锅炉密闭空间无人机定位导航系统设计
2021-11-17华志刚陈建国朱继涛吴宏亮范佳卿林润达
汪 勇, 华志刚, 陈建国, 朱继涛, 吴宏亮, 范佳卿, 林润达
(1.上海发电设备成套设计研究院有限责任公司, 上海 200240;2.国家电力投资集团有限公司战略研究院, 北京 100029;3.国家电投集团江西电力有限公司, 南昌 330096)
在电厂锅炉炉膛内会发生GPS信号失效、地磁干扰等问题,同时由于该环境内部密闭无光,视觉定位技术面临极大挑战,无法实现无人机的定位导航。近年来,国内外学者针对无人机在密闭空间内的定位导航进行了大量的研究。
Gohl等[1-2]研究了地下矿山的空间检测和矿山结构三维重建方法。Burri等[3-4]设计并开发了用于锅炉炉膛检测的无人机,通过将机载前视摄像头系统与惯性测量进行耦合来估算无人机的位姿,基于模型预测控制器实现了高效的轨迹跟踪,并且无人机能在锅炉表面附近飞行。Nieuwenhuisen等[5-6]开发出利用多旋翼无人机进行工业烟囱巡检的无人机导航系统。孔天恒等[7-8]基于扩展卡尔曼滤波器(EKF)和D&C SLAM算法并配合激光雷达实现了室内定位和建图。孙朋[9]对SRT算法进行了改进,通过加入沿墙导航策略克服了激光雷达因检测不到环境特征而无法定位的缺陷,实现了无人机在未知室内环境下的自主探索。陈杰[10]采用EKF的算法框架,在激光雷达的定位算法中融合了惯导、气压计、光流等定位手段,提高了定位精度。唐邓清[11]采用光流法跟踪激光雷达数据,获得图像的深度信息,再通过PnP解算和非线性优化过程精确地估计出无人机位姿。
