面向对象结合卷积神经网络的GF-1影像遥感分类
2021-11-06蒋治浩张怀清蒋馥根
蒋治浩,林 辉,张怀清,蒋馥根
(1.中南林业科技大学 a.林业遥感信息工程研究中心;b.林业遥感大数据与生态安全湖南省重点实验室;c.南方森林资源经营与监测国家林业与草原局重点实验室,湖南 长沙 410004;2.中国林业科学研究院资源信息研究所,北京 100091)
遥感和对地观测技术是一个国家综合国力的重要体现,是非常具有发展潜力的战略性技术领域。遥感影像分类,是目前遥感影像处理的研究热点之一[1-2]。传统的影像分类多是基于像元的,即研究的对象为单个像元,对空间分辨率低于10米的多光谱影像来说,分类效果一般较好[3]。随着遥感技术的高速发展,越来越多高分辨率卫星投入使用,基于像元的传统分类方法难以满足实际应用,原因是遥感影像存在“同物异谱”,以及“异物同谱”的特点,而高分辨率影像的光谱分辨率往往较低,因此,若是不考虑邻近的纹理、形状、结构等信息,只利用局部像元的光谱特征,在分类的过程中,会出现单个像元的漏分、错分的情况,导致分类精度低[4-7],如何高效地利用高分辨率遥感影像就成为了当下的重点与难点[8-9]。因此,面向对象(Object-based image analysis,OBIA)的方法应运而生,它能够充分利用影像的光谱特征,以及几何特征和结构特征,研究目标的最小单元变成了具有相似特征的对象,进而进行其他的影像分析。和晓风等[10]采用面向对象的决策树对东洞庭湖区域进行分类得到基于面向对象决策树遥感分类方法无论是总体精度还是个地类精度均较传统基于像元方法更高。Xun 等[11]将基于像元的SVM 分类法,面向对象的SVM 分类法,面向对象的最邻近法进行对比,得到面向对象的SVM 分类法在结合了对象的光谱、几何、纹理等特征后,具有的最高的分类精度。谭衢霖等[12]利用面向对象的方法对城区的植被覆盖进行估测,并利用基于像元的方法进行对比,结果表明,面向对象的方法的分类精度显著高于基于像元的方法。上述研究都证明面向对象是一种很有研究价值的方法。
在改进研究目标的最小单元时,传统的分类方法也亟待优化。深度学习的出现,突破了当前传统方法的局限。卷积神经网络(Convolutional neural network,CNN)[13-14],作为深度学习的代表,是一种起源于模拟人类大脑神经元的结构和功能而建立的具有卷积核的人工神经网络。经过研究发现,其性能远高于传统的机器学习模型[15]。徐珊珊等[16]利用卷积神经网络对木材缺陷进行识别,得到结论为该算法能显著降低识别耗时,克服了传统模型的诸多缺点。Fan 等[17]利用卷积神经网络提取遥感影像的特征,输入分类器中,对WHU-RS 和US-Merced 数据集进行分类研究,得到精度达到了96.8%。高常鑫等[18]将分层法与深度学习算法相结合,对高分辨率遥感影像进行高精度目标检测。
因此本研究将面向对象影像分析技术与卷积神经网络结合,基于GF-1 遥感影像利用大量样本数据,对遥感影像进行分割,提取光谱、几何、纹理等特征,构建一维卷积神经网络(1D-CNN)模型进行遥感影像的分类,并建立基于像元的SVM,以及面向对象的SVM 分类模型进行对比,最后利用混淆矩阵的方法对各种方法进行精度评价。
