北斗导航卫星姿态与轨道控制技术发展与贡献
2021-11-10谢军,王平
谢 军, 王 平
中国空间技术研究院, 北京 100094
0 引 言
卫星导航系统是指利用空间按照约定分布的多颗卫星组成的星座,通过在统一时间和位置坐标系中地面站对卫星精确测量,将卫星作为标准时间与位置的导航台站,播发无线电导航信号的系统[1].
导航卫星作为空间飞行器中重要的一类卫星,可提供全球广域高精度的导航定位授时测速等功能,其相关技术的发展成果保障了卫星导航工程建设的顺利完成,推动着卫星导航系统的服务应用越来越广;同时,卫星导航系统根据需求,在不断提高系统服务功能与性能指标的基础上,也对相关技术提出了要求,促进了相关技术的发展与进步[2].
北斗导航卫星的发展历程是从北斗一号静止轨道GEO卫星开始,直至北斗三号全球导航星座覆盖.按照我国北斗系统发展“三步走”战略,在北斗卫星导航系统建设过程中,卫星总体对卫星的姿态与轨道控制系统不断提出更高的要求.
北斗一号卫星从服务功能要求和对卫星平台能力需求分析,其定位导航工作方法决定了对其卫星轨道位置瞬时精度要求不高,仅需两颗地球静止轨道卫星和地面系统即可完成定位导航服务.为此,北斗一号卫星基于东三平台卫星开展设计.
从北斗二号卫星开始直至北斗三号卫星,我国卫星导航系统的导航定位授时服务方式也逐步发展成基于伪随机码测距的无源导航方式.从原理上讲,至少需要4颗导航卫星才能实现导航定位,用户导航定位过程无需地面系统参与,这种导航方式理论上可以服务无限用户数,但对其卫星自身的轨道位置精度和星载时钟精度要求较高.北斗二号卫星任务分析结果要求卫星姿态与轨道控制系统的设计相对于北斗一号卫星需要进行较大调整.特别是北斗三号卫星配置采用了星间链路,通过星间高精度测量与数据传输实现卫星与卫星间位置的精确确定,对于整星平台的姿轨控技术要求进一步提高[3].
上述需求,促进了我国中高轨卫星“偏航控制”、“一体化控制计算机”、“长寿命陀螺”等多项新技术进步与工程应用;国家重大工程自主可控与国产化要求,推动了卫星控制系统“国产三大件”,填补了我国导航卫星姿轨控技术与产品的空白.
本文通过总结北斗一号卫星到北斗三号卫星的发展过程,梳理了北斗导航卫星姿态与轨道控制技术的发展变化,以及在引领卫星姿轨控技术进步和星载器部件自主可控方面取得的成就.同时,根据下一代北斗卫星导航系统的论证需求,分析给出了未来导航卫星姿轨控系统需要关注与研究的关键技术.
1 导航卫星姿轨控制技术的基本要求
按照北斗卫星导航系统的任务要求和系统设计,北斗导航卫星具有以下的基本特点[4]:
1)北斗空间段系统是由MEO、GEO和IGSO三种轨道的几十颗卫星组成混合卫星星座系统;
2)作为空间位置和时间的基准,保证卫星轨道位置的精确测量和保持,且卫星轨道位置能够被高精度地预报;卫星上需要配置高精度的原子钟,实现高精度时频信号的产生、维持和传递;
3)作为对全球用户提供时空基准信息服务的空间基础设施,卫星系统需要能够长寿命、高可靠地连续工作,导航信号具有完好性、可用性和连续性指标;
4)为了使星座系统组网建设快速完成,卫星要求具备组批生产、密集发射的能力,其产品的生产与研制管理模式需要创新,尤其是MEO卫星需要适应一箭多星的发射模式.
导航卫星设计的姿轨控分系统主要任务包括在导航卫星转移轨道段任务和工作轨道段任务.
在导航卫星转移轨道段,当卫星与运载火箭分离后,姿轨控分系统应自主加电并进行速率阻尼,消除由运载火箭产生的分离干扰角速度,并实现对日姿态捕获,保证能源安全;能够自动或根据地面指令建立变轨发动机点火姿态,并根据变轨策略,在规定的时间范围内完成发动机点火;在发动机的点火期间,控制系统能够克服推进剂液体晃动、卫星太阳翼振动以及发动机不平衡导致的干扰力矩的影响,保持卫星姿态稳定.
随着技术的进步,导航卫星的转移轨道段任务中逐渐开始应用各类自主算法,将原来地面支持的飞控操作由星上自主完成,星地数据交互量也大幅度减小,地面飞控工作得到了较大的简化.