目前,关于密闭空间飞行定位的研究工作分为两类,一类是针对特定的工业环境,此类算法具有高度的定制性,另一类则针对室内环境,此类算法需借助外部标记或视觉传感器。而本文的研究目的是设计一种能够尽量适应锅炉密闭空间的无人机定位导航系统,在无光照条件下无法依赖视觉传感器,且需要算法对不同环境具有更普遍的适应性。
1 密闭空间无人机位姿估计
在无人机应用场景中,无人机飞行时姿态变化相较于地面车辆姿态变化更剧烈,当无人机远离地面时激光雷达不能有效检测到地面特征点,因此在无人机应用场景中LOAM的姿态估计和高度估计均会出现较大误差。由于在密闭空间内空气流动性很差,因此可以以气压计作为无人机高度的辅助测量手段,笔者基于互补滤波的姿态估计算法设计了结合陀螺仪、加速度计、气压计和激光雷达的多传感器融合的位姿估计算法。
1.1 算法框架
基于多传感器融合的位姿估计算法融合了惯导系统的无人机俯仰角和横滚角估计、气压计高度估计以及激光雷达偏航角估计,实现了无人机在密闭空间内的定位导航。图1给出了基于多传感器融合的位姿估计算法的整体框架。该算法待估计的位姿矩阵为TL,W=[τL,WrL,W]T,其中位置矩阵τL,W=[xyz]T,姿态角矩阵rL,W=[φθψ]T,x、y和z为三维坐标,φ、θ和ψ分别为无人机的俯仰角、横滚角和偏航角。将三维坐标和无人机的姿态角重新排列,定义λL,W=[φθz]T,σL,W=[xyψ]T,将惯导系统与气压计获得数据融合可得到λL,W,在此基础上基于激光雷达可得到σL,W。
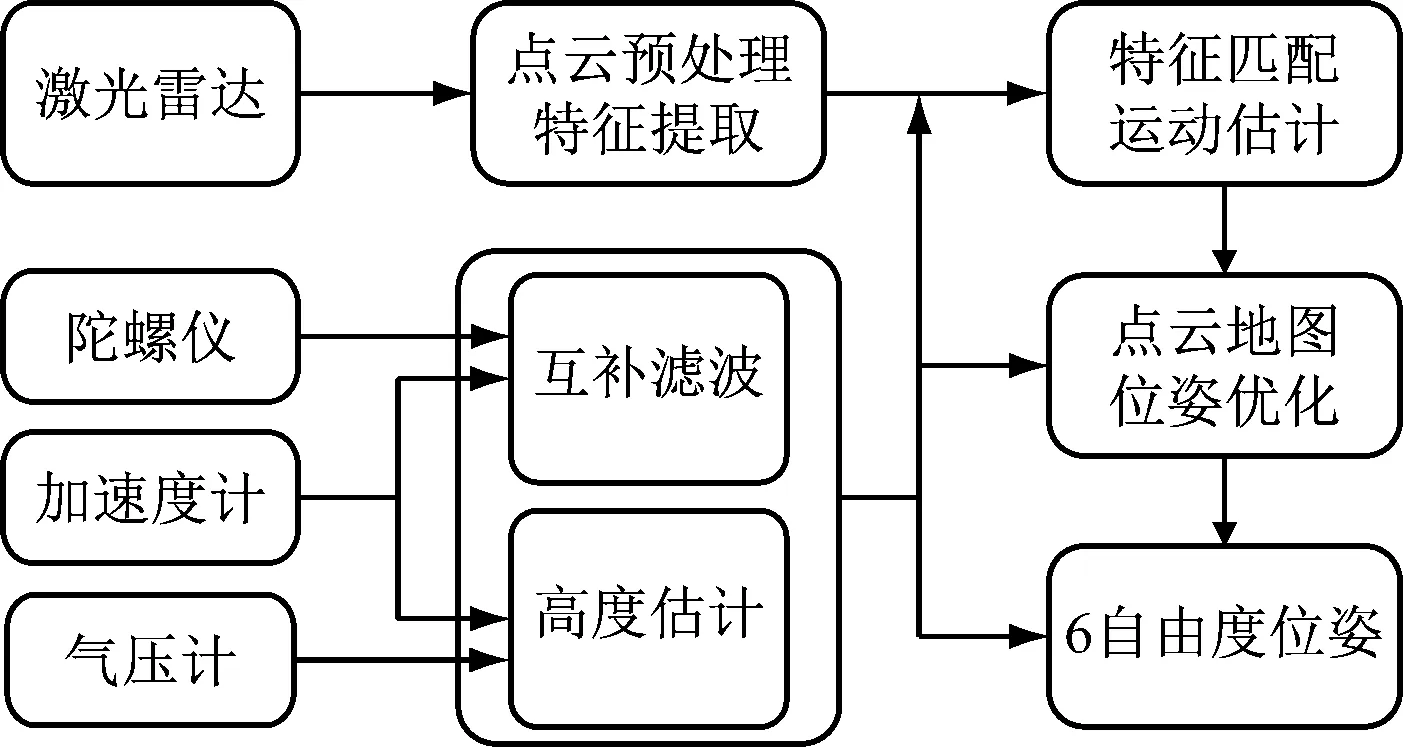
图1 基于多传感器融合的位姿估计算法Fig.1 Pose estimation algorithm based on multi-sensor fusion
