Application of unmanned underwater vehicles in polar research
2021-11-12ZENGJunbaoLIShuoLIUYa
ZENG Junbao, LI Shuo& LIU Ya
Application of unmanned underwater vehicles in polar research
ZENG Junbao1,2,3*, LI Shuo1,2,3,4& LIU Ya1,2,3
1State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China;2Institutes for Robotics and Intelligent Manufacturing, Chinese Academy of Sciences, Shenyang 110169, China;3University of Chinese Academy of Sciences, Beijing 100049, China;4Center for Ocean Mega-Science, Chinese Academy of Sciences, Qingdao 266071, China
The importance of polar ice as vital components of the global ocean–climate system is widely recognized. In this paper, we demonstrate the importance and urgency of polar research, describe the primary characteristics of sea ice and ice shelves, and outline the current status and difficulties associated with sub-ice research. We highlight the importance of Unmanned Underwater Vehicles (UUVs) as important tools for oceanographic research. We present recent progress in UUV deployment in sub-ice research in the Arctic and the Antarctic, and review the latest international developments in UUV structure, navigation, payload, and field operation. Moreover, Chinese polar UUVs and their deployments in the polar regions are presented in detail. Key technologies and solutions regarding polar application of UUVs (e.g., sub-ice navigation and positioning, energy supply and data transmission, and sub-ice guidance and recovery) are discussed. Given the current worldwide attention on polarscience, the potential future directions of UUV-related polar research (e.g., observations under Antarctic ice shelves, long-range surveys beneath Arctic sea ice and application of intelligent technology) are discussed.
unmanned underwater vehicle, polar ocean, scientific investigation, key technologies, development trend
1 Introduction
Despite the increasing recognition of the importance of both the Arctic and the Antarctic to the global ocean–climate system in recent years, the polar regions are still among the least understood places on Earth (Bell, 2008). The polar regions have undergone rapid changes in past decades, and have considerably impacted the Earth’s climate and ecosystems (Andresen et al., 2012). For example, the volume of the Antarctic ice sheet and the areal extent of Arctic sea ice have both decreased rapidly over the past 40 years as a result of climate change. Climate change scenarios forecast the complete disappearance of summer Arctic sea ice in the next 50–100 years. The projected reduction in sea ice could lead to environmental destruction and species extinctions (Stein et al., 2017). The polar ocean also interacts with the ice shelves that are floating on it. Basal melting of ice shelves creates seawater-filled cavities below the shelves, which have considerable impacts on the ocean; ice melt adds freshwater to the ocean; heat is transferred between the shelves and the ocean because of the temperature difference between the upper and lower surfaces of the shelves (Shi, 2018). Therefore, polar research is receiving increasing levels of attention.
The study of sea ice and the sub-ice environment is a very important branch in Antarctic and Arctic research. Sea ice and sub-ice research mainly focuses on the changes of sea ice thickness, sea ice optics, bottom morphology of ice environments, sub-ice hydrology and seabed topography. However, traditional research methods are unable to support the exploration of sub-ice environments over large areas and in environments involving thick ice and severe weather. Currently, most sea ice and sub-ice data are collected by buoys that are frozen in the sea ice over long periods. As a result, the data provide only information for single points in time and space. Field observations of ice shelves and the sub-ice environment that cover large areas can be used to validate ice buoy data, and provide information on the relationships between the bottom surface of the sea ice cover, seabed topography and ocean circulation, and the interactions between ice shelves, sea ice, and seawater. This can be achieved by using Unmanned Underwater Vehicles (UUVs), which are advanced motion platforms that can carry payloads of scientific instruments. They can be used to conduct continuous observations over large areas of subglacial lakes or ice shelves in the Antarctic, or in the sub-ice environment in the Arctic Ocean, and contribute to the development of polar research (Li et al., 2004).
In this paper, we summarize the primary features (e.g., structure, navigation, payload, and field operation) of the UUVs that have been used by the international scientific community for polar research over recent decades. We discuss the key technologies related to UUV development, present the UUVs developed in China and their deployment in the polar regions, and identify prospects for future development of UUVs for polar research.
2 Deployment of UUVs in the polar regions
The history of UUVs extends over more than 60 years. The Special Purpose Underwater Research Vehicle developed by the University of Washington (USA) in 1957 was the world’s first Autonomous Underwater Vehicle (AUV). Tethered UUVs are also known as Remotely Operated Vehicles (ROVs), and untethered UUVs are referred to as AUVs. Unmanned underwater vehicles have generally been used for ocean surveys, underwater salvage, and military purposes, and were first deployed in the polar regions in the 1990s. They are currently used to explore ice shelves and ice lakes in the Antarctic, and the sea ice and sub-ice environment in the Arctic Ocean. Details of some UUVs that have been deployed in the polar regions are presented in Table 1.
Table 1 Summary of some UUVs that have been deployed in the polar regions
2.1 Deployment of UUVs in the Antarctic
Two types of UUVs have been used under ice in the Antarctic: small UUVs have been deployed through holes in the ice, and larger UUVs have been deployed at the margins of ice shelves.
The Icefin underwater robot was developed at the Georgia Institute of Technology (USA) (Figure 1), and has been used to explore extreme environments such as Antarctic subglacial lakes and ocean cavities under ice shelves. Its deployment is supporting the development of techniques that could be used in future explorations of Europa’s inner ocean world. Icefin has a range of 3.5 km, and is relatively small and light. Owing to its small diameter, Icefin can be deployed through a hole in the ice to explore the environment under an ice shelf or sea ice. A small-diameter optical fiber tether is used for deployment and recovery of the vehicle, and for real-time communication and control (Spears et al., 2016). In 2014, Icefin was tested under sea ice near McMurdo Station. A single deployment of Icefin through the McMurdo Ice shelf collected data during an under-ice voyage that lasted approximately 12 h. After an upgrade, the vehicle was deployed successively under sea ice, the Erebus Glacier Tongue, and the McMurdo Ice shelf between late October and early December 2017 (Meister et al., 2018). In February 2020, the Icefin team conducted two explorations under the Ross Ice Shelf and the Thwaites Ice Shelf in West Antarctica.
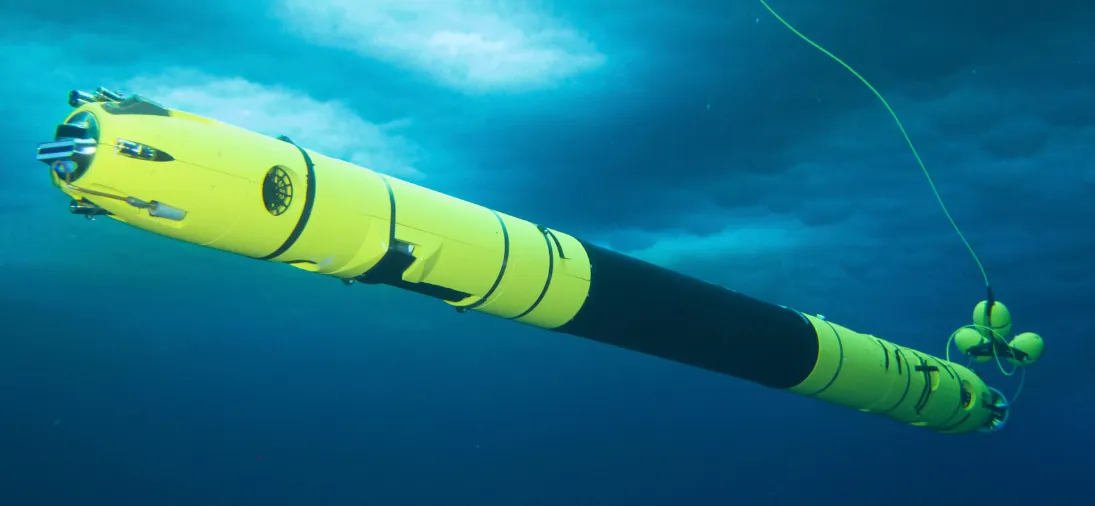
Figure 1 The Icefin underwater robot (Georgia Institute of Technology, 2020).
The SCINI ROV was developed at Moss Landing Marine Laboratories (USA) and was deployed in Antarctica during 2007–2011. Unlike most ROVs, SCINI was in the shape of a slender torpedo (Figure 2), and could be deployed through a hole of 20-cm diameter in the ice. The SCINI is equipped with two video cameras and two sets of lights with scaling lasers. Its maximum depth capability is 300 m. A long baseline acoustic positioning system is used for navigation (Burnett et al., 2015). During the 2009 field season, SCINI was deployed 37 times in 2 months; the average (maximum) duration of the dives was 3 (5) h. For camera-looking missions, SCINI was flown close to the seafloor (0.5–1 m above the seafloor) and at a slow speed (0.1–0.5 m·s−1). Owing to its size and shape, SCINI is suitable for accessing the sub-ice environment via a small hole through the ice. The many successful deployments have also demonstrated that SCINI can travel at higher speeds than traditional ROVs (Cazenave et al., 2011).

