基于涡旋电磁波体制的三维SAR成像方法
2021-11-07刘宏伟
吕 坤 马 晖 刘宏伟
(西安电子科技大学雷达信号处理国家重点实验室 西安 710071)
1 引言
涡旋电磁波概念是近年来电磁学的几大热点研究之一。根据经典电动力学,电磁波的远场辐射特征参量包括能量与角动量。光学研究中首先发现光波除了自旋角动量(即极化效应)之外,还可同时具有轨道角动量(Orbital Angular Momentum,OAM)。之后,学者们发现OAM这一概念也适用于低频无线电波,并将携带有OAM的电磁波命名为涡旋电磁波(ElectroMagnetic Vortex,EMV),简称涡旋波或OAM波[1-7]。与平面电磁波不同,携带OAM的涡旋电磁波产生特定的场相位分布。该场相位分布是解析的,且与其本征态有关。OAM将涡旋电磁波传播的宏观形式描述为方位维周期变化的相位和发散的波束能量[8]。OAM对应的模态域可作为时、频、极化域之外的全新复用维度,应用于通信、雷达、感知等系统中。
在雷达领域,涡旋电磁波的OAM模态所对应的独立分辨维度可以为目标检测或成像提供新的信息。在平面波框架中,合成孔径雷达(Synthetic Aperture Radar,SAR)成像、实孔径雷达成像等二维雷达成像系统已经发展成熟[9]。其中通过孔径维的相干积累、数字波束形成(Digital Beam Forming,DBF)或基于随机空间采样的场景重建可以获得孔径维上距离切向对应的横向分辨率[10]。当引入涡旋波OAM模态后,只要观察到足够的本征模,就可以通过从OAM模态域到方位角域的快速傅里叶变换(Fast Fourier Transform,FFT)简单、快速地得到方位角维的信息[11]。文献[12]研究了在SAR成像中以单模态涡旋电磁波代替平面波的成像算法,以旁瓣增高的代价获得了更好的横向分辨率。
SAR成像通常发射大时宽带宽积的信号,通过脉冲压缩获得距离高分辨率,通过平台的直线运动在航迹向形成长的合成直线孔径,从而获得高方位分辨率,最终生成距离-多普勒像。SAR三维成像是指通过发射宽带信号、形成合成孔径或实孔径等方式获取被观测对象在三维波数空间中的三维频率信息。典型的成像模式有多基线SAR、阵列下视SAR、圆迹SAR。其中,多基线SAR在高的系统资源需求下,存在高程向高旁瓣和模糊的问题,为此引入的稀疏重构算法又会带来计算复杂度高的问题;阵列下视SAR的俯仰向分辨率受阵列孔径限制,难以获得高的俯仰向分辨率;圆迹SAR在高频段运动补偿难度高,分辨能力受目标特性影响,基于圆迹SAR的多基线圆迹SAR的系统构成复杂度较高[13]。