涡旋电磁波雷达锥体目标旋转多普勒探测
2021-11-07王建秋王宏强程永强
王 煜 刘 康 王建秋 王宏强 程永强
(国防科技大学电子科学学院 长沙 410073)
1 引言
携带有轨道角动量的涡旋电磁波[1,2],其环状的辐射场强度分布和螺旋形的相位波前使其具有方位向上的相位信息调制能力[3],近些年以来在涡旋电磁波雷达成像[4]、旋转目标检测[5,6]等领域获得了越来越多的关注。不同于传统平面电磁波照射,利用涡旋电磁波对目标进行探测时,不仅会在径向上产生线性多普勒频移,还会在方位向上产生多普勒频移,即旋转多普勒频移[7-10]。通过对线性多普勒和旋转多普勒二维信息的联合处理,可以获得比传统平面波探测更加丰富的信息量,从而更加准确地估计目标运动参数,为目标精确识别提供有效支撑[11-13]。
弹道中段目标微动特征的提取与识别是雷达目标识别领域的热点问题。弹道导弹的弹头大都是锥体,弹道导弹在中段飞行时,为了保持姿态稳定需要绕自身对称轴做自旋运动,同时还会围绕空间中某一定向轴做锥旋运动,两者共同构成进动[14]。进动属于目标精细运动特征,可以反映出目标的质量分布特性及尺寸特性,弹头的进动特征使得其与假目标存在较大区别,基于进动特征的参数估计对真假弹头识别有重要的意义[15,16]。目前应用于弹道导弹目标识别的方法主要包括RCS特征识别[17,18]、一维距离像特征识别[19,20]、逆合成孔径雷达像识别[21]和微动特征识别[22-24]。其中微动特征识别在20世纪七八十年代开始受到研究人员的重视,受目标微动调制的微多普勒被认为是一种能够反映目标物理本质的识别信息,得到了越来越多的研究。传统平面波雷达照射目标只能引起径向线性多普勒频移,对于自旋对称的锥体目标来说,其底部散射中心瞬时微多普勒频率分量变化比较复杂,不能视之为正弦变化,且即使对正弦变化的顶部散射中心频率分量,其幅度也是多个参数耦合在一起的[25,26]。基于平面波雷达径向线性多普勒效应的参数估计方法一般只能直接估计出锥旋频率,而对于其他参数的估计还需要进行更加复杂的处理,因此现有基于微多普勒调制的估计方法还需要更进一步的研究。
在现有的旋转多普勒目标探测研究中,主要针对平面物体如旋转圆盘[6,27]等,鲜有对非平面物体的研究。锥体进动特征会对雷达回波产生微多普勒调制,旋转多普勒是涡旋电磁波回波受目标横向微动调制产生的微多普勒特征,可以提供目标横向上的微动信息,为目标参数精确估计提供依据,故对锥体的旋转多普勒效应研究具有重要的现实意义。对于沿着雷达径向飞行的目标而言,目标在径向上无微动分量,只在横向上有微动分量。而涡旋电磁波由于具有独特的螺旋形相位波前,横向上的旋转多普勒频移使其可以获得垂直于径向的目标运动信息,故利用旋转多普勒效应可以有效提取出目标横向微动分量,能有效提升雷达在特定运动场景下的目标识别能力。
本文的工作安排如下:第2节分析了锥体目标回波旋转多普勒效应,推导了锥体目标回波信号并且建立了锥体目标回波多普勒模型;第3节提出一种基于涡旋电磁波旋转多普勒效应的锥体目标参数估计方法,并通过仿真实验验证了方法的有效性;最后,第4节对本文进行了总结。
2 锥体目标旋转多普勒效应
