F.US-UFO型果园避障割草机试验研究*
2021-11-09沈启扬雷哓晖马拯胞李健
沈启扬,雷哓晖,马拯胞,李健
(1. 江苏省农机具开发应用中心,南京市,210017; 2. 江苏省农业科学院,南京市,210014)
0 引言
果园割草是果园管理的一项重要作业环节[1],一年需要刈割3~5次[2],用工量多,劳动强度大。常见割草机有乘坐圆盘式、拖拉机旋耕式和人工背负式,但主要用于牧草收割和草坪管理。果园中的果树均按照一定的行间距和株间距进行栽植。果树的行间距和株间距较大,使得果树行间和株间的土地上生长较多的草,而果园生草会吸收果园土壤中的营养成分,影响果树的生长和果树的产量,因此果树收获前需要多次对果园中的草进行清除。除草有行间除草和株间除草之分,行间除草易于实现,株间除草较为困难,问题集中在树干的避障方法上。
国内果园机械化割草起步晚,学术研究多集中在株间仿形割草上。徐丽明的篱架式葡萄株间自动避障除草机[3-5],株间除草作业覆盖率在田间试验中高达97.5%。李善军的柑橘园仿形割草机切割器[6],通过与正交试验最优值对比,切割器峰值扭矩可降低0.38%,一次切割整齐率上升5.43%。杨欣的果园垄面割草机[7],割草机刀盘可随垄面地形进行仿形割草,经田间试验:割茬高度为64.4 mm,割草机漏割率为5.6%,割茬高度标准差为5.15,变异系数为8.3%,稳定系数为92.7%。除了机械化割草,还有防草布铺设[8]、火焰灭草[9]和田间生草[10]等除草方法的研究。国外果园割草机市场化产品较多,但未在文献中见到机具性能试验的相关报道。如意大利生产的多工序葡萄株间耕作机,集割草、松土、清扫功能于一体;美国Spraydome系列树下除草机,封闭罩盖式除草剂喷施作业;荷兰DR系列变割幅割草机,行宽变距式作业。目前国外对于果园除草技术的研究主要集中在方法创新上,如Martinelli对比研究行间生草技术和除草剂对柑橘种植的影响[11],Granatstein对比研究旋耕除草、除草剂除草和火焰除草在有机苹果园和梨园中的作业效果[12]。其研究可为本文机具的田间试验方法提供参考。
借鉴上述国内外机型的设计经验,前期研发了一款F.US-UFO型果园联合割草机[13],用于果园行间树下的自动化联合割草作业,但尚未开展系统性的田间试验来评价割草机的田间作业性能。因此,本文对F.US-UFO型果园联合割草机在江苏省泰兴市烨佳梨园、沛县聚英阁水果种植家庭农场和睢宁县楸树研发基地3所示范区进行了作业性能试验和田间生产试验,以考查其在江苏果园的可靠性、适用性与经济性。
1 整机结构与工作原理
割草机整机采用拖拉机3点悬挂方式作业,由机架、液压系统、机械传动系统、行间碎草机构、株间割草机构、镇压装置组成。割草机结构设计应满足果园割草农艺技术要求,该机具通过行间和株间联合割草实现果园割草环节的机械化作业。整机结构如图1所示,主要技术参数如表1所示。