1 材料与方法
1.1 研究区概况
研究区为杭州市西湖区,位于杭州老城区的西部,总面积312.43 km2,坐标120°04′~120°10′E,30°10′~30°16′N。东以莫干山路、环城西路、西湖、万松岭、将台山、玉皇山、与拱墅区、下城区、上城区为界;东南濒钱塘江与滨江区、萧山区隔江相望;西北与余杭区毗邻;西南以如意尖、午潮山等山脉与富阳区相接。东西最大距离17.54 km,南北最大距离30.88 km。研究区位置图见图1。
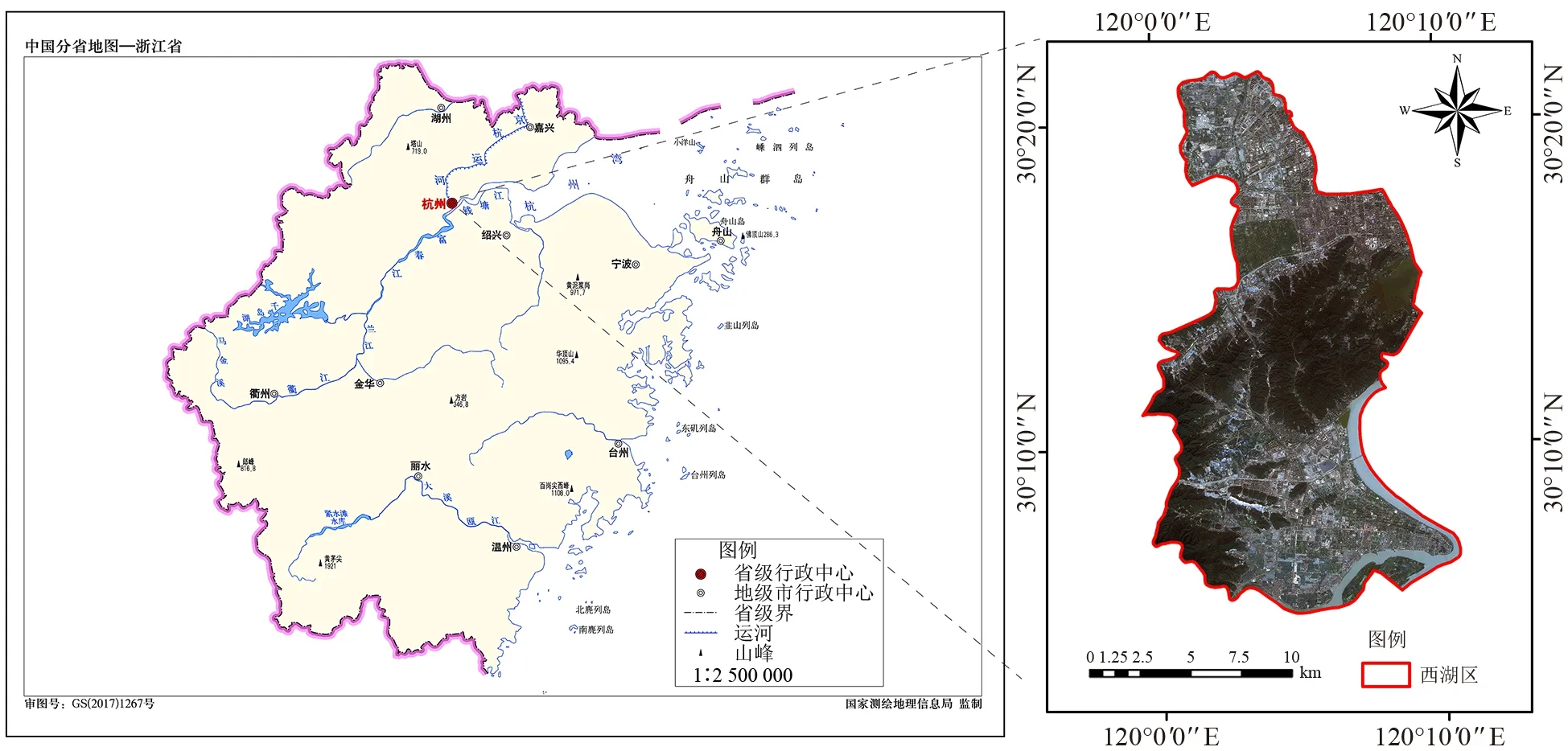
图1 研究区位置Fig.1 The location of study area
1.2 数据收集与预处理
1.2.1 遥感影像概况
研究采用的遥感数据源为“高分一号”(GF-1)国产卫星影像。GF-1 卫星搭载了2 台空间分辨率分别为2 m 和8 m 相机,以及4 台16 m 分辨率多光谱相机。研究使用了研究区内2019年10月30日采集的两景GF-1 数据,数据含云量低,质量较好。对影像进行辐射校正,大气校正,正射校正,影像融合,影像镶嵌与裁剪等预处理。
1.2.2 分类体系
本研究参考联合国粮农组织提出的土地覆盖分类体系(Land cover classification system,LCCS)和中科院资源环境数据库土地分类利用系统[19],同时结合研究区的地形地貌,气候特征等信息,以及GF-1 影像的特点,建立了杭州市西湖区的遥感分类体系,划分为6 类:林地、耕地、建筑用地、交通用地、水域以及未利用地。
1.2.3 分类特征
不同地类具有不同的光谱、形状和纹理特征[20],遥感影像经过多尺度分割后,对象内部一般为同一地类,在特征上具有一定的一致性,并且能在一定程度上与其他不同的地类区别开来,这些特征成为了遥感影像分类的主要依据[21]。对象特征主要包括光谱特征、几何特征、纹理特征和自定义特征等[22]。本研究选择的分类特征如表1所示,其中光谱特征包括均值、标准差、亮度和比率,纹理特征包括同质性、对比度、相异性、均值、方差、熵、角二阶距、相关性,几何特征包括面积、不对称性、边界指数、周长、紧致度、密度、长度、长宽比、圆度、形状指数和宽度,自定义特包括建筑面积指数、裸地指数、差值植被指数、土壤指数、归一化植被指数、水体指数。另外,还包括各波段的灰度值,共计62 个特征。

表1 特征类别Table 1 Feature type
光谱特征反映了影像的光谱信息,是对分割对象中像元的灰度值的统计。光谱特征是地物识别最重要也是最直接的特征。例如,道路房屋等具有较高的反射率,它们的亮度值通常较高,而耕地上植被覆盖较低,通常裸露的土地占比较大,因此其在光谱值上与林地具有差异性,水域在光谱特征上也具有较高的可分性。几何特征也叫形状特征,用以描述对象的形状信息,反映了分割对象的几何结构。它可以通过某些特定地物的规整或不规整的形状等几何信息,在一定程度上,解决遥感影像“同物异谱,异物同谱”的现象。通常情况下,房屋为较为规则的矩形,道路河流等为长条形,林地耕地等多为块状分布,可以利用形状特征将其进行区分。纹理特征形成于某些灰度值在对象内部按照一定规律多次出现,当影像分辨率不断提高时,纹理特征就越发突出,因此利用其进行高分辨率影像的分类可以在一定程度上提高分类精度。自定义特征中对于某些特定地类具有较好的区分效果,如NDVI 可用于区分植被与非植被,水体指数可用于区分水域与非水域,在提取房屋,道路,裸地时,可以用这些自定义特征排除植被和水域的干扰。