Figure 2 The SCINI ROV (Burnett et al., 2015).
The Endurance AUV, developed by Stone Aerospace Inc. (USA), was deployed operationally in Lake Bonney in Taylor Valley. It is in the shape of a compressed sphere (Figure 3). It has four blocks of syntactic foam that form a hemispherical flotation pack to stabilize pitch and roll, and six electric thrusters for direct control of the remaining four degrees of freedom. For three-dimensional (3D) mapping of biophysical parameters (e.g., conductivity, temperature, and pH), Endurance is equipped with a small instrument that comprises nine physical and biological probes. It also carries 300-W high-intensity discharge lighting and three cameras to record underwater footage (Gulati et al., 2009). It was deployed twice in 2008 and 2009 to explore the western end of Lake Bonney. It logged 243 h of sub-ice operational time while traversing a total cumulative distance of 74 km beneath the ice. It completed a full 3D bathymetry and glacier face geometry survey over a horizontal area of 1.06 km2at an average raw resolution of 22 cm (Richmond et al., 2011).

Figure 3 The Endurance AUV (Richmond et al., 2011).
In February 2020, Australian marine biologists used a micro ROV to explore the sub-ice environment around Davis Station, as part of the environmental assessment for the proposed Davis aerodrome. The micro ROV has a diameter of 35 cm, and is equipped with eight thrusters and three cameras (Figure 4). It was deployed through a hole in a sea ice floe that was more than 1 m thick. Its deployment allowed the development of methodologies that use cameras to support long-term sub-ice monitoring of the potential impacts of the aerodrome on local ecosystems. Data collected during the deployment revealed highly diverse marine ecosystems around the station, which have been hitherto unknown (Australian Antarctic Division, 2020).

Figure 4 The Australian micro ROV (Australian Antarctic Division, 2020).
The Autosub series of AUVs, developed by the Southampton Oceanography Centre (now the National Oceanography Centre, Southampton) in the UK, represent one of the most outstanding examples of AUVs used in polar research. Autosub2 was deployed several times during 2001–2005 to explore the sub-ice environment and to allow researchers to gain experience in AUV operation in the polar regions (Nicholls et al., 2006). Autosub3 was built in 2005, and has a range of 350 km at a speed of 1.5 m·s−1(Figure 5). It is equipped with a 150-kHz downward- looking acoustic Doppler current profiler (ADCP) and a 300-kHz upward-looking ADCP. It can travel at constant depth or altitude as an AUV, or profile continuously from lower to upper depths as a glider (Jenkins et al., 2010). In January 2009, Autosub3 was deployed from the ice breaker R/V.to explore the ice shelf of Pine Island Glacier, to map the seabed and the base of the ice shelf (Wadhams, 2012; Wynn et al., 2014), and to determine where and how heat is transferred from the inflowing lower-layer waters to the outflowing upper waters (Dowdeswell et al., 2008). During this mission, Autosub3 spent 94 h under the ice shelf of Pine Island Glacier, traveled a total cumulative distance of 510 km, and the maximum penetration under the ice shelf was 61 km (McPhail et al., 2009).

Figure 5 The Autosub3 AUV (National Oceanography Centre, 2005).
The latest in the Autosub series is the long-range Autosub6000 (popularly named Boaty McBoatface; Figure 6), which can dive to a depth of 6000 m and has a maximum range of 1000 km. It is fitted with upward- and downward-looking ADCPs, two conductivity–temperature– depth (CTD) sensors, and chlorophyll, turbidity, and turbulence probes. In March 2018, it was deployed to measure the salinity and temperature of the water beneath the Filchner–Ronne Ice Shelf. The data from this mission are being used to assess the future stability of the Filchner Ice Shelf and the contribution of polar ice sheets to global sea level rise (British Antarctic Survey, 2018). During this mission, the Autosub6000 traveled 108 km, reached a depth of 944 m, and was under the ice for 51 h.