图1 整机结构Fig. 1 Whole structure1.探测杆 2.液压马达 3.减振器 4.液压换向阀 5.液压油箱6.液路分配阀 7.齿轮泵 8.锥齿轮箱 9.悬挂架10.带轮传动轴保护罩 11.传动皮带罩壳 12.机架 13.镇压轮14.避障液压缸 15.避障圆盘支架 16.避障圆盘
割草机为单边避障型,拖拉机需配带液压输出系统,通过侧移液压缸控制其侧移位置。割草机工作时,拖拉机PTO通过万向传动轴带动动力输入轴旋转,拖拉机输出动力经锥齿轮箱传送给带轮传动轴和齿轮泵。带轮传动轴转速经带轮传动机构变速后,带动行间割草刀辊旋转。齿轮泵将液压油以一定的压力,经高压油管和液路分配阀,输送给液压马达和液压换向阀。液压马达带动避障刀盘旋转作业,液压换向阀通过控制避障液压缸的伸缩,使得避障圆盘绕树摆动,以实现避障功能。当位于避障圆盘外缘轮廓的探测杆碰触到树干时,探测杆压块对液压换向阀的顶针施压,液压换向阀控制避障液压缸收缩,避障圆盘向后摆动;当探测杆未探测到树干时,液压换向阀顶针复位,避障液压缸伸长,避障圆盘向前摆动。避障圆盘四周固定安装有橡胶圈,可防止圆盘外缘钢结构与树干发生碰擦。避障圆盘与转动支架之间由平行四边形仿形机构连接,在减振器弹力、避障圆盘重力和仿形滑盘的共同作用下,避障圆盘纵向位置能够根据树干四周地势进行适当的自由调整,实现仿形割草。行间割草机构后方安装有镇压轮,用于对作业后的行间路面进行压实。

表1 主要结构与性能参数Tab. 1 Main structure and performance parameters
2 材料与方法
2.1 试验条件
试验地选用江苏省泰兴市烨佳梨园(泰兴烨佳梨园)、沛县聚英阁水果种植家庭农场(沛县聚英阁苹果园)、睢宁县楸树研发基地官山示范区(睢宁官山楸树园)。各园区试验面积、温度、相对湿度、土壤紧实度、种植行间距及行道坡度等试验条件如表2所示。