假设弹头是光滑锥体,弹头绕对称轴(本地坐标系的z轴)做自旋运动,绕锥旋轴OC做锥旋运动,考虑到光滑锥体的旋转对称性,其自旋运动对雷达回波不会造成影响,因此本节只考虑锥体的锥旋运动形式。
涡旋电磁波雷达锥体目标探测示意图如图1所示,O-XY Z是雷达坐标系。锥体目标高为H,质心位于O′,质心到锥底的距离为h,进动锥体绕其对称轴O′z′自旋的同时绕锥旋轴O′z进动,锥旋角速度为Ωc,进动角为θc。目标的进动可以理解为O′z′绕锥旋轴O′z转动,其中锥顶散射点P1绕锥旋轴以角速度ωc旋转,锥底散射点的运动则是自旋和锥旋的叠加。假设雷达视线(Line of Sight,LOS)与锥旋轴方向一致,则此时锥体目标的进动可以看作锥顶和锥底散射点分别绕锥旋轴的旋转,角速度为ωc。假设锥体质心在雷达坐标系中的坐标为,其极坐标为(R0,θr,φr)T,其中,θr=arccos(zO′/R0),φr=arctan(yO′/xO′),故雷达视线方向的单位矢量可以表示为nLOS=(nx,ny,nz)T=(sinθrcosφr,sinθrsinφr,cosθr)T,锥旋向量可以表示为ωc=(ωx,ωy,ωz)T=Ωc·nLOS=Ωc(nx,ny,nz)T。假设P1绕轴旋转的中心为O1,旋转半径为r1=(H -h)sinθc,P2绕轴旋转的中心为O2,旋转半径为r2=hsinθc+racosθc,由于O1和O2都位于锥旋轴上,故极坐标可以分别设为O1(R1,θr,φr)T和O2(R2,θr,φr)T,其中R1=R0-(H -h)cosθc,R2=R0+hcosθc-rasinθc。
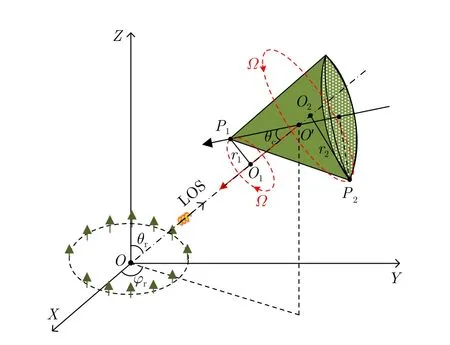
图1 涡旋电磁波雷达锥体目标探测示意图Fig.1 Diagram of the vortex electromagnetic radar cone-shaped target detection
基于均匀圆形阵列天线(Uniform Circular Array,UCA)产生携带不同OAM模态的涡旋电磁波,单个阵元发射载频为fc的单频信号,UCA在Pi(ri,θi,φi)处合成的信号为Es(t)=ej2πfctNjlejlφ(t)·Jl(kasinθ),其中,l是OAM模态数,Jl(kasinθ)是l阶第1类贝塞尔函数。当单个接收阵元位于雷达坐标系原点位置处,雷达处在单发-单收工作模式时,与目标相互作用后的回波信号数学模型可以表示为
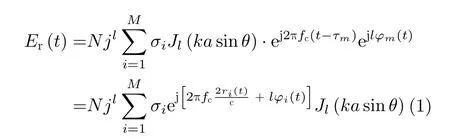
其中,ri(t)和φi(t)分别为
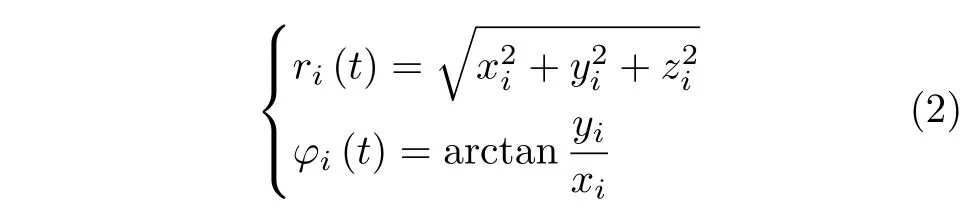
Φi(t)=2πfc·2ri(t)/c+lφi(t)是回波中的相位项,对其关于时间求导可得回波多普勒频移。lφi(t)是与空间方位项相关的项,对其求导可以反映方位角的变化率,即角速度的变化情况。可以发现,不同于传统平面电磁波等相位波前照射下,涡旋电磁波相位绕波束轴周期分布使得回波中蕴含了目标横向运动对相位的调制信息,这也给基于涡旋电磁波的目标微动探测带来了一个径向之外的另一个信息获取维度。在前视条件下,锥体进动轴与LOS方向一致,散射点的径向投影距离是不随时间变化的常数,目标微动在径向上没有投影分量,所以回波中线性多普勒为0,回波中仅有旋转多普勒频移fRD。

