涡旋电磁波雷达成像分辨力研究
2021-11-07王建秋王宏强
王建秋 刘 康 王 煜 王宏强
(国防科技大学电子科学学院 长沙 410073)
1 引言
雷达成像技术[1-3]不受气候条件限制,在军事和民用领域中得到了充分发展和应用。以合成孔径雷达[4-6]为代表的雷达成像技术,结合带宽信号与合成孔径处理实现目标高分辨图像。然而,距离-多普勒原理要求雷达工作在侧视或者斜视模式,难以实现前视目标成像,存在固有的视野盲区。为延拓雷达成像视场范围,以单脉冲成像技术[7]、阵列成像技术[8]、波束扫描-解卷积成像技术[9]为代表的前视成像方案得到广泛关注,尽管分辨性能多数受限于实孔径或超分辨算法,但相关研究极大促进了雷达前视成像技术的发展。
回波相位差异性是雷达成像的关键。传统成像雷达通过雷达-目标间相对运动、波束扫描、阵列等方式在目标处形成差异性激励相位,并结合回波特性提出成像方法,实现目标成像。然而,当对电磁波波前进行特殊调制,即电磁波不再以等相位波前形式与目标相互激励,而是以特定差异性调制的波前与目标相互作用,同样可以使得目标信息被差异性度量。因此,通过合理设计波前调制方式,有望使得回波调制上更为丰富的目标信息,实现前视成像。
近年来,波前调制雷达成像技术逐步发展,形成以微波关联成像[10]为代表的随机波前调制技术和以涡旋电磁波雷达成像[11]为代表的确定波前调制技术。前者通过构造时空不相关的探测信号形成随机辐射场,而后者基于轨道角动量[12-15](Orbital Angular Momentum,OAM),对电磁波相位波前进行调控,形成辐射场相位分布呈螺旋状的涡旋电磁波。在涡旋电磁波照射下,目标方位角与OAM模式数间构成了傅里叶变换意义下的对偶变量,不依赖于雷达-目标间相对运动、波束扫描、阵列等传统方式,形成了新的、独立的方位相位项,有望实现前视目标超分辨成像。文献[16]建立了涡旋电磁波雷达二维成像模型,提出了基于二维傅里叶变换的成像方法,实现了多发-多收和多发-单收模式下前视目标二维成像。针对不同模态波束指向不一致问题,文献[17]提出了基于同心圆环阵列的涡旋电磁波雷达成像方法,通过设计不同圆环阵列半径实现主瓣指向一致,大大提升了成像质量。面向更高分辨、更低OAM模态成像需求,文献[18]和文献[19]研究了基于多信号分类算法、基于旋转不变技术的信号参数估计算法的超分辨成像,文献[20]则建立了稀疏表征的涡旋电磁波雷达成像模型,研究了稀疏贝叶斯学习、增强稀疏贝叶斯学习、变分贝叶斯推理等重构方法,仿真和实测结果验证了有效性。此外,文献[21]还研究了双模态复用成像方法,在相同OAM模态范围照射下,该成像模式下能节省50%的照射积累时间,大大提高成像效率。