表2 试验条件Tab. 2 Test condition
2.2 试验方法
2020年7月至8月依照《GB/T 10938—2008旋转割草机》[14]、《GB/T 5667—2008农业机械生产试验方法》[15]、《JB 8520—1997旋转式割草机安全要求》[16]在3所示范区对割草机进行了作业性能试验和田间生产试验。作业性能试验包括应收草质量、割幅(行间割幅、避障割幅)、割茬高度(行间割茬高度、避障割茬高度)、漏割率(行间漏割、避障漏割)、避障损伤率、避障割草高度与行间高度最大差和最短避障距离的测定。田间生产试验包括使用可靠性系数、平均故障间隔时间、班次小时生产率、劳动生产率和单位面积耗油量的测定。
2.2.1 性能试验方法
1) 应收草质量测定。在选定的试验田内,用取样框(边长为30 cm的正方形框)分别取5个样点,按照15 cm的留茬高度将草全部割下,称其重量,求平均后按照式(1)换算成单位面积平均收获草的质量。该质量即为单位面积应收草质量。
(1)
式中:Gy30——取样框实收生草质量,g;
Gy——单位面积应收生草质量,g/m2。
2) 割幅的测定。行间割幅是指组合机具中用于果园行间除草的甩刀式灭茬机作业的割幅,避障割幅是指组合机具中果园株间割草圆盘所对应的割幅。鉴于行间树下联合避障割草机作业的特殊性,将割草机的割幅按照行间割幅和避障割幅分别进行测量。每一行程在测区内等距测定2点,重复3次试验。计算其平均值,即为实际平均割幅。
3) 割茬高度的测定。由于行间作业以除草为主,杂草留茬高度较低,树下避障作业以割草为主,杂草留茬高度较高,割草机在果园行间和树下的已作业区域会有明显的割茬高度差,以此作为行间和树下割草区域判别标准,在3个园区沿割幅方向在全割幅内测量行间割茬高度和避障割茬高度。用1 m的钢直尺放在地面上,等间隔测量20根后求平均值,每一行程等间隔测2点,作业行程重复3次。
4) 漏割率的测定。割草机在田间作业过程中,由于拖拉机行驶过快或者刀盘转速过慢,会产生漏割现象,这会严重影响作业效果。而且,割草机行间和树下刀盘的作业方式不同,行间属于滚筒式打草,树下属于水平旋转式切草,行间及树下的漏割率也会不同。为此试验中进行了行间及避障漏割率的测定,同样使用30 cm×30 cm的取样框在行间及树下进行单位面积漏割损失量的测定,总体数据求平均后进行漏割率的计算。在测区内,全割幅范围内测定未割生草去掉割茬后的质量即单位面积漏割损失量。每点沿机组前进方向测0.5 m长(割幅小于2.5 m的测1 m长),每一行程等间隔测2点,试验重复3次,漏割率按照式(2)计算。
(2)
式中:Sl——漏割率,%;
Gl——单位面积漏割损失量,g/m2;
Gy——单位面积应收生草质量,g/m2。
5) 避障损伤率的测定。在割草机株距避障作业过程中,避障圆盘会与树干发生碰擦,从而会出现撞(划)伤、脱皮、折断等受伤现象。受伤果树数量除以总测量数量的比值即为避障损伤率。每50 m测量1次,共3次,按式(3)计算避障损伤率。试验中测量割草机避让50棵果树所发生的树干损伤数量,试验重复3次后取平均值。
(3)
式中:Ss——避障损伤率,%;
n——损伤树干的数量;
N——被测树干的数量。
6) 避障割草高度与行间高度差。避障刀盘割茬高度与行间刀盘割茬高度差,每一行程等间隔测2点,试验重复3次,按式(4)计算避障割草高度与行间高度差。
Z=H-B
(4)
式中:Z——避障割草高度与行间高度差,cm;
H——行间刀盘平均割茬高度,cm;
B——避障刀盘平均割茬高度,cm。
7) 最短避障距离的测定。避障刀盘依靠液压缸围绕树干工作,在果树行间与株间来回摆动,对果树株距有一定的要求,试验中为了精确的测量割草机避障圆盘的最短避障距离,在一段平坦的空地上,用3根等间距排列的竹竿进行避障试验,竹竿间距以0.1 m的间隔从3 m逐渐递减排列,每次距离变动后试验3次。
2.2.2 生产试验方法
每个果园测试3天,1天1班次。对割草机在3个试验果园的使用可靠性系数、平均故障间隔时间、工作效率、单位面积耗油量4项指标进行了系统规范的测试,试验使用37.3 kW大鹏王拖拉机,每个果园试验面积皆不小于3 hm2。
使用可靠性系数:在生产考核期间,机具有效作业时间总和占考核时间的百分比,按式(5)计算。
(5)
式中:K——使用可靠性系数,%;
Tz——机具班次作业时间,h;
Tg——机具班次故障时间,h。
平均故障间隔时间:在生产考核期间,机具有效作业时间总和比上机具累计故障次数,按式(6)计算。
(6)
式中:MTBF——平均故障间隔时间,h;
r——机具累计故障(轻度故障除外)次数。
工作效率:在生产考核期间,机具作业面积比上作业时间,按式(7)计算。
(7)
式中:Wb——工作效率,hm2/h;
U——作业面积,hm2;
Tb——作业时间,h。
单位面积耗油量:在生产考核期间,机具作业总耗油量比上作业面积,按式(8)计算。
(8)
式中:Q——单位面积耗油量,kg/hm2;
Qr——总耗油量,kg。
3 试验结果与分析
3.1 割草机性能试验
3.1.1 应收草质量测定结果分析
采样点数据如表3所示。表3中3个园区单位面积应收生草质量相差较大,按照从大到小的排序为泰兴烨佳梨园、睢宁官山楸树园、沛县聚英阁苹果园。因沛县聚英阁苹果园杂草以狗尾草为主,相对于其它草种单位面积质量最轻,故其单位面积应收生草质量只有258.9 g/m2,而泰兴烨佳梨园主要为早熟禾和水花生,相对于其它草种单位面积质量最重,其单位面积应收生草质量为1 867.8 g/m2。而且从表3中可以看出沛县聚英阁苹果园样本点间杂草质量波动较小,即杂草生长分布较其它2个果园均匀。