1.3 研究方法
1.3.1 影像分割
研究采用多尺度分割,其分割参数包括分割尺度和均质因子权重。分割尺度的作用是决定是否继续合并成更大的区域,即决定分割对象的面积大小;均质因子包括光谱异质性hcolor和形状异质性hshape,形状异质性又由紧致度hcompactness和光滑度hsmooth两个参量来描述。
1)分割尺度的确定
不同的分割尺度对于影像分割的结果具有重要的影响。通常情况下,分割尺度越小,分割后的对象的面积越小,数量越多,反之亦然。但是分割尺度并不是越小,其分割效果就越好[23]。最好的图像分割结果具有以下4 条标准:1)对象内部特征较统一即同质性高;2)对象之间,在同一个特征的值上,有较大差异,即异质性高;3)对象内部简单不复杂,且没有很多小洞出现;4)对象的边界简单完整不粗糙。在遥感影像分割时,通常只用考虑第一和第二条标准即可,即对象内部同质性高,对象间异质性高。本研究采用考虑对象内同质性与对象间异质性的分割参数优选函数(Segmentation optimization function,SOF) 来评价分割结果,分别用地理探测器q统计量和全局Moran’s I 指数(MI)来表示。
当分割的各对象内部均匀,此时对象内部的方差较小,对象之间的差别较大时,则说明空间分层异质性较严重,相反则空间分层异质性较弱。这可以被用于判断分割质量的好坏。王劲峰等[24]提出了地理探测器q统计量,可以用于度量空间分层异质性。
式(1)中Yi是指像元索引为i的的光谱值,khY为对象h中像元索引为k的光谱值,是指对象h内部的均值。当对象中只有一个像元时,对象内部的同质性最高,此时q值等于1,分割尺度增大时,对象内部的同质性减小,q值随之减小。
全局Moran’s I 指数(MI)[25]是指量化某个区域一个空间自相关矩阵在平均值上与附近其他区域的相似度,它是一个展示空间对象的统计分离很好的标准,可以用来表示作为地理空间数据的固有属性的空间自相关。

式(2)中:n为分割后的对象总数,wij为空间关系权重,研究中仅对由公共边界的区域计算Moran’s I 指数,即当i和j相邻时,wij=1,则wij=0。yi为对象i的光谱平均值,为整幅影像的光谱平均值。当MI 的计算结果值越小,那么对象之间空间相关性越小,异质性也越高,即得到的分割效果较好。