而不同模态对应的涡旋电磁波正交,且在运动平台体制下,具有与航迹向、切向航迹向耦合的方位角维分辨能力,因此具有三维成像的能力。基于涡旋电磁波的SAR成像在不带来高的系统复杂度的条件下可实现对目标的三维空间重构。
传统条带SAR的方位向分辨率取决于天线的方位向孔径,为利用电磁涡旋波环状发散波束的特点,中国科学院空天信息创新研究院微波成像技术国家级重点实验室的陈龙永等人[12]将电磁涡旋波与SAR成像机制相结合,实现了高于传统条带SAR的方位分辨率。基于此,杜永兴等人[14]利用改进后的后向投影算法(Back Projection,BP)实现了多模态电磁涡旋波SAR成像。文献[15]在不改变天线孔径的条件下利用电磁涡旋波降低脉冲重复频率,从而提升方位分辨率。
而在三维成像方面,国防科技大学的刘康等人[16]利用基于对OAM模态进行FFT之后方位角域运动轨迹的参数估计提取目标的切向航迹向的坐标,此外分析得到切向航迹向的分辨率由模态谱、天线孔径、初始方位角联合决定。文献[17]基于干涉合成孔径雷达(Interferometric Synthetic Aperture Radar,InSAR)的概念提出了基于电磁涡旋波的InSAR,在单载体平台航迹的条件下有效提取了目标的三维信息。现有研究未考虑涡旋方位角域的分辨能力与航迹向、切向航迹向的耦合关系。
基于此,本文提出了一种基于联合二维方位(SAR方位-涡旋方位角)压缩算法的电磁涡旋SAR三维成像算法,可实现对目标的高精度三维信息获取。本文的其余内容组织如下:第2节介绍了EMVSAR的系统框架和信号模型;第3节阐述和推导了所提出的EMV-SAR三维成像算法;第4节进行了仿真实验,并对成像结果进行了分析和比较;第5节对全文进行总结。
2 EMV-SAR系统和信号模型
目前涡旋电磁波的产生方式有4类,分别是单一微带贴片天线、行波天线、阵列天线和超表面天线。为满足成像所需的同时多模态的需求,本文采用最常用的(Uniform Circular Array,UCA)天线作为雷达涡旋信号发射装置,且采用多发单收模式。
2.1 EMV-SAR系统构型