表3 单位面积应收草质量的数据Tab. 3 Data of grass mass per unit area
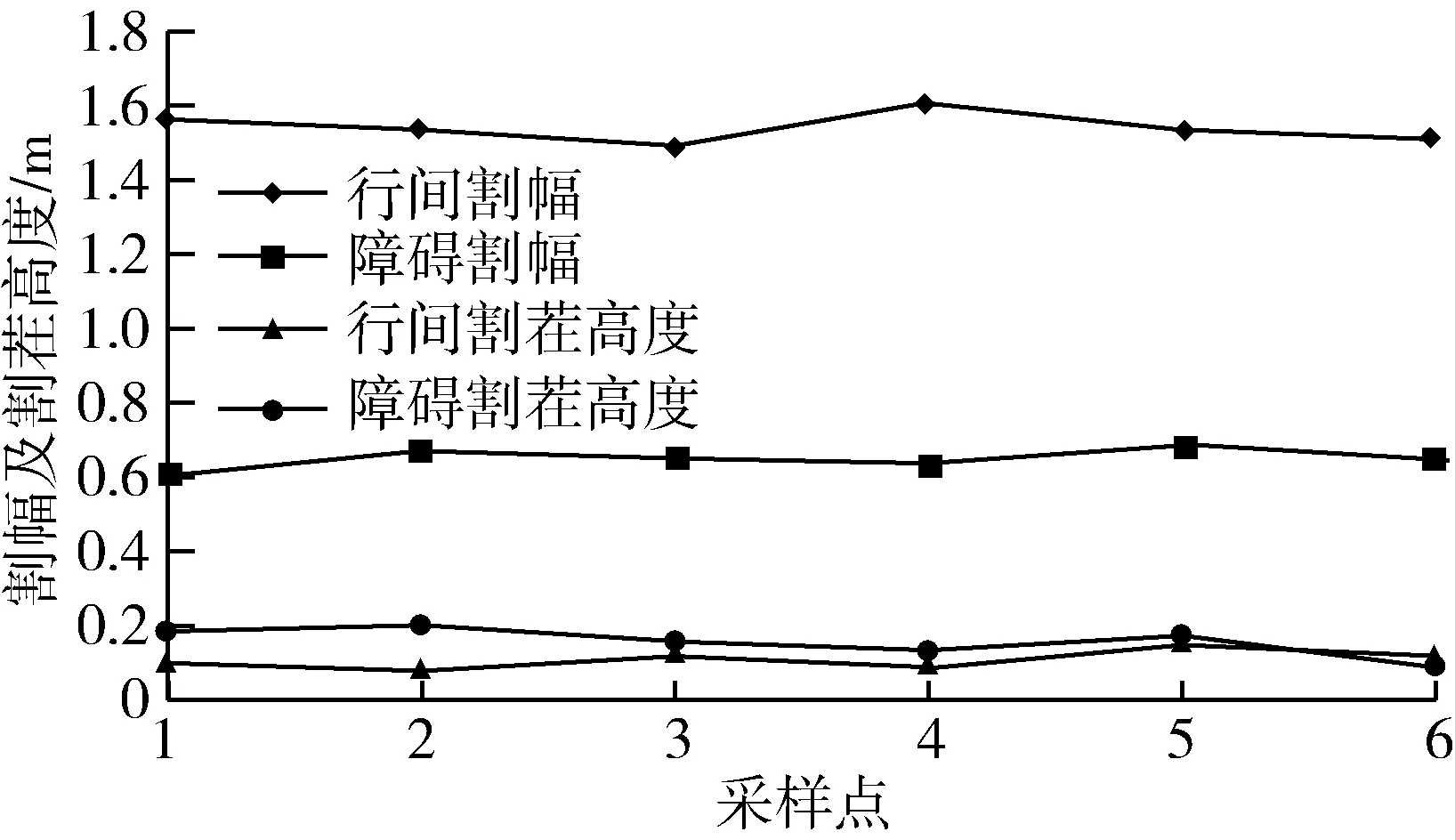
3.1.2 割幅、割茬高度测定结果分析
各园区6个采样点割幅、割茬高度的试验数据如图2所示。为了能够反映单个园区间割幅、割茬高度的稳定性,按照式(9)、式(10)、式(11)对各样本点割幅、割茬高度的变异系数进行计算,结果如表4所示。割草机行间割幅、避障割幅、行间割茬高度、避障割茬高度分别为1.54 m、0.61 m、0.11 m和0.15 m。睢宁官山楸树园4个指标的变异系数均比其他果园小,这与其平坦的地势有关,园区地势越平坦,行间坡度越小,割草机割幅、割茬高度的变异性越小。泰兴烨佳梨园坡度角虽然较沛县聚英阁苹果园大,但割茬高度变异系数较沛县聚英阁苹果园小,这是因为沛县聚英阁苹果园单位面积应收草质量远小于泰兴烨佳梨园,行间杂草的相对稀少影响割茬高度的采样。由此可知,割草机尽量选择在行间坡度小,路面地势较为平坦的果园作业。
(9)
式中:ai——各样本点割幅、割茬高度,m。
(10)
式中:sa——各样本点割幅、割茬高度标准差,%。
(11)
式中: CV——各样本点割幅、割茬高度变异系数,%。
(a) 泰兴烨佳梨园