在导航卫星工作轨道段,姿轨控分系统主要任务为卫星进入正常模式后,按照系统设计的基于三轴姿态自主确定,采用反作用轮进行三轴姿态闭路控制;为了确保卫星轨道预报精度,卫星正常工作时不能使用推力器进行姿态控制,而采用动量交换和磁力矩卸载的方式进行姿态控制;长期的角动量管理可由磁力矩器完成,整个角动量卸载无需地面参与,星上能够根据卫星残余角动量自主实施.
导航卫星姿轨控分系统要求具备自主完成星上敏感器的干扰自主保护及地影、月影计算与预报的能力,在保护期间姿态控制精度满足正常模式姿态控制精度要求;同时,要求控制系统在卫星长期管理期间具有轨道自主控制能力,依托获得的轨道信息,能够根据轨道控制目标自主制定相位保持策略,并生成相位保持指令序列,具备策略和指令序列下传功能.
针对导航卫星有效载荷配置的大型天线、高精度指向终端等产品,还要求具有对各类导航天线及终端的指向计算、轨迹规划能力,应能克服大型天线转动、卫星太阳翼转动等对卫星姿态的影响,保证卫星的姿态和稳定度满足要求.MEO和IGSO卫星设计为工作在倾角约55°的倾斜轨道上,为了同时保持导航天线对地指向、太阳翼对日指向,卫星姿态需要采用偏航控制.
北斗导航卫星姿轨控分系统的组成与其他类型卫星相同,主要包括敏感器、控制器和执行机构以及相应的软件.
2 北斗一号卫星姿轨控技术
1983年,基于我国当时的航天技术水平和国家工业基础,特别是我国航天无线电测控技术的实践,我国“两弹一星”功勋陈芳允院士根据几何三球交会法原理,大胆地提出了以两颗地球静止轨道GEO卫星为球心,以GEO卫星到用户位置点距离形成的2个球体与地球表面相交得到的两个交点之一,测定地面或空中目标位置,解算得到用户需要获取的完整地理坐标,实现卫星无线电测定业务服务(RDSS)的设想.
1994年1月,国家正式批准了“双星定位系统”的工程立项,北斗一号卫星工程建设正式启动.卫星系统经过多轮的论证工作,最终确定采用东方红三号三轴稳定卫星平台取代曾经提出的东方红二号A双自旋稳定卫星平台的方案.
北斗一号导航卫星采用三轴稳定的东方红三号卫星平台,可使北斗一号卫星的供电能力、配置安装产品等能力大大提高,平台可以为有效载荷转发器提供更多的功率,同时卫星的工作寿命也由双自旋卫星的6年提高到8年,显著增强了北斗一号卫星的使用性能和效益.
当时的东方红三号卫星设计状态是采用双组元统一推进系统进行转移轨道的姿态与轨道控制;卫星正常工作时采用偏置动量控制方案,利用红外地球敏感器测量卫星滚动与俯仰角,依靠卫星俯仰轴上的偏置角动量交换控制卫星的俯仰角;根据惠康原理,利用滚动与偏航角的耦合,通过推力器喷气直接控制卫星的滚动角,同时间接控制偏航角.
在北斗一号卫星转移轨道段,姿轨控分系统通过传统的多次远地点变轨方式,从卫星入轨开始,卫星自动完成对日姿态捕获,保证整星能源供应;其后完成对地捕获,并建立远地点点火姿态,完成490 N推力变轨控制,并最终利用10 N推力器实现定点位置捕获.
在卫星进入同步工作轨道后,北斗一号卫星通过建立-Y轴角动量偏置的方式,利用惠康原理和滚动轴姿控推力器安装设计,实现了滚动轴姿态双脉冲控制策略,保证卫星滚动、偏航姿态精度满足设计要求(俯仰轴由反作用轮直接控制).
在北斗一号卫星研制过程中,为了摆脱关键技术受制于人的局面,卫星总体与姿轨控分系统经过论证,大胆地提出对姿轨控分系统中的太阳翼驱动机构、反作用轮和红外地球敏感器等产品(简称“国产三大件”)开展国产化工作,国产产品与引进产品互为备份,并开展了一系列的技术攻关和试验验证工作,实现了国产化产品的在轨成功应用.“国产三大件”产品的研制成功,为我国后续卫星工程和北斗系统建设国产化工作奠定了基础.
在红外地球敏感器国产化研制过程中,采用芯片设计加固的技术路线,通过工艺设计,制造出了国内首款抗辐射加固ASIC芯片,成功应用在红外地球敏感器产品上,攻克了国产芯片抗辐射加固技术难题.