本文提出的三维EMV-SAR成像算法是传统条带SAR成像系统的扩展。如图1所示,建立UCA多发单收的EMV-SAR成像模型,采用半径为a且阵元数量为N的UCA发射不同模态的涡旋电磁波,同时采用单个接收天线接收目标反射的回波。建立以三维成像区域中心为坐标原点的笛卡尔坐标系O-xyz,其中平面xOy表示水平面,z轴垂直于xOy平面向下,表示高度方向,图1中浅灰色成像区域为与涡旋波束宽度相关的长方体成像区域,黑色圆点表示本文试验所涉及的8个成像点。雷达以速度v沿平行于对应慢时间µ的y轴正向的方向移动,飞行高度为H,与成像区域中心的水平距离为xR。雷达位置(即UCA相位中心的位置)坐标可表示为

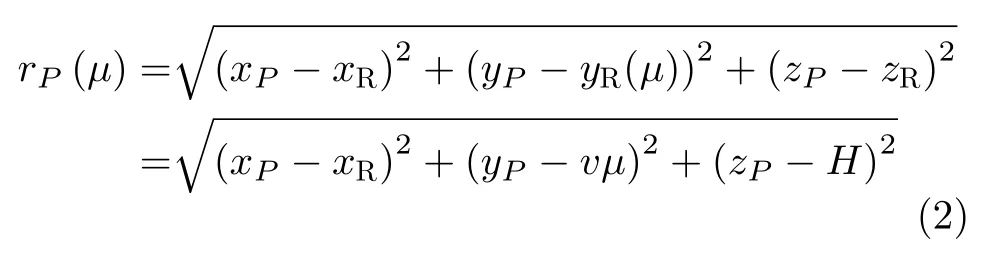
为避免涡旋方位角和径向距离的耦合,将UCA法线指向平行于x轴正向的方向。雷达接收端配备单个天线,位于UCA的中心,如图1所示。假设点P(xP,yP,zP)位于成像区域内,忽略不同阵元与目标间的距离,将UCA等效为位于阵列圆心的等效相位中心处理,雷达与目标间的距离可表示为
目标相对于雷达平台的俯仰角和方位角均随慢时间变化,可表示为
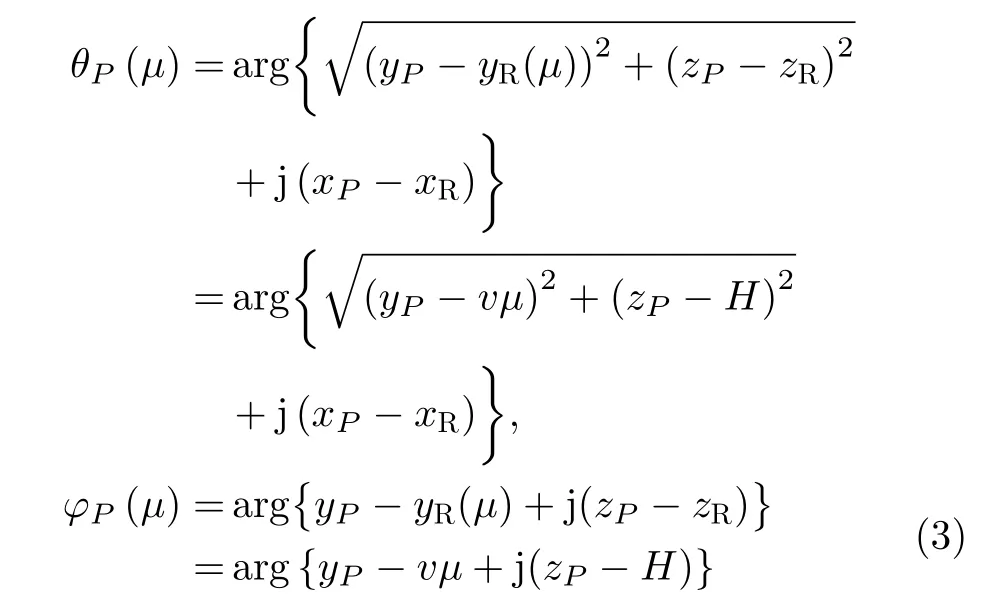
这里的a rg(·)为计算复数的辐角。
2.2 EMV-SAR信号模型
传统SAR成像系统可获得xOy平面对应的距离、航迹向二维信息,无法获得z轴对应高度向信息。涡旋电磁波可以提供距离和高度耦合在一起的方位角信息。通过发射涡旋电磁波得到的方位角信息和距离信息,可解耦合得到z轴高度向信息,前提是实现多个模态对应涡旋电磁波照射同一观测场景。为了获取同一成像场景中不同OAM模态的信息,必须同时发射不同涡旋模态的信号。采用UCA发射涡旋电磁波时,当在特定模态下产生稳定的轨道角动量,即产生时不变波束图时,常用的方法是将所有阵元视为一个整体,不同阵元发射相干信号。在这种信号机制下,当多个模态的涡旋场叠加在一起时,不同OAM模式的信号是相干的,使得所有模态的信号很难被分离,OAM模态间的正交性很难被有效利用。
为此,本文引入在时空域中的正交波形来实现模态间的去相关。文献[18]提出了两种具体实现方式:一种是对于特定的模态,不同阵元发射不同正交波形wn,共有N组正交波形构成正交波形集WS,经过目标照射后,在接收端实现通道分离后,对每个通道的信号附加模态相关的梯度相位{exp(jl2πn/N),n=1,2,...,N}后做相干积累,产生对应模态信号;另一种是对于特定的模态,不同的阵元发射不同正交,且附加OAM模态l相关的梯度初始相位,不同模态采用不同的正交发射波形,每个阵元实际发射的信号是由其所有涉及模态对应波形的线性组合。本文为了简化模型,采用第1种方案。UCA每个阵元发射调制在载频上的具有归一化恒定幅度的相位编码信号wn(t),重复周期为Tc,可得
