陆战平台全电化关键技术发展综述
2021-11-15李嘉麒魏曙光廖自力臧克茂
李嘉麒, 魏曙光, 廖自力, 臧克茂
(陆军装甲兵学院 兵器与控制系, 北京 100072)
0 引言
为满足“机动作战,立体攻防”的战略要求,陆战平台应具备体系作战能力、全谱作战能力、精确打击能力、快速机动能力、高效防护能力以及自主作战能力,而陆战平台的全电化技术是实现陆战平台体系作战能力跃升的重要支撑。随着电机驱动及其控制、综合电力系统、电磁、人工智能等各项关键技术的不断进步,陆战平台全电化也迎来了新的机遇与挑战[1-2]。
传统的陆战平台主要是指地面战斗平台,包括坦克、履带或轮式装甲车、自行火炮等。近年来,随着导航定位技术、人工智能科技的快速发展,新型陆战无人平台正快速走入人们的视野,其高度的自动化与智能化均对陆战平台全电化技术提出了更高的要求和标准[3-5]。
陆战平台全电化是指以电能作为基本能源,通过对电能的传输、变换、控制、分配等技术,将电能转变成另一种形式的能量,或是对电能进行高效运用,实现陆战平台各系统的最优化运行,以及陆战平台整体性能的全面提升,尤其是在动力驱动、武器系统、防护系统上的战术技术性能提升。全电化陆战平台相对于传统的陆战平台,具备更大的精确火力打击范围、更全面的综合防护能力、更快速的机动突击能力以及更高效的战场感知能力,在操控性、隐蔽性和人机环等方面也有很大的改善,且便于机动部署和后勤保障[6]。因此,全电化陆战平台凭借其优于传统陆战平台的综合性能和作战能力,已经成为世界各军事强国争相投入和研究的重点,也必将成为未来陆军装备的发展方向和未来陆战平台的研究热点[7]。
陆战平台全电化技术的涵盖范围较为广泛,本文重点讨论其驱动电机及控制技术、车载综合电力系统、电磁弹射技术和电磁防护技术的全电化问题。
1 全电化陆战平台驱动电机技术
受电池技术发展水平和能源补给条件的限制,全电化陆战平台目前仍采用发动机- 发电机组作为主要能源,搭配电池组作为辅助能源[8]。以我国某型自主研发的全电化装甲车动力驱动系统结构为例(见图1),该车由发电机、整流器、逆变器、电动机等组合而成的电传动系统取代了传统陆战平台中的机械传动装置[9]。此外,受作战时域和地域的影响,全电化陆战平台驱动电机需具备耐高温、强鲁棒性、结构简单等特点。同时,受限于全电化陆战平台内部空间的局限性,要求发动机和驱动电机需具备小体积、高功率的特点。然而,目前电传动系统的体积和质量仍然很大,阻碍了电传动系统的进一步发展,为解决这一问题,需要进行以下3方面的研究。
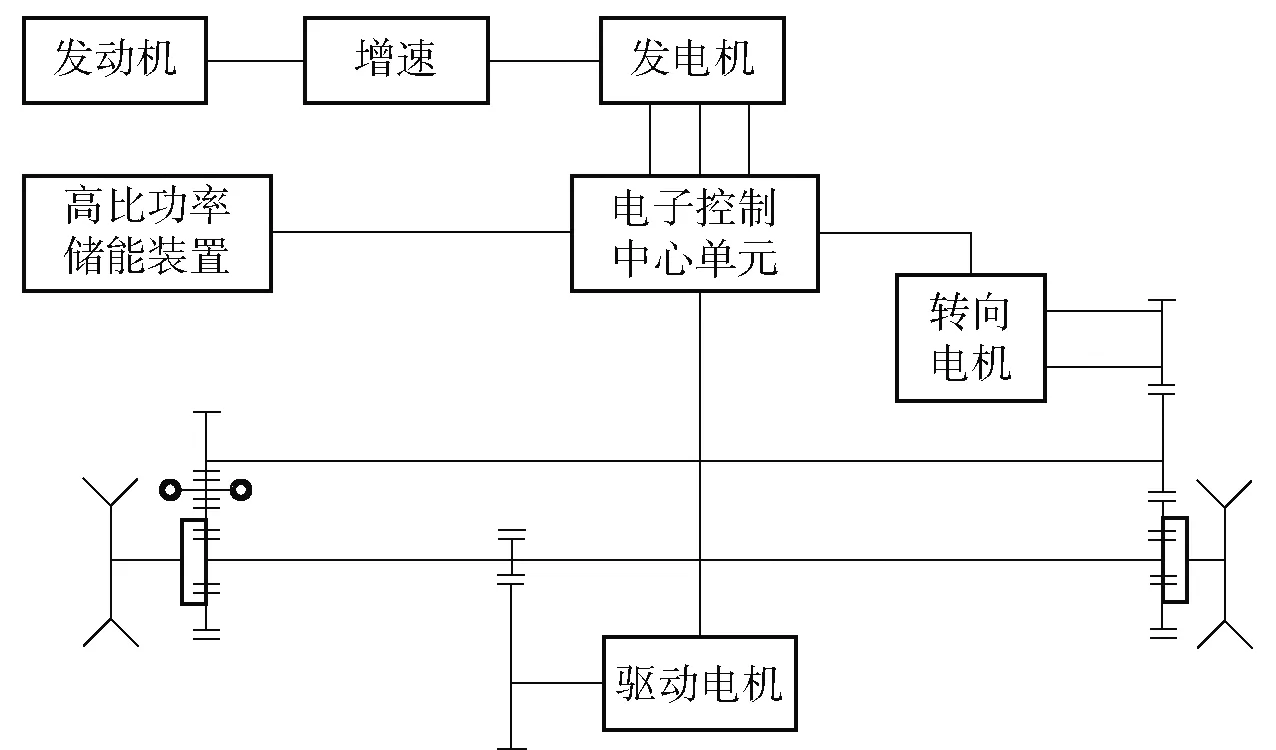
图1 某型全电化装甲车动力驱动系统结构Fig.1 Structure of drive system of an all-electric armored vehicle
1.1 高功率密度电机
在保证功率需求的前提下,为尽可能地减小电机尺寸、体积和质量,全电化陆战平台用电机一般采用高功率密度永磁同步电机。相比于其他类型的电机,永磁同步电机具有更高的功率密度、转矩密度、功率因数、效率,以及更小的体积、质量,然而由于在转子中使用了稀有金属永磁体,其成本相对其他类型的电机更高。