Figure 6 The Autosub6000 AUV (Smith, 2019).
To understand the roles of Antarctica and the Southern Ocean in the global climate system, the Australian Antarctic Division procured nupiri muka—an Explorer class AUV (Pyper, 2018) manufactured by International Submarine Engineering (ISE) Ltd. (Canada). Nupiri muka was equipped with an Edgetech 2205 (sonar), Teledyne RD Instruments 300 kHz (navigator), Imagenex obstacle avoidance sonar (OAS), and orthogonal fluxgate Magnetometer (Figure 7), andwas deployed beneath the Sørsdal Glacier near Davis Station in February 2019 (Australian Antarctic Division, 2019). It performed three sub-ice missions, and sailed a total of 2.2 km under the ice shelf; the longest single voyage was 660 m. It dived to a maximum depth of 1175 m. In February 2020, nupiri muka was deployed beneath the Thwaites Ice Shelf. It completed six dives with a cumulative underwater distance of 75 km; the longest single voyage was 60 km (AUV Peter, 2020).
Researchers at the University of Gothenburg (Sweden) have also started to explore Antarctic ice shelves using an AUV. They modified a Hugin AUV purchased from Kongsberg Maritime A/S (Norway), and named it Ran. Ran was equipped with an EM2040 multibeam sonar and other sensors for environmental detection (Figure 8). It was deployed beneath the Thwaites Ice Shelf during 2–6 March 2019, and completed two ice shelf exploration missions. The maximum penetration under the ice shelf was 3 km. A topographic map was created from the data acquired by the multibeam sonar. Other data acquired by Ran suggested that warm water from the deep ocean is welling up from three directions and mixing beneath the ice shelf, which has increased fears of a collapse of the Thwaites Glacier that could raise global sea level by more than 0.5 m (Tollefson, 2020).

Figure 7 The nupiri muka AUV (Australian Antarctic Division, 2019).
Figure 8 The Ran AUV (The International Thwaites Glacier Collaboration, 2019).
Seaglider (Figure 9) is an underwater glider developed by the University of Washington (USA). It is now produced under license by Kongsberg Maritime A/S (iRobot Seaglider, 2019). It has a maximum range of 4600 km and an autonomy of almost 10 months. It can be equipped with a turbidimeter, and sensors to measure dissolved oxygen, CTD, and other parameters for oceanographic research. In 2018, the University of Washington started a 1-year mission to survey the cavity beneath the Dotson Ice Shelf in Antarctica using Seagliders. There were 18 deployments; the longest voyage was 140 km. At one point, a Seaglider traveling beneath the ice reached a maximum distance of 40 km from the outer edge of the Dotson Ice Shelf (Hickey, 2019).

Figure 9 The Seaglider (image credit: Paul Allen Philanthropies).
2.2 Deployment of UUVs in the Arctic
The Nereid Under-Ice hybrid ROV was designed for oceanographic research under ice. It was developed by the Woods Hole Oceanographic Institution (USA) in collaboration with the Johns Hopkins University (USA) and the University of New Hampshire (USA). It uses an Inertial Navigation System (INS)/Doppler Velocity Log (DVL) for sub-ice navigation, a Blueview P900 imaging sonar for obstacle avoidance, and a 20-km fiber optic tether and 3.5-kHz acoustic modem for communication (Figure 10, Bowen et al., 2014). In July 2014, it was deployed from the German ice breaker R/Vto investigate the sea ice in the northern Fram Strait between Greenland and Spitsbergen. Four dives were performed, of which only the final two were research dives. It traveled a total cumulative distance of 5.6 km under ice (Katleinet al., 2015).

Figure 10 The Nereid Under-Ice hybrid ROV (Katlein et al., 2015).
The Polar Autonomous Underwater Laboratory (PAUL) AUV (Figure 11) is a BF-21 AUV purchased by the Alfred Wegener Institute for Polar and Marine Research (AWI, Germany) from Bluefin Robotics (USA) in 2003. It is equipped with various instruments including sensors for the detection of nitrate, oxygen, and fluorescence. The main objectives behind the deployment of PAUL in the Arctic were the investigation of the biogeochemical processes in the surface waters, analysis of the stratification of the upper water column in the marginal ice zone, and examination of dynamic ice–ocean interactions. Since 2010, PAUL has been used for scientific surveys in the Fram Strait (Wulff et al., 2013).

Figure 11 The PAUL AUV (AWI, 2020).
The Explorer AUV was developed by ISE (Figure 12). In December 2008, ISE was awarded a contract from National Resources Canada to build two AUVs for the collection of data to support Canada’s claim in the Arctic under the United Nations Convention on the Law of the Sea (Crees et al., 2010). These AUVs were subsequently improved to include additional energy and sub-ice charging, and were equipped with a long-range homing and short-range positioning system that was developed by Defence Research and Development Canada. The updated Explorer AUVs have a range of 450 km at a speed of 1.5 m·s−1. The payload includes an EM2000 multibeam sonar and a Sea-Bird SBE 49 CTD (McFarlane et al., 2015). In 2010, one of the AUVs was used for a survey in the Canadian High Arctic. In this expedition, two camps were placed on the ice. The main camp was at 78°N. The Explorer was launched from the main camp through a large hole that has been drilled in the ice; the hole was covered by a half-dome tent. A small hole was drilled in the ice at the remote camp, which was 300 km from the main camp, and allowed for sub-ice charging of the AUV and data download. The Explorer was under the ice for almost 12 d, and traveled approximately 1000 km (Kaminski et al., 2010).

Figure 12 The Explorer AUV (Kaminski et al., 2010).
The Seabed AUV was developed by Woods Hole Oceanographic Institution (USA). It is an example of a class of AUVs that can fly slowly or hover over the seafloor at depths of 6000 m. Seabed consists of two hulls connected by a pair of aluminum spars (Figure 13). The lower pressure housing contains the batteries and the fiber optic gyro, while the upper pressure housing contains the computer that controls the vehicle. Seabed has an autonomy of 24 h at a speed of 0.35 m·s−1. Puma and Jaguar are a pair of Seabed AUVs that were used in the polar regions. In summer 2007, Puma and Jaguar made nine deep dives, five of which produced useful scientific data (Kunz et al., 2009). Jaguar was also deployed in Antarctica, where it was used to map out a high-resolution 3D view of sea ice morphology (Williams et al., 2015; Singh et al., 2017).

