一种改进的暗通道先验去雾算法研究
2021-11-17张爱萍田东平
韩 亮,张爱萍,田东平
(西安建筑科技大学理学院,陕西西安710055)
1 引言
随着城市化进程的推进,各行各业对智能设备的依赖度越来越高。大多数智能设备如遥感卫星成像、智能驾驶、道路监控等领域依靠输入较好的可视性图像来实现智能化。然而在获取图像的过程中,智能设备容易受到户外天气因素干扰,如雾、烟、雨等天气会导致设备所获取图像的视觉效果衰减、对比度及饱和度降低。因此,研究降质图像的去雾算法对提高智能设备的成像效果,具有重要的研究意义及应用价值。
Fattal[1]通过统计输入图像特性,独立计算分析出场景内反射率来实现去雾,但在处理时需要充足色彩信息。Tarel等[2]构建出某区域内变化缓慢的大气耗散函数实现去雾,但在去雾过程中使用色彩度调和,造成图像去雾后存在色彩失真现象。Ancuti等[3]通过两幅图像融合多尺度逐个像素进行处理,但由于只能通过2幅衍生图像进行融合,算法的时间复杂度较大。He等人[4]提出了基于暗原色先验的单幅图像去雾算法,他们通过观察大量晴天拍摄的图像发现:这些图像总是存在一些“暗点”,而这些“暗点”特性是至少存在一个颜色通道的值很低且逼近于零。利用这些“暗点”可以估算出拍摄场景中雾的浓度,再结合大气散射模型粗略估算出降质图像的透射率。但是在实际使用中当场景物体和大气光性质十分接近时,暗通道先验是无效的。Meng等人[5]提出基于边界约束的去雾算法,是利用正则化约束方法对透射率加权,求取最优解作为透射率的估计。该方法虽然对天空区域色彩失真问题有了一定程度的改善,但是对天空区域和非天空区域的边界处容易出现边界模糊,细节信息不清晰的现象。
针对目前暗通道先验算法在图像的明亮区域去雾时存在色偏严重、色彩失真等问题,本文提出一种改进的暗通道先验去雾方法。该方法通过三通道明亮区域分割法获得准确大气光强度值,根据辐射立方体准则,使用边界约束条件得到透射率图像,并利用高斯型同态滤波优化透射图像,再结合色阶补偿原理[6]对透射率图像与源图像进行小波融合,通过将融合后的图像与去雾后的图像进行不断地融合补偿,最终获得最佳色阶透射率图像,以达到平滑、去雾的最佳视觉效果。仿真结果表明,本文算法可以改善明亮区域色彩失真现象,保持图像整体轮廓及较好的可视度。
2 暗通道先验理论
通常户外天气下,室外获取图像时会受到空气中大气微粒(如尘埃,小水滴等)影响,产生不同程度的散射。在雾天中,大气微粒散射影响尤为明显,Narasimhan[7]提出了大气散射模型