φi(t)就是散射点方位角随时间的变化,对其求导就能得到方位角变化率。由于φi(t)只与雷达坐标系中的x坐标和y坐标有关,故只需要考虑目标运动在XOY平面上的投影。
对于做锥旋运动的锥体目标上某一个散射点Pi,由于其绕锥旋轴以角速度Ωc旋转,故其在t时刻的坐标向量可以表示为

其中,ri是Pi到旋转中心的距离,φi是散射点初始时刻在本地坐标系中的方位角,且由锥体几何可知φ2=φ1+π。Rinit是初始欧拉矩阵,由初始欧拉角决定,由O′坐标可知此时的初始欧拉角为(0,-θr,-φr)。
Pi做匀速旋转的线速度为vi=riΩc,由于线速度矢量同时垂直于nLOS和OiPi,故t时刻的线速度矢量可以表示为

如图2所示,将目标在雷达坐标系中的三维运动向量投影到XOY平面上,Pi在XOY平面上的投影点的瞬时速度矢量可以写为vi·n⊥,其中是垂直于LOS在XOY平面上投影的单位向量。
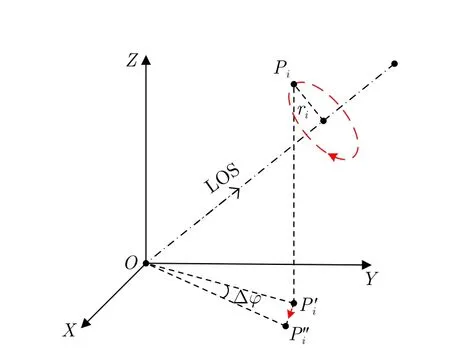
图2 目标微动投影到XOY平面Fig.2 Projection of the target micro-motion to theXOYplane
经过时间Δt(Δt →0),Pi的投影在XOY平面上走过的距离为