Figure 13 The Seabed AUV (Designboom, 2014).
The Beast is a V8 Sii ROV purchased by AWI, and has been used extensively beneath Arctic sea ice (Figure 14). It has a 300-m tether, which limits its horizontal range and diving depth to a maximum of 300 m. Its navigation system relies on video streams from a forward-looking high- definition video camera and three other cameras. It uses a PA-500 high-precision altimeter and a Micron Digital Sonar Technology (DST) scanning sonar to avoid collision with the ice. The scientific payload includes radiance, irradiator, CTD, oxygen, nitrate, and pH sensors in addition to the multibeam sonar used for sea ice mapping. In autumn 2016, AWI used the Beast to measure the thickness, temperature, salinity, optics, and other physical parameters of Arctic sea ice (Katlein et al., 2017).

Figure 14 The Beast ROV (Katlein et al., 2017).
Gavia is a small AUV (Figure 15) developed by Hafmynd Ltd. (Iceland). It has a maximum speed of 3.1 m·s−1(6 kn) and a cruising speed of 2.1 m·s−1(4 kn). In the polar regions, its maximum diving depth is 600 m. Its inertial navigation system was tested in Pavilion Lake (British Columbia, Canada) in January 2007. The ice of Pavilion Lake is clear and Gavia could be easily located from its navigation lights. The safety of Gavia under the ice was further ensured by communication via WLAN through the ice when the antenna tower of the vehicle was in contact with the lower surface of the ice. In April 2007, tests were successfully completed under sea ice near Alaska (Yeo, 2007).
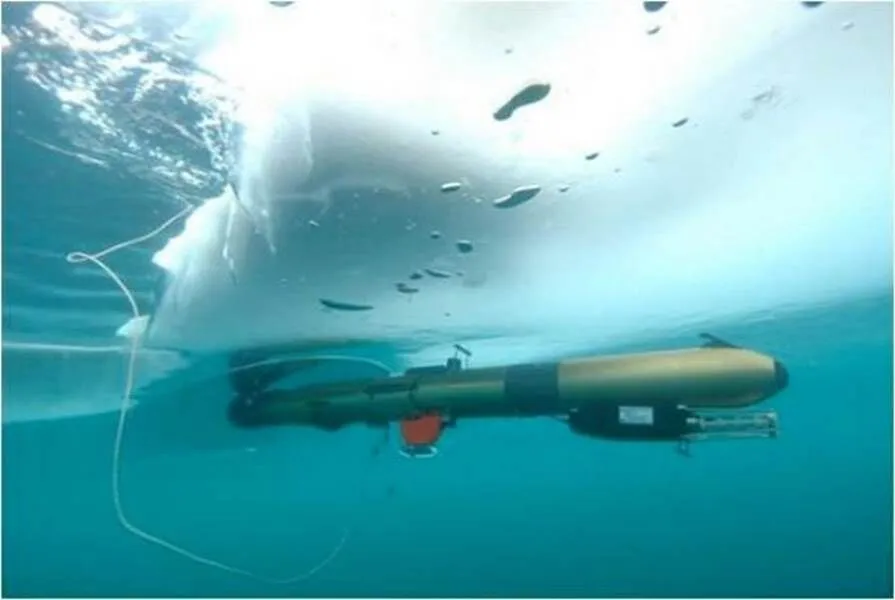
Figure 15 The Gavia AUV (Norgren et al., 2014).
The REMUS-100 AUV was used to make hydrographic measurements beneath coastal sea ice in offshore waters near Barrow, Alaska (Figure 16). It can travel for 8–10 h at a speed of 1.5 m·s−1(3 kn). It was equipped with CTD and Environmental Characterization Optics sensors, which could be used to measure chlorophyll, colored dissolved organic matter, and turbidity. It was also equipped with an MTS 900-kHz sidescan sonar to observe the underside of the sea ice. In March 2010, the vehicle completed 8 d of fieldwork in offshore waters near Barrow during four underwater missions. Overall, 14 km of track lines beneath a coastal ice floe were obtained from the four missions, and each mission was successfully terminated using net-capture recovery (Kukulya et al., 2010).
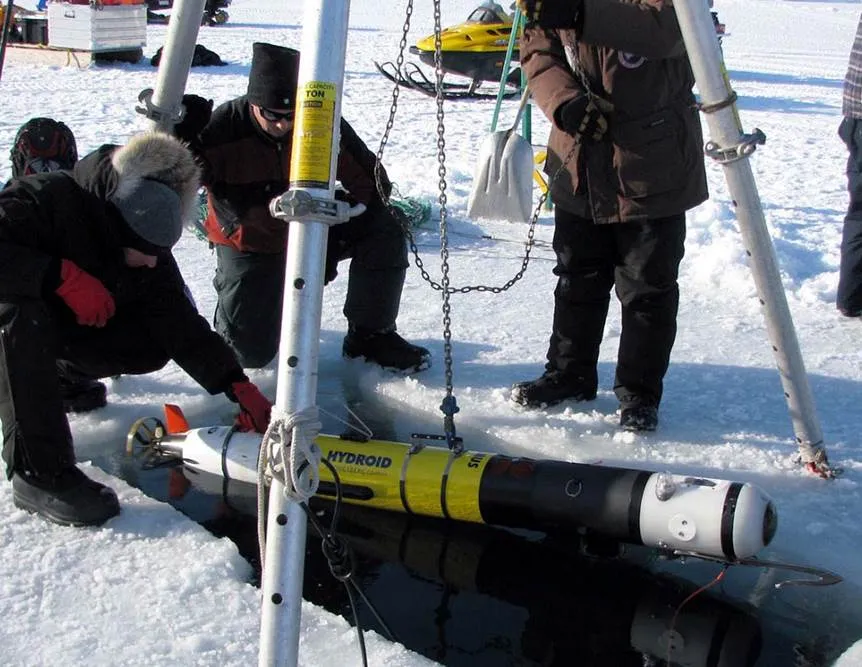
Figure 16 The REMUS-100 AUV (Kukulya et al., 2010).
2.3 Brief summary
Sections 2.1 and 2.2 show that UUVs are playing an increasingly important role in polar research. The data acquired by UUVs under Antarctic ice shelves can be used to monitor the evolution of grounding lines, and help improve our understanding of ice–ocean interactions, water masses and circulations in sub-ice shelf cavities, and freeze–thaw changes on the bottoms of ice shelves. Unmanned underwater vehicles can be deployed under Arctic sea ice to perform under-ice surveys (e.g., near-ice inspection/mapping and boundary layer investigations); data acquired by UUVs can be used to improve our understanding of underwater biodiversity and drivers of sea ice melting. Limitations of current ocean and sub-ice observation technologies can be overcome by UUVs; UUVs can expand the spatiotemporal coverage of sub-ice exploration, and provide an advanced platform for 3D exploration of the polar oceans.
3 Chinese development and deploy- ment of UUVs in the polar regions
Since the 1980s, China has conducted 37 Antarctic and 11 Arctic expeditions. To support polar research, Chinese scientists have also developed a variety of UUVs, including the HaiJi ROV, Polar ARV, TS-1000 AUV, and Haiyi glider (Lei et al., 2017). These autonomous or remote control UUVs carried various scientific payloads to survey the sub-ice marine environment in the polar regions.
The Polar ARV, which was developed by the Shenyang Institute of Automation of the Chinese Academy of Sciences (CAS), and funded by the Chinese National Key R & D Program (Chinese National 863 Program), has been used mainly for surveys beneath Arctic sea ice. It has the characteristics of both an AUV and an ROV, and has onboard power and fiber optic technology (Figure 17). It can conduct a survey autonomously within a certain range, and can also be directed towards a fixed-point target. Its scientific payload includes a radiometer, an altimeter, two cameras, and CTD and pressure sensors, which can measure ice thickness, spectral irradiance, conductivity, salinity, temperature, and pressure, and record videos and images. It was built in 2008, and has been deployed three times during Chinese National Arctic Research Expeditions. In summer 2008, it was launched at sea for the first time, and it dived under ice in the marginal ice zone. In summer 2010, it was launched from the Chinese icebreaker R/V, and was recovered from a hole drilled in a sea ice floe at 87°N; the thickness of the floe was 2 m. After an upgrade, the Polar ARV was deployed in 2014. It completed three dives; the total cumulative distance under ice was 9 km (Zeng et al., 2015).

