应用地基激光雷达对毛竹林有效叶面积指数的提取及敏感性分析1)
2021-11-03黄兰鹰郑亚雄张美曼尹子旭姜小雨肖箫官凤英
黄兰鹰 郑亚雄 张美曼 尹子旭 姜小雨 肖箫 官凤英
(国家林业和草原局-北京市共建竹藤科学与技术重点实验室(国际竹藤中心),北京,100102)
毛竹是我国南方重要的经济生态树种,具有生态系统服务、生物多样性保护和促进社会经济发展等重要价值[1]。毛竹具有速生丰产、收获周期短的特点[2]。毛竹与其他木材相比,竹材具有弹性强、韧性好等优良力学性能,广泛运用于家具、胶板、竹碳和竹纤维等行业[3]。毛竹具有不同于其他森林类型的优良固碳能力[4],对毛竹的培育与经营在缓解气候变化中具有重要作用[5]。由于毛竹是典型的异龄结构,择伐仍然是毛竹林主要的采伐方式。但随着我国经济快速的发展和人口老龄化的加剧,劳动力成本日益上升和劳动力资源缺乏,传统竹林采伐方式已经成为竹林经营的瓶颈之一,也是限制竹产业发展的重要因素。为了降低竹材采伐成本,提高采伐效率,毛竹林带状采伐方式得到了极大的关注。目前对带状采伐后毛竹林恢复的研究主要集中在林下特征[6-8],而对冠层的研究较少。冠层结构控制着光照的质量、数量、时间和分布,叶面积指数作为冠层结构的参数之一,表征着植被生长状况的关键物理量,控制植被的生物物理过程(如光合作用、呼吸作用、蒸腾作用、碳循环和降水拦截等[9-11])。同时,叶面积指数也是描述大气和陆地生物地球化学交换过程的重要参数[12-14],叶面积指数的大小不仅反映森林经营管理的水平[15],也可以为带状采伐后毛竹林恢复特征的评估提供数据支撑。
叶面积指数可以通过直接和间接两种方法测量[16]。直接测量方法是通过破坏性采样,对叶片进行计数和测量,该方法可以得到高度准确的结果,但缺点是具有破坏性、劳动强度大、耗时且适用范围有限。针对叶面积指数直接测量方法的缺点,测量叶面积指数的间接方法应运而生,主要包括使用遥感影像(如MODIS、AVHRR等)和地面光学仪器(如LAI-2000植物冠层分析仪、半球摄影等)。然而,间接测量的方法也有其自身的局限性,遥感影像记录叶面积指数较高的冠层存在光谱信号的饱和效应,背景的光学特性在不同的空间和季节存在差异,以及对冠层下部结构信息获取的局限性,这些都是影响叶面积指数估算精度的不利因素[17]。光学仪器应用贝尔定律,结合消光系数和孔隙率来估算植被的叶面积指数,其对曝光和光照射条件高度敏感,分辨率也是影响叶面积指数估测精度的重要因素[18]。
地基激光雷达(TLS)作为一种主动遥感技术,能够直接、快速、精确地获取研究对象的三维地理坐标。因此,通过地基激光雷达提供的森林结构的精确三维信息[19],可以有效地评估树冠特征、提高叶面积指数估算的准确性,也避免了叶面积指数较高树冠的饱和效应。无论通过把三维TLS点云数据转化为二维栅格数据估算叶面积指数[20-21],或者利用点象限分析的方法计算叶面积指数(如形态变化[22]、局部表面拟合[23]、3D凸包算法[24]等),这些方法无法重建树木和进行枝叶分离,也无法分析噪声对叶面积指数估算的影响。因此,利用地基激光雷达信息计算叶面积指数,需要计算激光束与冠层的接触率或间隙率,也需要对TLS点云进行体元化[25]。