基于UWB和视觉信息的吊装作业安全管控系统
2021-11-06何勇军罗荣钧尹习伟刘英男
张 斌,何勇军,程 剑,罗荣钧,王 钦,尹习伟,刘英男
(1.国网山东省电力公司建设公司,山东济南 250001;2.国网山东省电力公司,山东济南,250001;3.山东大学电气工程学院,山东济南 250061)
0 引言
近几年电力施工吊车作业队伍和工程量不断扩大[1-3]。吊车司机很难根据肉眼目测来判断吊车臂与带电设备间距离,往往因距离较近而未及时停止吊车臂而引发人身安全和大范围停电事故,国内外公司已研制相关的吊车防碰撞系统并应用于实际工程[4]:法国SMIE公司采用仿真建模技术还原吊车施工现场,吊车操作者可实时观察吊车动态;德国西门子公司利用超声波技术测量吊车与障碍物距离,采用碰撞预警算法实现吊车防碰撞;美国CRANE公司采用无线监视系统预防吊车碰撞。上述系统结构复杂、成本较高、兼容性较差,无法适用于特高压变电站吊装作业场景。文献[5-8]提出测量工频电场进行安全距离预警的方法,特高压变电站电力设备所发出的工频电场是一种频率为50 Hz的交变准静态电场,在实际应用过程中,工频电场测量结果受到运行工况和多设备产生电场叠加影响,导致测量结果不准确,产生误报漏报。UWB(ultra wide band)超宽带测距技术广泛应用在室内定位,而在特高压变电站设备密集遮挡严重的室外场合,会导致UWB信号穿透力不足,大大降低测距精度[9]。
为解决特高压变电站建设过程中对吊车吊臂距离探测和工频电场测量存在误差的问题,本文基于UWB和视觉信息,设计了一种特高压变电站吊装作业安全预警系统,实时采集吊车和吊臂位置,实现吊车作业过程中的全方位安全管控。
1 总体方案
基于UWB和视觉信息的吊装作业安全管控系统架构如图1所示,系统由现场探测单元和站级管控系统组成。现场探测单元包括视觉探测模块、UWB定位标签、UWB定位基站,其中视觉探测模块采用双目立体摄像机,采集的吊车图像通过WiFi网桥传输至站级管控系统;UWB定位标签包括UWB模块DWM1000、控制芯片STM32F411CE和WiFi网桥,负责吊车吊臂距离探测和上传;UWB定位基站包括UWB模块DWM1000和控制芯片STM32F411CE,负责提供位置基准和发射UWB信号。站级管控系统由WiFi基站和站级服务器组成,现场探测单元采集的UWB定位信息和吊车视觉信息通过WiFi信号传输至站站级服务器,站级服务器搭载变电站设备3D模型,根据变电站设备3D模型计算吊车位置和吊臂位置,并计算吊臂与带电设备之间距离。
2 硬件设计
本系统主要设计了UWB定位标签和基站的硬件电路,主要包括STM32F411CE硬件最小系统、UWB定位芯片DWM1000硬件最小系统、供电电路等3个部分。
2.1 STM32F411CE硬件最小系统设计
STM32F411CE是一款基于Cortex-M4内核的CPU,拥有512K字节的片内ROM存储器,128 K字节的RAM存储器,最高工作频率100 MHz,1个SDIO接口,可以实现与802.11b网络协议的WiFi设备进行通信。其硬件最小系统如图2所示。
2.2 UWB定位芯片DWM1000硬件最小系统
本文采用Decawave公司所生产的射频收发芯片DWM1000作为核心,在此基础上设计UWB基站和移动标签的电路。DWM1000与STM32F411CE通过SPI接口通信。DWM1000硬件最小系统如图3所示。
2.3 供电电路
本系统采用锂电池供电,锂电池输出接入SP6205电源转换芯片,电源电路如图4所示。SP6205是200 kHz固定开关频率PWM直流降压转换器,转换器输入电压在5~80 V范围内,输出0.5 A连续电流,内建频率补偿和固定频率振荡器。PWM控制电路可以将占空比从0~100%线性调整。具有EN功能,过流保护功能,在输出短路保护情况下,开关频率可从200 kHz降至45 kHz,保证电源系统的工作稳定性。
3 基于UWB和视觉信息的位置计算
特高压变电站现场设备多、体积大,不易安装UWB定位基站,本文将定位基站和标签安装在吊车上,结合视觉技术定位吊车位置,并将该位置映射到变电站3D模型中,从而获取实时吊装设备空间坐标和带电设备之间的距离。
3.1 UWB测距计算