Figure 17 The Polar ARV.
The TS-1000 AUV (Figure 18), which was also developed by the Shenyang Institute of Automation, CAS, has been used for long-term fixed-point profile observations. It has a variable ballast system that allows it to move up and down over a fixed point, and it can travel underwater for more than 1000 km over a duration of more than 30 d. In January 2019, during the 35th Chinese National Antarctic Research Expedition, the TS-1000 was deployed in the Ross Sea at approximately 75°S to collect thermohaline profile data. In January 2020, during the 36th Chinese National Antarctic Research Expedition, it was deployed in the Ross Sea. It conducted 17 profile survey missions, and traveled a total of 68 km.

Figure 18 The TS-1000 AUV.
The Haiyi series of gliders can perform surveys in 99.8% of the global oceans, and can carry different scientific payloads to meet mission requirements (Figure 19). In 2018, during the 9th Chinese National Arctic Research Expedition, a Haiyi glider was deployed in the Bering Sea. It completed 45 d of fieldwork, performed 229 profile missions, and traveled a total of 843 km (Tao, 2019).
4 Key technologies of polar UUVs
Unmanned underwater vehicles need to be adapted to the special environments of the polar regions. Although they have been used to support research of ice shelves, sea ice, and polar oceans, several key technological problems remain. These include navigation and localization, homing, and recovery under ice, as well as charging and data exchange under ice.