目前常用的永磁体包括钐钴、钕铁硼、铝镍钴、铁氧体等。其中,钕铁硼的最大磁能积可达54.2 MGOe,相同功率等级下,钕铁硼永磁电机的体积可为电励磁电机的40%左右,效率和功率因数却更高。但是,钕铁硼的居里温度较低、温度系数较高、较易锈蚀,不适于陆战平台恶劣复杂的行驶和作战环境,且长时间远距离机动过程中,易出现电机高温导致的永磁体失磁。钐钴的最大磁能积可达32.5 MGOe,较之钕铁硼稍低,但其物理性能更为稳定,具有较高的可靠性,缺点是价格较高,其单价可为钕铁硼的2倍左右[10]。在军事应用中,常选用钐钴等稀土钴永磁材料制造电机。图2所示为某型高功率密度永磁同步电机拓扑结构。表1所示为常见高性能永磁体常温下属性。

图2 某型高功率密度永磁同步电机拓扑结构Fig.2 Topological structure of a PMSM with high power density
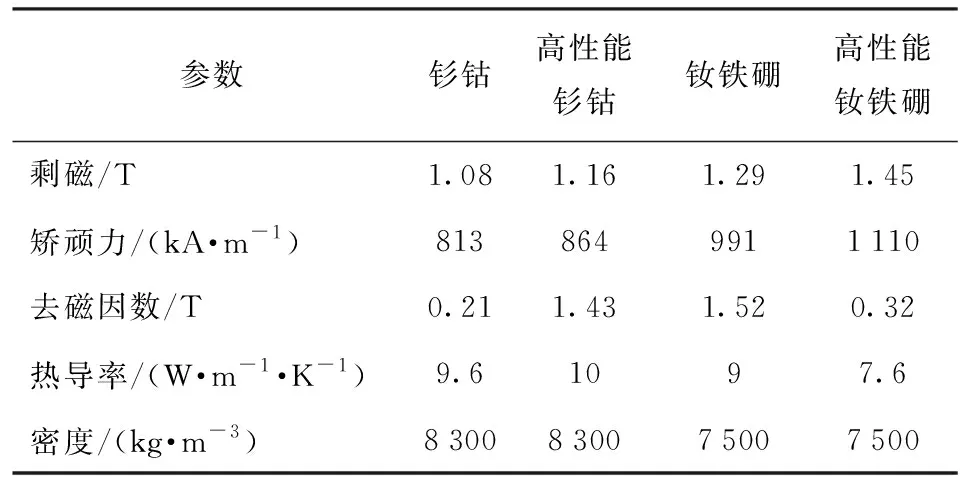
表1 部分永磁体属性(温度20 ℃)Tab.1 Properties of some permanent magnets (20 ℃)
近年来,为应对稀有金属的不可再生且产量有限,国外开始大量研究区别于永磁电机和感应电机的同步磁阻电机,图3所示为某同步磁阻电机拓扑结构。同步磁阻电机的输出转矩完全由磁阻转矩构成,其转矩大小取决于电机凸极比,即d、q轴电感比值,同步磁阻电机凸极比一般为8~12[11]. 因此,同步磁阻电机的转子结构往往较为复杂,每极转子铁芯中均有数层磁障(一般为3~4层),以减小q轴电感、增大凸极比。美国、英国和意大利学者通过将转子外置,形成外转子同步磁阻电机,其凸极比甚至可达20以上[12]。此外,Bianchi等[13]通过在转子磁障中添加铁氧体来改善电机磁路饱和,增大电机功率密度和转矩密度,并提高电机功率因数。
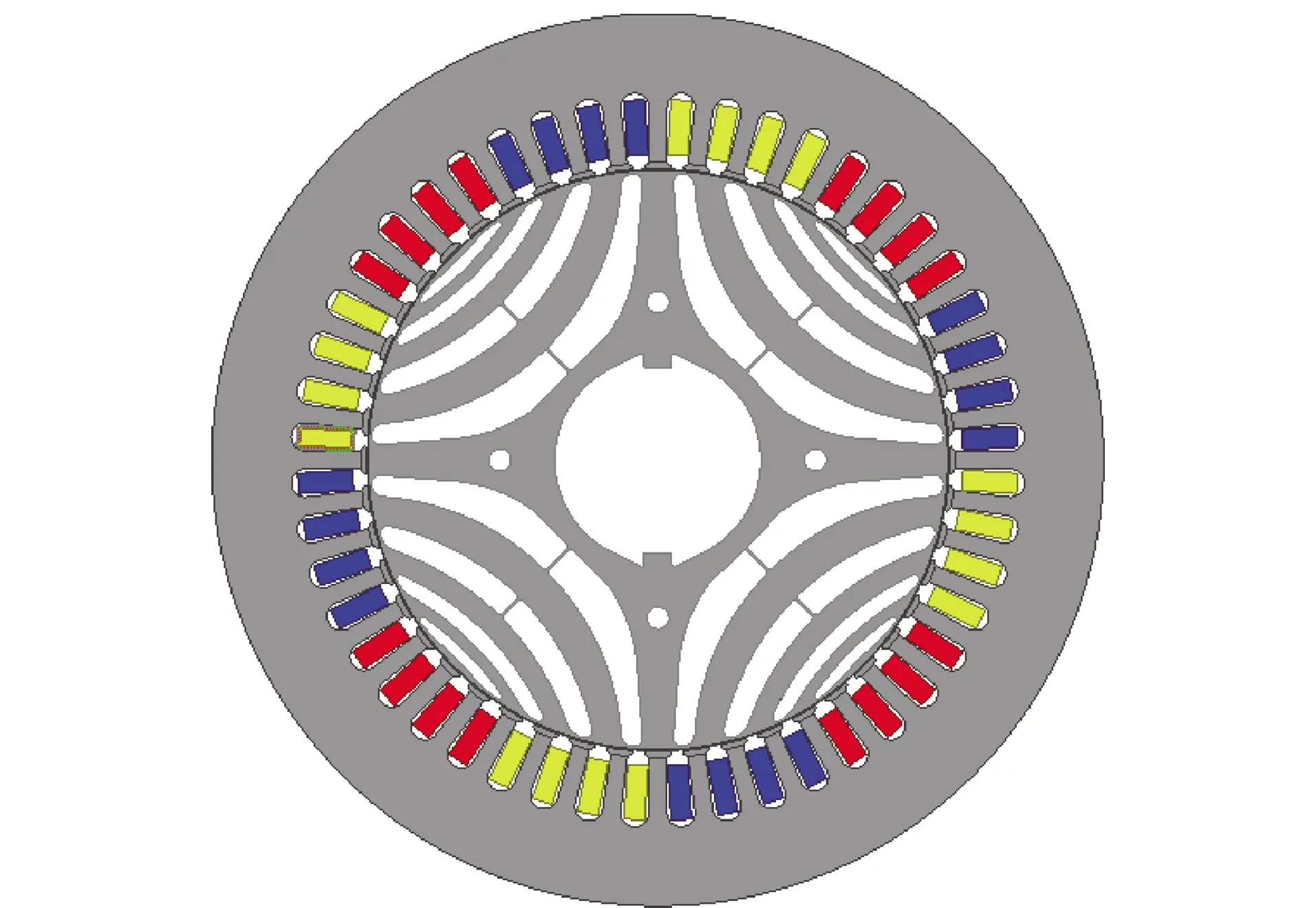
图3 某典型同步磁阻电机拓扑结构Fig.3 Topological structure of a typical synchronous reluctance motor
相比于永磁电机,同步磁阻电机的功率密度和转矩密度稍低,但具有更宽的调速范围、更简单稳定的转子结构以及更低的成本。相比于感应电机,由于同步磁阻电机转子中没有铜耗,其电机效率更高,控制更为简单[10]。由此可见,同步磁阻电机具备更好的综合性能,且考虑到稀有金属为不可再生资源,同步磁阻电机和铁氧体辅助的同步磁阻电机必将成为未来的研究热点。
1.2 电机热管理及冷却方式
在高温和过载情况下,电机绕组温升较大,绕组老化变形,从而导致永磁体性能下降甚至失磁,影响车辆整体性能。因此,电机的热管理技术及其冷却方式是电机研究的重点之一,直接关系到电机能否安全可靠地长期保持高效运行。部分学者通过热导网络优化和先进优化算法有效提高现有冷却系统的散热效率[14-16]。目前在坦克用重载荷电机及其控制方面相关热导网络研究较少,不同冷却介质下概略散热效果比较分析如表2所示。

表2 常见电机冷却方式效果对比Tab.2 Comparison of different regular motor cooling systems
1.3 特殊结构的永磁电机
永磁电机的优点包括高效率、小体积、保养简单等,但其气隙磁场波形往往非正弦波且调节较难,导致转矩脉动较大并存在一定损耗。传统方法可通过特殊结构的永磁电机达到控制磁场的目的,包括具有复励特性的永磁电机和磁场可控的永磁电机。具有复励特性的永磁电机主磁极由永磁材料制成,辅助磁极由导磁材料制成;磁场可控的永磁电机则同时存在永磁材料制成的磁极和电励磁磁极,但此种电机的比功率值将大大减小。