随着涡旋电磁波雷达成像技术的发展,在涡旋电磁波产生与调控、辐射场优化与设计、涡旋电磁波雷达成像原理与模型、成像方法以及实验验证等方面取得一系列重要成果,验证了涡旋电磁波雷达成像技术的可行性。面向实际应用,需进一步提升涡旋电磁波雷达前视成像分辨性能。一方面,当前各类成像超分辨算法的提出,相对集中地展现了超分辨成像方法在提升分辨性能方面的潜力。另一方面,从成像体制角度,系统分析分辨力影响因素,进行雷达参数设计,有望提升涡旋电磁波雷达方位基本分辨力。本文将重点对方位成像基本分辨力展开研究,为面向分辨性能提升的涡旋电磁波雷达参数设计与优化提供参考。
2 涡旋电磁波雷达成像原理
基于圆形阵列天线(Uniform Circular Antenna,UCA)产生携带不同OAM模态的涡旋电磁波,如图1(a)所示,N天线阵元均匀分布于半径为a的圆周上,相邻两阵元之间调制相位差为Δφ=2πl/N,l为OAM模式数。每个阵元发射带宽为B、调频率为K的线性调频信号,附有确定相位调制量ϕn=2π(n-1)/N,n=1,2,...,N。单个接收天线位于坐标原点,则空间任意位置P(r,θ,φ)处目标散射回波为[16,22]
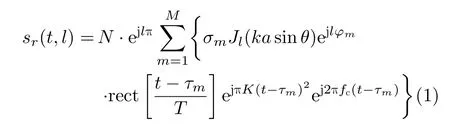
其中,t为快时间变量,T为脉冲持续周期,fc为信号中心频率,k为波数。M为目标散射点个数,τm为目标时延,Jl(·)为l阶第1类Bessel函数。
与传统电磁波等相位波前激励相比,不同模态涡旋波照射,使得回波中蕴含的目标信息不尽相同,主要体现在附加项Jl(kasinθ)·ejlφm中。发射带宽信号频率与目标斜距间对偶关系为距离向分辨提供了有效支撑,而OAM模式数与目标方位间对偶关系则为方位向提供了分辨基础,因此通过发射携带不同轨道角动量模态、具有一定带宽的涡旋电磁波,可实现雷达目标前视二维成像,成像处理流程如图1(b)所示。
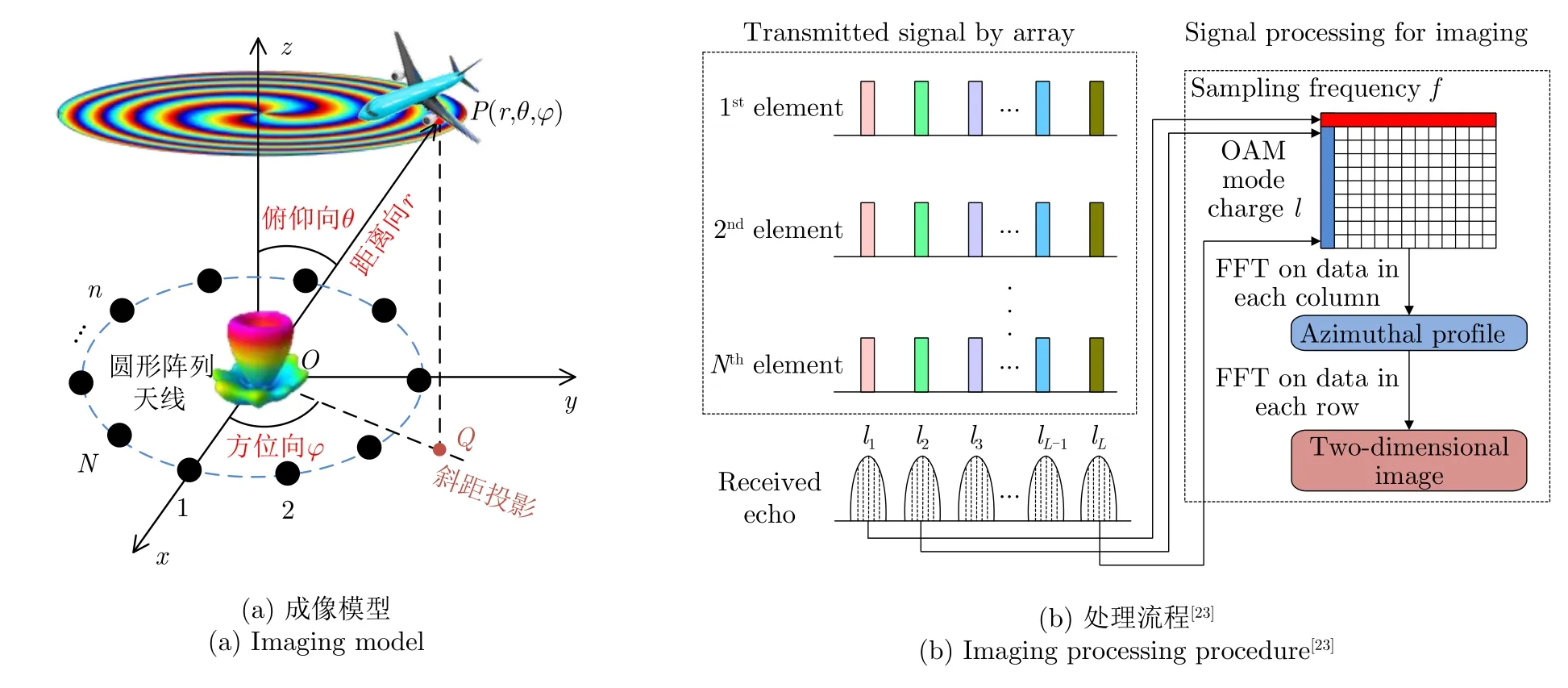
图1 涡旋电磁波雷达成像示意图Fig.1 Diagram of the vortex electromagnetic radar imaging
3 涡旋电磁波雷达成像分辨力分析
基于涡旋电磁波雷达成像原理,理论上遍历大OAM模态范围照射,能实现更佳的分辨效果。然而,由于涡旋电磁波独特的物理属性,其不可避免地存波束中空,也存在随OAM模式数变化的幅度项Jl(kasinθ),显然,第1类贝塞尔函数窗的幅度加权将直接影响目标方位分辨性能。因此,本节将从考虑贝塞尔幅度项与否两个角度入手,分别分析涡旋电磁波雷达方位成像分辨力。