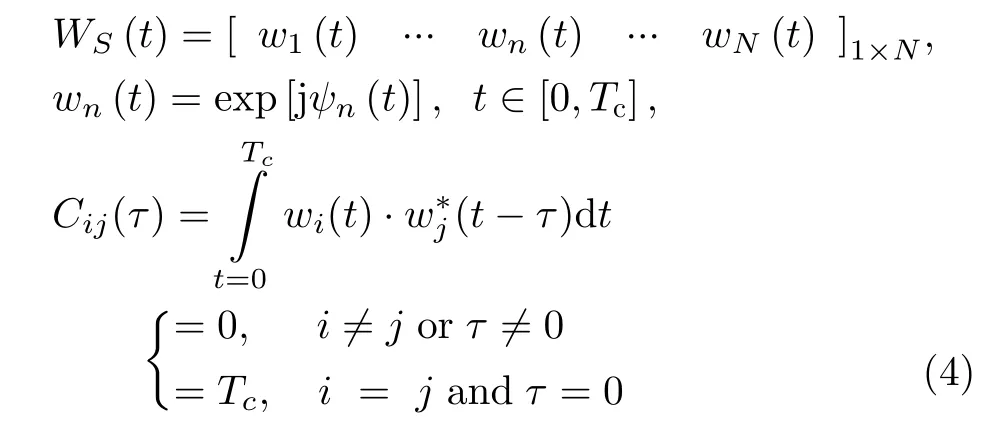
其中,Cij(τ)表示正交波形集中wi和wj的相关函数,理想的正交波形只有在波形无时延时的自相关函数不为零,τ表示两个波形的相对时延。引入正交波形后,距离为r、方位角为φ且俯仰角为θ处的合成瞬时电场强度可表示为
其中,τn=|r-rn|/c表示从第n个阵元到(r,φ,θ)的场传播时延,c表示光速,F(φ,θ)表示单个阵元的方向图。N个阵元合成的瞬时辐射场表现为时空随机性,所有阵元的辐射相位在时域中都是随机或伪随机的。瞬时场能量密度为
其中,ε0为真空中的介电常数,为电场能量密度,即单个阵元的发射波束模式。式(6)中第3行右项描述了辐射场的随机性。通过瞬时场能量密度积分可得到一个波形周期内的平均能量密度,平均能量分布与单个阵元的能量分布成正比,其大小为单个阵元的能量分布乘以阵元的数量。

通过空间随机场的非相干积累,随机性转化为一致性,并且积累后的能量分布与单天线的能量分布一致。
为计算回波信号,首先对阵元维的信号相干叠加,r处模态l对应的回波信号为
其中,λ为波长。假设雷达在一个脉冲内是静止的(停走停模型)。观测场景中散射点反射的回波信号为
其中,σm和rm(µ)分别为第m个散射点的后向散射系数和瞬时位置,wa(µ)为方位包络信号,µc为波束中心偏离时间。
3 EMV-SAR三维成像算法
对于回波信号,首先通过波形分集实现模态分离。分离后EMV-SAR信号包括快时间、涡旋模态和慢时间3个维度。对于传统的SAR二维信号,在整个成像算法中,所有慢时间序列对应的都是距离剖面。而对于EMV-SAR信号,慢时间序列对应的二维矩阵是距离和涡旋模态平面上的二维图像。本文提出的EMV-SAR成像处理算法基于距离多普勒(RD)算法。其核心机制是在方位压缩中引入拉东傅里叶变换(Radon Fourier Transform,RFT),实现涡旋方位角域和SAR方位域二维联合方位域压缩。EMV-SAR信号处理框如图2所示。

图2 EMV-SAR 信号处理流程Fig.2 EMV-SAR 3D imaging processing algorithm
3.1 多模态信号分离
