VDVI与AKAZE结合的无人机森林影像匹配方法
2021-11-06曹明兰李亚东李长青赵小平
曹明兰,李亚东,2,李长青,赵小平
(1.北京工业职业技术学院,北京 100042;2.北京林业大学 精准林业北京市重点实验室,北京 100083)
无人机搭载可见光相机可获取高重叠率大比例尺的航空影像,具有成本低、尺度大、操作简单等优势,已在森林计测领域得到了广泛应用[1]。影像匹配是数字摄影测量的核心技术之一[2],是无人机航空摄影数据处理的基础。影像匹配可细分为特征检测、特征描述、特征配对3 个步骤:1)根据特征算子的定义方式检测到特征点;2)将检测到的特征点描述成具有可比对性的高维向量;3)利用K-d 树(K-dimensional binary search trees,K-d 树)[3]等搜索算法将像对间的同名特征点进行配对,并利用RANSAC(Random sample consensus,RANSAC)[4]等算法剔除误匹配。
无人机航摄影像具有窄基线、宽像幅、大倾角的特点,与卫星影像、有人机航片相比,其影像匹配难度更大。近年来,国内外针对无人机航摄影像特征匹配的研究较为活跃。Lowe[5]提出SIFT(Scale-invariant feature transform,SIFT) 特征匹配算法,索效荣、赵启兵、贾银江等[6-8]将SIFT 特征匹配算法用于无人机影像匹配并尝试对其作了改进,余淮、蔡香玉、邓仕雄等[9-11]尝试利用SURF(Speed-Up robust features,SURF)特征提取算法对无人机影像进行匹配并做了一定改进。SIFT 和SURF 都采用高斯核卷积滤波来建立尺度空间,而高斯滤波对影像整体在各个方向上采用无差别的平滑,虽然保留了边界信息,但减弱了影像的局部细节信息的辨认度。Pablo 等[12]提出基于非线性尺度空间的KAZE 特征,采用各向异性的非线性滤波来构造尺度空间,在保留边缘信息的同时顾及了影像局部纹理结构和细节。韩敏等[13]将KAZE 特征用于无人机影像拼接,但KAZE 构造非线性尺度空间耗时较长,严重限制了其检测尺度范围。宋伟等[14]提出AKAZE(Accelerated-KAZE)算子,弥补了KAZE 在速度方面的不足。由于森林无人机航摄影像的主体内容具有一系列独有特点,导致匹配难度高于普通测绘无人机航摄影像[15]。