通过陀螺仪、加速度计和气压计分别获得无人机的姿态角、加速度和高度,将传感器获得的数据通过互补滤波等算法进行优化,并将其与激光雷达数据融合后传给地图,构建模块和控制模块。
1.2 俯仰角、横滚角和高度估计
不同传感器具有不同的物理特性,因此在对同一信号进行测量时可能会产生不同特性的噪声。图2给出了基于互补滤波器的俯仰角和横滚角估计算法。通过陀螺仪可以得到无人机的姿态角,考虑到存在误差,通过加速度计的辅助,使激光雷达的扫描平面经过互补滤波器后,得到优化后俯仰角和横滚角的精准值。将获得数据和目标数据进行比较,从而进行飞行控制。
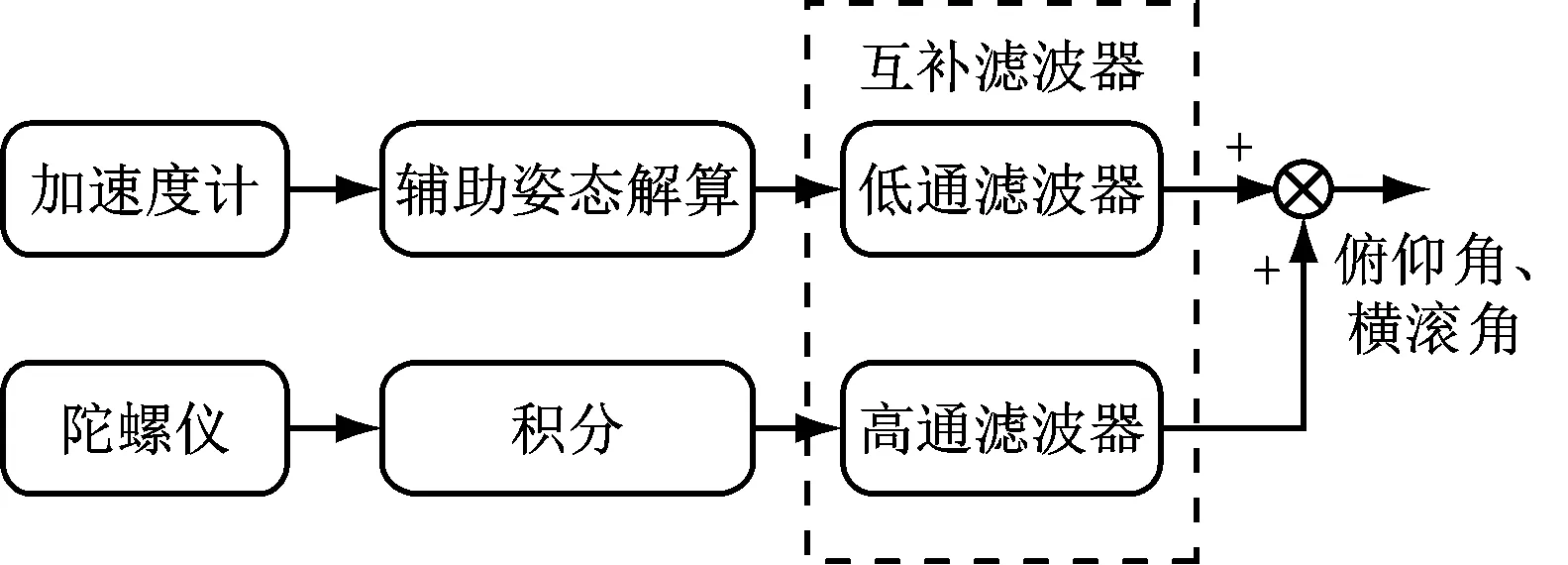
图2 基于互补滤波器的俯仰角和横滚角估计Fig.2 Pitch and roll angle estimation algorithm basedon complementary filter
单独利用陀螺仪进行姿态角的估计,随着时间的累积,由于随机漂移的影响,导致估计值发散。加速度计容易受到机体振动等干扰,短时间内稳定性差,难以收敛到最优解。对于陀螺仪随机漂移产生的低频噪声干扰,其输出显示为高通特性,应采用高通滤波器滤除;加速度计的动态响应差,其输出显示为低通特性,采用低通滤波器滤除。由于陀螺仪和加速度计的输出具有频率互补特性,因此互补滤波算法可以降低不同传感器的噪声特性,利用低成本的嵌入式系统即可满足姿态测量要求。
采用加速度计和气压计融合算法进行无人机的高度估计。通常气压计测量得到的高度信息容易受到外界气流的干扰,在室外情况下风力因素会对气压计的高度测量产生很大影响。因此,在无人机飞控中气压计传感器上通常会覆盖海绵类材料以减小干扰气流的影响。在密闭空间中基本为无风环境,空间内气流相对稳定,气压计测量高度的效果更好。因此,对通过加速度计得到的数据进行积分,得到高度数据,并对其进行低通滤波后再与气压计的高度数据进行融合。气压计测量得到的高度数据是根据气压值计算得到的绝对高度,因此相对无人机导航坐标系的高度需要通过记录初始高度进行换算。