3.1 忽略贝塞尔幅度项的涡旋电磁波雷达方位分辨性能分析
本文所述雷达工作在多发-单收方式。约定轨道角动量变量l对应OAM时域,其进行傅里叶变换得到的频域变量fl对应OAM频域。在同等配置情况下,实孔径成像雷达的方位空间分辨率ρrel由天线孔径D=2a、工作波长λ以及雷达-目标间距离RT决定[18,22]。

对于涡旋电磁波雷达,根据式(1)所推导的回波模型,不考虑贝塞尔幅度项、仅考虑包含目标方位角信息的相位项exp(jlφ)时,雷达极坐标系下的目标方位角φ与OAM模式数l之间构成傅里叶变换意义下的对偶变量,且OAM变量l与 快时间变量t之间不存在耦合关系,可直接在OAM域中进行傅里叶变换实现目标方位成像,对应扩展函数表示为

其中,lmax=-lmin为最大OAM模式数。目标方位角分辨率ρφ可由扩展函数第一零点位置表征。此外,根据空间几何关系,定义涡旋电磁波雷达空间方位分辨率为ρvor,超实孔径雷达分辨率为γ,则有
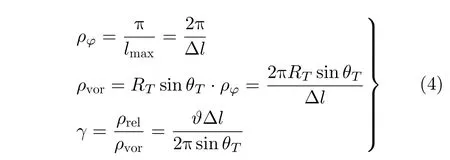
由于UCA产生的非0模态涡旋波束宽度不为λ/D,故定义涡旋电磁波雷达波长孔径比(Ratio of Wavelength to Aperture,RWA)为ϑ=λ/D。得知,空间分辨率与目标距离、成像俯仰角以及OAM模态范围有关;超实孔径雷达分辨性能则与波长孔径比、OAM模态范围、成像俯仰角有关。图2(a)、图2(c)、图2(e)分别仿真了空间分辨率随成像距离、成像俯仰角以及OAM模态范围的变化曲线,可见,成像距离越近、成像仰角越小、OAM模态范围越大,空间方位分辨率越高。图2(b)、图2(d)、图2(f)则给出了超实孔径雷达分辨率关于波长孔径比、成像俯仰角以及OAM模态范围变化的曲线,可见,波长孔径比越大、OAM模态范围越大、成像俯仰角越小,超实孔径雷达分辨性能越好。从物理机制角度看,一方面,忽略贝塞尔幅度项影响时,涡旋电磁波雷达不受波束能量中空、不同OAM模态波束指向不一致影响,波束内目标能被不同OAM模态涡旋电磁波的差异性辐射场有效度量;另一方面,尽管实际中不同OAM模态回波的信噪比性能表现不一致,若雷达系统具有足够高的灵敏度,仍然能提取出目标相位差异性信息。涡旋电磁波具有理论无限正交本征态,且随着遍历照射的OAM模态范围越大,成像俯仰角越小,与目标相互激励的辐射场螺旋相位变化越剧烈,更多轨道角动量模态将调制上目标方位角信息,相当于在由无限正交OAM本征态张成的一个无穷维Hilbert观测空间中,不断延拓目标方位角信息在轨道角动量这一观测域中的被观测长度,理论上分辨性能可无限提升。