I(x)=J(x)t(x)+A[1-t(x)]
(1)
其中,x表示图像中像素点的二维空间位置;I(x)为观测或拍摄到的有雾图像;J(x)为无雾的清晰图像;A为全局大气光强度,一般情况下取常数,与局部位置x无关;t(x)为光线的透射率,反映场景深度信息,会随着场景内景物到相机镜头的距离增大而减小。
暗原色理论认为在多数不包括明亮区域的户外无雾图像中,至少存在趋近于0的像素点[9],即
(2)
其中,Jc(y)是输入图像的某一通道;φ(x)是以像素点x为中心的局部区域;Jdark(x)是雾化图像在φ(x)区域中的暗原色像素,若是无雾图像,Jdark(x)会趋近于0。
结合(2)式和(1)式,得到图像的近似透射率t(x)
(3)
根据式(3),结合图像的成像模型(1)式,就可以得到去雾后的清晰图像J(x):
(4)
其中,t0为阈值,防止t(x)透射率过小导致图像整体向白场过渡,一般取t0=0.1。
3 改进的暗通道先验去雾算法
根据有雾图像得到大气光强度A和透射率t(x),就可以复原出清晰的无雾图像。本文的算法是基于暗通道先验理论,首先,利用三通道明亮区域分割法获得全局大气光强度值;其次,利用边界约束条件得到初步的透射率图像,并运用高斯型同态滤波对透射率图像进行平滑处理;最后,用色阶补偿原理结合小波变换对透射率图像与源图像进行融合,通过多次融合补偿获得最佳色阶图像,进行复原得到无雾图像。
3.1 引入三通道明亮区域分割方法求解全局大气光A
He的暗原色算法理论中,通常选取暗原色通道中亮度最高的0.1%像素,并将这些像素对应到有雾图像中取最大亮度作为大气光A,该方法容易受到诸如明亮区域物体(如天空、白色物体等)的干扰,使得A取值偏大,从而影响着最终的去雾效果。
根据图像明亮区域中梯度变化较低,像素趋近最大亮度等这些特性,本文引入三通道明亮区域分割方法,有效地分割明亮区域,求解大气光强度。首先,得到高斯滤波平滑后的图像如下
F(x)=h(x)*β(x)σ,ξ
(5)
其中,β(x)σ,ξ为高斯滤波的核函数,σ,ξ分别为核函数的尺寸和标准差,F(x)为高斯滤波平滑后的图像。其次,运用三通道明亮区域分割方法,即分别设置RGB三通道的阈值,通过对原图像利用迭代法求得最小像素灰度值φ(F(X)),初步获得明亮区域分割图像;为了减少区域内过度曝光的像素点,通过多次迭代与修正方法求得更为精确大气光强A:
(6)

3.2 边界约束高斯型同态滤波