其中,η=arctan(cosφrsinθr/sinφr)。Pi历经的方位角变化量为


为了验证上述推导,利用CST电磁计算数据生成了涡旋电磁波雷达锥体目标回波,其中锥体高为2 m,质心坐标为,质心到底面的距离为0.5 m,锥底半径为0.5 m,进动角为12°,锥旋角速度为8π rad/s,假设UCA半径设为0.5 m,雷达工作频率为10 GHz,涡旋电磁波OAM模态数为2,雷达照射时间为1 s。涡旋电磁波回波时频分布如图3(a)所示,图3(b)是根据式(9)的多普勒模型画出的理论多普勒分布曲线,图3(c)是回波中的线性多普勒时频分布图,线性多普勒为0,说明此种情况下回波中只有旋转多普勒频移。从图3可以看出,基于理论多普勒模型的多普勒分布曲线和雷达回波时频分布是吻合的,证明了上述理论的正确性。
3 锥体目标微动参数估计与仿真分析
本节提出一种基于涡旋电磁波旋转多普勒效应的锥体目标参数估计方法,并通过仿真实验进行验证。
3.1 回波信号分离与提取
对回波做时频分析可以得到目标的多普勒分布曲线,从目标的旋转多普勒频移曲线中可以提取出目标参数。通常回波时频分布曲线是粗糙的、宽度较大的曲线,为了提高参数估计精度,一种常用的方法是先将图中多普勒曲线的骨架提取出来,再进行进一步处理,骨架的振幅、频率等特性和原曲线是一致的。
从图3的涡旋电磁波雷达回波时频图中可以看出,目标回波信号中包含2个信号分量,不同散射点的回波多普勒频率在时频平面上相互重叠,提取难度较大,如果继续用基于时频图像的信号分离和参数估计方法将很难估计出精确的目标参数。为了得到不同散射点的精确回波信号分量,本文采用基于参数化解调的信号分离方法[28],其基本思想是利用迭代估计算法,先将估计到的强信号分量从原始信号中剔除,再从剩余信号中估计剩余的弱信号分量参数。
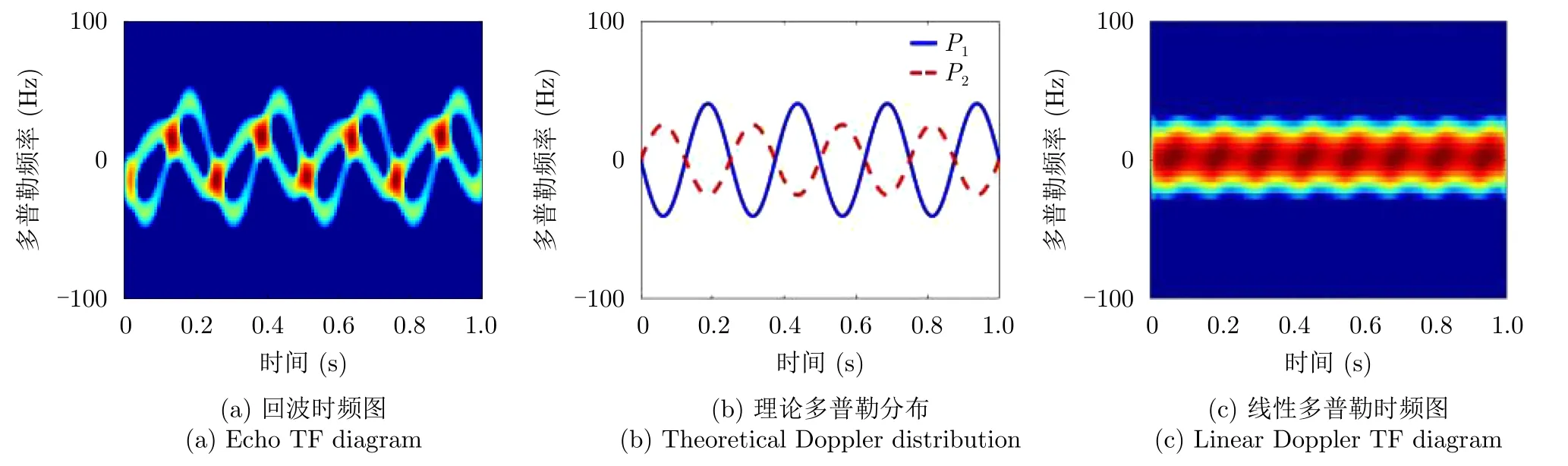
图3 回波时频分布与多普勒模型对比Fig.3 Comparison of echo time-frequency distribution and Doppler model
参数化解调方法可以估计特定信号的模型参数,广义调频信号模型为

其中,A为信号幅值;ψ0为信号初始相位;在本文中,s(t)为涡旋电磁波雷达回波信号,fI(t)为信号瞬时旋转多普勒频率,其表达式可以由式(9)得到。涡旋电磁波回波信号的参数化解调算子可以表示为

其中,g(t;P)为特定的参数化解调函数;P为解调函数的参数集合。将式(10)和式(11)相乘得到解调信号,即

当且仅当fI(t)=g(t;P)时,式(12)为信号能量集中在频率fc处的单频信号,信号频谱值在fc处达到最大。因此,可以通过优化信号模型参数P来使sd(t)在fc处的频谱值达到最大值,即

如果对解调信号再进行调制可以恢复到原始信号

已知锥体目标回波旋转多普勒频率模型为
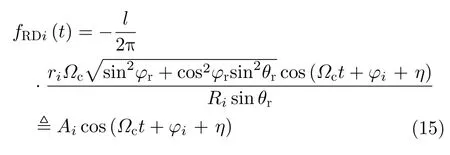
根据参数化解调算子构造涡旋电磁波回波的参数化解调算子,即