由于两个指标的计量单位差异,因此,若要将同质性与异质性合并计算,则必须将两个指标转为同一尺度,进行归一化处理以获得同等效应的量纲。一般情况下,由于q值会随着分割尺度的增大而减小,当归一化后的q值为1 时,内部同质性水平最高;Moran’s I 指数也会随着分割尺度的增大而减小,当归一化后的Moran’s I 指数为0 时,对象之间的异质性水平最高。但是同时使用独立的q值和Moran’s I 来评估分割质量是不现实的,因此,本研究以F(q)为横坐标,F(MI)为纵坐标构建了一个二维空间,计算每个尺度上的[F(q),F(MI)]分割质量最好的点[1,0]之间的欧氏距离,当这个欧氏距离最小时,说明该分割尺度下的分割质量与分割质量最好的点距离最近,分割对象内部同质性和领域的异质性达到了一个平衡点,即为最佳分割尺度。

式(3)中:F(q)和F(MI)分别代表归一化的地理探测器q统计量和归一化的Moran’s I 指数。
2)均质因子的确定
根据前人的研究[26],在影像分割的过程中,当均质因子权重处于某一个范围时,分割得到的对象的最大面积保持稳定,变化浮动较小,则此范围可以被认为是最佳均质因子权重的区间。基于最大面积法,通过固定分割尺度,设置不同的光谱异质性和形状异质性权重,统计各尺度图斑的最大面积,来确定均质因子的权重范围。
1.3.2 卷积神经网络
卷积神经网络(Convolutional neural networks,CNN)在深度学习领域是最成功的算法之一,是一类包含卷积计算且具有深度结构的前馈神经网络,其采用了局部感知与权重共享的网络构建方式,可以使得神经网络模型的复杂度大大降低,所需参数量减少,泛化能力提高[27-28]。目前CNN主要包括一维卷积神经网络(1D-CNN)、二维卷积神经网络(2D-CNN)与三维卷积神经网络(3D-CNN),这些网络虽然在结构上具有不同,但其基本单元是相同的,主要由输入层,卷积层,池化层,全连接层和输出层构成,这些不同的层之间各自存在映射关系,提取输入的数据的特征,传递到下一层。完整的卷积神经网络结构如图2所示:
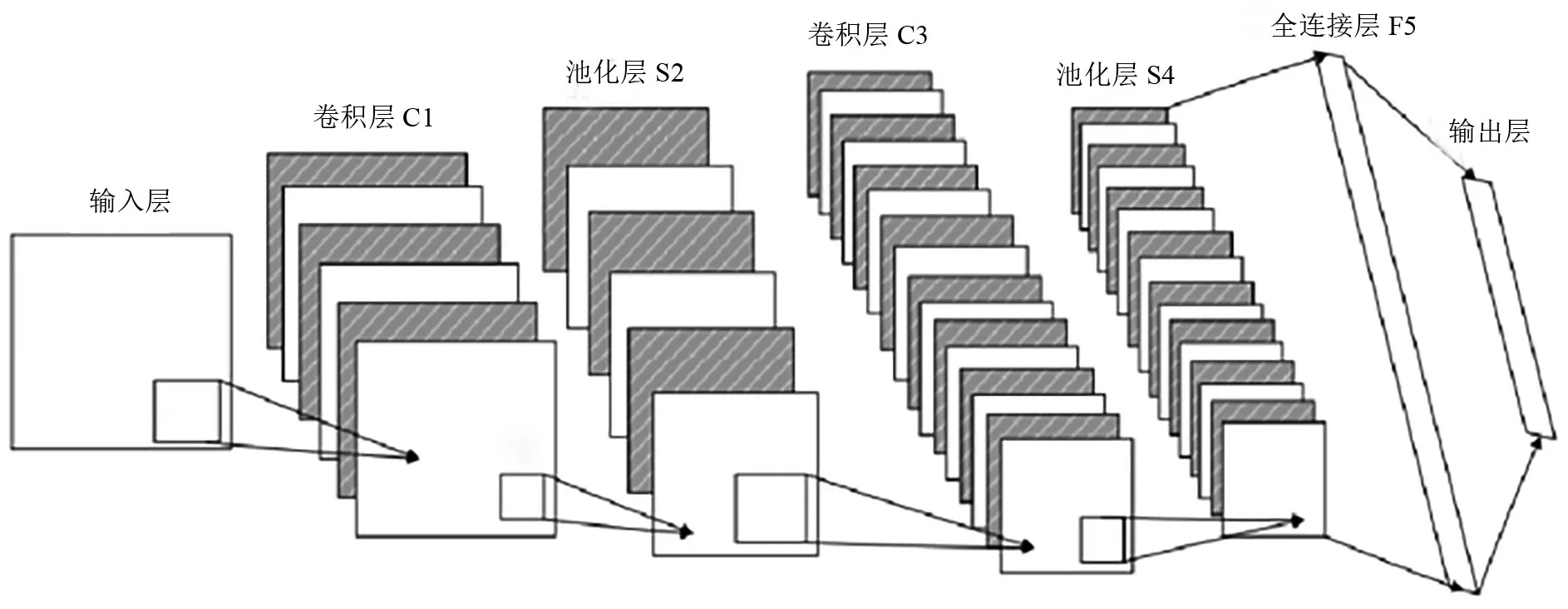
图2 CNN 的基本结构Fig.2 The basic structure of CNN
1)卷积层
卷积层(Convolutional layer)作为卷积神经网络的核心,是通过具有一定大小的卷积核与输入矩阵进行卷积运算实现特征提取的层级。卷积层需要对两类参数进行训练和优化,第一是卷积核的权重wm,n,第二是卷积层的偏置项b。令xi,j为影像中第i行,第j列的像元值,对wm,n和b以及局部感知执行卷积计算,并将结果与偏置项求和输入激活函数f(x)(通常使用sigmoid 函数,或Rectified Linear Unit ReLU 函数[29])中,得到输出特征图。其计算公式如(4):

卷积层的主要特点是局部感知与权重共享。局部感知(Receptive field)即隐含层中每个神经元不必感知上一层的全部神经元,仅对局部进行感知即可[30-32],这样便可以极大的减少权重的数目,使模型的构建更加快速。权重共享,其作用也是减少参数的数量[33]。卷积核的参数决定了特征图的参数,每一层的卷积核个数越多,参数越复杂,模型能够学习到更多的特征,但是这样容易使得网络出现过拟合,因此CNN 采用权重共享的方法,让每一张特征图只通过一个卷积核生成,实现方法是将卷积核以一定的步长在输入数据上进行滑动,对每一个局部位置进行卷积计算。
