二维离散切换系统的稳定性
2021-11-04秦雪
秦 雪
(重庆工程学院 通识学院,重庆 400056)
0 引言
Roesser[1]提出了著名的二维离散系统模型,用以研究线性图像处理问题.到目前为止,已有许多学者对二维系统的稳定性进行了广泛的研究[2~5].值得注意的是,在整个系统中,模态被激活的概率有的很大有的很小,而那些不易被激活的模态对系统动态行为的影响非常小.因此,在研究这类系统的稳定性问题时有必要引入转移概率.
1 模型介绍
考虑如下的二维离散切换系统:
(1)
其中x(i,j)∈n是系统的状态向量,y(i,j)∈ny是测量输出,u(i,j)∈nu是控制输入.γ(i,j):+→{1,2,…,m}=Μ为分段常值函数,其中m>1表示模态的个数.和Cγ(i,j)都是具有适当阶数的常数矩阵.对时间序列ks,s∈+,有∞,系统的初值条件为+,且满足等式和边界条件

本文需要以下假设条件:
假设1 切换信号γ(i,j)只与i+j有关.当i+j=k时简记γ(i,j)为γk.
若切换信号γk=p∈Μ,k∈[ks-1,ks),s∈+,则dp(s)∶=ks-ks-1<∞表示γk第s次切换到模态p时的驻留时间,它是随机正变量,即E[dp(s)]=ϑp>0,且当p≠q时dp(s)与dq(s)相互独立.记θpq为γk从模态p切换到模态q的转移概率(TP),即
θpq∶=Prob{γks+1=q|γks=p}.

假设2 转移概率矩阵Θ∶=(θpq)m×m不可约.根据文献[6],此时Θ存在唯一的平稳分布π=(π1,π2,…,πm),且它满足
设计依模态的输出反馈控制器如下:
u(i,j)=Kγ(i,j)Cγ(i,j)x(i,j),
(2)
其中Kγ(i,j)∈nu是控制增益.
将(2)代入系统(1),可得以下闭环系统:
(3)

则称系统(3)是渐近稳定的,其中ξT(k)=(xT(i,j+1),xT(i+1,j)).
本文的目的是证明闭环系统(3)的渐近稳定性.
2 主要结果

(4)
(5)
(6)
则系统(3)是渐近稳定的.
证明设i+j=k∈[ks-1,ks)⊂+,γ(i,j)=p∈Μ.构造如下的Lyapunov泛函:
(7)

由式(7)可得
(8)


于是有
故有
当i+j=k∈[ks-1,ks)时,
(9)
对∀i+j=k∈+,k∈[ks-1,ks),根据式(5)和式(9)可得


由条件(6)可得以下不等式:

3 数值模拟
令Μ={1,2,3},考虑系统参数为


由图1和图2可见系统(3)是渐近稳定的.

图1 闭环系统中状态x1(i,j)
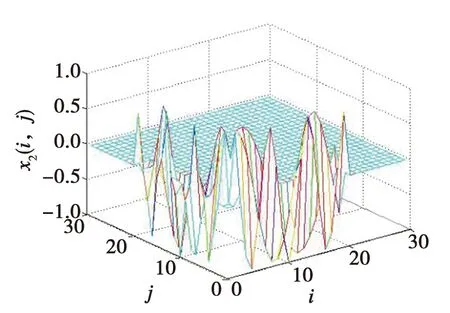
图2 闭环系统中状态x2(i,j)
4 小结
本文通过线性矩阵不等式给出了一个保证闭环系统(3)渐近稳定的充分条件,然后通过数值模拟验证了该结果.