1.3 水平方向位置与偏航角估计
由惯性测量单元和气压计得到t时刻下的λL,W,t=[φtθtzt]T的可靠估计。在此基础上,估计得到t时刻下的σL,W,t=[xtytψt]T。
1.3.1 特征提取
图3给出了在3面竖直围墙的环境下激光雷达扫描得到的点云信息。在扫描平面中,具有平面物理特征的墙体表面在点云中呈现为直线,而具有直线物理特征的墙角呈现为拐点,在实际场景中这2种特征可以根据点与周围点的平滑度来提取。
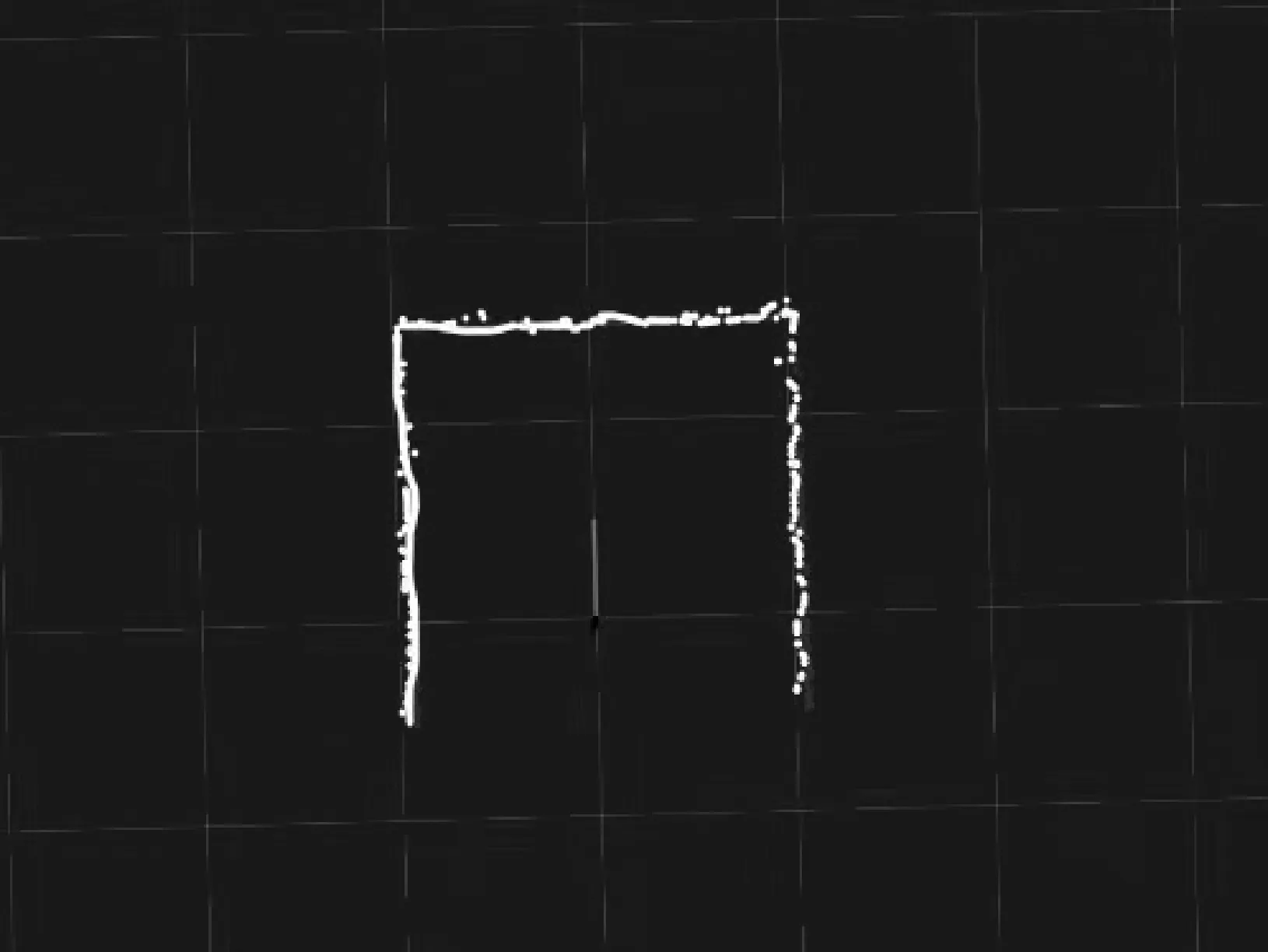
图3 单束激光雷达扫描测量点云Fig.3 Single laser scanning measurement data
设激光雷达扫描平面中的点为Xk,i,Xk,i位于序列中间,其中k为扫描平面编号。S为扫描平面的连续序列,其序列数为10,Xk,i的平滑度C(k,i)可表示为:
(1)
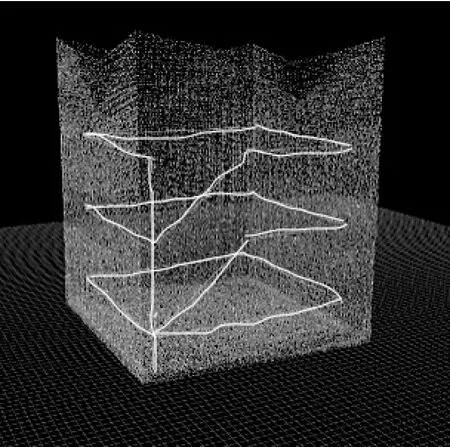
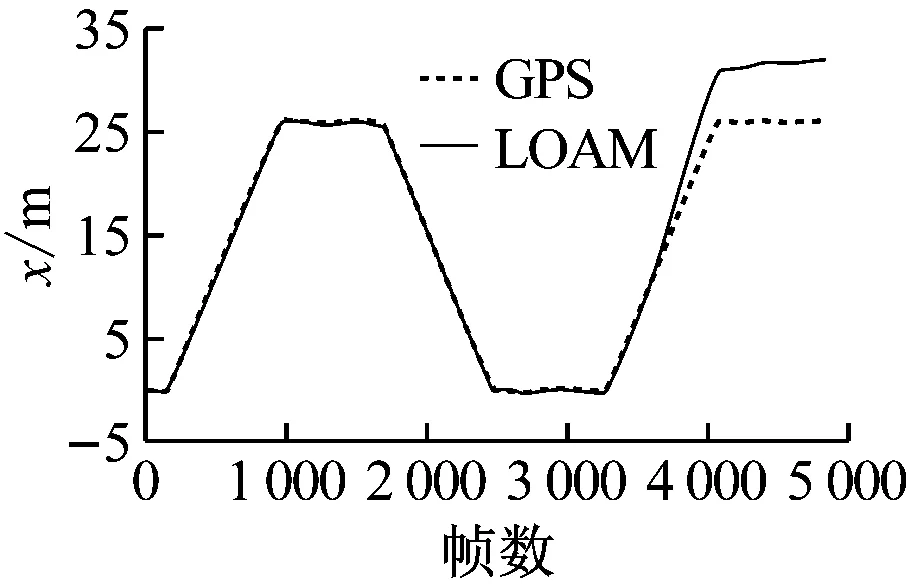
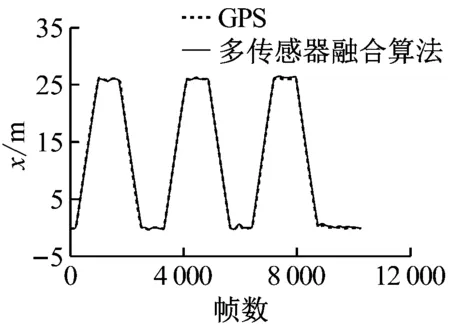
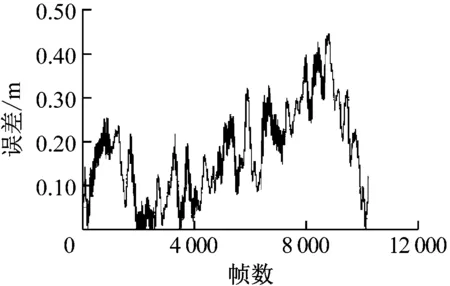
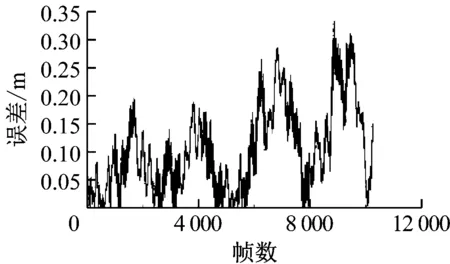
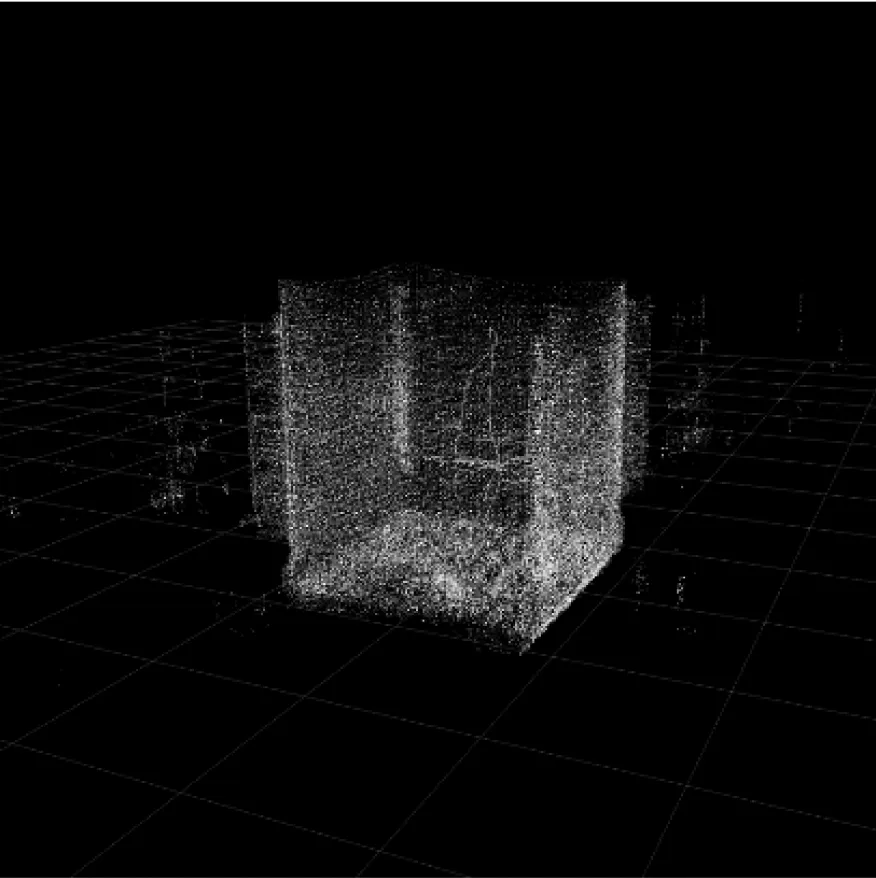