2)池化层
池化层(Pooling layer)又称降采样层,用于将卷积层之后特征图进行缩放,逐步减少表示的特征空间的尺寸,以减少神经网络中的参数数量和计算量,最终达到抑制过拟合的效果。由于卷积层为了获得不同的特征,采用了多个卷积核,获得了大量的特征图,这样增加了模型的参数,池化层的目的就是对每个特征图进行降采样,来减小特征图的维度[34]。本研究采用的最大池化法是一种非线性的下采样方法[35],实现方式是先将输入划分为若干子区域,然后计算每个子区域的最大值,并用这个最大值替换整个区域。以2 维池化为例,其池化操作的示例图(图3),以2×2 大小进行子区域划分,新的特征图将会缩放至原来的一半,从而减少参数的数量,降低网络的复杂度。

图3 最大池化计算示意图Fig.3 The diagram of max pooling operation
3)全连接层
卷积神经网络在经历了若干个卷积和池化的过程之后,要实现最终的分类任务,还需要构建全连接层,其作用:一是将多层卷积、池化后获得的特征图进行拉伸,得到特征向量;二是构建Softmax 分类器,在网络训练时计算损失误差(loss),从而进行反向传播更新网络参数。
经典网络多为2D-CNN,通常情况下2D-CNN以方矩阵为输入,如LeNet-5 的输入为32×32 的灰度图矩阵,AlexNet 的输入为227×227×3 图像矩阵,GoogleNet 的输入为224×224×3 的矩阵。而本研究采用的方法并非直接输入图像,而是将利用eCognition 提取出的特征及对应的标签输入CNN 进行训练和学习。经特征提取处理后的多光谱遥感图像特征数据维度为62 维,因此不可以转换为此类方形的矩阵作为2D-CNN 的输入数据。为此,本研究采用一维卷积构建1D-CNN 分类模型,当前1D-CNN 已经用于遥感影像分类并取得一定的效果[36-38]。
1.4 精度评价
为提高样本的准确性,研究在进行遥感影像判读后,对研究区各典型地物进行野外实地验证,结合实地验证结果与遥感判读结果,对样本信息进行修正。研究共获取了2 799 个典型样本,其中未利用地样本489 个,建筑用地样本498 个,耕地样本483 个,林地样本497 个,交通用地样本340 个,水域样本492 个,每类样本选择70%作为训练样本,30%作为验证样本,利用eCognition软件对样本进行特征提取,代入模型进行训练和验证。分类的精度评价方法选择混淆矩阵法。在混淆矩阵的基础上,可以计算得到总体精度、用户精度、生产者精度、kappa 系数等指标。
2 结果与分析
2.1 分割参数确定
研究首先固定光谱异质性和形状异质性,设置为默认值0.9 和0.1,利用eCognition 软件进行分割,确定最佳分割尺度的大致区间为50~250。以50为分割尺度的起点,以10 为间隔,至分割尺度为250 为止,对每个尺度的分割结果计算其地理探测器q统计量和Moran’s I 指数进行分析。结果如图4所示:

图4 SOF 分布图Fig.4 Distribution of SOF