体元化要求对原始点云数据进行归一化处理并为空间中的体元提供确定的体积,体元化的方法具有不需要对冠层组分的空间分布、大小或形状进行假设的特点。Hosoi et al.[25]利用TLS点云数据,根据体元化的方法在单木水平上计算了叶面积指数,认为当激光入射天顶角为57.5°时,叶倾角校正因子与叶倾角无关,可以近似等于常数;Zhu et al.[26]通过建立三维体元模型结合分层的方法计算叶面积指数,发现估算的叶面积指数比地面实测值偏低0.306,但是各分层空间变化曲线比较吻合;王洪蜀等[27]基于体元的冠层分析法对单棵玉兰树冠层的有效叶面积指数进行反演,相对误差为1.26%;Wu et al.[28]采用体元化的方法量化了澳洲芒果、坚果和鳄梨的树冠叶面积、叶面积密度和叶面积密度垂直分布的变化,其结果可以作为评价树木健康的一般指标,也可以帮助种植者改善灌溉和施肥决策。因此,基于体元估算叶面积指数是一种十分有效的方法。
然而,在计算叶面积指数时,需要仔细选择体元大小,体元大小决定计算的效率和精度,影响叶面积指数估算的准确性;噪音点也是影响叶面积指数估算准确性的重要影响因子,目前很少有研究分析去噪对叶面积指数估算的影响;使用体元模型计算叶面积指数时,需要实际测量冠层叶片的倾斜角度,计算叶倾角的校正因子。一般假设冠层叶片随机分布,将叶倾角的校正因子设为1.1,得到的叶面积指数是有效叶面积指数(LAIe),而非真实叶面积指数。同时,目前使用体元方法估算有效叶面积指数多集中在乔木,应用于毛竹方面的研究鲜见报道。因此,针对带状采伐毛竹林监测和恢复特征评估的需要,以3种不同宽度(5、8、12 m)带状采伐毛竹林为研究对象,利用TLS多站扫描获取毛竹林完整点云数据,采用基于体元的冠层分析方法对样地毛竹林有效叶面积指数进行提取,并进一步分析有效叶面积指数的估测值对去噪和体元大小的敏感性。
1 研究区概况
研究区位于江苏省宜兴市宜兴国有林场,该地区属天目山余脉,南部为丘陵地区,北部为平原区。地处亚热带季风气候,降水丰沛,但降水量的时空分布不均匀,春夏降水比较集中,年降水量1 177 mm以上,年平均气温在17.5 ℃,年平均无霜期240 d。研究区毛竹林占80%,森林覆盖率为97.5%。
2 研究方法
2.1 样地设置
实验使用的地基激光雷达设备是Trimble TX8,该仪器具有360°×317°的视场角和每秒百万点的数据获取速度,在水平和垂直方向上均以0.036°为步长,Trimble TX8具体性能指标见表1。样地设置为5 m×20 m(P1),8 m×20 m(P2),12 m×20 m(P3)大小的3块样方,样地地势均较为平坦,且林下植被较少。数据采集时间为2019年12月,每个样地扫描5站,采用“角落设置”的方法布站[28],在几乎无风的条件下进行扫描。在每块样地中布设了6个参考球,所有参考球不在同一个水平面上,保证扫描站每次至少能看到3个以上参考球,以便后期多站数据拼接处理。采用LAI-2000植被冠层分析仪在每块样地中心以及东、南、西、北4个方向共测量5次,叶面积指数平均值作为样地的叶面积指数实测值[29],以尽可能准确表达样地的叶面积指数,3块样地测得的叶面积指数值分别为2.78、2.94、2.54。
2.2 数据预处理