Figure 19 The Haiyi glider.
4.1 Navigation and localization in polar regions
Unmanned underwater vehicles on sub-ice missions are launched and retrieved through a hole in the ice. To ensure that the vehicles can find the retrieval location, a high level of navigational accuracy is required. High coordinate precision is also needed to meet the scientific objectives of mapping and sampling. However, owing to geomagnetic effects, traditional compasses cannot be used in the polar regions, and INS/DVL is the navigation system used by most polar UUVs. Unfortunately, INS/DVL develops cumulative error over the long term, and errors are accentuated when the UUV is beyond the range of the DVL. Therefore, it is essential to improve the navigational accuracy of UUVs for sub-ice deployment. For example, the ISE Explorer AUV uses an acoustic beacon to eliminate the cumulative error. In this case, seven Teledyne telesonar modems are used for vehicle telemetry; six of them are put along the circumference of a nominal 1-km radius circle. Each modem is collocated with a Global Positioning System (GPS) receiver and a Freewave radio; the seventh modem is located at the AUV docking location. When the AUV is in operation, its modem issues a broadcast query to all modems within receiving range. The location of the AUV is then determined by optimally inverting the set of ranges acquired acoustically and using a table of known modem locations. This localization system can provide root mean square location errors of the order of 2–3 m when the AUV is stationary and <20 m when the AUV is in motion (Kaminski et al., 2010). Autosub3 uses an ultra-short baseline to locate the AUV when it is within a range of 3.5 km from the parent ship (McPhail et al., 2009). Terrain-aided high precision inertial navigation systems are also gaining popularity. In these systems, UUV locations are obtained by matching terrain information with a terrain database that has been established earlier and combining it with inertial navigation information to improve navigation accuracy (Zhang et al., 2015). The National Oceanography Centre of the UK plans to use a terrain-aided system for the long-range navigation of Autosub AUVs. This system will enable the Autosub to travel thousands of kilometers under the Arctic sea ice and ultimately traverse the Arctic Ocean. A terrain-aided navigation simulator has been developed using the physical features of the seabed to estimate the position of the AUV, which is obtained by comparing depth measurements with a known terrain map (Salavasidis et al., 2018).
4.2 Homing and recovery under ice
For sub-ice investigations, especially in the Arctic, most AUVs are deployed and recovered through a hole in the ice, which requires the AUV to return to the hole after the mission. However, sea ice moves with the ocean currents and therefore the absolute position of the hole changes. Placing a sonar at the hole and letting it guide the AUV back to the site has proven to be the most reliable method for recovery. To provide acoustic guidance, ISE developed the Long-Range Acoustic Bearing (LRAB) long-range homing system, which is effective at ranges in excess of 100 km when operated at full power (~189 dB) (Kaminski et al., 2010). Autosub2 was also equipped with a guidance system that had an operational range of 15 km. In this system, the shipboard homing beacon transmits regularly spaced swept frequencies (chirps), centered at 4.504 kHz. Once the vehicle had detected four consecutive transmissions, the AUV would determine the direction of the homing signal, enter homing mode, and move toward the source of the signal (Dowdeswell et al., 2008). When the Seabed AUV was deployed under the Arctic sea ice, it was teleoperated back for recovery using two ship-mounted navigation beacons that were used by engineers onboard to calculate a vehicle location fix. The AUV operators sent a sequence of acoustic commands directing depth and bearing changes so that the AUV could approach the parent ship. The REMUS-100 is recovered using a cylindrical net, which is a fishing net attached to two aluminum rings. The upper ring floats and the lower ring is attached to a lead weight; the net is under tension during deployment. The vehicle is equipped with a net-capture hook on its nose, which is used in conjunction with the net for sub-ice capture and recovery of the vehicle (Kukulya et al., 2010). For safe recovery, Gavia used a Kevlar rope with neutral buoyancy; in case of emergency, a small ROV and divers also participated in the recovery (Yeo, 2007).
4.3 Charging and data exchange under ice
Most polar research expeditions require UUVs that can travel hundreds to thousands of kilometers. However, owing to their limited energy sources, most AUVs are unable to extend their operating range. Furthermore, under-ice operations preclude the possibility of regular surfacing for positional calibration and data exchange. Therefore, it is necessary to extend the duration of missions and allow sub-ice data retrieval. Increasing the number of batteries onboard the vehicle is the simplest way to extend mission duration; however, this would increase UUV size. Nuclear reactors are currently used in submarines, but they are impractical for UUVs owing to the limited size of the UUV and the environmental risks involved. Engineers from ISE designed a system for sub-ice charging and data transmission. At a remote camp, a 1.5 m square hole was drilled into the drift ice, and was used to recharge the AUV, substantially reducing the overall logistical costs. The system used for charging and docking is fixed under the hole, and the AUV is captured with the help of an ROV; the charge time is 12–15 h. The system can also be used to rotate the AUV for INS alignment (Kaminski et al., 2010). The Atlantic Layer Tracking Experiment (ALTEX) AUV was developed in the USA to conduct observations in the Arctic Ocean. It carried ice-penetrating buoys that allowed data to be transmitted from the vehicle to shore and GPS positional fixes to be obtained along the track of the AUV. To transmit data and obtain GPS positional fixes, the AUV first locates a suitable launch site, which is an ice floe of up to 1 m in thickness. It then releases a buoy; the buoy floats toward the surface until it comes to rest against the bottom surface of the floe. A chemical reaction is initiated inside the nose cone of the buoy, which melts the ice. Once the chemical reaction is complete and a hole is made in the floe, the nose cone is ejected and both the GPS and the ARGOS antennae are deployed (Bellingham et al., 2000).
5 Trends of polar UUVs
5.1 Observations under Antarctic ice shelves
Ice shelves account for almost 11% of the area of the entire Antarctic ice sheet, and cover more than half of Antarctica’s coastline. The interactions between ice shelves and the ocean play important roles in the formation of Antarctic bottom water, the global thermohaline circulation, and sub-ice ecosystems. In Antarctica, AUV-based research is only at the exploratory stage. To date, sub-ice surveys in Antarctica have been limited in range and coverage, and the data needed to build a comprehensive understanding of ice shelves are still missing. In the future, UUVs can be used for seabed mapping and the exploration of sub-ice shelf cavities and the marine environment. These scientific missions would require UUVs with improved sub-ice imaging, collision avoidance, emergency handling, and navigation capabilities.