经典的暗通道先验算法采用最小值滤波的方法获取暗通道图像,He等为了抑制“阶梯”效应,采用软抠图或者引导滤波方法来优化透射率及暗通道图像,但由于对图像平滑程度有限,图像边缘区域存在色块效应及光晕现象。为了避免这些问题,本文构建了边界约束与高斯型同态滤波的平滑方法。
基于辐射立方体准则的边界限制是通过约束条件把暗通道图像限定到一定的范围之内[8]。该方法可以简化暗通道图像求解的复杂度,一定程度上还可以避免暗通道图像的“阶梯”效应。根据式(1),可以得到
(7)
考虑到图像的场景散射的限制,如图1所示,设定场景的图像边界为
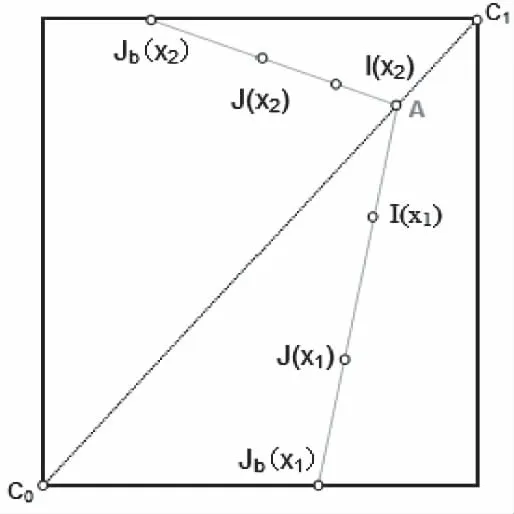
图1 辐射立方体准则
C0≤J(x)≤C1
(8)
其中,C0、C1分别为图像的上下边界。从图1可知,由式(7)和(8),可以得到透射率图像的限制边界条件:
C0≤tb(x)≤t(x)≤C1
(9)
其中tb(x)为透射率图像的下限边界,由(7)式可得:
(10)
经过边界约束处理,得到初步去除“阶梯”效应的等效暗通道图像,且该图像的边缘也出现了一定的模糊,但明亮区域部分的“阶梯”效应仍然明显,就会造成去雾复原时出现光晕现象。本文通过高斯型同态滤波的方法,对透射率图像的边缘进行增强,对图像其余的部分进行平滑处理,可以有效地避免光晕现象。通过高斯型同态滤波处理,使得图像在保持边缘的基础上尽可能的与原图相似。高斯型同态滤波的数学表达式为[9]
(11)
其中,H(u,v)为高斯型同态滤波的传递函数;aH,aL分别为高频与低频增益系数;c为锐化常数,用来控制滤波器函数斜面的锐化;D(u,v)表示频率(u,v)到滤波中心(u0,v0)的距离,D0为截止频率。
依据He的算法和本文高斯型同态滤波算法,分别采用(3)式和(11)式得到处理后的透射率图像。如图2所示,分别是用两种方法进行远景图及近景图清晰化处理对比结果。其中图2(a)是原始有雾远景、近景图像;图2(b)、3是He方法得到的暗通道透射率图像;图2(c)、是本文算法得到的透射率优化图像;图2(d)、是何的方法去雾之后的结果;图2(e)是本文方法去雾之后的结果。可以看出,两种方法在近景有雾图像清晰化处理时都可以达到很好的效果;但在远景有雾图像清晰化处理时,He方法在景深突变边缘与天空区域存在边缘模糊,如图2(d)所示;而本文方法经过滤波处理后透射率图像保留了图像的边缘,平滑了图像非边缘部分,但图像远景处仍存在过度曝光及白边现象,如图2(e)所示。

图2 远景与近景透射率图像的优化对比
3.3 基于小波融合的色阶差补偿