(b) 沛县聚英阁苹果园

(c) 睢宁官山楸树园图2 割幅和割茬高度试验结果Fig. 2 Test results of cutting width andstubble height

表4 割幅、割茬高度的变异系数结果Tab. 4 Coefficient variation of cutting width and stubble height
3.1.3 漏割率测定结果分析
漏割损失量测定结果如图3所示,经计算泰兴烨佳梨园、沛县聚英阁苹果园和睢宁官山楸树园的漏割率分别为3.8%、4.2%和1.6%。
教师在小学阶段的数学学科课程中,合理地使用数字化的教学资源,能够有效地扩充数学课堂的容量性。数字化的这些资源能够在一定程度上,刺激学生各种感官,促使学生主动吸收知识,缩短了对知识的接受时间。由于传统的课堂教学方式严重束缚了课堂的容量,因此,教师应利用数字化的教学资源打破这一局面,加快教学的进程,减少大量的课堂时间浪费在课堂的板书上,从而优化课堂的结构[2]。

(a) 泰兴烨佳梨园

(b) 沛县聚英阁苹果园
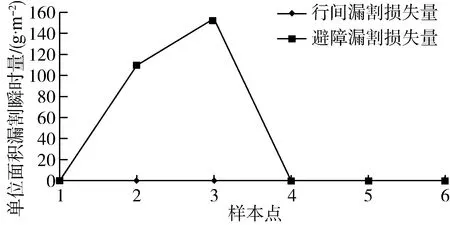
(c) 睢宁官山楸树园图3 漏割损失量试验结果Fig. 3 Test results of miss cutting weight
睢宁官山楸树园漏割率最小,沛县聚英阁苹果园的数据波动的振幅较其它果园小,这与果园行间地势及杂草生长量的分布有关。睢宁官山楸树园路面平整,行间及避障漏割损失量零值较多(无漏割),割草机漏割量少。沛县聚英阁苹果园虽然杂草分布均匀,样本点漏割损失量间的差距小,但是漏割率最大,这是因为样本点杂草生长旺盛,园区整体漏割损失量大。泰兴烨佳梨园和睢宁官山楸树园虽然漏割率较沛县聚英阁苹果园小,但其有草样本点的漏割损失量较沛县聚英阁苹果园大,这是由于泰兴烨佳梨园和睢宁官山楸树园整体漏割率被无漏割样本点均分,使得整体漏割率降低。图4为割草机作业前后对比。

(b) 作业后图4 割草机作业前后对比Fig. 4 Before and after lawn mower operation
3.1.4 避障损伤率测定结果分析
避障损伤率测定现场如图5所示,受伤根数除以总测量根数的比值即为避障损伤率,试验结果如表5所示。