虽然AKAZE 算子在森林影像匹配方面的表现优于其它特征算子,但由于AKAZE 对颜色不敏感导致提取的特征数量偏少。粱焕青等[16]利用AKAZE 算子进行无人机影像匹配,并利用颜色不变量改进了其难以利用颜色特征高效区分同名点的问题。但是对无人机森林航摄影像匹配时,仍然存在提取特征点数少、误匹配率高、特征点分布不均匀等不足。
综上所述,提高无人机森林航摄影像匹配的质量与效率,关键在于解决由于光照条件复杂、纹理重复率高、像点位移大等造成的错误匹配问题。鉴于此,本研究尝试引入可见光波段差异植被指数(Visible-Band Difference Vegetation index,VDVI)改进AKAZE 特征算子的特征提取方法,并通过试验探讨了该方法的有效性。
1 原理与方法
1.1 AKAZE 特征原理
AKAZE 特征是一种KAZE 特征的加速改进,是KAZE 特征原来的加性算子分类算法用速度更快的快速显示式扩散(Fast explicit diffusion,FED)来代替的一种KAZE 的改进版特征[17]。
1)AKAZE 非线性尺度空间构建
AKAZE 算法是各向异性扩散方程构建的非线性尺度空间。AKAZE 的尺度空间与SIFT 相同,也是由O个组,每组由S个子层构成的。O个组是对原输入图像进行高斯滤波,对平滑后的影像进行2 倍的下采样形成下一组影像,这样重复下采样过程得到的。S个子层是对同一组内的图像进行σi尺度各向异性扩散得到的。AKAZE 采用了快速显示扩散(FED)算法[18],求出各向异性扩散的数值解。
2)AKAZE 特征点检测
AKAZE 构建了非线性尺度空间后,特征点的位置是借助Hessian 矩阵检测的,即在非线性尺度空间内,以当前点为中心的3×3 邻域在上中下3个子层的26 个点内寻找归一化后,计算不同尺度的Hessian 矩阵的行列式LHession的局部极值点。
3)AKAZE 特征描述
AKAZE 的特征点描述子采用的是M-LDB(Modified-local difference binary)[19]。M-LDB 是把特征点周边一定范围内的子区域划分成若干个相同大小的子格网,以尺度σ为间隔进行重采样生成离散点,再用离散点的水平和竖直两个方向的导数平均值,近似代替子区域的导数值对特征点进行描述。这样不仅降低了计算复杂度,而且还提高了特征描述符的维度,进而可在三维上描述特征以达到旋转不变性和增强描述符的可区分性和鲁棒性。
