波精度
仿真情况3:随机选取的100个陆标

图6 仿真情况3滤波精度
仿真情况4:FPSO选取的陆标

图7 仿真情况4滤波精度

表3 不同陆标个数下蒙特卡罗导航误差
从图4~图7及表3可看出,FPSO生成的陆标(仿真情况4)在参与导航解算时相较仿真情况一滤波精度提高了35.6%,相较仿真情况三消耗的时间减少了47.8%,这是由于FPSO智能选取陆标点时以GDOP值为适应度值,不断迭代生成GDOP值最优的陆标点,且可以使用较少的粒子数参与导航解算,减少导航运算的时间。
我国制定了很多关于基层畜牧兽医技术管理的法律法规,而且由于基层的设施条件存在欠缺,就使得工作落实非常困难。而我国正面临着经济体制改革的时期,畜牧业在这个过程中也面临着多层次的体制改革。目前也有部分地区实现了良好的规划和发展,但相对来说这些情况大多发生在大城市里;而对于基层来说实施落实依然是非常困难的问题。例如,基层畜牧兽医治疗设备就难以企及大城市中兽医的治疗设备,这是客观存在的问题。而且大多数基层畜牧业仍然处于原始放养的状态,难以进行系统化的管理,自然也就无法将先进的理论概念进行传导,非常不利于基层畜牧业的系统发展。
6 结论
本文所提出的FPSO算法模糊逻辑规则对标准PSO算法中的惯性权值参数进行了改进,并将该算法应用到小天体探测器着陆陆标优化选取,通过仿真结果验证:
2)培训内容:医院历史沿革及文化建设、党团工作介绍、医院感染控制及医务人员职业防护、工资福利和考核、心肺复苏、消防安全、医疗核心制度和医患沟通、住院医师规范化培训及考核和护理专项培训。培训时间共计为5个工作日。
1)利用模糊逻辑规则很好地权衡标准PSO算法的探索能力和开发能力。在迭代计算早期扩大搜索范围,在迭代后期加速收敛性能;
2)在与其它陆标选取方法比较的基础上,采用优化的陆标参与导航解算的相较全部陆标具滤波精度提高了35.6%,相较随机选取陆标时间减少了47.8%。