在最初接收到的二维信号中,不同正交波形混叠在一起。基于波形分集,通过波形匹配实现通道分离。
其中,conj(·)表示取共轭,wr(t)=Cnn(t),n=1,2,...,N为不同正交波形的自相关函数对应的距离向包络。对通道分离后的数据附加模态相关的等梯度相位,合成不同模态的信号。
其中,φm(µ)和θm(µ)分别为第m个散射点的方位角和俯仰角,k=2π/λ为波数,e xp[jlφm(µ)]为目标方位角相关的涡旋相位调制,Jl(ka·sinθ)为l阶第1类贝塞尔函数,表示不同涡旋模态对应的方向图。涡旋场分布使得电磁能量不收敛,其方向图在距离切面上为存在中心空洞的环状。
雷达同时发射多模态信号,在接收信号中不同模态信号混叠在一起。与传统的SAR回波信号相比,此时的回波信号增加了模态信息。此外,由于涡旋电磁波的方向图为发散的环状波束,因此,方位向包络不再是sinc平方型,而是由波数、阵列半径和俯仰角决定的第1类贝塞尔函数形式。涡旋场的相位分布随着模态数的变化而变化,不同模态方向图发散角不同。因此首先需要在OAM模态域进行方向图补偿,以获得方位角域的分辨率。
3.2 联合二维方位压缩算法
本文采用的联合二维方位压缩算法是将距离压缩后的信号在方位角维和SAR方位维上进行联合压缩处理。在笛卡尔坐标下,对最后的三维图像进行网格划分,x维、y维、z维分别代表着距离、SAR方位、高度。距离-慢时间-模态三维信号在模态域进行FFT之后转换到距离-慢时间-方位角域。在SAR成像算法中,慢时间对应的即为y维,而距离维对应最短斜距,是与x坐标、z坐标耦合在一起的,而方位角表示目标在yOz平面内的方位角,所以三者是耦合在一起的,但通过y坐标与方位角可计算高度信息,即z坐标,之后通过距离上解耦合可解算出x坐标。所以距离-慢时间-方位角3个空间未知参量包含目标的三维信息,可准确表述三维空间中的位置坐标。
EMV-SAR三维成像算法的总体思路是先将回波信号从涡旋模态域变换到涡旋方位角域,接着对所有距离高度网格点对应的SAR方位维信号进行RFT。具体实现过程如下。对涡旋模态域的信号进行FFT。在变换过程中,需要对不同模态下不同的信号发射方式带来的影响进行补偿。不同模态下的涡旋方向图与俯仰角有关(对应涡旋波的发散角)。
对不同模态下的回波信号进行涡旋方向图补偿后也就是对涡旋模态下的信号进行FFT后的输出信号可以表示为