由计算结果可知,随着分割尺度的上升,q统计量的值在逐渐上涨,而Moran’s I 指数得值在逐渐下降,计算SOF 值得到图四SOF 值随分割尺度的变化图,可以得到SOF 值最低处位于分割尺度为90 的地方,因此,可以得到当分割尺度为90 时,分割对象内部的同质性和分割对象之间的异质性得到了平衡,即对象内较为均匀,而相邻对象间差异较大,符合本次研究的最佳分割尺度的原则。
利用上文得到的最佳分割尺度90,固定紧致度为0.5,从0.1 开始,以0.1 为步长,统计各形状因子权重分割结果下,对象的最大面积发生的变化,再根据得到的最佳形状因子权重,设置不同的紧致度的权重,统计各个分割结果下,对象的最大面积发生的变化。
由表2~3 可以得到,当形状因子的权重处于0.6~0.8 之间的时候,对象的最大面积较为恒定,当紧致度的权重处于0.2~0.4 之间的时候,对象的最大面积较为恒定。基于此,本研究选择确定分割尺度为90,形状因子的权重为0.7,0.3作为紧致度的权重。

表2 不同形状因子下最大面积变化结果Table 2 Variation of the maximum area under different shape factors

表3 不同紧致度下最大面积变化结果Table 3 Variation of the maximum area under different compactness
2.2 卷积神经网络的构建
研究采用提取的62 个特征数据作为1D-CNN网络的输入数据,一共两层卷积,两层最大池化法池化,三层全连接,并且在前两个全连接层出使用Dropout 以防止过拟合,最后一层全连接层利用Softmax 分类器输出维度为6,对应6 种类别。网络参数如表4所示。基于TensorFlow 学习框架,利用1D-CNN 分类模型建立GF-1 遥感影像分类模型,迭代次数为5 000,学习率为0.001,梯度下降采用Adam 算法,损失函数为交叉熵,批尺寸(BatchSize)为128。
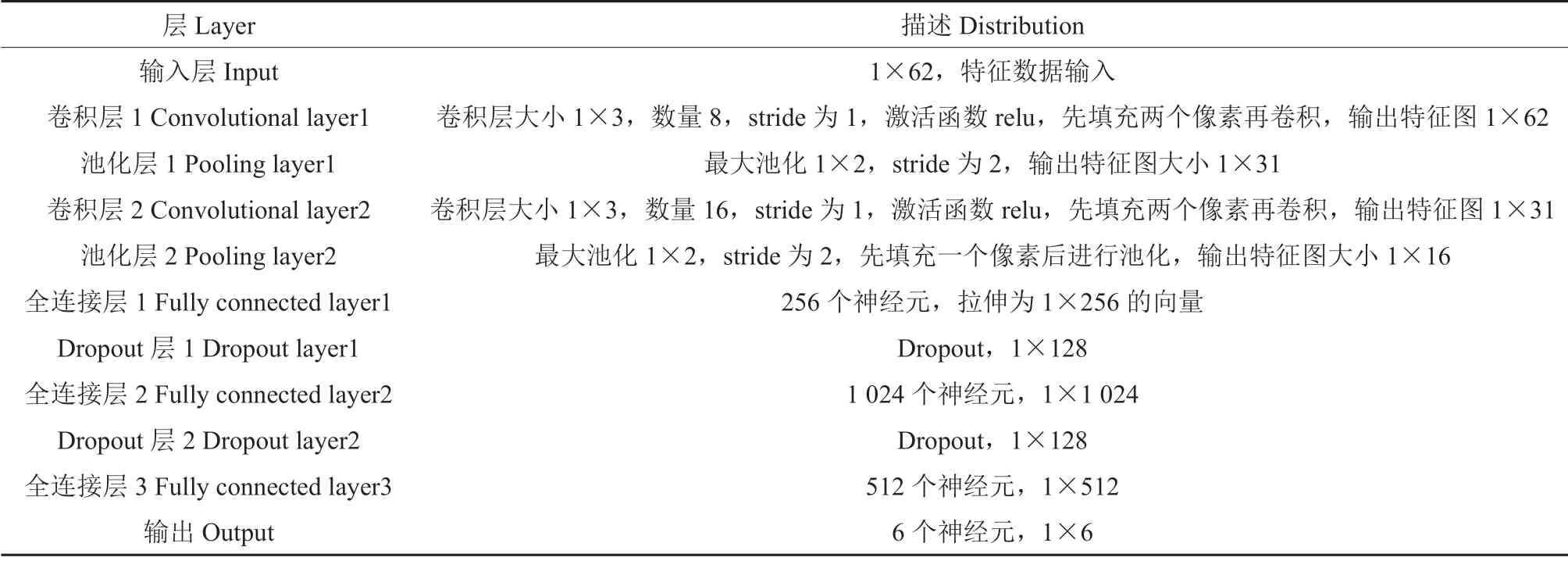
表4 1D-CNN 网络参数Table 4 Parameters of 1D-CNN
2.3 分类结果及分析
研究基于GF-1 遥感影像利用大量样本数据,对遥感影像进行分割,提取光谱、几何、纹理等特征,建立基于像元的SVM,以及面向对象的SVM,1D-CNN 模型进行遥感影像的分类,最后利用混淆矩阵的方法对各种方法进行精度评价。得到分类结果如图5所示。分析图5可以发现,基于像元的分类结果出现了很多破碎斑块,各类别之间的连续性和完整性也较差,在地类单一的中部山区出现了较多细碎的其他地类,对水域和未利用地的区分上也有较大误差,从生产者精度和用户精度来看,在建设用地和交通用地的精度较低,主要是由于这两者在几何特征上与其他地类有较大差别,但是基于像元的方法无法对其进行利用。面向对象的SVM 也出现了少量错将水域划分为未利用地的情况,从生产者精度和用户精度来看,其总体情况要明显优于基于像元的方法,但是建筑用地和交通用地的精度同样相对稍低。由此可见,面向对象相比于基于像元,其对于地物提取的完整性方面更胜一筹。1D-CNN 的总体分类结果较好,从分类结果图上看,其对建筑和水域的识别情况较好,对于交通用地的提取,1D-CNN 的效果是相对最好的,提取的交通用地相对较完整。对3 种方法的分类结果分别进行精度评价,结果如表5~7所示。将精度汇总,得到表8。