点云配准:采用多站扫描的方式最大程度地减少竹枝和竹叶导致的遮挡效应,尽可能获取样方完整的点云数据。利用Trimble TX8自带的Trimble RealWorks 10.1软件提供的自动识别和配准功能,对样地多站点云进行配准拼接,3块样地配准的平均距离误差均小于0.002 m,满足林业应用精度需求。

表1 Trimble TX8的性能指标
点云去噪:点云数据中噪声点的数量与扫描距离、扫描入射角、扫描速度和天气状况等多种因素有关。采用统计离群值分析的方法去除噪声点[30]。该方法对每一个点搜索指定邻域点个数的相邻点,并计算该点到相邻点的平均值距离、平均值距离的中值和标准差。如果这个点的平均值距离大于最大距离(最大距离=中值+标准差倍数×标准差),则认为是噪声点,将被去掉。但该方法需要优化相邻点的数量(n)和标准差的倍数(K)两个参数,通过对参数n∈[0,100]间隔为10、参数K∈[0,10]间隔为1进行试验,当参数n和K分别设置为50和5时效果最好。
2.3 叶面积指数提取
地形校正:为了去除地形对叶面积指数提取的影响,需要对样方的激光雷达点云数据进行归一化处理,消除地形因子。首先采用改进的渐进加密三角网滤波算法从激光雷达点云数据中分离地面点[31],然后利用反距离权重插值生成样方的高程,最后对预处理的TLS数据进行高程归一化处理。
体元化:在样地点云数据地形校正后,使用体元的冠层分析法计算有效叶面积指数。该方法是根据冠层与激光束的接触频率,并对点云数据进行体元化[25]的基础上计算有效叶面积指数。体元大小根据激光仪的测距范围、光束的发散度和直径来决定[32]。假设物体完全拦截了发射的激光束,那么所有的激光束都会提供有效的返回值,则可以通过计算两个相邻激光束之间的距离[33],具体计算公式为:
dCD=(tanα×Di)-2R。
式中:R为半径,Di为扫描仪的扫描范围,BDv为光束发散度,BDm为激光仪出口处的光束直径,dCD为两个相邻激光束之间的距离,α为角分辨率。
Trimble TX8在垂直和水平平面上以0.036°的固定步长发射激光束,每个激光束发散度为0.3 mrad,激光仪出口处的光束直径为6 mm,最大的扫描范围为120 m,则相邻激光束之间的距离(最大未采样距离)为33.40 mm。
体元大小确定后,将整个区域的点云划分为l×w×h个体元,体元大小为Δl×Δw×Δh(即为dCD),计算公式如下:
式中:int是取整符,表示将计算得到的小数取整为与其最接近的整数,(xmin,ymin,zmin)表示TLS点云数据(x,y,z)的最小值,(xmax,ymax,zmax)表示TLS点云数据(x,y,z)的最大值。
Δl×Δw×Δh是体元大小,l×w×h表示整个点云区域的体元数量。体元的体素值通过判断体元内是否有激光点来确定,如果体元内激光点个数大于等于1,代表激光束被拦截,体素值赋为1,否则体素值赋为0。使用体元化的方法,可以将点云数据分组到每个体元,因此,体元化减少了点云数量,并提高了点云接触频率的计算效率,有利于信息的表达。
有效叶面积指数的计算:在点云数据体元化后,将其分为s层,每层厚度为Δs,将每个水平层厚度设置为1 m,即Δs=1,则s=h/Δs(h为样地内毛竹最高的竹高)。根据构建的三维网格,统计每个水平层内三维格网的总数和包含激光点的格网数量,计算每个水平层激光束的接触频率[25],计算公式如下:
N(s)=nI(s)/nT(s)。
式中:N(s)为第s水平层激光点的接触频率,nI(s)为第s水平层包含激光点的格网数量(即体素值为1的体元数量),nT(s)为第s水平层的三维格网总数。
根据第s水平层激光点的接触频率计算第s水平层的有效叶面积指数L(s),计算公式如下:
L(s)=α(θ)×N(s)。
式中:α(θ)为叶片倾斜度校正因子,本文假设毛竹冠层叶片随机分布,将叶倾角校因子设为1.1[25]。将各层的LAIe进行累加,得到整个统计区域内的有效叶面积指数,计算公式如下:
采用常用的绝对误差和相对误差对估测的有效叶面积指数进行精度评价。
3 结果与分析
3.1 去噪对有效叶面积指数估算的影响
图1显示了单株毛竹去噪前后的TLS点云数据,大多数的噪声点位于相邻叶片之间的空间和冠层上部,通过统计离群值可以很好的去除这些噪声。由表2可知,去噪前后有效叶面积指数有明显的差异,去噪前,3块样地估测的有效叶面积指数分别是3.62、3.75、3.26,与地面实测值相比,3块样地有效叶面积指数估测的精度分别为69.78%、72.45%、71.65%。去噪前后样地有效叶面积指数与实测叶面积指数的绝对误差从0.84减少到了0.34,且3块样地有效叶面积指数估测的精度均达到了86%以上,其中P1样地的精度提高了16.55%,P2和P3样地的精度分别提高了15.59%、14.57%。
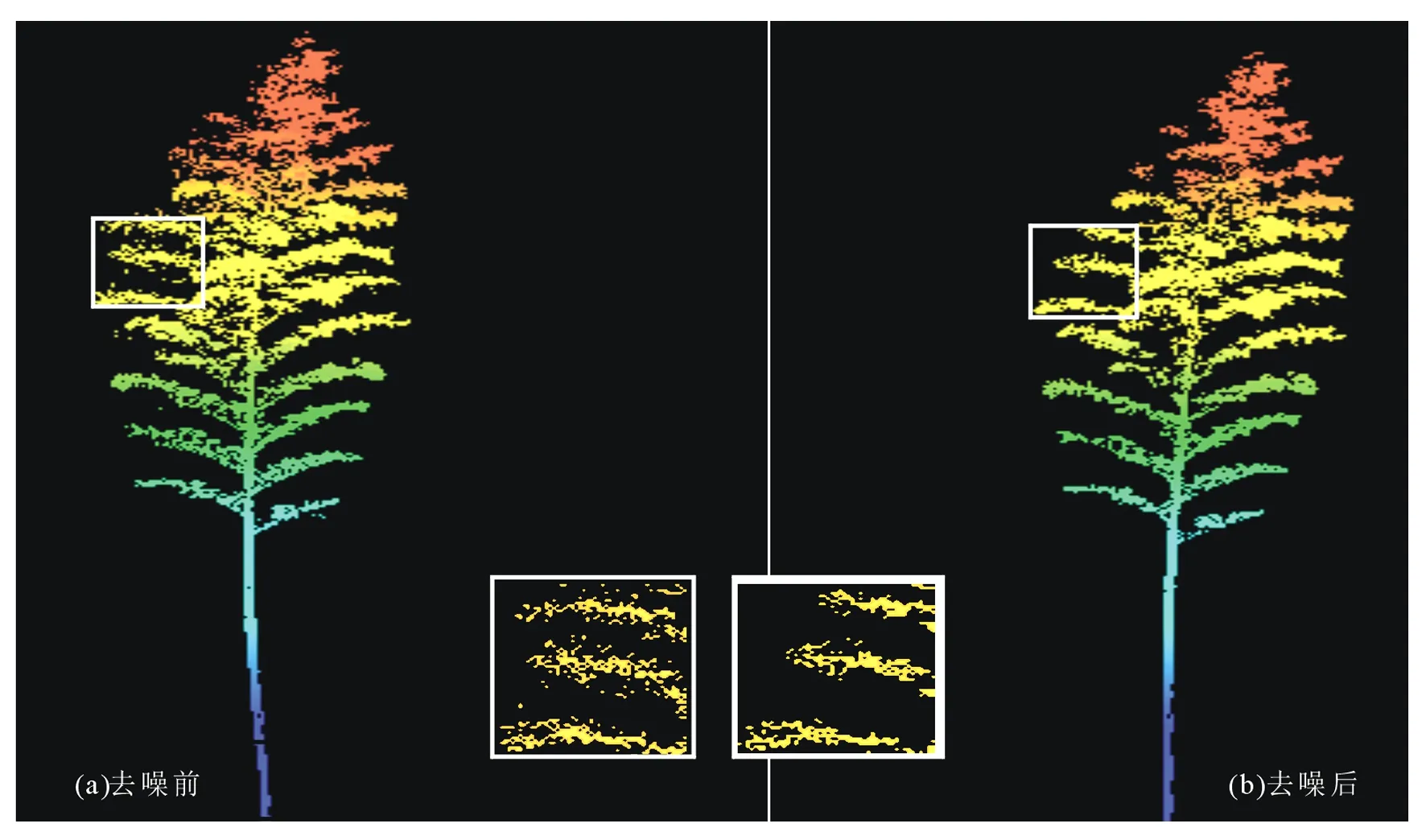
图1 去噪前后点云的比较
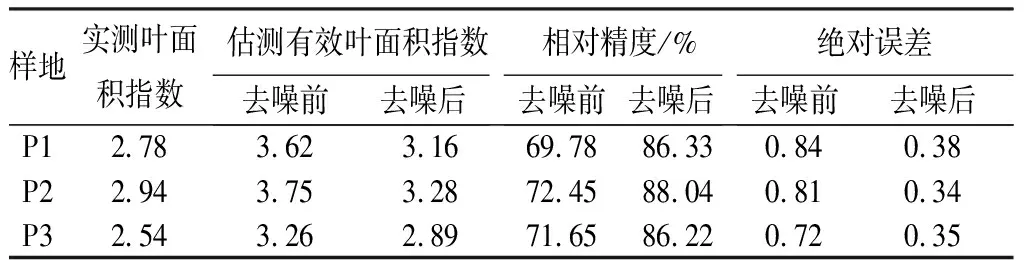
表2 去噪对有效叶面积指数的估算
3.2 体元大小对有效叶面积指数估算的影响
体元大小会影响冠层结构信息的细节以及接触率的计算精度,也是获取植被冠层信息的重要参数。为了探究体元大小对有效叶面积指数的影响,本文使用了6种体元大小(1、2、3、4、5、6 cm)构建体元化模型,得到不同体元大小情况下有效叶面积指数的变化。
由图2可知,当体元大小从1 cm增加到6 cm时,3块样地的有效叶面积指数分别从1.18、0.98、0.72持续增加到5.08、5.80、6.00。且体元大小和有效叶面积指数之间呈高度对数相关,3块样地的决定系数分别为0.98、0.97以及0.94。这表明应用体元冠层分析法估算的有效叶面积指数对体元大小十分敏感,体元大小的直接影响有效叶面积指数估算的精度。因此,选择合适的体元大小构建三维体元模型对准确反演样地有效叶面积指数具有重要意义。
与栅格图像的像元类似,在构建三维体元模型时,体元越小,体元数量越多,数据量越大,越能详细表达冠层内部的结构信息,进而能更加准确模拟激光束穿过竹林冠层的内部情况。但是当体元大小小于激光采样最小间距时,此时属性为1的值将达到最大值,而属性为0的值会随着体元减小而继续增加,导致计算结果偏小;体元越大,体元总数量越少,简化了点云数据,体元越大包含更多的空隙,表达的冠层结构更加模糊,导致结果高估。因此,应用体元冠层分析法计算叶面积指数时,需要在体元大小与间隙数量之间进行平衡,以提高叶面积指数计算精度。本文研究中,有效叶面积指数在一个数量级上变化,与地面实测叶面积指数相比,合适的体元大小为3 cm,这与利用激光仪的测距范围、光束的发散度和直径所推导出来的体元大小相差不大。