2000年10月、12月,我国成功发射2颗北斗一号卫星(图1),建成双星定位系统并投入使用;2003年,发射第三颗北斗一号卫星,进一步增强了系统性能,扩大了北斗二号系统的应用领域;2007年,发射第四颗北斗一号卫星.
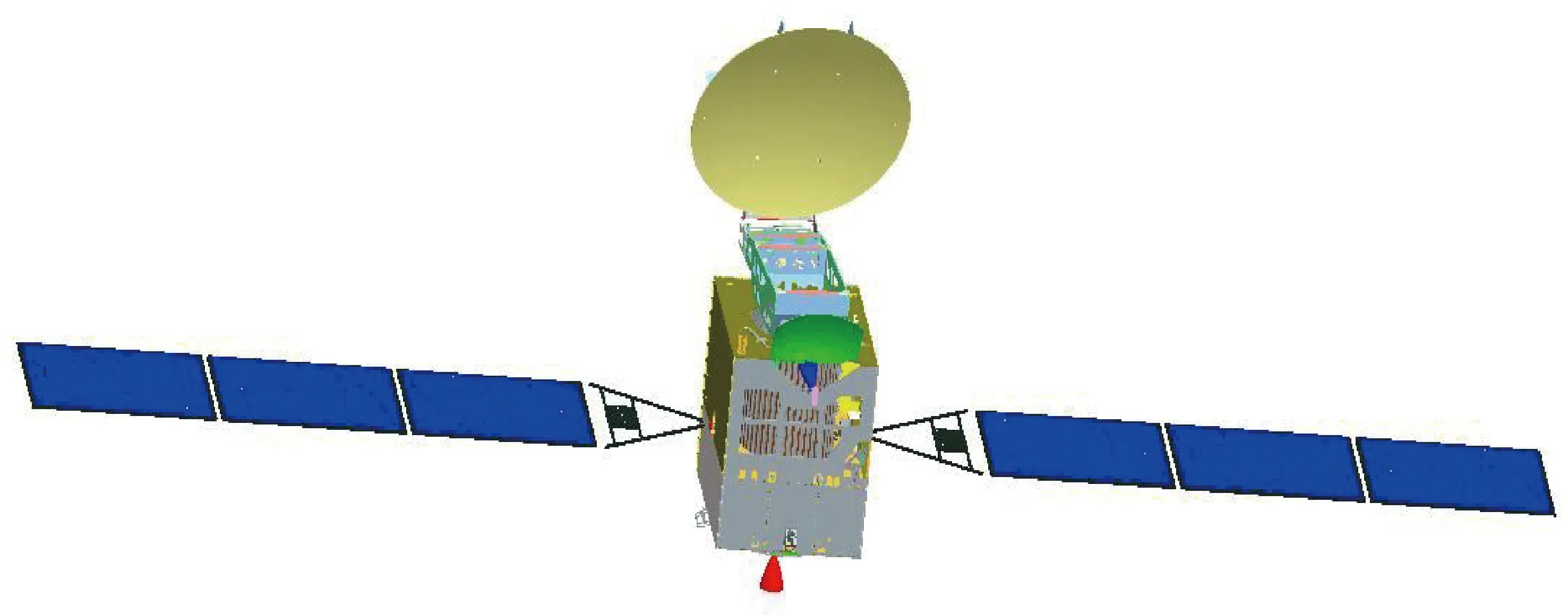
图1 北斗一号卫星在轨展开状态示意图
北斗一号双星定位系统以较小投入、较短时间,打破国外技术垄断,独立自主地开展了卫星导航定位技术试验与应用,建立了国际上首个基于GEO双星定位原理的区域有源卫星定位系统,使我国成为世界上第三个具备空间卫星系统提供PNT(positioning navigation and timing)服务的国家,实现了我国北斗系统建设的第一步.同时,系统还具备短报文与位置报告服务功能,独具特色.
北斗一号系统建设完成,是我国卫星导航事业建设发展的第一个里程碑,系统服务的稳定运行保障了应用的不断推广,为后续建设的北斗二号系统、北斗三号系统积累了经验,奠定了基础.
3 北斗二号卫星姿轨控技术
1997年,我国在同步建设北斗一号系统时,先期开始了北斗二号卫星导航系统的论证工作.大系统围绕有源定位服务、无源导航服务的系统组成、建设步骤、技术途径等进行了探讨和分析,开展了多种方案设计与技术路线研究.