由于同态滤波处理图像时使用的是傅立叶变换,它虽然能较好地刻画信号的频谱特性,但傅立叶变换所采用的三角函数系在时域上没有任何局部性[10],不能提供有关频率成分的时间局部化信息,因此在增强图像对比度时导致局部亮度过大。相对于傅里叶变换,小波变换是一种信号的时间-频率分析方法,将小波变换作为频域多尺度图像融合的工具,具有良好的局部特性,且融合结果符合人类视觉认知[11]。本文在边界约束高斯型同态滤波的基础上,结合小波融合对复原后远景图像进行色阶补偿修正,目的是解决复原后远景图像存在过渡曝光及白边问题。
假定原始图像的色阶为α,通过边界约束高斯型同态滤波后图像的色阶为ρ(α),两幅图像的色阶差为δn=|α-ρ(α)|,其中δn必存在最佳的色阶差。因此可以通过多次对去雾后的图像像素进行色阶补偿来实现图像优化,从而使得去雾后的图像像素色阶变得更加适应观测。像素色阶补偿流程图如图3所示。
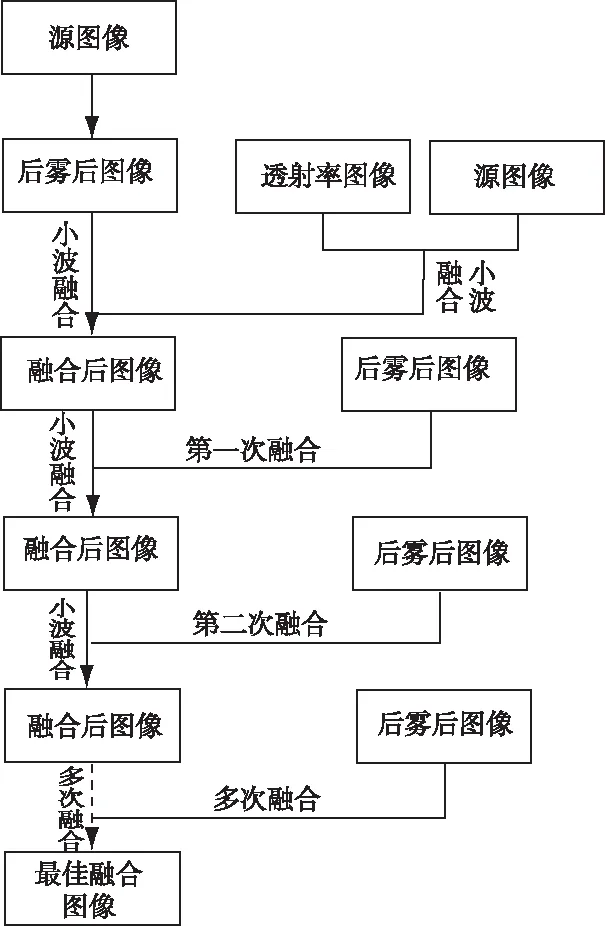
图3 像素色阶补偿流程图
图像的低频部分是图像的轮廓和平均特性,高频部分是图像的细节特性。在图4所示的小波融合过程中,采用的融合规则及融合算法是:待融合图像低频部分采用逻辑滤波器对近似分量进行处理,如式(12)所示:
fC(x,y)=θC1(x,y)+(1-θ)C2(x,y)
(12)
其中,fC(x,y)为融合后图像近似分量;θ为权重参数,一般取:θ=0.5;C1(x,y)与C2(x,y)分别为重构时图像小波分解的近似分量。按加权平均进行融合后更大程度地消除噪声并抑制伪影。待融合图像高频部分按绝对值最大对细节分量进行处理,如式(13)所示:
fA(x,y)=max{|A1(x,y)|,|A2(x,y)|}
(13)
其中,fA(x,y)为融合后图像细节分量;A1(x,y)与A2(x,y)分别为重构时小波分解的细节分量,取绝对值较大的细节分量时图像边界轮廓更为清晰。
一次融合并不一定能立即得到最优的像素色阶,所以可以进行多次融合来进行不断优化。第一次融合时,利用滤波后的透射率图像和源图像得到融合图像A1,融合后,图像A1的像素色阶为ρ1(α)=|α+δ1|;将融合图像A1与去雾后图像再次融合得到第二次融合图像A2,图像A2的像素色阶为ρ2(α)=|α+δ2|;再利用第二次融合图像A2与去雾后图像进行三次融合得到三次融合图像A3,依次类推,经过多次融合,直到获取最优像素色阶。由于每次融合后色阶补偿差为δn(n=1,2,3…),则补偿后图像的像素色阶为
ρn(α)=|α+δn|(n=1,2,3…)
(14)
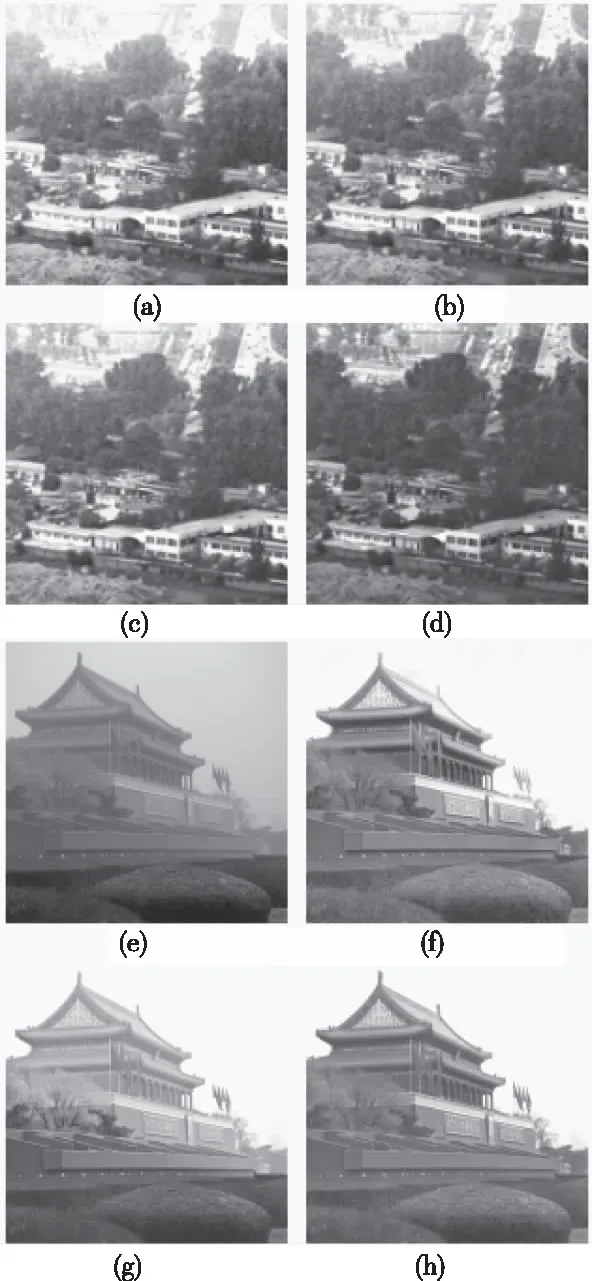