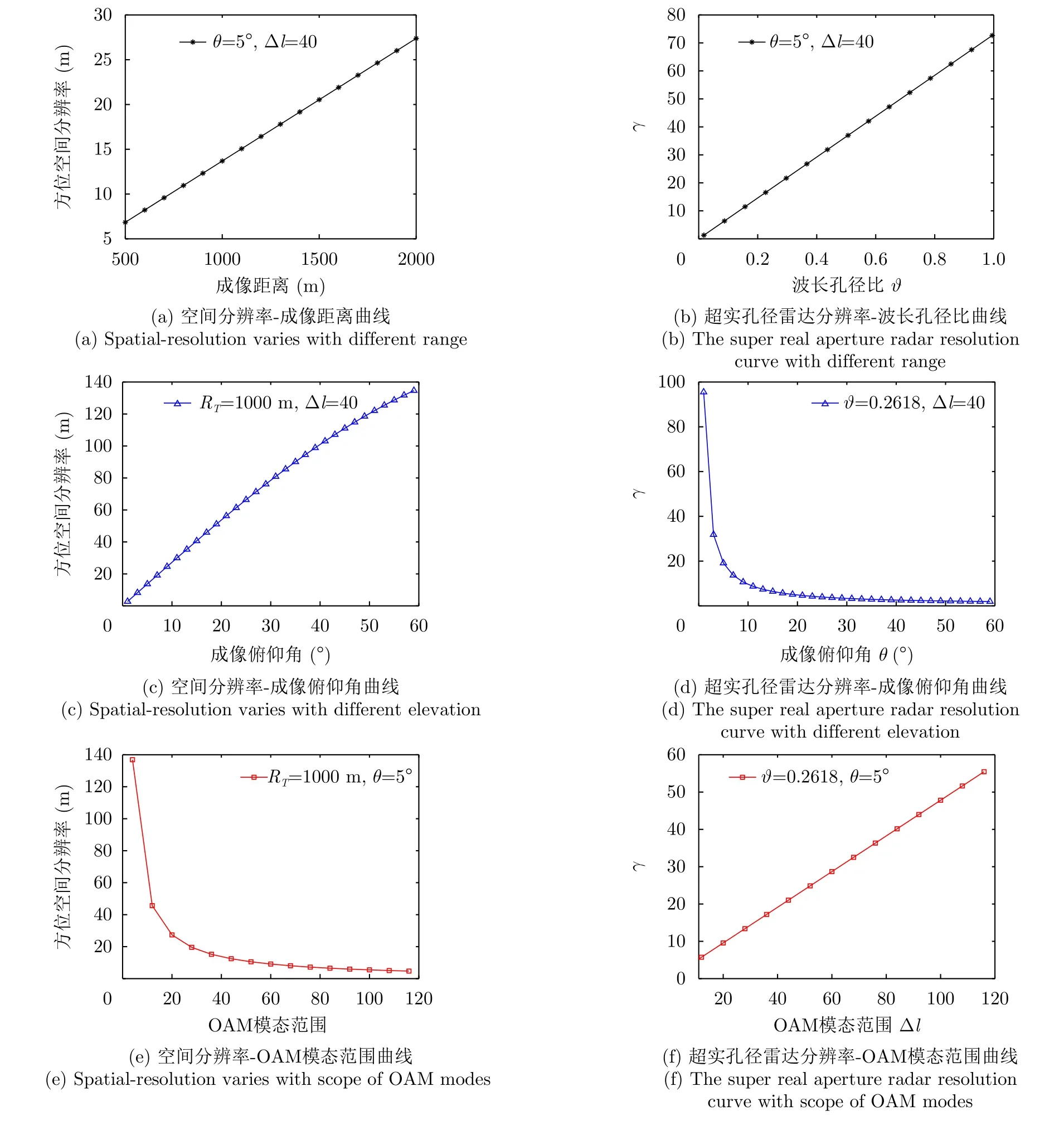
图2 理想情况涡旋电磁波雷达方位空间分辨率以及超实孔径雷达分辨率曲线Fig.2 Ideally spatial-resolution and the super resolution as a function of different influence factors
3.2 考虑贝塞尔幅度项的涡旋电磁波雷达方位分辨性能分析
忽略贝塞尔幅度项的影响,通过参数设计,涡旋电磁波雷达成像能实现良好的空间分辨率以及超实孔径雷达分辨效果。然而,实际回波受到贝塞尔幅度项Jl(kasinθ)调制,其特殊数学性质表现出的幅度加权形式,将对方位分辨性能产生影响。
3.2.1 贝塞尔幅度项相位补偿
贝塞尔幅度项Jl(kasinθ)=Jl(π sinθ/ϑ),是关于OAM模式数的函数。如图3(a)所示,一方面,贝塞尔幅度项绝对值会随着OAM模式数的变化而变化,表现为OAM时域回波的幅度加权窗;另一方面,贝塞尔幅度项符号也会随着OAM模式数的变化而发生改变。当贝塞尔项呈现负值时,将会在OAM时域引入一个相位干扰项exp(jπ),导致点目标方位扩展函数如图3(b)中蓝色曲线所示,不具有类sinc函数包络形状,无法实现方位聚焦成像。图中仿真参数设置为:圆环阵列半径a=0.2149 m、中心频率fc=10 GHz、成像俯仰角θT=30°、OAM模态范围l∈[-20,20]。文献[22]针对这一问题中提出了相位补偿方法:

图3 贝塞尔相位补偿及对应的点扩展函数图Fig.3 Bessel term compensation and the corresponding point spread function of azimuth

通过在OAM时域乘以相位补偿因子式(5),补偿后点目标方位扩展函数为

经相位补偿,结果如图3(a),图3(b)中红色实线所示,可以发现,贝塞尔幅度项关于OAM时域包络整体呈现正值,类sinc函数包络表明能实现目标聚焦成像。
3.2.2 贝塞尔幅度项影响有效OAM模态范围
考察涡旋电磁波雷达方位向成像过程,在OAM时域回波中表现为幅度加权窗函数wl(θ,ϑ)=|Jl(π sinθ/ϑ)|与相位项ejlφT的乘积形式,根据傅里叶变换性质,转换到OAM频域中,则可以表示为F[wl(θ,ϑ)]与F[exp(jlφT)]的卷积形式:

其中,F[·]为傅里叶变换符号,⊗为卷积符号。F[exp(jlφT)]=δ(fl-φT/2π)为关于目标方位的冲激函数,F[wl(θ,ϑ)]则为方位成像包络。
由3.1节分析可知,不考虑贝塞尔幅度项,等效于对OAM时域回波幅度进行了矩形窗rect(l,Δl)加权,发射端遍历的OAM模态范围越大,等效的OAM时域矩形窗越宽,对应得到的方位分辨性能越好。然而,在贝塞尔幅度加权窗wl(θ,ϑ)影响下,高阶模态回波能量不断减弱,使得发射端遍历不同OAM模态得到的回波成分对成像分辨力贡献不同,进而导致方位分辨性能不再由实际发射OAM模态范围 Δl决定,而是由实际有效OAM模态范围Δleffective决定。
由于贝塞尔幅度窗wl(θ,ϑ)是关于成像俯仰角θ和波长孔径比ϑ的函数,故不同的参数设计与选取,将使wl(θ,ϑ)表现出不同的加权窗形式,进而影响有效OAM模态范围Δleffective以及分辨性能。图4(a)给出了小成像俯仰角场景/小波长孔径比情况下贝塞尔幅度项-OAM模式数的变化曲线,成像方位剖面如图4(b)所示,可以发现,当OAM照射模态由lmax=2增加到lmax=4时,剖面图明显变“窄”,而当OAM模态由lmax=4增加到lmax=5,甚至lmax=40时,得到方位剖面几乎重合,意味着固定天线波长孔径比、成像俯仰角参数时,增加OAM模态范围照射并不能持续提升方位分辨性能,只有增大有效OAM模态照射才能提升方位分辨性能。这一点可以从图4(a)中得到验证,绿色点划线为实际有效OAM模态窗,当OAM模态超出有效窗范围,OAM回波幅值急剧衰减,逐渐趋向于零。
图4(c)和图4(d)进一步仿真了大成像俯仰角下贝塞尔项-OAM模式数曲线和方位剖面图,与图4(a)和图4(b)相比,有效OAM模式数范围更宽,方位剖面更“窄”。本质原因是在相同UCA波长、孔径参数下,随着OAM模式数的增大,涡旋电磁波束指向角越大,导致小成像俯仰角处目标仅能被少数OAM模态照射,而大俯仰角处目标能被更多OAM模态照射。图4(e)和图4(f)则分析了大波长孔径比条件下的贝塞尔项-OAM模式数曲线和方位剖面图,与图4(a)和图4(b)相比,有效OAM模式数范围更窄,方位剖面更“宽”。原因在于相同成像俯仰角下,波长孔径比越大的UCA产生相同OAM模态涡旋电磁波指向越大,导致目标仅能被少数OAM模态照射,有效OAM模态减少,分辨率降低。
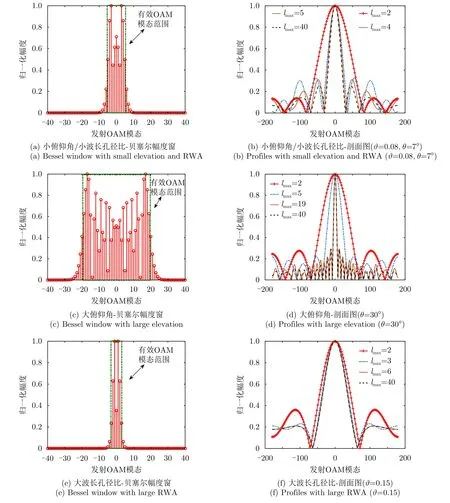
图4 不同参数下贝塞尔幅度窗及方位剖面图Fig.4 Bessel windows and azimuth profiles with different parameters