其中,将fc设为0是为了将信号解调到基带上,Pi={Ai,Ωc}是待估计的模型参数集,由式(13)可以估计旋转多普勒频率参数为

故不同散射点信号分量分离和提取的具体流程为:
(1) 从回波信号sr(t)中估计第1个散射点的回波多普勒频率参数;
(2) 利用所估计的回波多普勒频率,对回波信号进行解调处理,;
(3) 利用低通滤波器从解(调信号)中提取第1个分量基带信号;
(5) 将提取到的第1个信号分量从总的回波中剔除,就可以得到第2个信号分量(t)=sr(t)(t);
(6) 再分别从两个信号分量中估计目标参数,具体方法将在3.2节提出。
3.2 锥体参数估计
从回波中分离并提取出不同散射点的信号分量之后,接着就可以从不同的信号分量中估计目标参数。由式(9)中的涡旋电磁波回波多普勒模型可以得到P1和P2回波中的旋转多普勒频率分别为
其中,A1,A2是多普勒频率函数的幅度项。
观察式(18)和式(19)可知,不同散射点的旋转多普勒频移是幅值不同、相位和角频率相同的正弦调制函数,与OAM模态数成正比,正弦频率就是目标锥旋频率;旋转多普勒频移幅度中耦合了锥体的运动参数和几何参数,从中可以反演出锥体参数;由于锥体的几何特性,锥顶散射点P1和锥底散射点P2初始方位角相差半个周期,导致它们的旋转多普勒频移的起点也是不同的;当(Ωct+φ1+η)=0或 2π 时,fRD1和fRD2分别达到最小值和最大值,据此可以分别估计出P1和P2的旋转半径。
由3.1节的参数化解调方法可以得到一组参数,在此基础上进一步求解具体参数。从参数化多普勒分布曲线中可以得到P1的旋转多普勒频移最小幅度估计值()min和P2的旋转多普勒频移最大幅度估计值()max,由式(18)和式(19)可知它们的真实值分别为
由此得到P1和P2的旋转半径的估计值分别为
又由于真实值r1=(H -h)sinθc,r2=hsinθc+racosθc,故