其中,[ka·sinθm]为Jl[ka·sinθm]的补偿因子,wφ(φ)是涡旋方位角域sinc型包络函数。相比于传统的SAR处理,EMV-SAR架构下的相位调制提供了目标涡旋方位角维的新息。在传统的SAR信号处理中,对点目标的距离观测过程是距离-慢时间平面上的一条曲线;而在EMV-SAR架构下,这条曲线位于由涡旋方位角、距离、慢时间构成的三维空间中,其在距离维的投影长度与在传统SAR处理中的距离维的投影长度相同。因此,参考经典的频域算法对所有方位角对应的距离-慢时间维的信号进行距离单元徙动校正(RCMC)。校正完成后,单个散射点的回波信号将位于一个距离单元的同一切面上,表现为一条随着慢时间域变化的涡旋方位角曲线。在SAR方位向,通过RFT对涡旋方位角对应相位进行补偿
最后,在SAR方位域进行压缩,即可得到三维成像结果。
4 仿真
在本节中,为了验证所提出的算法对三维目标重构中具有成像能力,采用点目标为例,对EMVSAR三维成像进行了仿真实验。
4.1 方位角维成像实验
为了验证所提出的EMV-SAR系统在涡旋方位角维的成像能力,本文对立方体的8个顶点进行了仿真实验。表1为具体的实验参数,表2为点目标理论参数和实验结果。
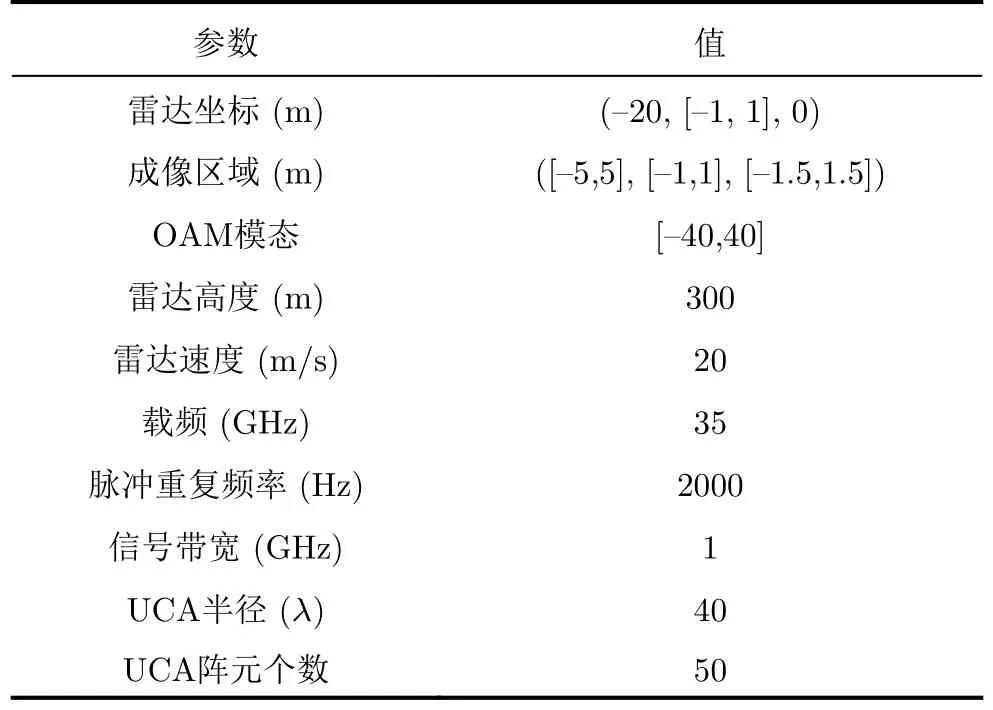
表1 仿真涉及雷达参数Tab.1 Simulation Radar parameters
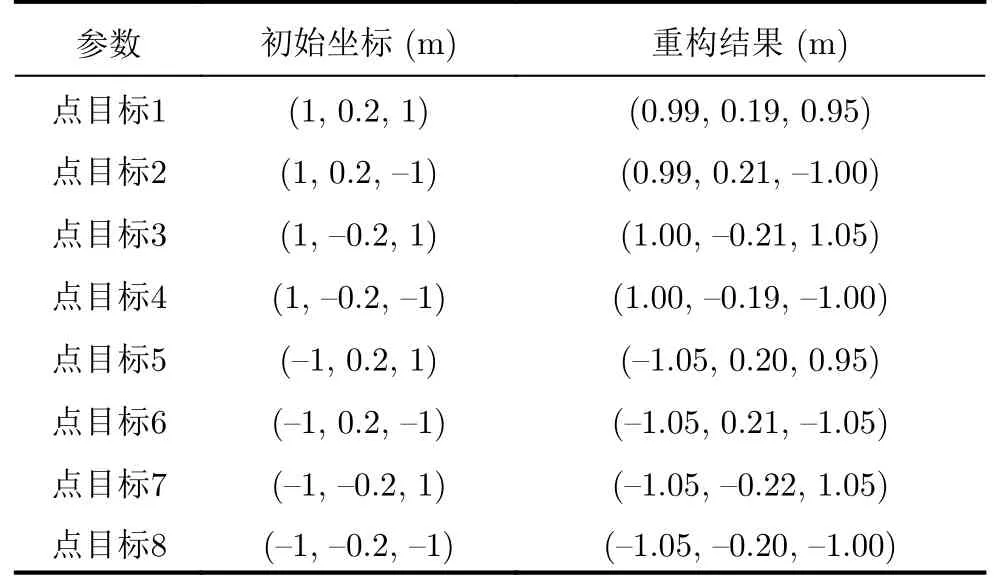
表2 点目标理论坐标与仿真坐标Tab.2 Theoretical coordinates and simulation coordinates of point targets
雷达发射端UCA各发射阵元采用不同正交波形照射目标,接收天线接收到反射回波后附加涡旋相位合成不同模态对应的回波信号。为了实现涡旋方位角域的成像,通过FFT将距离维压缩信号从模态域变换为涡旋方位角域。图3为这8个点目标的SAR方位向-涡旋方位角曲线和距离向-涡旋方位角曲线。在一个SAR慢时间采样点上,点目标与雷达可视为相对静止,方位角不发生变化;在不同的SAR慢时间采样点,点目标的方位角发生变化。通过模态域的相干积累,实现了涡旋方位角维的成像。
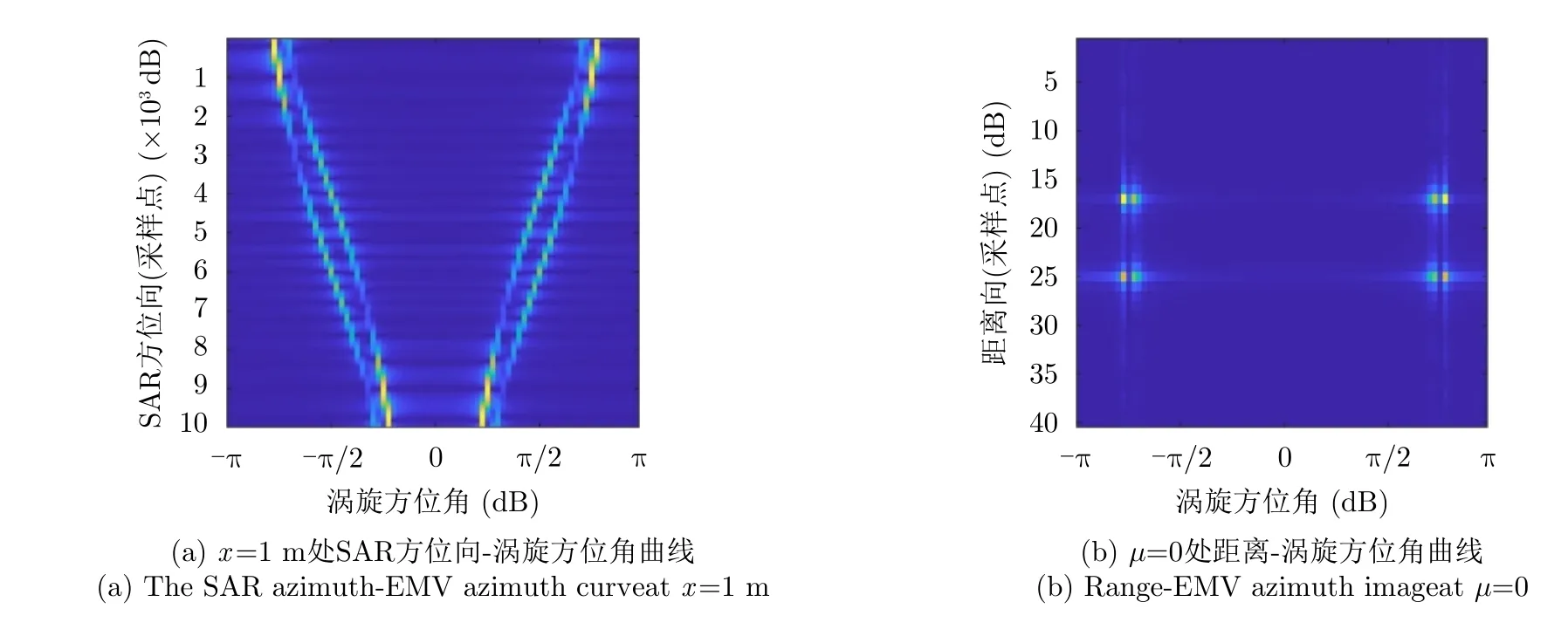
图3 涡旋方位角域成像结果Fig.3 The imaging result of EMV azimuth domain
4.2 EMV-SAR成像实验