2000年,从首先建立区域系统、逐步过渡到全球系统考虑,根据区域服务的精度要求,提出了系统建设目标、发展阶段、系统体制、星座方案、关键技术及解决途径,北斗二号卫星系统也完成了技术与经济可行性的论证工作.2004年8月,国家正式批准北斗二号工程建设项目立项,全面启动北斗二号系统工程研制工作.
北斗二号卫星系统国家任务要求,空间段星座设计采用“5GEO+3IGSO+4MEO”混合星座的方案.其中GEO卫星方案采用东方红三号卫星改进型平台,其载荷舱高度在东方红三号卫星的基础上增加400mm,GEO卫星具备北斗一号卫星的全部功能,同时增加上行注入与精密测距载荷、无源导航(RNSS)载荷、激光反射器等,可提供有源定位、短报文通信和无源导航定位授时等服务.IGSO卫星采用东方红三号卫星平台并进行适应性修改的方案,配置有数据管理分系统、上行注入与精密测距载荷、无源导航(RNSS)载荷、激光反射器等,可提供无源导航定位授时等服务.MEO卫星方案与IGSO卫星方案基本相同,由长征三号乙运载火箭在西昌卫星发射中心一箭双星发射.
北斗二号导航卫星相对于北斗一号卫星增加了无源导航的服务能力.无源导航服务采用的是四星定位与解算技术,对卫星的平台与有效载荷的要求有了很大的变化.
卫星导航方式的改变促使了北斗二号导航卫星姿轨控系统设计发生了重大改变.北斗二号MEO卫星姿轨控分系统的组成如图2所示.
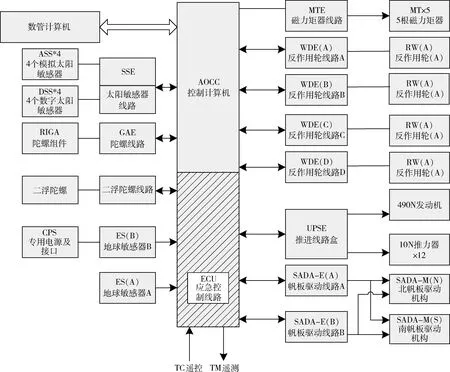
图2 北斗二号MEO卫星姿轨控分系统组成示意图
MEO卫星的敏感器包括地球敏感器(IRES)及相应的接口(CPS)、数字太阳敏感器(DSS)、模拟太阳敏感器(ASS)、3+1S液浮陀螺组件(RIGA)、二浮陀螺及相应的接口线路.
执行机构包括10 N双组元推力器、490 N远地点发动机、反作用轮(RW)、帆板驱动机构(SADA)和磁力矩器(MT).控制器由两套互为冷备份的姿态与轨道控制计算机(AOCC)和一个应急控制线路(ECU)构成.
同时,卫星导航方式的改变也促使了以北斗导航卫星为代表的高中轨卫星的姿轨控系统技术和产品得到了跨越式发展,主要表现在以下几个方面:
1)突破偏航控制技术,填补了我国MEO、IGSO轨道卫星姿态控制技术的空白
由于北斗系统空间段设计的MEO、IGSO卫星工作在倾角约55°的倾斜轨道上,为了同时保持导航天线对地指向与太阳翼对日指向,卫星姿轨控系统需要采取持续的偏航机动和太阳帆板主动控制;同时,角动量的管理必须依靠磁力矩器进行,不能像普通的通信卫星一样,通过推力器完成角动量卸载,如此才能够保证卫星在轨轨道的连续稳定.偏航控制技术需要解决卫星偏航角测量、偏航控制律设计、太阳翼转动控制、星体大角动量交换等一系列难题,是导航卫星特有的关键技术.
2)成功研制长寿命陀螺产品,打破长寿命陀螺依赖进口产品的局面
北斗二号MEO、IGSO卫星的偏航控制,要求对卫星的偏航角和角速度长期测量.在北斗二号卫星之前,我国的星载陀螺产品的平均无故障时间只有20 000小时,在轨可靠工作时间只有几千小时,无法满足长寿命要求.低轨卫星普遍使用俄罗斯的进口陀螺,但进口陀螺体积重量大,无法满足高轨卫星轻量化要求;并且进口陀螺的产品在轨多次发生故障,产品质量不稳定.
北斗二号卫星立足国内技术基础,组织力量,集智攻关,开展长寿命陀螺技术攻关工作,先后研制出二浮陀螺(图3)和光纤陀螺产品,完成地面试验考核,并在北斗二号卫星上得到广泛应用.北斗二号验证的国产长寿命陀螺平均无故障时间超过30万小时,结束了长寿命陀螺依赖进口产品的局面.