波长孔径比越小、成像俯仰角越大,有效OAM模态范围越大,实现的方位角分辨性能越佳。然而,涡旋电磁波雷达方位空间分辨率是由方位角分辨和成像几何关系共同决定的,因此,需要结合有效OAM模态范围和成像几何关系,分析空间分辨性能及超实孔径雷达分辨性能。
3.2.3 有效OAM模态范围计算与分辨性能分析
上节提出涡旋电磁波雷达方位分辨性能由有效照射OAM模态范围决定。本节首先给出有效OAM模态范围的计算方法,然后基于有效OAM模态理论分析涡旋电磁波雷达方位空间分辨性能以及超实孔径雷达分辨性能。
贝塞尔幅度窗wl(θ,ϑ)是关于OAM模式数、成像俯仰角以及波长孔径比的函数,没有数学解析式,难以直接得到方位扩展函数。因此,本文提出了一种基于数值计算的有效OAM模态范围确定方法,计算流程如图5所示,首先,根据发射信号中心频率、UCA孔径以及成像俯仰角等参数,借助数值计算软件仿真得到该输入参数下的方位剖面图,以(Impulse Response Width,IRW)指标衡量方位角分辨率,计算对应剖面图IRW值;然后,通过遍历不同OAM模态范围照射,得到方位IRW值-不同OAM模态范围的曲线;最后,根据上节中理论分析易知,随着OAM模式数的增大,方位分辨性能不断提升,当最大发射OAM模式数增加到lthreshold时,此后再继续增加发射OAM模式数,方位分辨性能不再提升,而该临界值lthreshold则对应有效OAM模态范围Δleffective=2lthreshold。
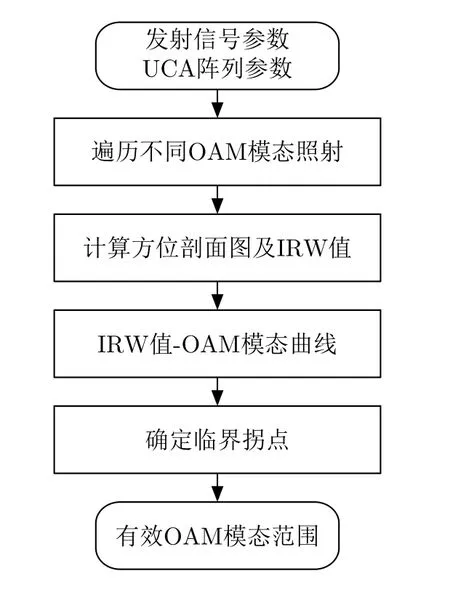
图5 有效OAM模态范围计算流程Fig.5 The flowchart of the effective OAM modes scope calculation
因此,在贝塞尔幅度项影响下,方位分辨性能不再由发射端遍历的OAM模态范围决定,而是由实际有效OAM模态范围决定,修正后方位分辨率、空间分辨率以及超实孔径雷达分辨率可以表示为
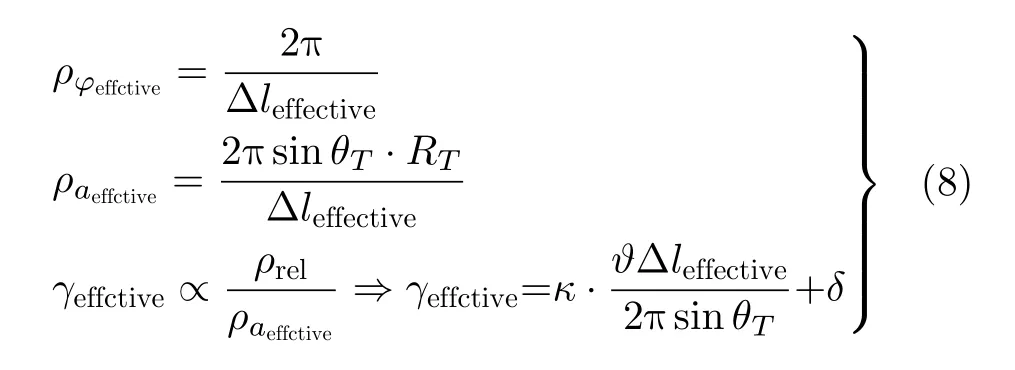
其中,κ,δ为固定常数系数。
图6(a)展示的是成像俯仰为 7°、不同波长孔径比下的方位IRW-最大发射OAM模态曲线,根据有效OAM模态范围计算方法,得到不同波长孔径参数下的有效OAM模态范围Δleffective分别为20,28和92。结果与理论分析一致:随着波长孔径比增大,有效OAM模态范围不断缩小。图6(b)则表明随着波长孔径比增大,方位空间分辨率不断下降;固定波长孔径比,改变成像俯仰角,得到方位IRW-最大发射OAM模态曲线如图6(c)所示,空间分辨率-最大发射OAM模态曲线如图6(d)所示,可以发现,随着成像俯仰角的增大,方位角分辨率得到提升,但空间分辨率却不断下降,其原因在于大俯仰角对空间分辨率的恶化程度强于方位角分辨率对空间分辨率的提升程度。