图2 体元大小与有效叶面积指数的关系
4 讨论
根据本文的实验结果可知,与实际叶面积指数测量值相比,应用TLS数据估算的有效叶面积指数存在一定的误差,这与前人的研究一致[27,34]。一是由于竹枝和密集的竹叶引起的遮挡效应,激光束不能把所有的叶子记录下来,遮挡是应用TLS数据估算有效叶面积指数的主要限制因素[25]。二是3块样地假设的叶倾角校正因子均为1.1,没有考虑毛竹真实叶倾角的差异;同时,点云的滤波方法、样地冠层真实的边界等因素也影响有效叶面积指数的估算精度。三是未直接对非光合组织(如茎干和竹枝)进行分离,林分中非光合组织的点云参与了有效叶面积指数计算,影响了有效叶面积指数估算的准确性,未来应结合竹子的茎叶分离算法,进一步探讨竹秆和竹枝等非光合组织对有效叶面积指数估算的影响。
应用点云的最大距离,采用统计离群值分析的方法去除噪声点,并评估了噪声点对有效叶面积指数估算精度的影响。点云去噪后,3块样地叶有效叶面积指数的估测精度分别提高了16.55%、15.59%、14.57%,表明噪声点是影响有效叶面积指数估算精度的重要因素。地基激光雷达较高的发射频率和较短的范围扫描将激光脉冲入射到邻近区域,导致在叶片之间检测到更多的反射能量[35]。因此,需要在扫描精度、扫描距离和噪声点数量之间达到一个平衡,以提高有效叶面积指数估算的准确性。
体元大小是估算有效叶面积指数的重要影响因素。应用体元的冠层分析方法是通过计算激光束与冠层的接触频率进行,有效叶面积指数与体元大小的相关关系可以通过体元大小与间隙数量之间的平衡解释。把三维格网中有激光点的体元赋值为1,体元越大,赋值为1的体元越多,计算的有效叶面积指数也大。但是赋值为1的体元中将包含更多潜在的空隙,造成结果存在高估,因此,在点云密度足够高的条件下,体元大小应该越小越好。实际上,由于脉冲之间的步长较小,属于同一单个叶子的两点之间仍然存在一定的间距,当体元太小时,该间距很容易被视为空白体元,同时体元过小会增加数据量,这违背体元化“降维”的思想。体元大小通过影响间隙率进而影响有效叶面积指数估算的准确性,因此,计算有效叶面积指数时,需要选择合适的体元大小。Wu et al.[15]研究发现,尽管体元大小对叶面积指数估算的精度有影响,但不同体元大小计算出的叶面积指数变化是一致的,表明如果关注相对叶面积指数的变化,则体元大小对叶面积指数估算的精度影响较小。
5 结论
利用TLS多站扫描对3种不同宽度(5、8、12 m)带状采伐毛竹林进行了数据获取,采用基于体元的冠层分析方法对样地毛竹林有效叶面积指数进行提取,并进一步分析了有效叶面积指数的估测值对去噪和体元大小的敏感性。(1)体元化的TLS点云数据能够实现毛竹林有效叶面积指数的提取,3块样地有效叶面积指数的提取精度分别是86.33%、88.04%、86.22%;(2)去噪后,3块样地有效叶面积指数估算的精度分别提高了16.55%、15.59%、14.57%;(3)有效叶面积指数的估算精度与体元大小高度相关,通过与实测叶面积指数相比,适合有效叶面积指数估算精度的体元大小为0.03 m。本文的研究结果可为带状采伐毛竹林监测和恢复特征评估提供数据支撑,对利用TLS数据提高有效叶面积指数的估算精度具有参考作用。