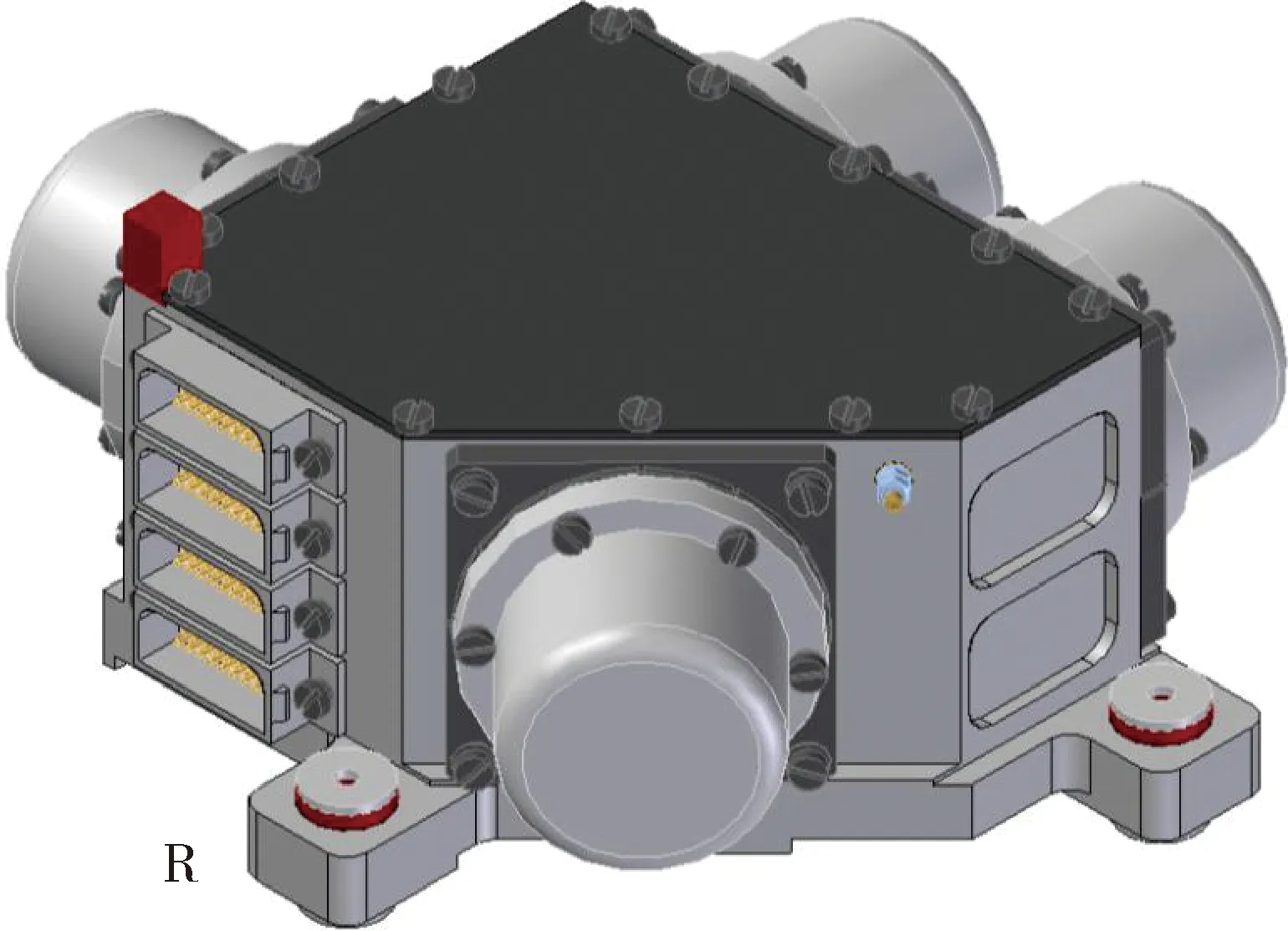
图3 北斗二号卫星3+1S二浮陀螺组件外形结构图
3)成功研制数字化一体控制计算机(AOCC),建立高轨卫星姿轨控控制器新架构
在北斗二号卫星之前,高轨卫星的姿轨控控制器均由在轨计算机(OBC)和姿态轨道控制电路盒(AOCE)两部分组成.其中OBC只负责转移轨道的控制律计算工作,而卫星长期工作时的卫星姿态控制和对外接口电路都是由AOCE完成.AOCE采用分离集成电路和模拟电路实现,产品体积和重量都很大.