1.2 VDVI 计算原理
NDVI 是提取植被信息最好的植被指数,它是利用植被对近红外光强反射、对红光强吸收的特性构造的。由于低空森林航摄无人机搭载的光学数码相机获取到的多为红、蓝、绿3 个可见光波段,没有近红外波段,因此只能使用可见光植被指数。常见的可见光植被指数大多利用植被在绿波段反射性较强、在红蓝波段反射性较弱的特性构建的[20]。常用的可见光植被指数如表1所示。
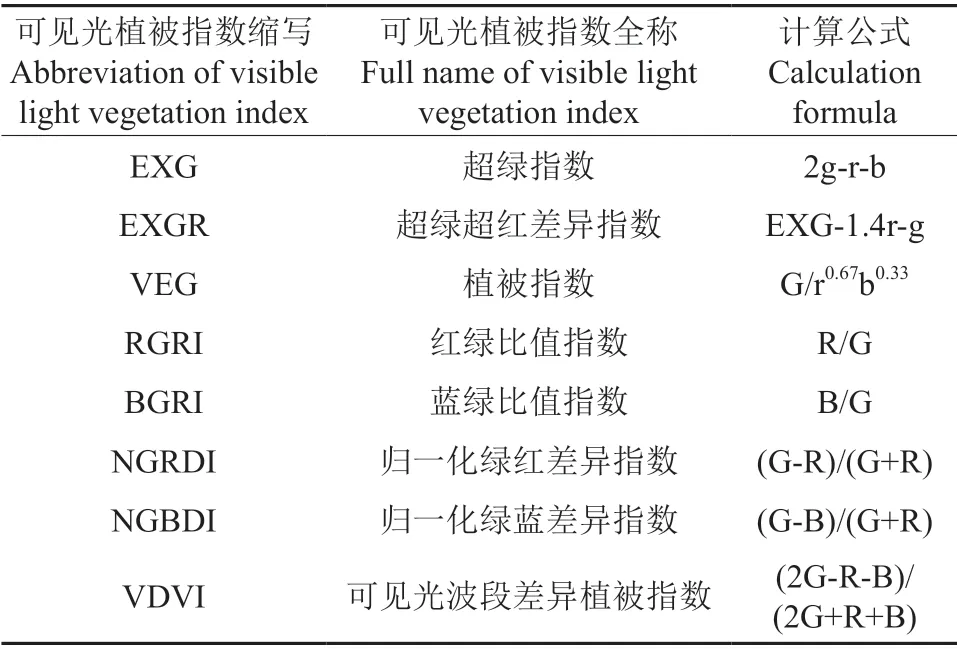
表1 几种可见光植被指数统计†Table 1 Statistics on several VDVI values
无人机森林航摄影像在绿光波段具有较强的反射特性、在红光和蓝光波段具有较强的吸收特性。因此借鉴NDVI 的构造原理,以绿光代替NDVI 的近红外,以红光与蓝光之和代替NDVI 的红光。为了让它们在数值上相当,将绿光乘以2,公式如下:
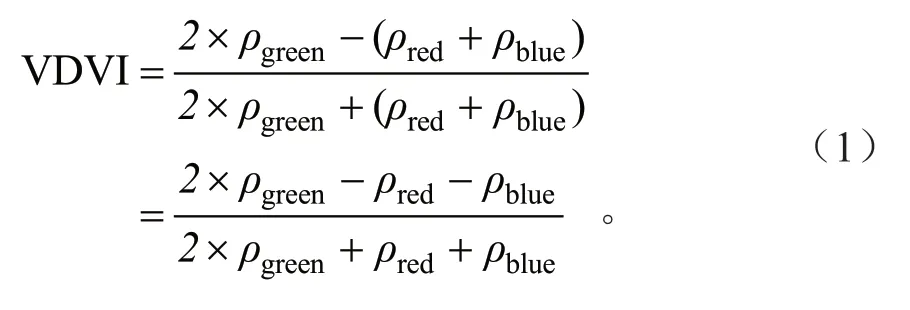
式(1)中:ρred、ρgreen、ρblue分别代表红、绿、蓝3 个波段。
本研究运用以上8 种植被指数对相同样本影像进行计算,从去阴影、去斑点及抑制非植被纹理等3 个方面对比分析,结果表明VDVI 的处理效果均优于其它7 种算法。
1.3 基于VDVI 改进AKAZE 原理
KAZE 特征的作者在其文章中给出了g函数的3 种表达形式:
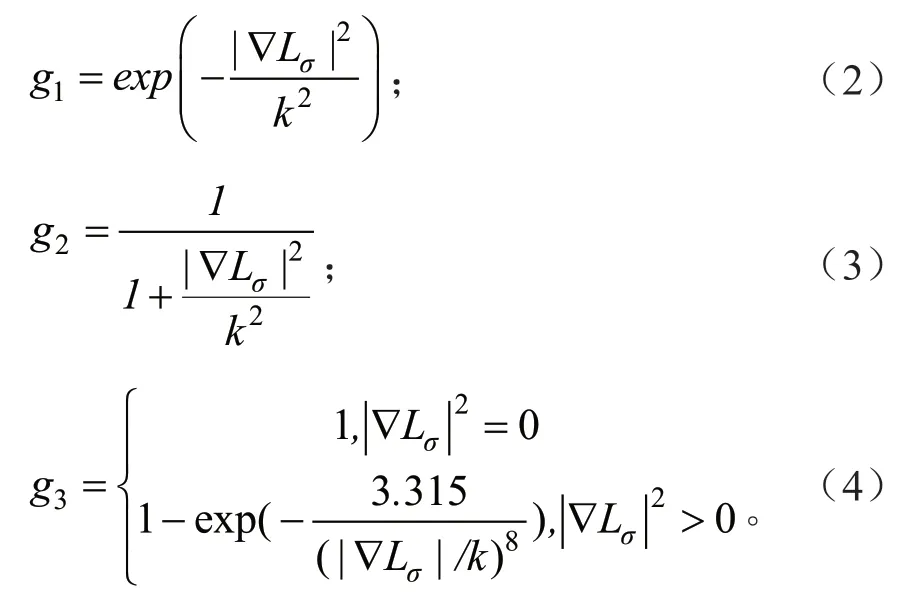
其中,式(2)有利于保留高对比度的边缘信息,式(3)有利于保留宽度较大的区域,式(4)有利于有效平滑区域内部而保留边界信息。参数k是热传导系数,用来控制边缘的灵敏度,其值越大保留的边缘信息越少。可根据梯度图像ΔLσ的直方图的分位值计算k值,如下式:

式(5)中Nb为梯度直方图的分位数量;b为梯度直方图达到70%时的分位值;Gmax为梯度直方图的最大梯度。
本研究提出基于VDVI 的AKZE 算子改进方法,在特征检测环节采用原AKAZE 的算法不变,但输入的不是原始影像的灰度值,而是使用VDVI值进行特征点检测,在特征检测时选用了有效平滑区域内部同时保留边界信息的g3函数。这样检测森林航摄影像的特征点后,很大程度上消除了阴影、反光点以及非冠层纹理信息造成的低质量特征点,从而根本上解决了大量错误匹配的问题。