根据汽车吊的设置,UWB的3个定位基站分别部署在汽车驾驶室左右两侧以及吊车驾驶室的前方固定位置,3个基站距离地面高度一致均为h1,标签强磁吸附在吊钩上,部署方式如图5所示。
其中,以定位基站A为坐标原点,标签i映射到基站平面坐标系的坐标为(xi,yi),基站A坐标为(0,0)、基站B坐标为(0,yB)、基站C坐标为(xc,0)标签到基站坐标平面高度为h。
dA2=xi2+yi2+h2
(1)
dB2=xi2+(yB-yi)2+h2
(2)
dC2=(xC-xi)2+yi2+h2
(3)
由式(1)~式(3)求解标签i的坐标(xi,yi)及标签所处高度h。
3.2 基于视觉位置的吊车位置计算
在特高压变电站,固定安装视觉探测模块,监控范围覆盖整个变电站。当吊车进入并停止在施工区域,双目摄像头开始采集吊车图像,两个摄像头位置不同,吊车目标点的采集的左右图像中的成像点必然存在一定的像素差,即视差[9]。根据相似三角形测距原理,即可由算法提取对应点视差值计算吊车对双目相机的深度距离。
如图6所示,双目摄像机左右光轴互相平行,成像平面处于同一平面上,光心到成像平面距离即摄像机的焦距为d1,左右光心之间平移距离为两摄像机之间的极限距离d2,空间中吊车目标投影到左右相平面成像点上,d3和d4分别是吊机投影到左右像平面成像点和成像平面主点之间距离,d是吊机到双目摄像机之间的距离,由距离可获取吊车坐标,并将该坐标录入到变电站3D模型中。
由参考文献[10]可得d的计算公式:
(4)
3.3 预警计算
吊车在吊装作业过程中,会不断移动,本文采用碰撞时间(time to collision,TTC)作为吊车吊装作业安全的评估指标[10-13]。根据连续2个时刻内标签相对位置的变化计算出吊车吊臂移动速度v,通过测出的距离值,计算得到TTC值来评估吊车与带电设备的碰撞风险。
吊车运动过程中,会有水平方向和垂直方向碰撞带电设备的风险,分别计算水平方向和垂直方向TTC,标签由A移动到B点轨迹如图8所示,计算公式如式(5)所示。
(5)
式中:v为吊车运动速度;Δt为连续2时刻间的时间间隔,即检测系统更新吊车位置的时间间隔;θ为吊车运动速度方向与水平方向间的夹角;d水平、d垂直为吊车标签距离水平方向和垂直方向带电设备的间距。
当计算出的水平和垂直TTC值达到安全阈值时,判定此时吊车超越安全距离,有触电风险。
为了将UWB定位及视觉检测吊车位置相融合,建立世界坐标系,将UWB定位结果与视觉检测的吊车位置分别转换到世界坐标系中,如图9所示,设置主控楼为世界坐标系原点,摄像头在世界坐标系位置已知,通过视觉技术获取吊车与摄像头的距离,可确定吊车处于世界坐标系的具体位置,将UWB测量定位的坐标进行转换。
4 系统软件设计
站级服务器获取吊车吊装位置,通过实时坐标转换,站级服务器根据3D设备模型各个带电设备位置坐标,计算吊装设备距离带电设备之间的水平和垂直方向距离,计算水平和垂直方向的碰撞时间,判断TTC是否达到安全阈值,超过阈值进行触电预警,系统流程如图10所示。
5 系统测试
本系统应用在某1 000 kV特高压变电站,吊装标签安装位置如图11所示,摄像头拍摄吊车图像如图12所示。
DWM1000测距理论精度小于5 cm,测距范围100 m。摄像机采用双目立体摄像机,镜头焦距4 mm,两镜头距离160 mm,测距范围50 m。现场测试误差结果如表1和表2所示。
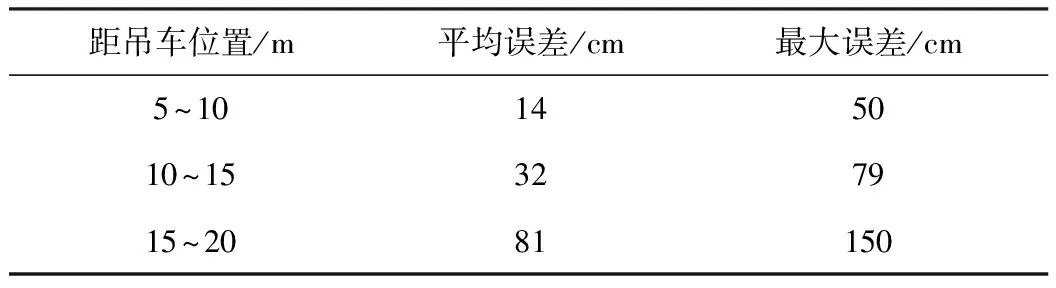
表1 视觉测距误差

表2 UWB定位误差
根据测量结果可知:
(1)在双目摄像头距离吊车20 m以内,测距平均误差在81 cm以内,满足吊车定位精度;
(2)在吊车移动速度小于7 m/h时,UWB测距平均误差11 cm以内,满足吊装定位精度要求。
在1 000 kV主变区域吊装时,当吊装设备移动在1 000 kV避雷器周围时,超过碰撞时间阈值,吊装预警,预警结果如图13所示。
6 结束语
开发了一种融合UWB和视觉信息的特高压变电站吊装作业安全预警系统。现场应用结果表明,本系统能够用来检测吊车所处变电站位置和吊装位置,并提高吊车吊装碰撞预警系统的可靠性。UWB定位技术广泛应用在室内定位,本文将UWB基站和标签与吊车车身结合,减少了变电站设备遮挡,提高了UWB测距精度和可移植性,为UWB技术在电力安全生产应用中提供了一种新的思路。