此外,通过对单极永磁体的磁体单元进行排列,将径向式与平行式磁铁通过一定方式组合在一起,将会形成Halbach永磁体结构,如图4所示。
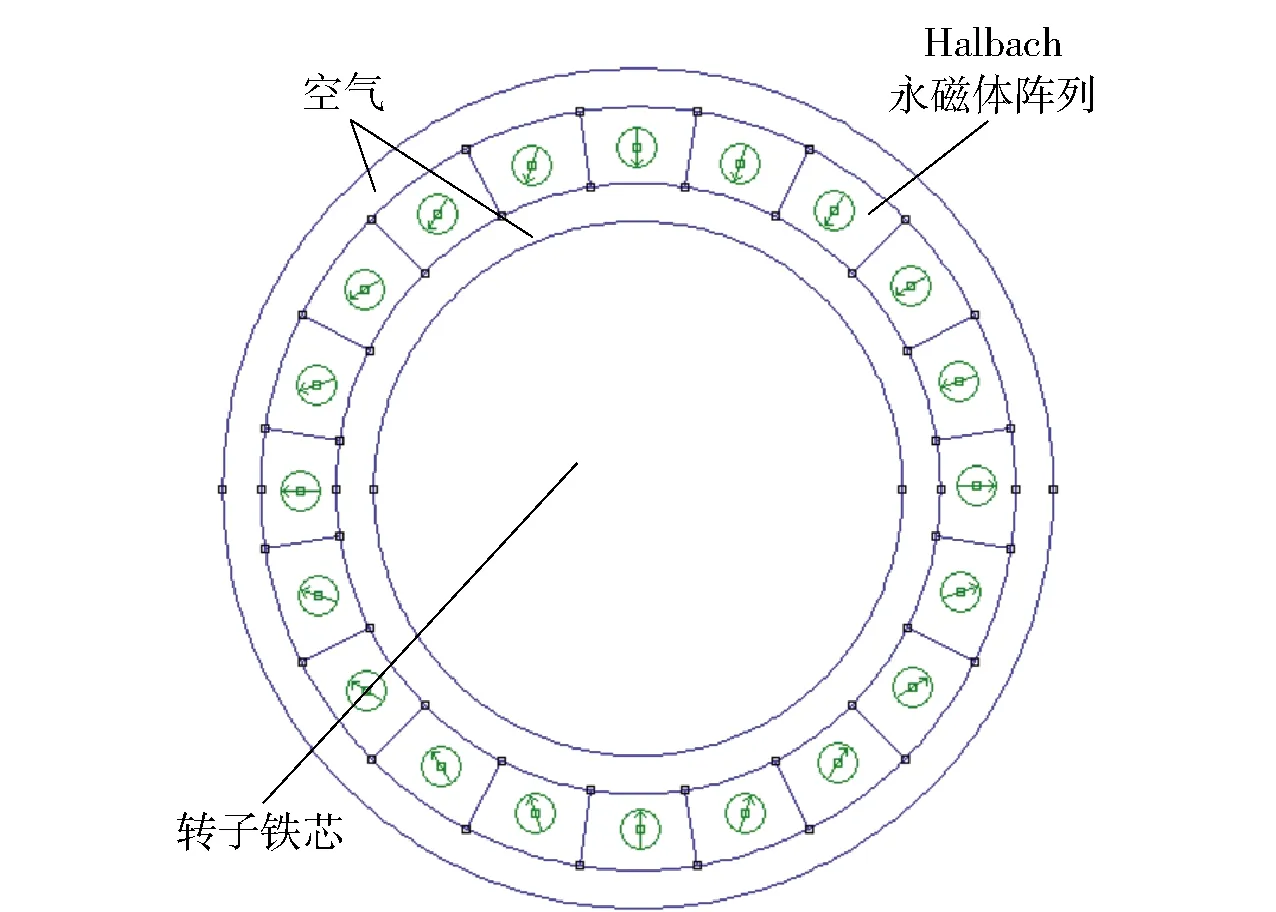
图4 Halbach永磁体阵列Fig.4 Halbach permanent magnet array
采用Halbach永磁体结构的永磁电机气隙磁场将极大地趋向于正弦波,其优点有:高功率密度、高永磁体利用率、低转矩脉动、转子可采用非铁芯材料等。
由于绕组损耗在电机整体损耗中占比较大,降低绕组损耗将有助于提高电机效率,从而间接减小电机尺寸、提高电机功率密度。近年来,随着电传动技术的不断发展,全电化陆战平台对高功率、小体积、高转矩、高转速驱动电机的要求也越来越高。同时,伴随着电机工艺及设备的不断成熟,电机绕组由传统的圆铜线设计逐渐向发卡(扁铜线)绕组设计进步。传统的单层绕组分布式圆铜线电机的槽满率一般为65%~70%,而发卡电机一般可达75%~80%左右。相比于分布式绕组,发卡电机的单个定子槽中的有效铜面积可提高20%以上,并可以通过成型绕组的多层结构显著降低高频下的交流损耗。同时,由于发卡绕组的表面积大,则其散热面积更大;各匝绕组间接触面积更大,空隙更小则其热传导更好。此外,发卡电机绕组结构紧凑,可减小电机体积,从而提高电机功率密度。图5所示为发卡电机绕组示意图。
图5 发卡电机绕组示意图Fig.5 Windings of hairpin motor
2 全电化陆战平台综合电力系统
全电化陆战平台综合电力系统是指利用发动机- 发电机组、动力电池、超级电容等为驱动电机、电磁装甲、电磁武器等提供电能的车载综合电力系统,其优点为高能量利用率、高机动性能、多样化的供电能力、灵活的布局以及隐蔽作战的能力。
全电化陆战平台综合电力系统可单车孤岛运行,也可与其他全电化陆战平台并网,实现交互和能量共享。在并网模式下,单个平台可作为能量保障节点:既是战场能量消耗单元,亦是战场能量存储单元,从而组成战场智能电网。图6所示为全电化陆战平台综合电力系统原型结构。

图6 全电化陆战平台综合电力系统原型结构Fig.6 Structure of integrated power system of all-electricland warfare platform
全电化陆战平台综合电力系统关键技术包括供配电(电能生产与存储分系统)、电能转化(电能变换分系统)、电能管理(管理控制分系统)等。
2.1 电能生产与存储分系统
全电化陆战平台电驱动系统性能包括高速行驶性能、爬坡性能、加速性能、转向性能以及静默行驶性能[17]。根据陆战平台在不同工况下的行驶特性和路面情况,可求解陆战平台在对应工况下的功率需求,并将功率需求作为目标进行系统参数设计。
系统基本参数、电能生产与存储分系统设计主要包括系统供电电压、发动机- 发电机组匹配计算、动力电池参数设计、超级电容参数计算等[18]。
根据全电化陆战平台在不同行驶状态下的功率需求,综合分析电机制造、电力电子器件以及绝缘水平等技术条件,结合民用产品电压等级以确保深入推进军民融合,可综合选择确定全电化陆战平台系统直流网络标称电压等级和电压工作范围。
动力电池参数计算考虑两方面需求:一是作为全电化陆战平台需求功率的补充,以确保陆战平台的机动性能;二是满足静默行驶工况下的功率需求。考虑动力电池放电深度、辅助电气设备功率需求、动力电池与双向DC/DC变换器工作效率、电池荷电状态等因素,可综合确定动力电池的需求容量。