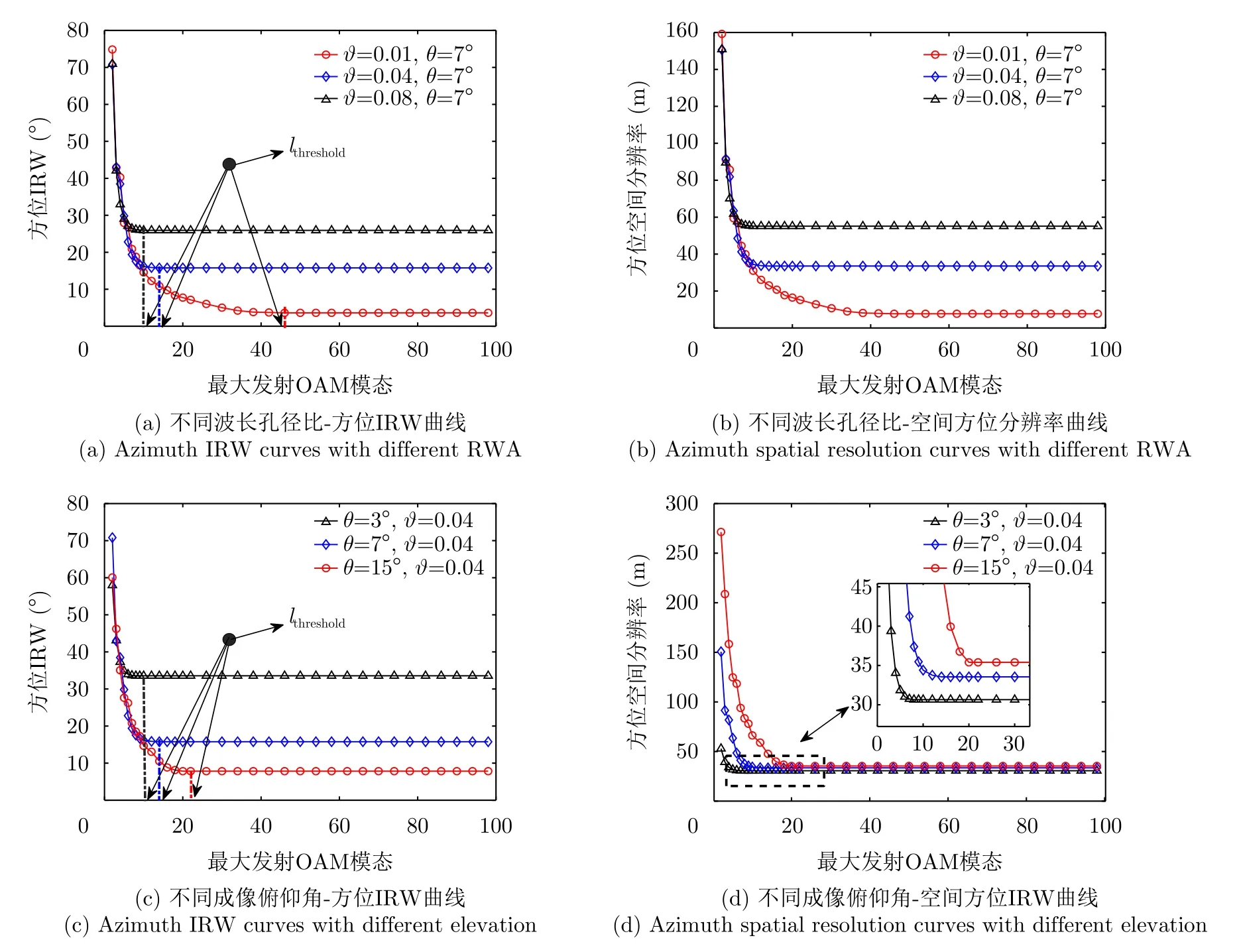
图6 方位分辨率及空间分辨率曲线Fig.6 Curves of azimuth resolution and spatial resolution
超实孔径雷达分辨率随波长孔径比和成像俯仰角的变化曲线如图7(a)和图7(c)所示,图7(b)和图7(d)则进一步仿真了超实孔径雷达分辨率/最大有效OAM模式数关于波长孔径比和成像俯仰角的曲线。比较图7(a)和图7(b)可以看出,随着波长孔径比的增大,方位超实孔径雷达分辨性能不断提升,对应的有效OAM模态范围呈下降趋势。比较图7(c)和图7(d)可以发现,随着成像俯仰角的增大,方位超实孔径雷达分辨性能呈下降趋势,而有效OAM模态范围呈现扩大趋势,意味着方位角分辨率对超实孔径雷达分辨性能的提升效果弱于成像俯仰几何关系对超实孔径雷达分辨性能的影响。
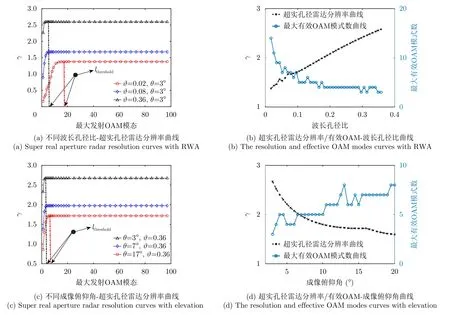
图7 方位超实孔径雷达分辨率曲线Fig.7 Curves of azimuth super real aperture radar resolution
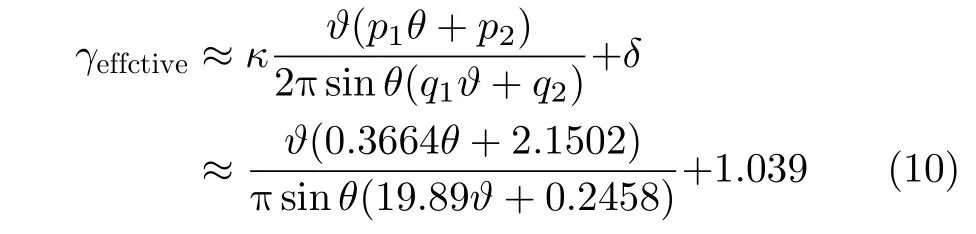
此外,由于贝塞尔幅度项为三元函数,且没有解析表达式,难以直接推导其OAM频域变换结果,得到有效OAM模态范围。因此,本文从数据拟合角度,得到有效OAM模态范围与超实孔径雷达分辨率的一组近似表达式。仿真参数设置为:波长孔径比ϑ∈[0.018,0.36],成像俯仰角θ∈[1°,40°],遍历不同OAM模态范围lmax∈[1,100]。基于本文所提方法,得到有效OAM模态范围随波长孔径比、成像俯仰角的变化结果,如图8(a)中计算结果曲面所示。通过数据分析发现,计算得到的有效OAM模态范围Δleffective与成像俯仰角θ、波长孔径比倒数ϑ-1都近似成正比,式(9)为有效OAM模态范围函数的近似表达式,拟合结果如图8(a)中粉色曲面所示。图8(b)则给出了有效OAM模态范围计算结果与拟合结果间误差曲面,可以发现整体拟合效果较好,仅在ϑ∈[0.017,0.03]很小区域内的拟合误差偏大。