通过一维距离像序列可以得到P1和P2在一维距离像上的投影长度估计值分别为和,由于R2=R0+hcosθc-rasinθc,R1=R0-(H -h)cosθc,故

将式(21)和式(22)联立可以消去h,得到

此外,由锥体几何可以得到锥顶到质心的估计长度为

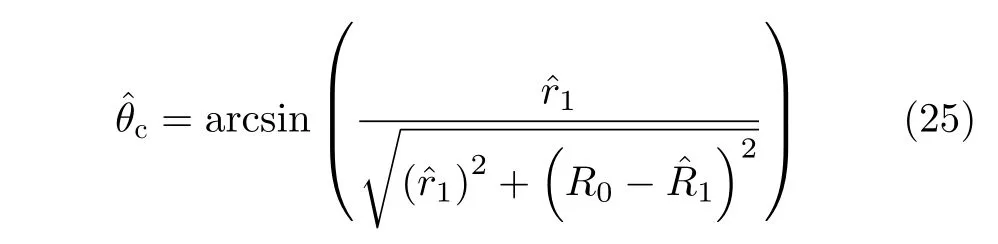
将式(24)代入式(21)中可以得到进动角估计值为
(1) 由参数化解调方法提取得到参数化多普勒分布;
(2) 从参数化多普勒分布曲线中P1的旋转多普勒频移最小幅度估计值()min和P2的旋转多普勒频移最大幅度估计值()max,并由此估计出P1和P2的旋转半径和;
(3) 根据一维距离像序列可以得到P1和P2的距离像投影长度,据此可以估计出进动角;
综上,基于涡旋电磁波旋转多普勒效应的锥体目标参数估计方法流程图如图4所示。
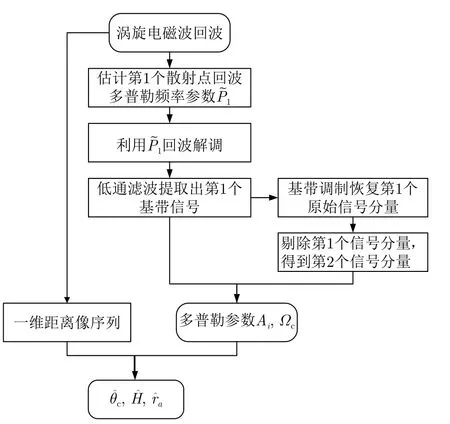
图4 信号分离及参数估计方法流程Fig.4 Flowchart of the signal separation and parameter estimation method
3.3 仿真实验及分析
为了说明上述分析的准确性和参数估计方法的有效性,本节通过仿真实验进行验证,并对实验结果进行分析。主要实验参数设置如下,假设UCA半径设为0.5 m,雷达工作频率为10 GHz,假设锥体质心在雷达坐标系中的极坐标为O′(20,π/30,π/3)T,锥旋角速度为Ωc=8π rad/s,进动角为θc=π/15,锥体高为H=2 m,质心位置为h=0.5 m,锥底半径ra=0.5 m。涡旋电磁波的OAM模态数为30,雷达照射时间为1 s。基于涡旋电磁波雷达锥体目标理想点回波数据进行仿真实验,分别画出锥体目标的一维距离像序列、回波时频分布图和参数化回波多普勒曲线。
仿真结果如图5所示,其中图5(a)是观测到的一维距离像序列,由于散射点到雷达的径向距离是恒定值,故两个散射点的一维距离像都是直线,与理论分析相符。从一维距离像序列中可以得到P1和P2在一维距离像上的投影长度估计值分别为=18.45 m 和=20.25 m。此时的涡旋电磁波雷达回波时频图如图5(b)所示,图5(c)是从雷达回波中提取出的参数化多普勒曲线,从曲线中可以分别获得P1的旋转多普勒频移最小幅度估计值()min=-31.75和P2的旋转多普勒频移最大幅度估计值()max=46.57,由式(20)可以算出P1和P2的旋转半径的估计值分别为=0.4031 m 和rˆ2=0.6359 m。再根据式(25)可以得到进动角的估计值为=14.5758°,最后综合式(21)和式(22)可以得到锥体几何参数估计值分别为=2.0105 m,=0.4089 m,=0.5426 m。
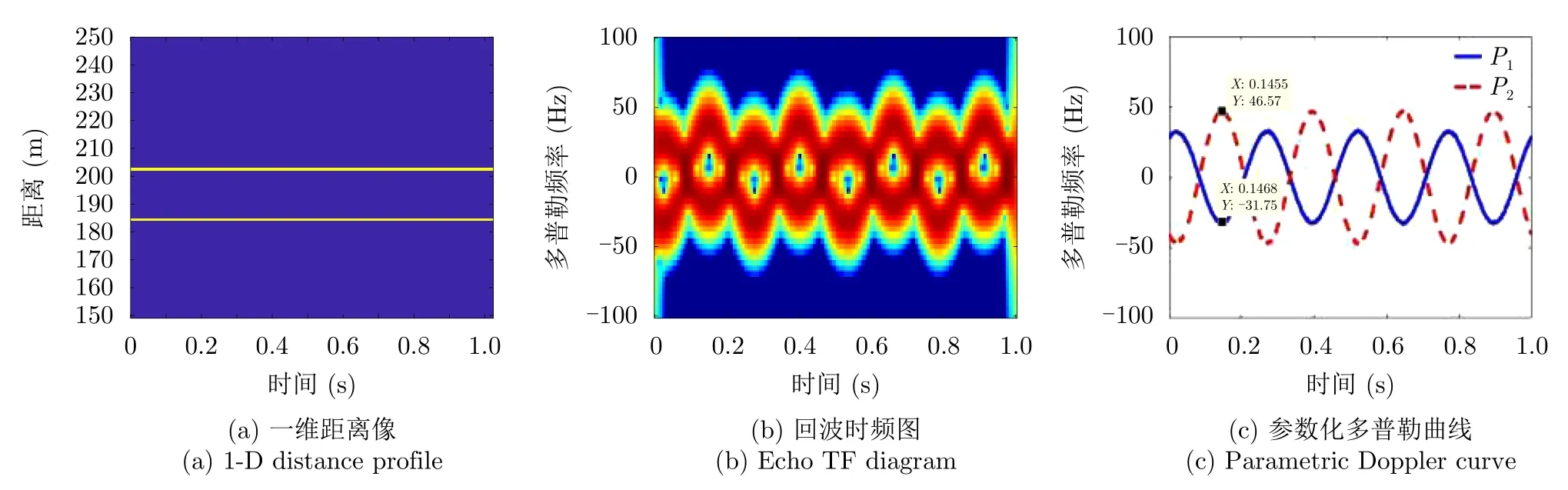