VDVI 影像的信息量不如原始灰度值影像丰富,采用VDVI值描述会造成特征点的可靠性下降。因此,在特征描述环节对原AKZE 算子的描述方法做了改进。先在特征点处用原始影像信息按式(6)~(10)计算出3 比特的二进制描述子,再利用VDVI 信息算出3 比特的二进制描述子,最后将两次得到的二进制描述子按位与运算后作为最终结果。
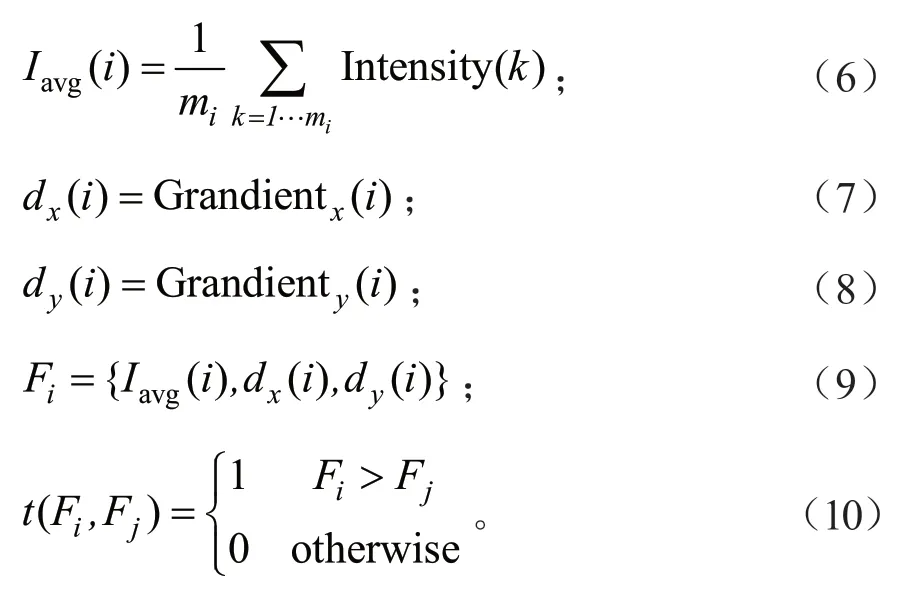
式(6)~(10)中:Iavg(i)为第i个网格内灰度均值提取函数;m为网格内采样点个数;dx(i)和dy(i)分别为第i个网格内的x与y方向梯度信息提取函数;Fi为第i个网格的信息提取函数;t(Fi,Fj)为第i网格与第j网格的二值测试函数。
2 试验与结果
本研究试验区位于内蒙古大兴安岭阿尔山林业局,地理坐标为119°51′~120°57′E,47°00′~47°55′N,平均海拔1 100 m,总面积7 408.7 km2,属寒温带大陆性季风气候,常年寒冷湿润,年平均气温-3.2℃,最高温度38℃,最低温度-45℃,年平均降水量448.8 mm,无霜期77 d。森林面积3.43×105hm2,森林覆被率71.4%,森林植物群落属寒温带针阔叶混交林,树种以兴安落叶松、白桦、山杨、旱柳及樟子松为主,还散生着少量的蒙古栎树和黑桦等。试验数据采集地点为伊尔施林场,飞行当天天气晴,风力1 级。阔叶树种为白桦,针叶树种为兴安岭落叶松。无人飞行器平台设备为固定翼测绘无人机,机载IMU 精度参数为横滚角小于±3°、俯仰角小于±3°、航向角小于±3°,搭载标定过的SONY ILCE-7R 数码相机,镜头焦距35 mm。设计航高150 m、航向重叠率80%、旁向重叠率70%,照片大小7 360×4 912 像素。
使用同一台I7-6700HQ 处理器、8 G 内存的ALIENWARE 工作站,在Windows 10 64 位操作系统上运行了Python 3.7 和OpenCV 3.4 搭配的程序开发环境,对以上外业航摄获取的影像数据(阔叶林8 906 个像对、针叶林13 529 个像对),分别用SIFT、SURF、普通AKAZE、Color-AMAZE和本研究VDVI-AKAZE 等5 种算法进行了特征提取、特征描述、特征匹配对比试验,结果如表2所示。