超级电容的主要功能是在负载突变时提供瞬时能量补偿或吸收,以缓解发电机和动力电池的瞬时能量供应负担。此外,超级电容器组也是电磁武器系统和电磁防护系统的重要组成部件。当计入电磁武器和电磁装甲的功率需求时,需要综合考虑陆战平台机动性能与其他系统的能量需求。当无法满足陆战平台的各项技术指标时,则必须增大各能量源容量或在脉冲电源前端加装二级电能缓存装置,抑制瞬时大功率负载冲击[19]。
2.2 电能变换分系统
电能变换分系统可实现全电化陆战平台系统的能量变换与能量管理。作为系统能量变换的核心单元和系统能量管理的重要执行部件,双向DC/DC变换器和脉冲宽度调制(PWM)整流器是电能变换分系统的研究重点。
2.2.1 双向DC/DC变换器
双向DC/DC变换器可实现两个方向的功率变换,即正向升压与反向降压。同时,双向DC/DC变换器还可根据综合管理控制单元发出的指令,在恒流或恒压模式下工作[20]。在全电化陆战平台用双向DC/DC变换器的设计中,为提高功率密度和工作效率,同时减小变换器体积和电流纹波,改善供电质量,可采用交错并联双向软开关DC/DC变换结构,如图7所示。图7中,T1~T4为绝缘栅双极性晶体管(IGBT),D1~D4为反向续流二极管,LEMV为电压传感器,LEMI为电流传感器,C为直流滤波电容,L0为储能电感,L1、L2为饱和电感,整个变换器结构由相同的两个双向DC/DC变换电路并联组成,VL、VH分别为低压侧电压和高压侧电压。由图7可见:在正向升压工作模式下,T2与T4依次导通,相位相差1/2个开关周期;在反向降压工作模式下,T1与T3依次导通,相位相差1/2个开关周期。
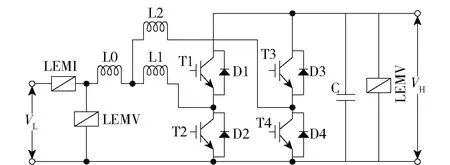
图7 交错并联双向软开关DC/DC变换器结构Fig.7 Structure of parallel-interleaved soft-switching bidirectional DC/DC converter
2.2.2 PWM整流器
PWM整流器可实现能量的双向流动,并具有功率因数高、动态响应快、电网污染小等优点,因此可作为主电路拓扑,以设计启动/发电一体机的控制器[21],如图8所示。图8中,T5~T6为IGBT,D5~D6为反向续流二极管,L为输入电感,VDC为直流侧电压。
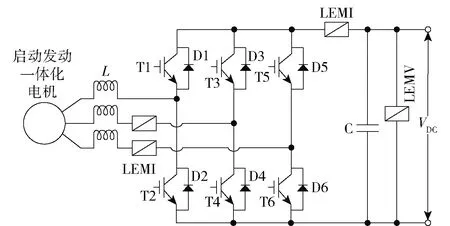
图8 PWM整流器拓扑结构Fig.8 Topological structure of PWM rectifier
2.3 管理控制分系统
2.3.1 综合管理控制单元
综合管理控制单元可根据系统状态信息,向发动机控制器、PWM整流器、动力电池管理系统、双向DC/DC变换器等部件装置以及系统内部各高压接触器发送控制指令,以控制它们协调工作。为保证系统稳定、健康运行,综合管理控制单元的控制逻辑复杂、运算量较大,同时对实时性、抗干扰能力和容错能力要求高,可采用数字信号处理器与可编程逻辑门阵列多核并行的综合管理控制单元[22]。
2.3.2 系统能量管理
系统能量管理可实现各能量源之间的协调控制,使其与负载特性相适应,最大限度满足各分系统的用电需求。同时,在实现上述功能的前提下,系统能量管理还可控制各能量源运行在最优或次优工作模式下,以提高系统工作效率和延长使用寿命[23]。如控制发动机工作在燃油效率高效区、维持动力电池SOC在充放电高效区并合理控制充放电过程、合理规划母线电压以提高超级电容利用率等。