对8个点目标的3D重构结果如图4所示,表2为每个点目标的重构坐标。利用涡旋波携带有轨道角动量的特性,通过对涡旋域的信号进行FFT可得到涡旋方位角域的成像结果。取出不同维度的信号,观察二维和一维成像结果。图5为不同二维平面上的成像结果,图6为不同维度的成像结果。由成像结果可以看出,本文提出的EMV-SAR算法实现了静止多点目标的三维重建。高度维和涡旋方位角维不是线性对应关系,因此高度维的分辨率不能直接等同分析,其与距离、涡旋方位角分辨率相关。此外,由于涡旋方向图的限制,中心区域较难进行成像。
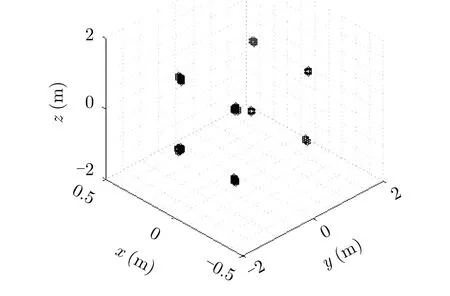
图4 点目标三维重建结果Fig.4 Point target 3D reconstruction result
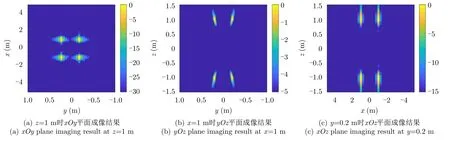
图5 点目标不同切面成像结果Fig.5 Point target imaging results of different slices

图6 点目标不同维度成像结果Fig.6 Point target imaging results in different dimensions
5 总结
本文基于传统的条带SAR机制,结合涡旋电磁波在方位角维具有分辨能力的特性,对EMV-SAR系统在三维成像方面的能力展开研究。本文所提出的EMV-SAR成像系统可实现对目标的高精度三维成像。首先,建立了EMV-SAR成像坐标系和模型,分析了目标和雷达的相对位置关系。采用UCA发射正交波形,在接收端基于波形分集实现通道分离后,通过附加涡旋相位合成不同模态的涡旋回波信号,得到距离、SAR方位、模态三维信号。将信号在OAM模态域进行FFT实现方位角域的成像。其次,考虑到在本文所建立的成像模型下方位角维度是距离维和高度维耦合在一起的维度,本文提出了联合二维方位压缩算法,将距离压缩后的信号在方位角维和SAR方位维上进行联合压缩。最后,通过仿真实验对EMV-SAR系统的成像能力展开研究,考虑到贝塞尔函数形式的涡旋方向图,以位于立方体定点的8个点目标为例,进行了三维成像实验,重构了8个点目标的三维坐标。目前涡旋电磁波应用的限制为发散的贝塞尔函数形式的方向图。面向实际应用,未来研究工作应重点关注EMV-SAR三维成像系统中方向图因子补偿算法和分辨率分析,在不降低距离维和SAR方位维分辨能力的前提下,研究方向图因子补偿算法,提高高度维的分辨能力,提升EMV-SAR系统的探测距离。