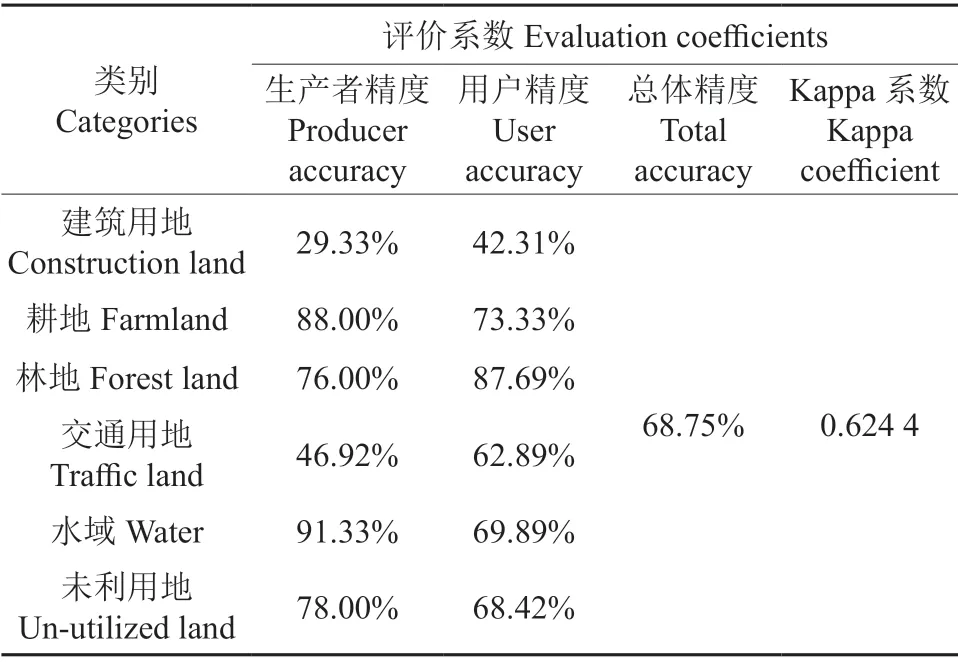
表5 基于像元的支持向量机分类精度Table 5 The classification accuracy of SVM based on pixel
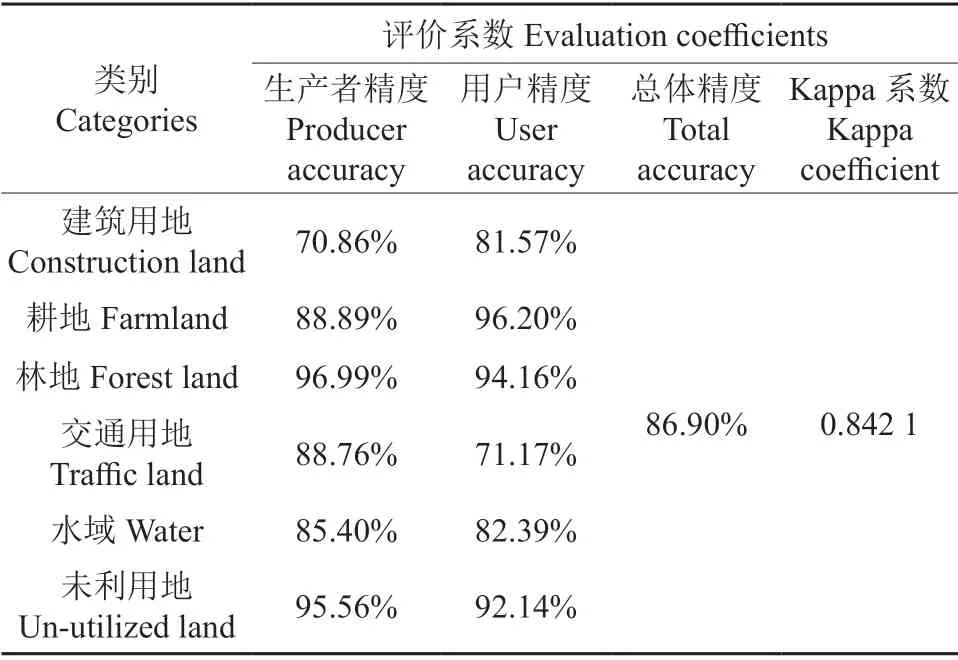
表6 面向对象的支持向量机分类精度Table 6 The classification accuracy of objected-oriented SVM

表7 面向对象的1D-CNN 分类精度Table 7 The classification accuracy of 1D-CNN
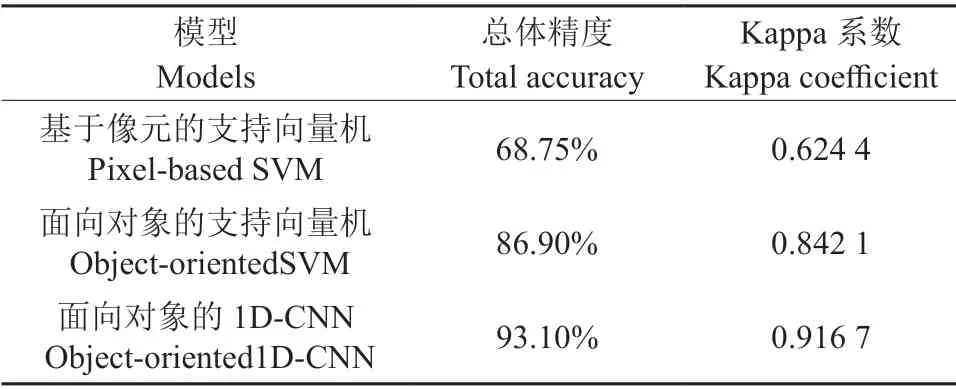
表8 GF-1 遥感影像分类精度Table 8 The classification accuracy of GF-1 remote sensing image

图5 3 种分类结果图(图a 基于像元的SVM 分类结果,图b 面向对象的SVM 的分类结果、图c 1D-CNN 分类结果)Fig.5 The Maps of classification result by three method (Map a classification result of SVM based on pixels,Map b classification result of object-oriented SVM,Map c classification of 1D-CNN)
分析可知,精度最低的模型为基于像元的SVM,其总体精度为68.75%,Kappa系数为0.624 4,由于其分类的最小单元为像元,因此分类结果破碎,完整性较差,分类精度也较低。其次是面向对象的SVM,其总体精度为86.90%,Kappa 系数为0.842 1,跟基于像元的支持向量机相比,分别提高了18.15%和0.217 7,说明面向对象的分类方法要优于基于像元的方法。1D-CNN 分类效果最佳,其总体精度为93.10%,Kappa 系数为0.916 7,除了在其他类别中精度同样较低的交通用地之外,1D-CNN 模型得到的其他类别的用户精度和生产者精度均超过85%,原因可能是交通用地达到了比较理想的分类精度。
3 结论与讨论
3.1 结 论
本研究以浙江省杭州市西湖区为研究区,以GF-1 遥感数据为研究信息源,对数据进行了常规的预处理操作,利用定量的方法确定最佳分割参数,利用分割后的对象的特征作为分类模型的输入因子,构建基于像元的SVM 和面向对象的SVM 分类模型,最后基于TensorFlow 学习框架,建立1D-CNN 的深度学习分类模型,得到以下结论:
1)提出构建moran’s I 指数与地理探测器q统计量的二维空间的方法确定最佳分割尺度,并利用最大面积法确定形状因子和紧致度的权重,最终得到分割的最佳尺度为90,形状因子的权重为0.7,0.3 作为紧致度的权重,对影像进行分割。