同样地,基于本文所提方法,得到超实孔径雷达分辨率随波长孔径比、成像俯仰角的变化结果,如图8(c)中计算结果曲面所示。进一步结合式(8)、式(9),拟合得到超实孔径雷达分辨率表达式为
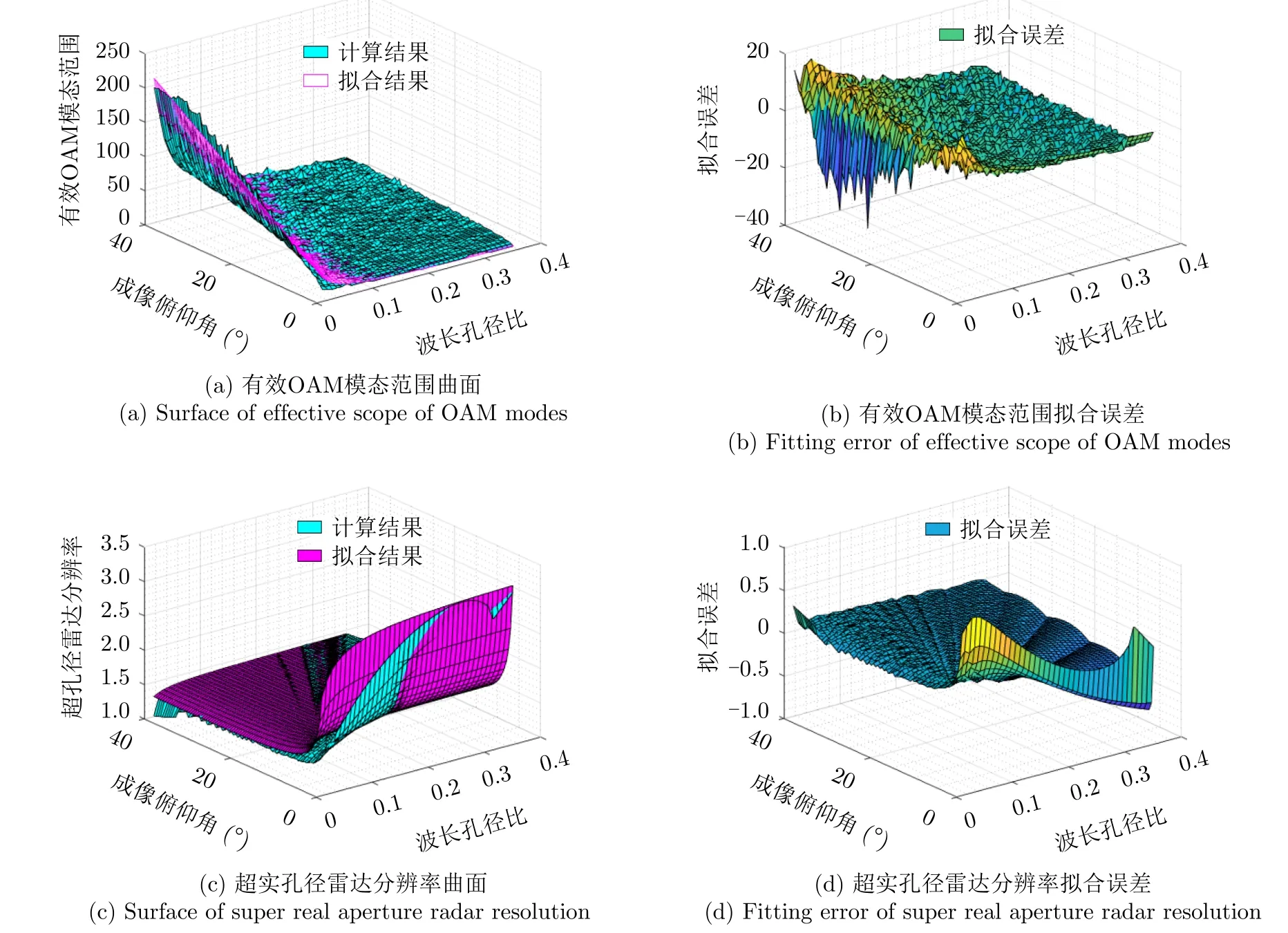
图8 有效OAM模态范围与超实孔径雷达分辨率函数拟合Fig.8 Effective OAM modes scope and super real aperture radar resolution function fitting
综上,随着波长孔径比的增加,涡旋电磁波雷达方位角分辨性能不断下降,空间分辨性能不断下降,而超实孔径雷达分辨性能不断提升;随着成像俯仰角的增加,方位角分辨性能不断提升,空间分辨性能不断下降,超实孔径雷达分辨性能也不断下降;而随着OAM模式数的增大,方位角分辨、空间分辨和超分性能都表现为先不断提升,当达到有效OAM模态范围后,性能趋于稳定。因此,改变波长孔径比、成像俯仰角参数不能同时提升方位角分辨率、空间分辨率和超实孔径雷达分辨率。需在不改变波长孔径比、成像俯仰角前提下,提升有效OAM模态范围,如采用AR超分辨谱估计、稀疏超分辨重构等方法实现有效OAM模态范围延拓,实现3个性能同时提升。
4 结论
本文分别从考虑与不考虑贝塞尔项的涡旋电磁波雷达成像模型出发,基于点目标扩展函数,对方位成像分辨力展开研究。不考虑贝塞尔幅度项时,理论上,增大OAM模态照射范围,方位分辨性能可无限提升。考虑贝塞尔幅度项影响,首先,分析了方位成像过程,揭示了方位分辨性能受贝塞尔幅度窗影响,由有效OAM模态范围决定的现象:有效OAM模态范围越大,方位分辨性能越好。其次,提出了一种有效OAM模态范围计算方法,得到修正后的方位角分辨率、空间分辨率以及超实孔径雷达分辨率表达式。最后,通过仿真实验对方位分辨性能影响因素展开分析,揭示了其变化规律:随着波长孔径比的增加,方位角分辨率不断下降,方位空间分辨率不断下降,而超实孔径雷达分辨率不断提升;随着成像俯仰角的增加,涡旋电磁波雷达方位角分辨率不断提升,方位空间分辨率不断下降,而超实孔径雷达分辨率不断下降。面向实际应用,未来研究工作应重点关注涡旋电磁波雷达成像体制设计与超分辨成像方法,在不改变波长孔径比、成像俯仰角参数前提下,研究贝塞尔幅度项补偿方法,增大有效OAM模态范围,实现涡旋电磁波雷达方位角分辨率、方位空间分辨率以及超实孔径雷达分辨率的大幅、同时提升。此外,更为精准的有效OAM模态范围及超实孔径雷达成像分辨率函数关系拟合,将为涡旋电磁波雷达系统设计与优化提供重要支撑。