表2 5 种方法的特征点匹配效果对比Table 2 Comparison of feature point matching effects among five methods
平均提取特征点数=SUM(单张像片中提取到的特征点数)/像片个数、平均成功匹配点数=SUM(每个像对成功匹配的特征点数)/像对个数、平均正确匹配特征点数=SUM(每个像对剔除误匹配后的特征点数/像对个数)。
3 讨论与分析
为了更直观地反映特征检测、特征描述、特征匹配速度等性能,需将试验数据进一步构建为召回率、准确率、耗时等评价指标。召回率(Recall)反映特征检测方面性能、准确率(Precision)反映特征描述方面的性能、耗时(Time)反映的是整体特征匹配效率。假设特征点检测所用时间为Etime,特征点描述所用时间为Dtime,特征点匹配所用时间为Mtime,所有特征点对数为M,成功配匹上的特征点对数N,正确匹配点对数为n,则召回率准确率耗时Time=Etime+Dtime+Mtime。
SIFT、SURF、普通AKAZE、Color-AMAZE及VDVI-AKAZE 5 种方法,对不同树种森林航摄影像的特征提取与匹配性能指标对比如图1~4所示:

图1 5 种方法平均准确率对比图Fig.1 Comparison of average precision five methods

图2 5 种方法平均召回率对比图Fig.2 Comparison of average recall among five methods
由图1~4可知,采用各向异性的非线性滤波来构造尺度空间的3 种方法AKAZE、Color-AKAZE、VDVI-AKAZE 总体上优于采用高斯核卷积滤波来建立尺度空间的2 种方法SIFT 和SURF。在同样采用各向异性的非线性滤波来构造尺度空间的3 种方法中,本研究提出的VDVIAKAZE 方法的平均匹配准确率为74.59%,比普通AKAZE 高出了9.48 个百分点,比颜色不变量AKAZE 高出了5.26 个百分点。从图3可知,本研究方法所检测到的特征点数量少于其它方法,这是因为本研究方法在特征检测时用VDVI 值代替了灰度值,从而降低了在阴影、反光等纹理上检测到特征点数量。由图4可知,本研究方法的速度慢于颜色不变量AKAZE 的方法,是因为VDVI-AKAZE 方法为了提高特征点描述的可靠性和匹配准确率,采用了原始灰度值和VDVI 两种信息相互校正的方法进行了特征描述,这样虽然提高了特征描述环节的用时,但由于检测到的特征点数量少、质量相对较高,因此总用时仍少于普通AKAZE。