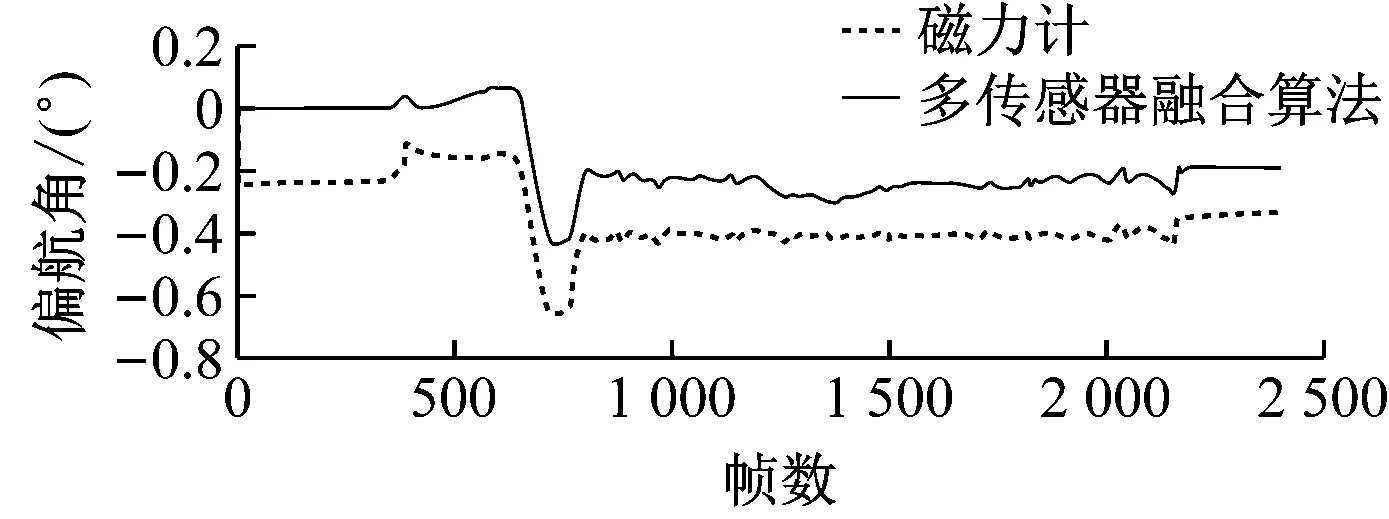
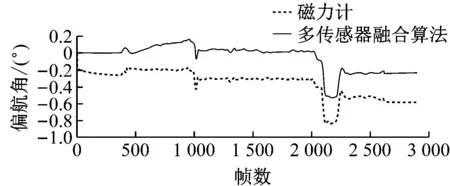
对所有点的平滑度进行排序,C(k,i)小说明不平滑,C(k,i)>CCorner时为线特征点,C(k,i) 图4给出了在四面围墙环境中激光雷达点云特征提取结果。从图4可以看出,4个墙角均被识别为线特征点,相邻激光雷达扫描平面中的线特征点组成4条对应4个墙角的直线,而面特征点则均匀分布在墙面上。 图4 激光雷达点云特征提取效果Fig.4 Feature extraction results of laser point cloud 1.3.2 特征匹配与运动估计 以t-1~t时间范围为例,记t-1和t时刻激光雷达得到的点云点集分别为Lt-1和Lt,提取Lt中的线、面特征点的点集,分别为wt和ft。记t-2~t-1时间内x和y方向的增量分别为xt-2,t-1和yt-2,t-1,t-1时刻的偏航角为ψt-1,即σt-2,t-1=[xt-2,t-1yt-2,t-1ψt-1]T;记t-1时刻下的位姿矩阵为TL,W,t-1=[τL,W,t-1rL,W,t-1]T;t时刻下λL,W,t=[φtθtzt]T。 将wt和ft变换到t-1时刻的激光雷达坐标系下,假设激光雷达相邻两帧间匀速,将上次估计的增量作为本次估计的估计值进行变换。在λL,W,t已知的情况下,wt和ft的变换更加精确。根据当前和上个时刻的高度,求世界坐标系下高度增量矩阵τz,W,δ=[0 0zW,t-1,t]T,记t-1~t时间内x和y方向的增量分别为xt-1,t和yt-1,t,即τδ=[xt-1,tyt-1,t0]T,则t-1~t时间段内雷达平移增量矩阵τδ,t-1,t可表示为: (2) 式中:RL,W,t-1为两帧之间的旋转矩阵;τδ,W为两帧之间的平移矩阵。 (3) 在Lt-1中寻找特征点的匹配点,可构建线特征点的匹配函数fW,该函数可表示为: fW(Xt,k,σL,W)=dW,Xt,k∈wt (4) 式中:dW为线特征点在拟合方程中的差值;wt为t时刻的线特征点集。 面特征点的匹配函数ff可表示为: ff(Xt,k,σL,W)=df,Xt,k∈ft (5) 式中:df为面特征点在拟合方程中的差值;ft为t时刻的面特征点集。 1.3.3 位姿优化 将当前点云变换到世界坐标系下,在相同的位置寻找匹配点,此时λL,W=[φtθtzt]T中3个变量已知,对σL,W=[xyψ]T进行优化,最终构建方程: 国外学者认为,智慧校园利用信息技术来改变学生的学习和教师的工作,“为人们创造服务”[5]。总之,智慧校园综合运用智能物联网、高速互联网、高速无线网、虚拟化技术、云计算、统一存储和分布式存储以及大数据平台等信息技术,全方位感知校园物理环境,智能识别师生个体,实现以人为本的个性化服务。 f(σL,W)=d (6) 式中:d为残差。 对式(6)的未知量取偏导得到极值点,可解出σL,W的最优解,最终实现对水平位置x、y和偏航角ψ的可靠估计。 结合实际锅炉图纸,利用Solidworks软件进行1∶1建模,将其导入Ubuntu的工作空间,添加无人机和相关传感器模型后,在机器人操作系统(ROS)环境下基于Gazebo软件进行仿真。无人机在仿真飞行和实际飞行过程中,其运行指标以飞行目标位置与实际位置的关系为准,二者之间的差值越小,其飞行精度越高,定位越准确。 将激光雷达的数据与其他传感器的数据融合,通过算法计算下一时刻的目标位置,将当前自身定位的位置和下一时刻的目标位置进行比较,并通过避障等相关程序计算无人机的速度和加速度等参数。 