北斗二号卫星为了减轻姿轨控分系统重量,将AOCE和OBC合并成一台姿态轨道控制单元(AOCC),采用双机冷备份加应急电路的新架构形式.AOCC全部采用CPU控制,原有的太阳敏感器、陀螺和地球敏感器产品使用的模拟接口电路全部改为数字接口,不仅减小控制器产品的体积和重量,而且极大地提高了控制器的功能和性能,成为后续高轨卫星平台姿轨控控制器的标准架构.
4)中高轨卫星磁力矩卸载技术得到验证
为了满足北斗导航卫星高精度轨道预报要求,要求姿轨控系统不能使用推力器对动量轮进行卸载,只能采用磁力矩器进行角动量卸载.由于地磁场强度与轨道半径的立方成反比,所以相对于低轨卫星而言,20 000 km以上的中高轨道处其地磁场强度相对很弱.在北斗二号卫星之前,国内还没有中高轨卫星使用磁力矩器实现角动量卸载的经历.
为了实现北斗卫星磁力矩器对动量轮卸载控制的任务,卫星总体和姿轨控分系统采用地磁场模型进行分析,制定磁力矩器控制策略,设计研制出200 Am2磁力矩器,成功实现了高轨卫星磁力矩器对动量轮的卸载功能,在轨应用效果良好.该技术状态在后续北斗卫星上延续采用.
除了上述技术创新外,北斗二号卫星还开发研制了MEO卫星数字式红外地球敏感器,填补我国中轨卫星地球敏感器产品的空白;对高轨卫星的动量轮线路盒、太阳敏感器线路盒、推进线路盒、单向阀等产品进行了技术改进,使姿轨控分系统产品的性能大幅度提高.
此外,为了满足组批生产的要求,北斗二号卫星加大了姿轨控分系统产品化力度,建立了各类产品的生产线,强化了产品可靠性设计、工艺设计和产品生产基线管理,极大提高了分系统交付产品的数量和质量.
2007年4月,我国成功发射第一颗北斗二号中圆轨道MEO卫星.作为我国首颗基于RNSS技术体制的导航卫星试验星,验证了系统新体制、新技术,检查和演练了工程研制试验与系统运行管理流程.同时,推进了我国导航卫星信号在国际上的频率协调与在轨试验验证工作的进展.
2010年至2012年,北斗二号系统完成14颗卫星(5颗地球静止轨道GEO卫星、5颗倾斜地球同步轨道IGSO卫星和4颗中圆地球轨道MEO卫星)的研制生产,卫星发射连续成功,快速实现了系统组网和运行服务.
2012年12月27日,我国政府宣布北斗二号系统正式开始为我国及周边地区的用户提供无源定位、导航、授时等各项导航业务服务,实现了我国北斗系统工程建设的第二步,我国导航卫星设计与研制水平大幅提升.
北斗二号系统的稳定运行和连续服务,具备多频信号导航定位授时、位置报告和短报文通信等功能,应用范围越来越广,系统服务已广泛应用于交通运输、海洋渔业、水文监测、气象预报、测绘地理信息、通信时统、电力调度、救灾减灾、应急搜救等领域,渗透到人类社会生产和人们生活的方方面面,为全球经济和社会发展注入了新的活力.
2016年3月之后,工程系统又成功发射了4颗北斗二号备份星(2颗IGSO卫星和2颗GEO卫星),星座系统在轨卫星的冗余备份,有效地保证了北斗二号系统可靠提供连续稳定的服务.
4 北斗三号卫星姿轨控技术
2009年,我国启动北斗卫星导航系统从区域服务范围发展为全球服务范围的系统技术体制、服务功能、导航信号、星座构型、国产化产品等关键技术论证和攻关工作.
北斗三号卫星导航系统设计按照“开放性、兼容性、独立性、渐进性”的原则,继承了北斗二号卫星有源服务和无源服务两种技术体制,空间段星座设计采用“3GEO+3IGSO+24MEO”混合星座的方案.
北斗三号系统通过建立星间链路,突破以星座组网、高精度时空基准建立与维持、星座自主运行为主要特征的关键技术,对播发的导航信号体制进行改进,同时提高星载原子钟性能和测量精度,星上采用星载软件可重构等技术,建成具有自主知识产权、技术先进、稳定可靠的中国卫星导航系统,实现全球服务、性能提高、业务稳定和与其他GNSS系统兼容互操作的工程目标.
同时,北斗三号卫星在研制过程中还开展卫星导航技术相关增量载荷等试验验证工作,为我国下一代卫星导航系统的发展奠定基础.