图5 损伤主干Fig. 5 Damaged trunk
从表5可以看出,3个果园的避障损伤率皆在6%以下,割草机避障效果较好。避障损伤率为睢宁官山楸树园2.6%、泰兴烨佳梨园4.6%、沛县聚英阁苹果园5.4%。睢宁官山楸树园行间地势平坦,且楸树株距较其他果园大,故其割草机作业的避障损失率最小。泰兴烨佳梨园和沛县聚英阁苹果园都有坡度,二者避障损失率较大,又因为沛县聚英阁苹果园的株距相对最小,割草机树下避障作业较其它果园困难,故其避障损失率在3个果园中最大。由此可知,果园行间地势越平坦,果树株距越大,行间坡度越小,割草机避障损伤率越低。

表5 损伤率结果Tab. 5 Damage rate
3.1.5 最短避障距离测定结果分析
在园区机耕道路上用3根等间距排列的竹竿进行避障试验,竹竿间距以0.1 m的间隔从3 m逐渐递减排列,图6为割草机避最短避障距离测试现场。

图6 避障距离测试现场Fig. 6 Measurement site of obstacle avoidance distance
3.2 田间生产试验
2020年8月份,对各园区进行田间生产试验,表6为各果园班次作业时间利用情况查定表,油耗测定现场如图7所示。经计算,表6中割草机使用可靠性系数k为泰兴烨佳梨园99.6%、沛县聚英阁苹果园99.64%、睢宁官山楸树园100%,割草机平均故障间隔时间MTBF为泰兴烨佳梨园10.96 h、沛县聚英阁苹果园9.3 h,割草机工作效率Wb为泰兴烨佳梨园0.43 hm2/h、沛县聚英阁苹果园0.46 hm2/h、睢宁官山楸树园0.59 hm2/h,割草机单位面积耗油量Q为泰兴烨佳梨园14.69 kg/hm2、沛县聚英阁苹果园9.18 kg/hm2、睢宁官山楸树园10.36 kg/hm2。

表6 各果园班次作业时间利用情况查定表Tab. 6 Investigation table of mower working
割草机使用可靠性系数计算数据表明,F.US-UFO割草机能够很好地在3个试验园区进行生产作业。3个试验园区割草机平均故障间隔时间均大于8 h,证明其能够顺利的完成1天的工作,不会因为机具的故障问题耽误白天的割草工作。同时田间生产试验也测试出了割草机在3个试验园区的平均工作效率为0.49 hm2/h、单位面积耗油量为11.41 kg/hm2,这可为果园管理者对机具盈利面积[15]的计算提供参考,以保证其生产利润。

图7 油耗测定现场Fig. 7 Fuel consumption measurement
4 结论
本文对F.US-UFO型果园避障割草机进行田间试验,该机具能够实现行间割草、株间割草、树下割草、抛草、等功能,机具行进过程中能自动避让树干、水泥(钢筋)立柱等障碍物,适合在梨园、苹果园和楸树园等林果园区割草作业。
1) 割草机行间割幅为1.54 m,避障割幅为0.61 m,行间割茬高度为0.11 m,株间割茬高度为0.15 m;3家果园平均割草机漏割率为3.2%,平均避障损伤率为4.2%,平均故障间隔时间为10.13 h,能够较好地完成行间和株间割草作业。
2) 果园行间坡度越小,园间路面越平坦,果树株行距越大,割草机作业质量越高。结果显示楸树机械化避障割草效果最好,梨树和苹果树次之。
3) 割草机工作效率为0.49 hm2/h,单位面积耗油量为11.41 kg/hm2,这可为果园管理者对机具盈利面积的计算提供参考,以保证其生产利润。
4) 在割草机作业过程中发现,个别果树第一主枝离地面距离过矮造成不同程度的擦碰伤,而割草机液压油箱的设计置于前进方向的右侧,油箱顶面离地距离0.9 m。经测量受伤的第一主枝距地最短距离0.42 m,离树干中心最短距离0.38 m,建议割草机液压油箱设计选择前进方向左侧。