系统能量管理的关键技术还包括系统需求功率高频暂态分量和低频分量的功率分频、低频功率分配、母线电压的状态规划与分配功率修正等。
2.3.3 电能质量分析与管理
全电化陆战平台综合电力系统的各任务负载中存在大量功率变换装置,易造成电网波动,影响供电质量。因此,系统直流网络电流谐波的频谱计算、谐波抑制以及电网质量分析对于提升供电质量、保持系统稳定、增强平台性能有重要的作用。
谐波抑制一般有两种方法,即无源滤波和有源滤波。无源滤波是通过直流母线并联支撑电容滤波,电容容量越大,其抑制能力越强,但会大幅增加滤波装置的体积和成本;有源滤波是通过实时监测补偿对象中的谐波电流,由补偿装置产生的补偿电流改善电网特性,其抑制效果好,可跟踪谐波频率和幅值的变化,但是需要加装额外的补偿装置,导致系统复杂、可靠性降低。此外,还可利用超级电容的暂态快速加载能力,构建基于超级电容的母线谐波抑制结构。但是,由于线路电感的存在,超级电容与功率变换装置滤波电容之间可能会出现电流谐振,且多个电机驱动器滤波电容也可能出现谐振,影响供电质量,甚至导致系统失稳。因此,实际系统中必须考虑线路电感的设计。
3 全电化陆战平台电磁武器
电磁武器是通过将电磁能转换为弹体或战斗部的动能,利用电磁力驱动弹体或战斗部,对敌目标造成毁伤的新概念武器[24]。
3.1 电磁发射技术
常规火炮中,弹丸离开炮口的初速最大约为2.0~2.3 km/s,为突破弹丸初速极限,科研工作者开始将目光转向电磁发射技术。20世纪70年代,澳大利亚国立大学的学者通过一台单极发电机,成功试射了1发3 g的聚碳酸酯弹丸,其初速达到了5.9 km/s,验证了电磁发射技术在火炮发射领域的可行性。按照弹丸初速和电磁发射的长度来分类,电磁发射技术可分为电磁弹射技术、电磁轨道炮技术和电磁推射技术,其具体指标如表3所示。

表3 3种电磁发射技术的具体指标Tab.3 Specific indicators of three kinds of electromagnetic launch technologies
以电磁轨道炮技术为例,国外研究开展较早,相关技术也较为成熟。文献[24-25]详细介绍了美军电磁发射技术、电磁轨道炮技术的发展:2001年美国德克萨斯大学高新技术研究所就举办了电磁发射研讨会,协助美国海军研究局论证了电磁轨道炮,评估了美国海军关于电磁轨道炮的研究现状和技术需求;2005年,美国国会正式拨款美国海军进行电磁轨道炮、激光炮等新型电磁武器的研制。然而,经过16年的发展,美国尚未取得实质性突破进展,已完成的试验基本以陆上模拟样机测试为主。
我国电磁轨道炮的相关研究起步虽晚于美国,但经过国内广大专家学者长期不懈的努力,我国的电磁轨道炮相关技术已取得长足进步,部分关键技术甚至已达到国际领先的水平[26-27]。
相比于传统的火炮发射技术,电磁发射技术的优点包括更高的发射初速、更快的启动时间、更短的发射间隔、更大的发射动能。电磁发射的关键技术包括直线电机技术、脉冲电源技术、弹丸技术等。
3.1.1 直线电机技术
直线电机可产生行波磁场,能够将一定质量的物体加速至一定的速度。美国福特号航空母舰的电磁弹射器上就安装有288个直线电机模块单元,这些直线电机单元模块完全相同,可任意对调更换,因此具有检修方便、维护简易的优点。