北斗三号卫星姿轨控分系统在北斗二号导航卫星基础上开展了一系列改进设计,星上部件全面国产化是其重要标志.北斗三号IGSO卫星姿轨控分系统组成如图4所示.
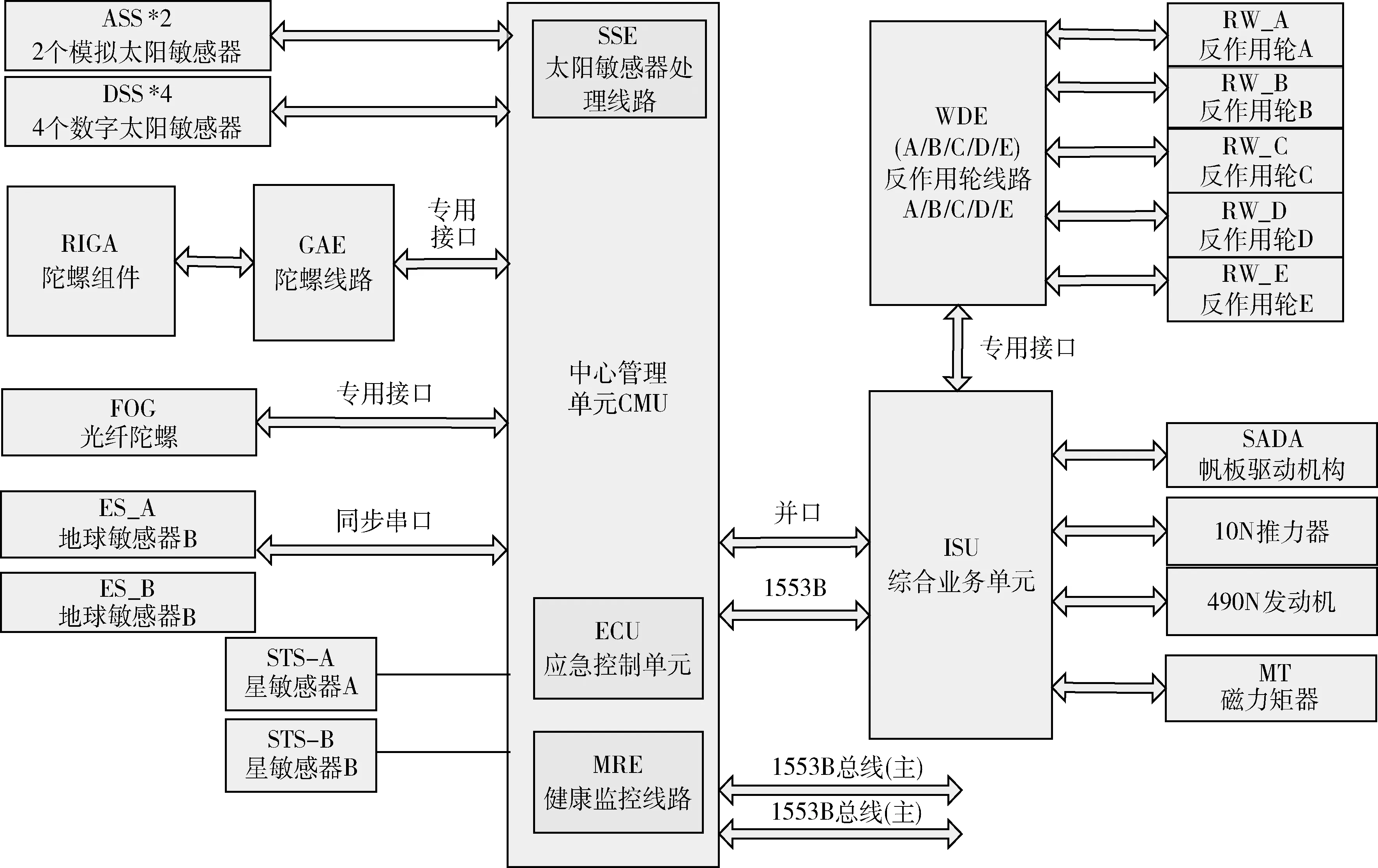
图4 北斗三号IGSO卫星姿轨控分系统组成
从北斗三号卫星开始,姿轨控分系统引入星敏感器定姿,新增了基于星敏感器定姿的模式和方式,卫星姿态的控制精度大幅度提升.通过利用星敏感器和长寿命陀螺,实现卫星三轴姿态全时段可测,从而使得卫星的姿态确定精度和控制精度都有明显提升,卫星在轨运行流程也得到了优化,极大的简化了在轨飞控流程,自主工作水平也得到了明显提升,减小了地面测控的负担.同时,其卫星定姿精度完全满足星上天线、高精度窄波束指向终端等星上载荷高精度指向的要求.