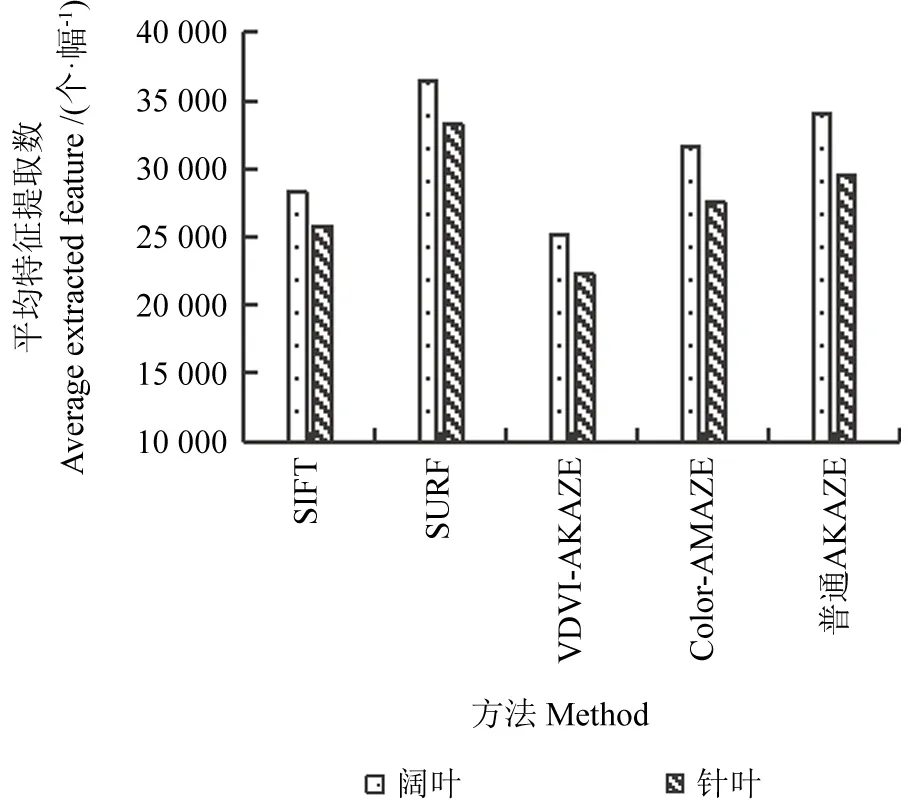
图3 5 种方法平均特征提取数对比图Fig.3 Comparison of average extracted features among five methods

图4 5 种方法平均匹配耗时对比图Fig.4 Comparison of average time consumption for feature matching among five methods
在本研究5 种方法的对比试验中,VDVIAKAZE 方法的平均匹配准确率和召回率最高、特征提取数最少,表明该方法特征点检测和描述性能最好,提取的有效特征点比率较高。为进一步分析VDVI 与AKAZE 结合的无人机森林影像匹配方法,本研究从试验数据中选择了含有建筑物、水域、道路等不同地物的具有一定代表性的示例影像,并分别将原始影像、颜色不变量和VDVI值的计算结果进行了对比分析。
由图5可直观看出,VDVI 计算后(图5c)影像的对比度与地物可区分度明显优于颜色不变量计算结果(图5b)。主要是因为无人机森林航摄影像的主体内容为林冠,而林冠的颜色单一、以绿色为主,因此颜色不变量的计算结果与VDVI的计算结果相比较,其对比度低、形成的斑块相对琐碎。利用颜色不变量与VDVI,对同一幅影像进行了去阴影、去闪光点、抑制非林冠地物纹理等方面试验,结果见图6~8。由图6可知,普通可见光原始影像(图6a)的道路上有两处明显的阴影,而经VDVI 计算后(图6c)道路上的阴影全部被消除掉了,对森林航摄影像来说VDVI 的去阴影效果明显优于颜色不变量(图6b)。颜色不变量与VDVI 都可以屏蔽掉阴影和树叶的反光点,但VDVI 的处理效果在对比度与细节保留上优于颜色不变量(图7)。由图8可知,VDVI 与颜色不变量处理都具有抑制非林冠地物纹理的的效果,图中建筑物上的纹理都被淡化了,但与颜色不变量相比,VDVI 对森林影像主体的冠幅信息保留的更为理想。