在电磁发射技术中,直线电机承载的电流可由数万安培至数兆安培;根据推射弹体的质量,弹体的出口速度范围由每秒几十米至每秒十千米。考虑全电化陆战平台的工作环境与作战需求,电磁发射用直线电机的关键技术还包括电机冷却技术、轨道抗烧蚀技术、多物理场强耦合建模仿真技术、强磁场与应力冲击条件下的定子线圈成形技术等。
3.1.2 脉冲电源技术
由于直线电机工作时需要瞬间的大电流与能量,则要求脉冲电源必须具备高功率、大电流连续脉冲输出,能够提供适应直线电机驱动磁场的稳态或瞬态电流的能力,其具体指标要求:电流幅值为104~106A,电压为1~10 kV,脉冲宽度为10 μs~0.3 s,能量为10~103MJ,脉冲功率为107~109kW[28].
3.1.3 弹丸技术
弹丸即电磁发射的加速推射对象,需能够承载大电流,质量可为10-3~104kg. 由于弹体出口初速高、动能极大,通常不装配炸药,而是完全依靠动能摧毁敌目标。弹丸的关键技术包括超高速一体化制导弹丸技术、一体化弹丸集成与分离技术、高效动能毁伤技术、强感应电流及轻量化动子线圈技术、弹托技术、发射器内壁烧蚀技术等。
3.2 武器的全电化控制
传统的陆战平台武器控制方式包括全液、电液或直流全电驱动,相比之下,全电化陆战平台采用的交流全电控制武器系统能够减少平台整体40%质量、30%体积、提升35%效率,同时大幅提高平台的安全性、可靠性和维修性[6]。
目前,随着全电化技术的普及,以及陆战战术战法的进步,陆战平台的机动性大幅增加,战斗激烈程度大幅加剧,全电化陆战平台将要面对更多的高机动条件下的战斗或战争。为了提高全电化陆战平台在高机动条件下的动态响应速度和自适应能力,保证武器系统的快速随动和炮口稳定,提高射击命中率,则需要加大对高机动条件下全电化陆战平台武器控制系统的控制策略研究和智能化技术探索,以提高全电化陆战平台武器系统自动化程度,减少乘员操作,逐步实现智能武器控制,简化武器控制系统的体系结构。
武器的全电化控制关键技术包括高机动条件下武器系统动力学建模与分析、状态估计、参数辨识及智能化控制等[29]。
4 全电化陆战平台电磁装甲防护技术
全电化陆战平台的电磁防护技术是指依靠电磁能主动拦截来袭炮弹,或使来袭炮弹降低、失去侵彻能力,从而保护陆战平台[30]。
全电化陆战平台的电磁装甲防护技术主要是指电磁装甲技术,相比于传统的其他类型装甲,电磁装甲的应用降低了全电化陆战平台的质量,从而提高了平台的机动性,并提高平台防御能力。
电磁装甲的设想最早是由美国Walker在20世纪70年代提出的[31],随后,美国在电磁装甲的理论研究上迅速推进:文献[32]利用2种通用商业化数值模拟软件对电磁装甲中的破甲弹射流进行了仿真;文献[33]对铜线脉冲电流的磁流体动力学进行了三维ALEG-RA-MHD仿真;文献[34]实现了电磁装甲复杂物理场的仿真还原,得到了电磁装甲的仿真图。试验方面,从20世纪80年代开始,美国陆军研究实验室的武器技术指导委员会分别利用30 mm和50 mm直径的破甲弹对电磁装甲进行了原理试验,对于标准装甲钢,30 mm破甲弹的破甲深度从140 mm降至40 mm,50 mm破甲弹的破甲深度从220 mm降至80 mm[35]. 进入21世纪后,美国陆军研究实验室和陆军坦克动力研究发展与工程中心相继研发了紧凑型高功率脉冲电源和电磁装甲试验设备;荷兰应用科学研究院弹道研究实验室深入研究了电磁装甲对于金属射流不稳定性的影响[36]。
我国关于电磁装甲的研究起步较晚,国内首次电磁装甲原理试验是由兵器工业某研究所于1999年进行的。21世纪以来,中国兵器工业集团公司、军械工程学院等单位均不同程度地开展了电磁装甲理论、仿真、试验的相关研究,掌握了电磁装甲电参数、结构参数的设计准则和优化方法[37-38]。