2.1.1 建图结果对比 图5给出了低速情况下多传感器融合算法的炉膛建图结果。该算法能较好地进行整个飞行过程的位姿估计和地图构建,算法估计的无人机飞行轨迹基本与设定的飞行轨迹吻合,点云地图也较好地重现了锅炉炉膛模型的结构,未出现重影、弯曲等现象,且在点云地图中锅炉模型的4个直角也未出现明显的偏差。将点云数据和实际锅炉图纸进行比较,可以发现点云数据可靠,高度精准,且能反映实际情况。 2.1.2 位置估计结果对比 图6给出了锅炉炉膛环境下多传感器融合算法估计的无人机飞行轨迹与GPS参考轨迹的对比。在实际环境中锅炉内不存在GPS,通过在仿真环境中添加GPS环境,将GPS环境下的数据作为参考值,验证在有、无GPS环境下无人机飞行定位的精确度。从图6可以看出,基于多传感器融合算法得到的无人机飞行轨迹与GPS参考轨迹基本重合,且在不同高度上均得到了较理想的位置估计结果。 (a) 侧视图 (a) x轴、激光雷达 (c) x轴、多传感器融合算法 2.1.3 水平位置对比及误差分析 图7为锅炉炉膛内x轴和y轴方向的位置误差。基于多传感器融合算法的位置误差整体维持在较低水平,与在建筑物房间内的位置误差基本持平。由图6和图7可知,在仿真环境下以理想GPS环境为参考,无人机位置在x轴和y轴的位置误差均在0.5 m以内,可以精准控制飞行。 图8给出了基于多传感器融合算法的锅炉炉膛建图结果。在不同激光雷达分辨率下点云地图均能较好地恢复锅炉炉膛的内部结构。如图8(b)所示,4个直角部分在锅炉炉膛外部出现了点云,这是由于锅炉4个直角部位的燃烧器上存在孔洞,激光雷达透过孔洞测量到燃烧器的内部数据。