图5 仿真结果Fig.5 Simulation result
这样,锥体目标的运动参数和几何参数就都被估计出来了,估计结|果如表|1所示,其中的估计误差是归一化误差。
从表1可以看出,锥体目标的运动参数估计误差均小于3%,几何参数中锥高估计误差均小于1%,锥底半径估计误差小于10%,说明本文提出的基于涡旋电磁波旋转多普勒效应的锥体目标参数估计方法可以对锥体目标参数进行有效估计。
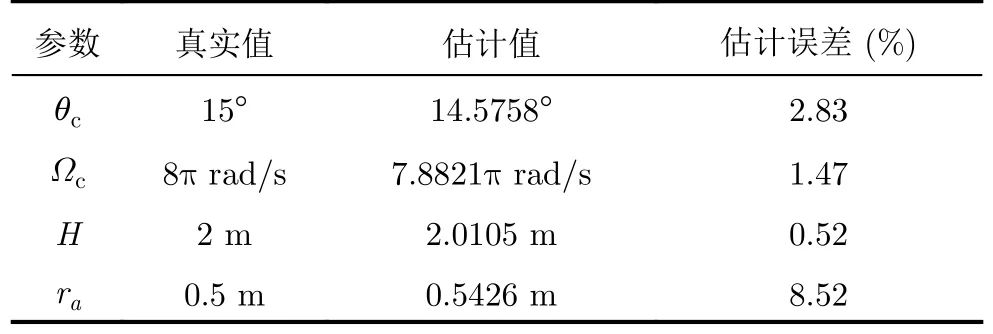
表1 参数估计结果Tab.1 Parameter estimation result
为了检验上述方法在噪声环境下的参数估计性能,在6组不同噪声环境下的仿真实验,信噪比(Signal-to-Noise Ratio,SNR)分别设置为SNR=0,S N R=5,S N R=1 0,S N R=1 5,S N R=2 0 和SNR=25,每组进行100次Monte Carlo仿真。不同信噪比下的目标参数估计误差如图6所示。根据上述的参数估计方法对这5种环境下的目标参数进行估计,从图6的结果可以看出,在信噪比大于10 dB时,目标参数估计误差均小于10%,说明此方法在噪声环境下依然保持了较为稳健的估计效果。
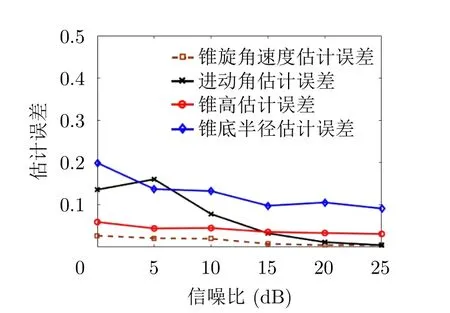
图6 不同信噪比下的目标参数估计误差Fig.6 Target parameter estimation error under different SNR
在参数估计结果中,锥旋角速度的估计误差一直相对最小,这主要是由于微动周期是使用参数化解调方法直接估计得到,故的估计精度也相对较高。进动角的估计误差随着信噪比的改善而越来越小,估计性能有显著改善,这主要是由于进动角与一维距离像序列的提取精度紧密相关,而基于一维距离像序列的参数估计抗噪声性能较差。而在锥体几何参数估计中锥底半径估计误差一直相对较高,这主要是由于锥底半径实际值相对最小,所以在估计时受到其他参数的影响也最大。
4 结论
本文对涡旋电磁波锥体目标参数估计问题进行了研究,受轨道角动量调制的涡旋电磁波具有独特的螺旋形相位波前,能够获取横向上的运动信息,其引起的旋转多普勒效应为雷达目标探测提供了一个新思路。锥体微动会对涡旋电磁波回波瞬时频率产生周期调制,可以反映出锥体运动参数和几何特性。基于涡旋电磁波的旋转多普勒效应,本文提出了一种前视条件下的锥体参数估计方法。在前视条件下,涡旋电磁波回波中没有线性多普勒频移,其旋转多普勒频移中耦合了锥体的运动参数和几何参数,利用旋转多普勒效应可以有效提取出横向微动分量,可以有效提升雷达在特定运动场景下的目标识别能力。仿真实验表明,锥体目标锥旋角速度、进动角、锥高和锥底半径等参数的估计精度都比较高,说明本文提出的基于涡旋电磁波的锥体目标参数估计方法可以对锥体目标参数进行有效估计,并且在一定的噪声水平下依然有效。