按照电磁装甲的工作模式,可分为主动电磁装甲与被动电磁装甲两类。
4.1 主动电磁装甲
主动电磁装甲可分为线圈感应式和磁场重接式,由储能电容器、开关、高功率脉冲电源、发射线圈和拦截板组成[39]。其工作原理为:感知系统及时探测发现来袭炮弹,并精确识别其质量、射速等物理特性,并发送给控制系统;控制系统通过计算得到来袭炮弹的弹道轨迹,并在最佳时机向拦截系统发送触发信号;拦截系统接收触发信号后,闭合开关,储能电容器通过高功率脉冲电源和发射线圈,产生高强度磁场,推射拦截板;拦截板在电磁力的作用下发射,并在空中与来袭炮弹相撞,削弱甚至摧毁来袭炮弹的侵彻能力,从而减小或避免全电化陆战平台所受到的攻击[40]。
线圈感应式主动电磁装甲的工作原理为:平面螺旋发射线圈中产生陡上升前沿的大电流,并产生垂直于环面的感应强磁场,同时在拦截板中感应产生涡流。平面螺旋发射线圈产生的感应强磁场与拦截板中产生的感应涡流相互作用,产生强大的电磁力,推射拦截板撞击来袭炮弹,从而保护陆战平台。
磁场重接式电磁装甲工作原理为:螺旋式环形绕制的发射线圈中产生感应强磁场,在启动瞬间该感应强磁场被拦截板分割为上下两部分,当感应有涡流的拦截板产生一点位移时,其另一端隔开的磁场便重接起来,对拦截板产生极大的电磁推力。随着分隔开的磁场不断重接,拦截板不断被加速直至推射出去。
4.2 被动电磁装甲
被动电磁装甲是指以被动方式保护陆战平台的电磁装甲,主要包括接触式电磁装甲、电热装甲以及可储能电磁装甲3种类型。
4.2.1 接触式电磁装甲
图9所示为接触式电磁装甲的基本结构。图9中,I表示流经金属板电极的电流。
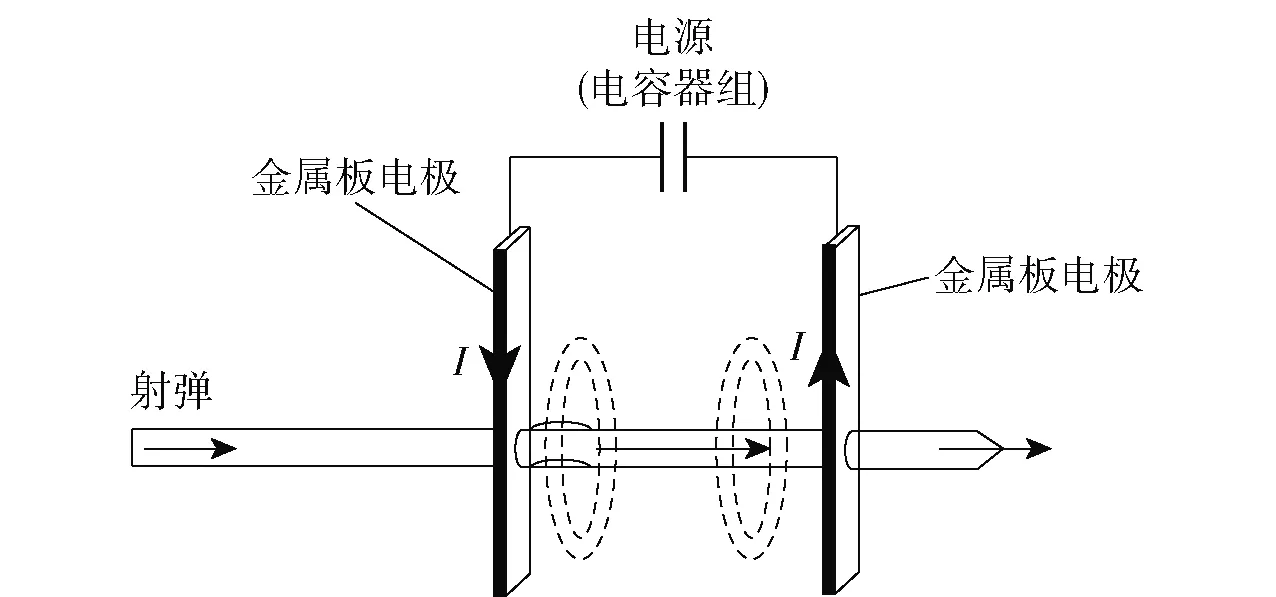
图9 接触式电磁装甲结构示意图Fig.9 Structural sketch of contacted electromagnetic armor
电磁装甲由陆战平台主装甲外相距一定距离的2块钢板、电源和电容器组共同组成,其中一块钢板接地,另一块钢板与电容器组高压端相连,其基本工作原理为:当来袭炮弹穿透两钢板时,2块钢板短路,此时来袭炮弹、2块钢板、电容器组之间构成回路,电容器组开始放电;大电流放电形成的强磁场和放电爆炸冲击波与带电的来袭炮弹相互作用,使来袭炮弹射流产生不稳定的磁流体动力学现象,导致来袭炮弹的射流分散或偏转,从而避免主装甲被击穿或击毁。
4.2.2 电热装甲
电热装甲的结构与电磁装甲类似,也是由2块金属板、电源以及电容器组共同组成。2块金属板间的距离非常小,并以一层很薄的绝缘材料隔离。当来袭炮弹穿透2块金属板时,电源或电容器组通过来袭炮弹进行大电流放电,此时2块金属板间的绝缘材料被加热气化并迅速膨胀,将2块金属板分别向两侧推开,从而干扰了来袭炮弹对陆战平台主装甲的侵彻。
4.2.3 可储能电磁装甲
可储能电磁装甲是结合了电磁装甲与电热装甲特点的一种新概念装甲防护技术。可储能电磁装甲单元由面板、防护板、底板、高储能密度脉冲电容器、正负电极引出线、爆炸导体开关等组成,既是储能装置,也是防护装置。每一个可储能电磁装甲单元皆由螺栓固定于主装甲上,并联连接后总接于高压电缆,由全电化陆战平台的充电装置为其充电。