2)构建的传统模型中,基于像元的SVM 模型总体精度为68.75%,Kappa 系数为0.624 4,而面向对象的SVM 分类效果与之对比有较大提升,其总体精度为89.52%,Kappa 系数为0.873 7,与前者对比,分别提高了18.15%和0.217 7,由此可见,面向对象的分类模型分类效果要优于基于像元的分类模型。
3)基于TensorFlow 学习框架构建了面向对象的基于1D-CNN 的分类模型,其分类总体精度为93.10%,Kappa 系数为0.916 7,为所有模型中效果最好的。其一共两层卷积,两层池化,三层全连接,并且在前两个全连接层出使用Dropout 以防止过拟合,得到其分类总体精度为93.10%,Kappa系数为0.916 7。结果表明,将卷积神经网络与面向对象结合是一种高效的分类方法,有效的改善了基于像元的方法与传统机器学习模型在遥感分类中的精度难以提高的问题。
3.2 讨 论
本研究利用moran’s I 指数与地理探测器q统计量确定最佳分割尺度,结合了1D-CNN 与面向对象分割的方法,对研究区进行遥感分类研究,其分类效果较好,为遥感影像的分类提供了参考,但是还有许多问题需要进一步研究。
1)在面向对象的遥感影像分类研究中,最重要的部分即是影像对象的分割提取,其中,除本研究研究的分割尺度,均质因子权重外,分割方法也能对结果产生一定的影响,本研究采用的是应用较广泛的多尺度分割,如均值漂移分割[39]、分水岭分割算法[40]等,不同的分割方法的适用场景和得到的分割结果有所差异,如有研究表明分水岭算法在色彩分明的影像的分割中效果较好[41],因此后续拟研究不同的算法对于本研究的适用性,以得到最好的分类结果。
2)目前来说确定最佳分割尺度的方法可以分为定性和定量两种,定性法也叫试差法,主要是通过大量的实验,利用目视和先验知识来确定最佳分割尺度,简单易操作,但与研究者的经验水平有关,过于依靠主观。定量法则是通过一些函数或计算某些数值,将分割质量量化为不需要通过参考结果或者详细的对比数据的值,使得最佳分割尺度的选择更加科学有效。本研究采用的构建moran’s I 指数与地理探测器q统计量二维空间的方法即属于后者,利用了更加科学的定量法确定最佳分割尺度,使得结果更加具有可信度。业内目前也有其他定量的方法来确定最佳分割尺度,如黄惠萍等[42]提出了最大面积法来确定了遥感影像分类的最佳分割尺度,鲁恒等[43]研究分割尺度与亮度均值的关系,张俊等[44]提出使用领域差分绝对均值方差比(RMAS)作为最佳分割尺度的指标,后续研究可与之进行对比。
3)研究区位于杭州市西湖区,北部和南部有大片的城市居民区,而本研究选择的对象特征主要包括光谱特征、几何特征和纹理特征,其中某些地类之间存在上下文特征,如建筑用地和交通用地间往往邻近出现[42],如果能将其利用,则将有可能提高某些地类的分类精度,因此下一步研究可加入更多的适用于研究区的分类特征,进一步优化分类结果。
4)近年来出现了种类繁多的卷积神经网络模型,后续会借鉴参考多种新模型新技术,以改进模型,探究适用于遥感影像分类的神经网络结构。