5.2 Long-range surveys beneath Arctic sea ice
Arctic sea ice is a major indicator of global climate change, and it plays a fundamental role in the climate system. In past decades, different types of robotic systems have been deployed under the Arctic sea ice; however, the scales of these surveys have been insufficient to meet scientific research needs. Therefore, the goal is to develop UUVs that can conduct long-range sub-ice surveys in the Arctic, traverse the Arctic Ocean under the ice, and acquire accurate measurements of multiple parameters of the sea ice and sub-ice waters with unprecedented spatiotemporal resolution that could revolutionize our understanding of climate change. To be able to traverse the Arctic Ocean, UUVs will require reduced power consumption, expanded operational range, and novel navigation and communication systems.
5.3 Application of intelligent technology
In recent years, there have been rapid developments in machine learning, computer vision, human–computer interaction, and other types of intelligent technology. Intelligent technology has been successfully deployed in ground robots, and could be used to improve the performance of polar UUVs. Future research should focus on using intelligent technology to improve the obstacle avoidance, observation, positioning, and other capabilities of polar UUVs.
5.4 Modular structure and low cost
Polar UUVs need to fulfill the requirements of different research projects, and a modular structure with several independent functional parts would allow UUVs to carry different payloads to meet different research needs. Costs will also be reduced. Currently, the price of UUVs and the risk of losing or damaging the vehicle are both high. As a result, the use of UUVs in the polar regions is limited. Therefore, future research and development should focus on developing modular structures and reducing the cost of UUVs.
6 Conclusions
This review revealed the importance of UUVs in answering the major scientific questions regarding the polar regions. Unmanned underwater vehicles have the primary advantage of being able to dive under sea ice and ice shelves to collect data regarding oceanic phenomena that would be almost impossible to access by other means; UUVs help to improve our understanding of the drivers of Arctic and Antarctic change. Primary limitations of existing polar UUVs, such as navigation and autonomous surveying, will gradually be resolved by further developments in artificial intelligence and marine technology. Chinese UUVs have been deployed many times in the Antarctic and the Arctic, and substantial experience in polar operations has been accumulated. It is hoped that Chinese UUVs will soon be able to dive deep beneath Antarctica’s ice shelves and traverse the Arctic Ocean.
Acknowledgments This work is supported by the projects of Chinese National Key R & D Program (Chinese National 863 Program, Grant nos. 2017YFC0821204, 2017YFC0305901), and the Marine Science Research Center of the Chinese Academy of Sciences (Grant no. COMS2019Z02). The authors are grateful for the permission to use images of some of the UUVs used in polar exploration. We would like to thank Dr. Bingrui Li who was a reviewer of this article, one anonymous reviewer, and Associate Editor Dr. Joohan Lee, for their valuable suggestions and comments that improved this article.
Alfred Wegener Institute (AWI). 2020. Autonomous underwater vehicle PAUL. (last updated, 2020-11-20). https://www.awi. de/en/science/biosciences/deep-sea-ecology-and-technology/technology/mobile-pelagic-systems.html.
Andresen C S, Straneo F, Ribergaard M H, et al. 2012. Rapid response of Helheim Glacier in Greenland to climate variability over the past century. Nat Geosci, 5(1): 37-41, doi:10.1038/ngeo1349.
Australian Antarctic Division (AAD). 2019. A week at Davis. (2019-02-15) [2019-03-03].http://www.antarctica.gov.au/living-and-working/stations/davis/this-week-at-davis/2019/this-week-at-davis-15-february-2019.
Australian Antarctic Division (AAD). 2020. Biodiversity hotspots revealed by remote-controlled mini-sub. (2020-02-12) [2020-05-19]. https:// www.antarctica.gov.au/news/2020/biodiversity-hotspots-revealed-by-remote-controlled-sub/.
AUV Peter. 2020. On February 7th at 0624 UTC, we heard the first ping of the AUV after nearly 7 hours of silence. AUV Nupiri muka returned from a 60 km round trip beneath the ice! One of the best moments of my professional life. [2020-02-18]. https: //twitter.com/AuvPeter/ status/1229553209804390400.
Bell R E. 2008. The role of subglacial water in ice-sheet mass balance. Nat Geosci, 1(5): 297-304, doi:10.1038/ngeo186.
Bellingham J, Streitlien K, Overland J, et al. 2000. An Arctic basin observational capability using AUVs. Oceanography, 13(2): 64-70, doi:10.5670/oceanog.2000.36.
British Antarctic Survey (BAS). 2018. Boaty returns from first mission under the ice. (2018-03-13) [2019-03-03]. https://www.bas.ac.uk/ media-post/boaty-returns-from-first-mission-under-the-ice/.
Bowen A D, Yoerger D R, Ferman C C, et al. 2014. Design of Nereid-UI: A remotely operated underwater vehicle for oceanographic access under ice. (2014-9-14) [2015-01-08]. Proceeding of OCEANS 2014, St. John’s, USA: IEEE, http://ieeexplore.ieee.org/abstract/document/7003125/.
Burnett J, Rack F, Zook B, et al. 2015. Development of a borehole deployable remotely operated vehicle for investigation of sub-ice aquatic environments. (2015-10-19) [2016-02-11]. Proceeding of OCEANS 2015, Washington DC, USA: IEEE, http:// ieeexplore.ieee.org/document/7404429/.
Cazenave F, Zook R, Carroll D, et al. 2011. Development of the ROV SCINI and deployment in McMurdo Sound, Antarctica. J Ocean Technol, 6(3): 39-58.
Crees T, Kaminski C, Ferguson J, et al. 2010. Preparing for UNCLOS – an historic AUV deployment in the Canadian High Arctic. MTS/IEEE OCEANS 2010.
Designboom. 2014. Seabed underwater robot develops new 3D data maps of Antarctic ice. (2014-11-25). https://www.designboom.com/technology/seabed-underwater-robot-antarctic-ice-11-25-2014/.
Dowdeswell J A, Evans J, Mugford R, et al. 2008. Autonomous underwater vehicles (AUVs) and investigations of the ice–ocean interface in Antarctic and Arctic waters. J Glaciol, 54(187): 661-672, doi: 10.3189/002214308786570773.
Georgia Institute of Technology (GIT), USA. 2020. Icefin underwater robot (Twitter post). [2020-02-18]. Retrieved from https:// twitter.com/IcefinRobot.
Gulati S, Flesher C, Hogan B. 2009. Navigation, control, and recovery of the ENDURANCE under-ice hovering. [2009-08-25]. http:// www.researchgate.net/publication/228371061_Navigation_control_and_recovery_of_the_ENDURANCE_under-ice_hovering_AUV.
Hickey H. 2019. One year into the mission, autonomous ocean robots set a record in survey of Antarctic ice shelf. (2019-01-23). University of Washington. https://www.washington.edu/news/2019/01/23/one-year-into-their-mission-autonomous-ocean-robots-set-record-in-survey-of-antarctic-ice-shelf/.
iRobot Seaglider. 2019. (2019-09-30) [2020-05-19]. https://en.wikipedia. org/wiki/IRobot_Seaglider.
Jakuba M V, Roman C N, Singh H, et al. 2008. Long-baseline acoustic navigation for under-ice autonomous underwater vehicle operations. J Field Robotics, 25(11-12): 861-879, doi:10.1002/rob.20250.
Jenkins A, Dutrieux P, Jacobs S S, et al. 2010. Observations beneath Pine Island Glacier in West Antarctica and implications for its retreat. Nat Geosci, 3(7): 468-472, doi:10.1038/ngeo890.