由于实验场地无人机所处平台为金属网状结构,激光雷达可以透过金属网测量得到部分平台下方的信息,因此从图8中还可以看出锅炉炉膛底部的梯形结构。激光雷达配置为单线2 048个测量点,由于其分辨率更高,底部的梯形结构也更加明显。 (a) x轴 (b) y轴图7 锅炉炉膛内x轴和y轴方向的位置误差Fig.7 Position errors at x and y directions in the boiler furnace (a) 侧视图 图9给出了锅炉炉膛内基于多传感器融合算法的偏航角变化。当通过磁力计和多传感器融合算法得到的偏航角均足够准确时,由于无人机的初始朝向与地磁北极未经过对准,因此理论上这2条偏航角曲线间的差值应保持恒定。从图9可以看出,采用多传感器融合算法得到的曲线基本符合这一结果。 在实际环境中,将通过磁力计得到的偏航角与计算获得的偏航角进行比较,可以看出两者存在一定的差距,但偏航角的整体变化趋势一致,且误差在可接受范围之内,控制精度较高。 (a) 1 024点数下的偏航角 (b) 2 048点数下的偏航角图9 基于多传感器融合算法得到的偏航角变化Fig.9 Yaw angle variation based on multi-sensor fusion algorithm (1) 通过对无人机的飞行进行控制,由锅炉炉膛内的实验验证了多传感器融合算法的准确性。 (2) 激光雷达建立的点云图清晰无重叠,无偏斜。 (3) 位置和姿态角的实际数据与理想数据之间的偏差在理想范围内波动,无人机的飞行路径没有发生突变等情况,飞行效果与目标效果相近。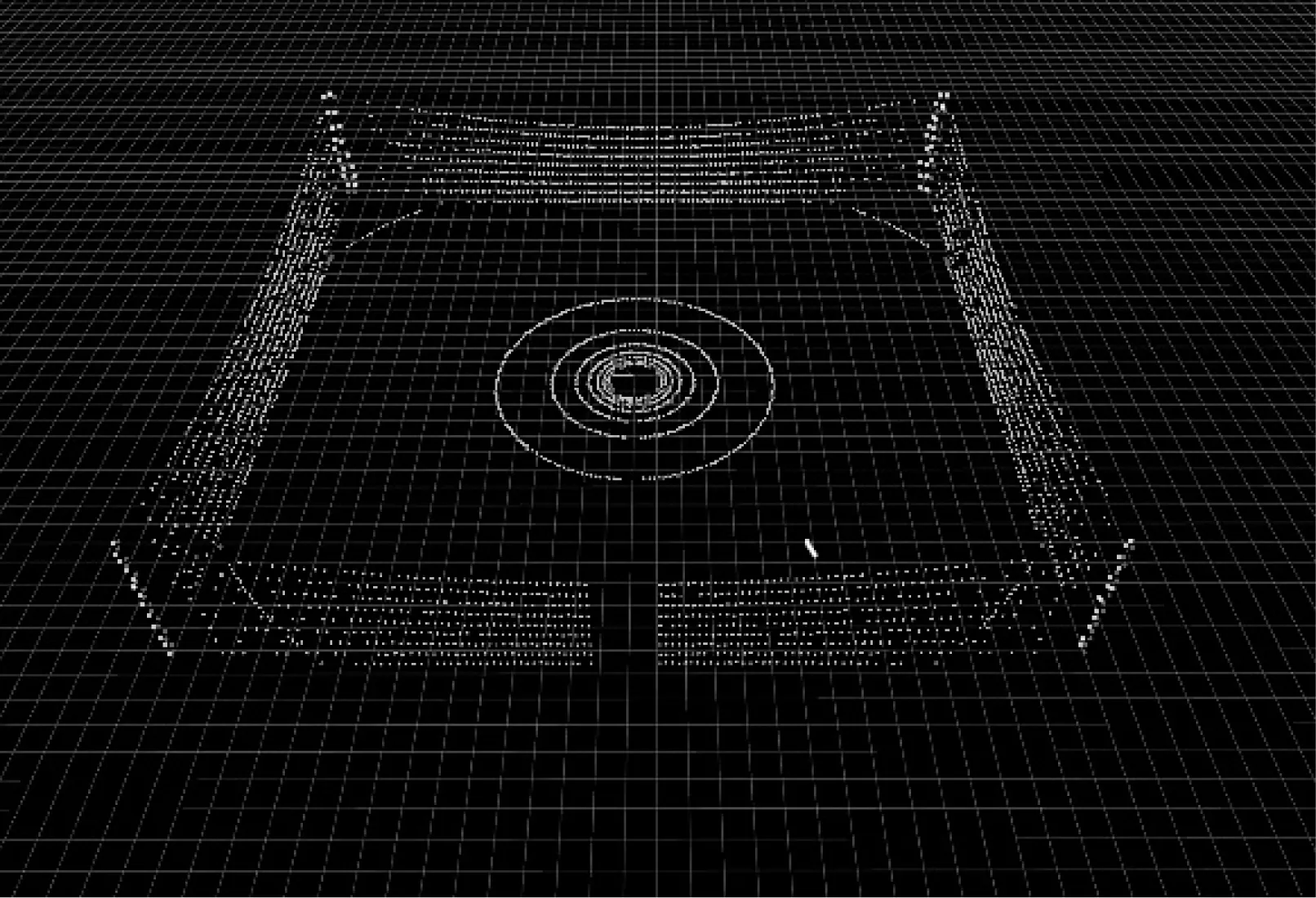

2 仿真实验
2.1 低速飞行情况下的仿真结果
2.2 实验结果分析
3 结 论