当破甲弹的射流或穿甲弹的动能杆撞击任一可储能电磁装甲单元,破坏电容器两电极间的绝缘层,造成正负极板间短路,所有并联的电容器通过该短路处放电,放电产生的大电流首先将电容器内较薄的金属箔电极汽化,继而产生高温等离子体。此时,电容器中的其他物质也在高温作用下汽化、膨胀、爆炸并产生冲击波压力,推动防护板沿外法线方向运动并撞击来袭炮弹,使来袭炮弹偏转甚至断裂,从而保护陆战平台主装甲。
4.3 电磁装甲关键技术
4.3.1 高压电容器组技术
电磁装甲工作时所需的能量较大,需要较多数量的车载电容器组,从而增加了全电化陆战平台的整体质量和体积,并进而影响其行驶性能与机动灵活性。为此,高比能量储能装置技术的研究十分必要,以提高储能装置的比能量,降低其对陆战平台机动性的影响。
4.3.2 脉冲电源技术
与全电化陆战平台电磁武器系统一样,高功率脉冲电源技术也是全电化陆战平台电磁装甲防护系统的主要部件,要求储能密度高、储能量大、能够对高压电容器组快速充电。高功率脉冲电源的技术难点在于有限空间或有限质量条件下为全电化陆战平台提供足够的电能。
4.3.3 发射控制技术
如前所述,在主动电磁装甲的防护过程中,控制系统需要迅速判断来袭炮弹的速度、距离、方向以及弹丸的类型、特性等,然后精确计算拦截装置所需的电压、电流、来袭炮弹弹道轨迹、拦截时间、拦截位置等,从而调节输入功率,确定拦截板推射方向、位置、发射时间、发射方向。为解决这一难题,需要构建来袭炮弹与陆战平台的相对参照系,建立数学模型,确定运动目标的运动规律与运动轨迹,求解运动参数,从而控制发射器推射拦截板。
5 总结与展望
本文从全电化陆战平台的驱动电机及其控制技术、车载综合电力系统、电磁武器、电磁装甲防护4个方面详细剖析了陆战平台全电化的主要内容和关键技术,探究了以上关键技术的研究现状,揭示了全电化陆战平台持续发展的技术瓶颈:
1) 在陆战平台驱动电机方面,重点和难点在于高功率密度、高转矩密度、高转速驱动电机的设计,及其配套驱动器、控制器的研制。在现有内嵌式永磁同步电机的基础上,可加大对永磁体材料、电机转子结构、新型散热技术的研究。同时,受永磁体材料不可再生的限制,可适当储备相关无永磁体材料驱动电机的相关技术,如同步磁阻电机、开关磁阻电机等驱动电机新的设计与控制技术。
2) 全电化陆战平台各电能源装置的供电特性和各用电设备的负载特性具有多样化的特点,需要实现各系统间的信息互通,对各电能源装置、各用电装置进行整合,提高用电安全性和可靠性,保证供电质量。系统包含多个不同特性的电能源装置和脉冲功率装置,需要快速而频繁地闭合、断开大功率电力传动装置和高功率密度电力电子变换器等,易产生较强的电磁干扰。同时,受限于陆战平台有限的内部空间,不同装置间的相互传导干扰和辐射干扰几率大大增加。因此,平台的设备故障检测和健康状态监测技术需要关注。同时,高性能的电力电子器件(如SiC电力电子器件的推广和普及)和电磁兼容的分析与控制也是陆战平台全电化技术必须考虑和研究的关键课题。
3) 在电磁武器和电磁装甲防护领域,需要加大对高功率脉冲电源、直线电机技术、超级电容技术的投入和研发,以确保能够满足全电化陆战平台的空间限制和各系统的功率需求。
总之,以电驱动、电磁武器、电磁装甲防护等为关键技术的陆战平台全电化技术突破了传统陆战平台的性能瓶颈,提高了陆战平台的作战能力,增强了陆战平台的防护系统,促进了陆战平台无人化、智能化、信息化的发展。尤其是未来无人陆战平台的研制,更加强调全电化技术的稳定可靠。
综上所述,陆战平台全电化是必然的发展方向,其涵盖技术范围广,研发难度大。然而,受限于现有技术发展水平,还不能很好地发挥全电化陆战平台的综合性能,需要进一步深入研究。