图4 基于色阶差补偿法融合图
4 实验结果分析
本文仿真是在处理器为 AMD A8、内存为8GB的笔记本电脑上用MATLAB R2014a运行的。为了验证算法的有效性,文中通过与ANCUTI算法[3],He算法[4]和Meng算法[5]作对比。仿真参数设置为:高斯同态滤波常数c=0.8,aH=1.2,aL=0.5;小波分解常数n=2;其余参数与文献[4]相同。
如图5,给出了近景溪水与远景城镇去雾效果对比图。可以看出,选取的每种方法都有一定的去雾效果。经过He方法处理,图像的溪水周围存在色彩失真,这是由于溪水区域属于高亮度反光区域,完全不满足暗通道先验原则,去雾后复原图像会出现色彩失真及伪影,如图5(c)所示。ANCUTI算法处理后,图5(b)图像中残留一定程度雾气,主要原因是ANCUTI算法去雾依赖于权重图,当图像亮度过高时导致整幅图像权重图难以有效构建,因此对远景图像去雾效果不佳;如图5(c)所示,He算法处理后,图像的天空区域有颜色失真现象;经过Meng算法处理后,图像近景去雾效果较好,图像整体轮廓细节较为完整,但该算法只通过条件约束简化透射图像,未优化图像色彩保真度,导致远景区域存在伪影及光晕现象,如图5(d)所示;本文算法复原后图像整体明亮度相对较好,通过使用高斯型同态滤波,复原图像远景区域细节明显,在去雾同时可视度提高,如图5(e)所示
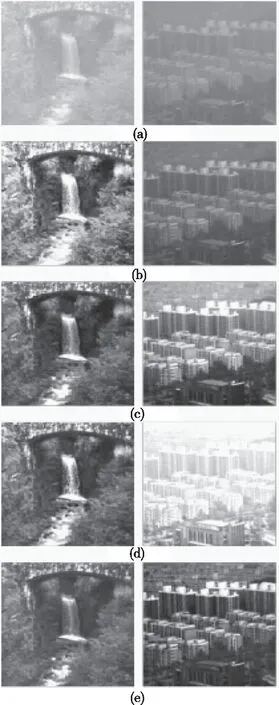
图5 溪水与城镇去雾效果图
采用文献[12]中提出的客观评价方法对图5复原结果进行评估。从表1、表2可以看出,本文算法去雾后信息熵、新增可见边比、峰值信噪比都比其它算法高,表明本文算法去雾之后图像更加清晰,图像的可视边缘与轮廓数量增多,图像信息量得到提升。
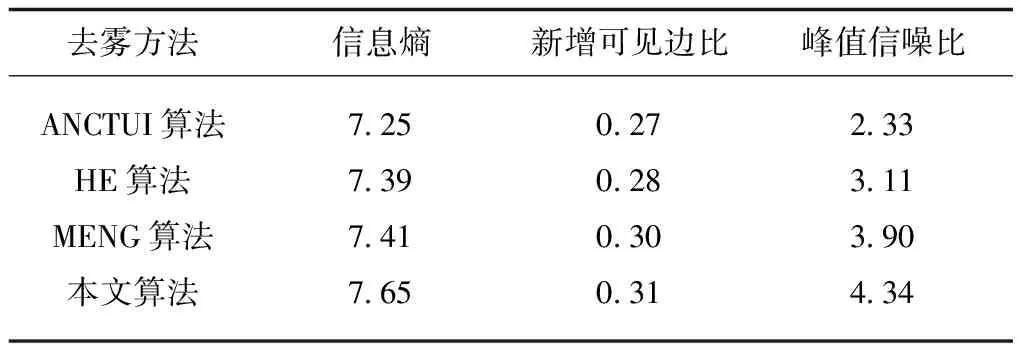
表1 近景溪水图去雾算法评估结果

表2 远景城镇图去雾算法评估结果
5 结论
针对暗通道先验去雾方法在处理明亮区域时存在色彩失真、色偏严重等问题,本文采用三通道明亮区域分割获取准确的大气光强度,然后基于辐射立方体法则的条件约束整幅图像结构轮廓;利用高斯型同态滤波的特性结合小波融合,对透射率图像平滑处理,使用色阶补偿修正去雾后图像的饱和度。在求取大气光值和融合透射图像过程中,本文算法具有较高的鲁棒性;去雾后图像边缘细节突出,整体轮廓结构清晰。但该算法处理复杂的雾天图像时,算法运行时间较长不具有实时性,需优化参数模型并提升运行速度。