图5 颜色不变量与VDVI 整体效果对比图(a.原图;b.颜色不变量;c.VDVI)Fig.5 Comparison of overall effect between color invariant and VDVI(a.ordinary;b.color invariant;c.VDVI)
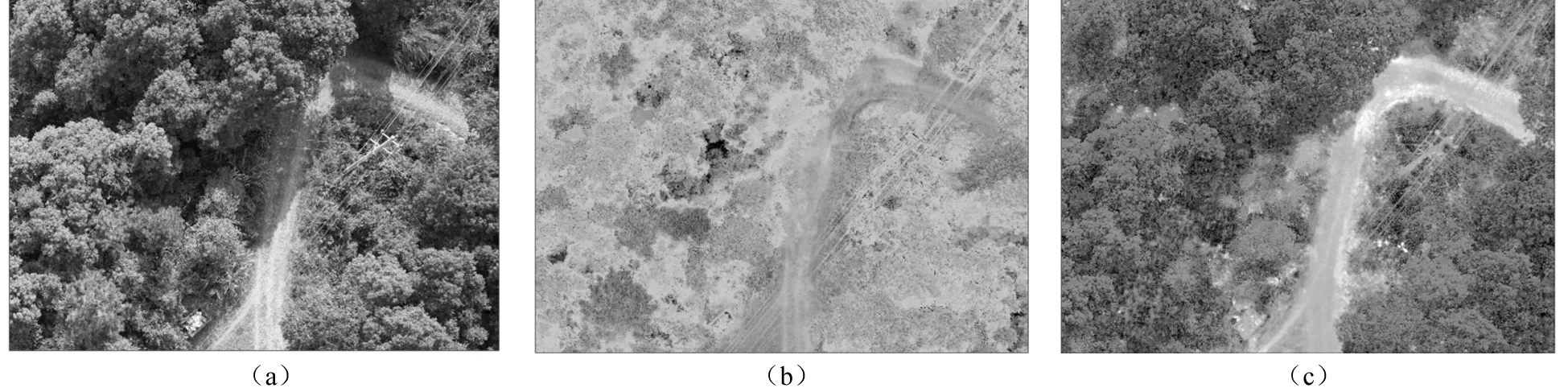
图6 VDVI 去阴影效果图(a.原图;b.颜色不变量;c.VDVI)Fig.6 Shadow removal effect of VDVI(a.ordinary;b.color invariant;c.VDVI)

图7 VDVI 去闪光点效果图(a.原图;b.颜色不变量;c.VDVI)Fig.7 Flash point removal effect of VDVI(a.ordinary;b.color invariant;c.VDVI)

图8 VDVI 淡化建筑纹理细节效果图(a.原图;b.颜色不变量;c.VDVI)Fig.8 Effect of VDVI in desalinating texture details of buildings(a.ordinary;b.color invariant;c.VDVI)
本研究方法在保持了原有的尺度不变性、旋转不变性、放射不变性等优点外,有效地增强了抗阴影、抗噪点、抗纹理重复方面的性能。该方法的平均匹配准确率和召回率最高、特征提取数最少,表明该方法的特征点检测和描述性能最好。在特征点匹配速度方面,本研究方法的处理速度在普通AKAZE 和颜色不变量AKAZE 之间,说明该方法在提高特征检测与描述性能的同时,还保证了匹配速度。
4 结 论
本研究设计试验了一种VDVI 与AKAZE 结合的无人机森林影像匹配方法。该方法从森林航摄影像主体内容的独特性出发,在AKAZE 特征各向异性的非线性滤波的基础上选择适合的传导函数,配合可见光植被指数(VDVI)有效降低了阴影、反光、非林冠地物等对森林航摄影像特征质量的影响,进而改善了森林影像匹配的准确率。试验结果表明,该方法能够在无人机森林航摄影像上的平均匹配准确率为74.59%,比普通AKAZE 高出了9.48 个百分点,比颜色不变量AKAZE 高出了5.26 个百分点,而且保持了原有匹配速度。相信随着无人机航测技术的不断普及,对森林航摄影像自动提取的需求不断提升,本研究方法将发挥更重要的作用。