另外,北斗三号卫星采用了综合电子体系,引入综合电子分系统.按照卫星总体设计平台的数据处理都集中在中心管理单元CMU(central management unit,CMU)中完成,并将之前众多的部件线路盒进行了集成,如将执行机构的线路集成至控制综合业务单元ISU中,实现了平台信息集中处理,系统的信号与信息管理与控制得到了进一步优化,压缩了产品数量,减小了产品体积和重量.
2015年至2016年,北斗三号卫星导航系统完成了5颗新平台、新体制、新技术、新产品的试验卫星研制和发射任务,开展了在轨测试、系统集成联调、测试评估考核的工作,验证了运载火箭上面级、“一箭双星”发射、星间链路与自主运行、新型星载原子钟、导航信号播发、国产化产品等关键技术.
2017年11月5日,北斗三号首批组网MEO卫星由长征三号乙运载火箭和远征一号上面级以“一箭双星”方式在西昌卫星发射中心发射升空,卫星成功入轨,标志着我国北斗卫星导航系统建设工程开始由北斗二号系统向北斗三号系统升级,北斗三号卫星组网建设迈出了坚实的第一步.
2020年6月23日,北斗三号系统完成了最后一颗组网卫星的成功发射,30颗北斗三号组网卫星工作稳定,在完成系统集成联调测试,形成了全球范围内导航定位授时和多功能业务的服务能力.
5 下一代北斗卫星姿轨控系统需关注的技术
卫星导航系统作为国家的重大空间基础设施,未来发展将以建设国家时空基准网和导航信息服务网为目标,持续提升服务性能,扩展服务功能,增强连续稳定运行能力,以体系化、网络化、智能化为主要特征,建成“基准统一、基准统一、覆盖无缝、高效便捷、安全可信、智能精准、弹性互备”的国家综合PNT体系,服务我国的航天强国建设.
空间段的导航卫星将作为整个系统中的核心部分,支撑构建“更加泛在,更加融合,更加智能”的天地一体化时空基准网络体系,播发高性能、高可靠的导航定位授时等业务服务信号,实现星座自主连续稳定运行和智能管理,建立基于天基的导航服务系统,提升卫星导航的抗干扰能力.
在未来的北斗导航卫星中,可以设计其云计算平台包含有星载计算模块、大容量存储单元、高速总线网络、星载路由器、时频生成与传递等,可支持星内多任务的迁移和统一调度,提高系统的可靠性和可扩展性,提升导航卫星智能化水平.平台配备的星载公用计算模块和大容量存储模块,具备海量信息的智能存储和处理能力,可实现星座级的星座拓扑、网络路由、时间信息、自主健康等各种智能管理,并可为用户提供天基导航信息云存储和云计算服务.同时,形成的云计算平台可作为泛在的空间网络共享资源池,实现空间网络计算、存储、应用等资源的共享和按需配置.
为此,下一代北斗导航卫星中的姿态与轨道控制技术发展应与卫星平台的发展紧密结合,分析总结目前北斗导航卫星的设计和在轨运行情况,针对卫星转移轨道段的自主测定轨道、推力标定、变轨策略生成和卫星姿态异常的自主处置及自主恢复等技术开展研究,通过卫星的自主管理,降低对地面运维系统的依赖;针对卫星配置的大口径天线等产品存在运动的情况,研究减轻各种工况下产品转动对卫星姿态的扰动,消除对星间高精度测量和数据传输的影响,保证导航信号服务的连续性、完好性和精度;针对GEO、IGSO卫星,研究减少轨道机动带来用户服务计划中断时间的措施.
同时,根据下一代北斗导航卫星任务要求和卫星总体论证与设计,以卫星服务功能与指标需求为牵引,关注并研究卫星姿态与轨道自主控制技术、新型测量敏感器技术、先进化学推进技术和高性能可信电推进技术等,其产品将向着高智能、小型化方向发展,支撑下一代北斗系统的建设.
6 结束语
本文通过总结北斗一号卫星到北斗三号卫星的发展过程,梳理了北斗导航卫星姿态与轨道控制技术的发展变化,以及在引领卫星姿轨控技术进步和星载器部件自主可控方面取得的成就.同时,根据下一代北斗卫星导航系统的论证需求,分析给出了未来导航卫星姿轨控系统需要关注与研究的关键技术.