Kaminski C, Crees T, Ferguson J, et al. 2010. 12 days under ice – an historic AUV deployment in the Canadian High Arctic. 2010 IEEE/OES Autonomous Underwater Vehicles. September 1–3, 2010, Monterey, CA, USA. IEEE, 1-11, doi:10.1109/AUV.2010.5779651.
Katlein C, Arndt S, Nicolaus M, et al. 2015. Influence of ice thickness and surface properties on light transmission through Arctic sea ice. J Geophys Res: Oceans, 120(9): 5932-5944, doi:10.1002/2015JC 010914.
Katlein C, Schiller M, Belter H J, et al. 2017. A new remotely operated sensor platform for interdisciplinary observations under sea ice. Front Mar Sci, 4: 281, doi:10.3389/fmars.2017.00281.
Kukulya A, Plueddemann A, Austin T, et al. 2010. Under-ice operations with a REMUS-100 AUV in the Arctic. 2010 IEEE/OES Autonomous Underwater Vehicles. September 1–3, 2010, Monterey, CA, USA. IEEE, 1-8, doi:10.1109/AUV.2010.5779661.
Kunz C, Murphy C, Singh H, et al. 2009. Toward extraplanetary under-ice exploration: Robotic steps in the Arctic. J Field Robotics, 26(4): 411-429, doi:10.1002/rob.20288.
Lei R B, Zhang Z H, Li Z J, et al. Review of research on Arctic sea ice physics based on the Chinese National Arctic Research Expedition. Adv Polar Sci, 2017, 28 (2): 100-110, doi:10.13679/j.advps.2017. 2.00100.
Li Z G, Zhang A Q, YU J C. 2004. The application of underwater vehicles in polar expedition. Chin J Polar Res, 16(2): 135-144 (in Chinese with English abstract).
McFarlane J R, MacKay L. 2015. Autonomous underwater vehicle operations in the Arctic. (2015-10-19). OCEANS 2015–MTS/IEEE Washington. October 19–22, 2015. Washington, DC. IEEE, doi:10.23919/oceans.2015.7404510.
McPhail S D, Furlong M E, Pebody M, et al. 2009. Exploring beneath the PIG Ice Shelf with the Autosub3 AUV. (2009-5-11) [2009-10-02]. OCEANS 2009–EUROPE. May 11–14, 2009, Bremen, Germany. IEEE, 1-8, doi:10.1109/OCEANSE.2009.5278170.
Meister M, Dichek D, Spears A, et al. 2018. Icefin: redesign and 2017 Antarctic field deployment. (2018-10-22). OCEANS 2018 MTS/IEEE Charleston. October 22–25, 2018, Charleston, SC, USA. IEEE, 1-5, doi:10.1109/OCEANS.2018.8604725.
National Oceanography Centre (NOC), UK. 2005. The Autosub3 AUV. https://noc.ac.uk/facilities/marine-autonomous-robotic-systems/autosubs.
Nicholls K W, Abrahamsen E P, Buck J J H, et al. 2006. Measurements beneath an Antarctic ice shelf using an autonomous underwater vehicle. Geophys Res Lett, 33(8): L08612, doi:10.1029/2006 GL025998.
Norgren P, Lubbad R, Skjetne R. 2014. Unmanned underwater vehicles in Arctic operations. Conference Paper, Aug 2014, 22nd IAHR International Symposium on Ice. Singapore, August 11–15, 2014. https://www.researchgate.net/figure/UBC-Gavia-AUV-under-ice-with-tether-attached-Courtesy-Donnie-Reid_fig2_330703330.
Pyper W. 2018. Yellow submarine prepares for first Antarctic mission. Australian Antarctic Magazine, Issue 35: December 2018, 12-13.
Richmond K, Febretti R, Gulati S, et al. 2011. Sub-ice Exploration of an Antarctic lake: results from the endurance project. (2011-08-22). UUST’11, http://auvac.org/publications/view/229.
Salavasidis G, Munafo A, Harris C A, et al. 2018. Towards Arctic AUV navigation. (2018-01-01). IFAC-PapersOnLine, 51(29): 287-292.
Shi J X. 2018. A review of ice shelf–ocean interaction in Antarctica. Chin J Polar Res, 30(3): 287-302, doi:10.13679/j.jdyj.20180046 (in Chinese with English abstract).
Singh H, Maksym T, Wilkinson J, et al. 2017. Inexpensive, small AUVs for studying ice-covered polar environments. Sci Robot, 2(7): eaan4809, doi:10.1126/scirobotics.aan4809.
Smith M. 2019. The super-tough drones and robots going where we can’t. (2019-06-14). https://www.bbc.com/news/business-48620704.
Spears A, West M, Meister M, et al. 2016. Under ice in Antarctica: the Icefin unmanned underwater vehicle development and deployment. IEEE Robotics Autom Mag, 23(4): 30-41, doi:10.1109/MRA. 2016.2578858.
Stein R, Fahl K, Gierz P, et al. 2017. Arctic Ocean sea ice cover during the penultimate glacial and the last interglacial. (2017-07-07) [2017-08-29]. Nat Commun, 8: 373, doi:10.1038/s41467-017- 00552-1.
Tao L. 2019. Record of Chinese ninth Arctic scientific expedition (3): Successful deployment of “Haiyi” underwater glider. Encyclopedia (underwater world), 2019(06): 28-29.
The International Thwaites Glacier Collaboration (ITGC). 2019. Antarctica Dispatch 7: Under Thwaites Glacier. [2019-03-06]. https://thwaitesglacier.org/news/antarctica-dispatch-7-under-thwaites-glacier.
Tollefson J. 2020. First look under giant glacier finds troubling currents. (2020-02-27). Nature (news), 578:500.
University of Washington. 2019. One year into the mission, autonomous ocean robots set a record in survey of Antarctic ice shelf. (2019-01-23) [2020-05-19]. https://www.washington.edu/ news/2019/01/23/one-year-into-their-mission-autonomous-ocean-robots-set-record-in-survey-of-antarctic-ice-shelf/.
Wadhams P. 2012. The use of autonomous underwater vehicles to map the variability of under-ice topography. Ocean Dyn, 62(3): 439-447, doi:10.1007/s10236-011-0509-1.
Williams G, Maksym T, Wilkinson J, et al. 2015. Thick and deformed Antarctic sea ice mapped with autonomous underwater vehicles. Nat Geosci, 8(1): 61-67, doi:10.1038/ngeo2299.
Wulff T, Lehmenhecker S, Bauerfeind E, et al. 2013. Biogeochemical research with an autonomous underwater vehicle: payload structure and Arctic operations. (2013-06-10) [2013-09-26]. Proceeding of OCEANS 2013, Bergen, USA: IEEE, http://ieeexplore.ieee.org/document/6608043/.
Wynn R B, Huvenne V A I, le Bas T P, et al. 2014. Autonomous Underwater Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience. Mar Geol, 352: 451-468, doi:10.1016/j.margeo.2014.03.012.
Yeo R. 2007. Surveying the underside of an Arctic ice ridge using a man-portable GAVIA AUV deployed through the ice. OCEANS 2007. September 29–October 4, 2007, Vancouver, BC, Canada. IEEE, 1-8, doi:10.1109/OCEANS.2007.4449402.
Zeng J B, Li S, Li Y P, et al. 2015. The observation of sea-ice in the sixth Chinese National Arctic Expedition using polar-ARVO. CEANS 2015–MTS/IEEE, Washington, October 19–22, 2015. Washington, DC, IEEE, doi:10.23919/oceans.2015.7401819.
Zhang J Y, Shen J, Li H, et al. 2015. Research and application progress on underwater terrain-aided navigation technology. J Natl Univ Def Technol, 37(3): 128-135 (in Chinese with English abstract).
: Zeng J B, Li S, Liu Y. Application of unmanned underwater vehicles in polar research. Adv Polar Sci, 2021, 32(3): 173-184,doi:10.13679/j.advps.2021.0018
10.13679/j.advps.2021.0018
27 April 2021;
17 August 2021;
10 September 2021
Corresponding author, ORCID:0000-0002-3083-6285, E-mail: zengjb@sia.cn
杂志排行
Advances in Polar Science的其它文章
- The marine environmental evolution in the northern Norwegian Sea revealed by foraminifera during the last 60 ka
- An introduction to the riometer system deployed at China-Iceland joint Arctic observatory and its beam- forming correction method based on the preliminary data
- Different physiopsychological changes between AMS- susceptible and AMS-resistant pre-selected Antarctic expeditioners in Tibet
- Characteristics of hydrogen/oxygen isotopes in water masses and implications for spatial distribution of freshwater in the Amundsen Sea, Southern Ocean
- Marine biogenic aerosols and their effects on aerosol- cloud interactions over the Southern Ocean: a review
- Utilization of clean energy and future trend of Antarctic research stations