绳驱动仿生软体机械臂结构设计与弯曲特性仿真①
2021-11-02韩迎鸽吕会梅
杨 程, 韩迎鸽, 吕会梅
(1.安徽理工大学机械工程学院,安徽 淮南232001;2.安徽理工大学电气与信息工程学院,安徽 淮南232001)
0 引 言
随着现代科学技术的日益发展,机器人技术在日常生产生活中的应用愈发普遍。但是传统的刚性机器人由于结构特性的原因[1],无法适应非结构环境,不能够胜任一些特殊领域的工作要求,因此,软体机器人应运而生[2]。软体机器人的设计灵感主要是受到软体动物或动物的软体器官的启发,例如:大象鼻子、章鱼触手、蛇的躯干等[3];这类软体仿生机械臂和传统的刚性机械臂相比,软体机械臂能更好的适应特殊的工作环境,质量轻便,具有更高的安全性并能在特定环境中完成一系列的抓持与探测任务[4,5]。软体机器人技术经过快速的发展,已经有了多种不同的驱动方式,如:流体驱动,线绳驱动,化学材料驱动等[6]。在前人研究的基础上,给出了一种基于绳驱动的波浪状软体仿生机械臂,该机械臂的潜在应用场景是精密仪器生产和深腔环境探测[7],目标是提高软体机械臂的运动精度,使其能够有效解决目前绳驱动圆柱形软体机械臂弯曲性能不足和复杂环境适应能力的问题,并且具备较好的负重能力,可以携带一定的抓取和探测设备;因此该软体机械臂在未来的实际生产中具有较大的潜力。
1 软体机械臂系统设计
软体机械臂系统由软体机械臂主体和外围驱动设备两部分组成。将机械臂的驱动设备安置在软体机械臂主体以外,不仅确保了软体机械臂材料本身的柔韧性,能更好的适用于复杂恶劣的的工作环境,而且能有效地做到软体机械臂的轻量化。
1.1 软体机械臂的主体
软体机械臂的主体结构由手臂主体、受力垫片、驱动绳、固定卡扣四部分组成。其结构如图1所示。

图1 软体机械臂主体结构图
手臂主体是软体机械臂中的重要柔性部件,结合柔顺机构学原理将手臂设计为圆柱波浪状,通体采用硅胶浇筑制成;软体机械臂全长为150mm,外圈直径为42mm,内圈直径为24mm,手臂两个波峰间的距离为10mm,手臂的外壁厚度为2mm,软体机械臂内部距离圆心18mm处,沿机械臂纵轴设置有四个贯穿手臂的通孔,驱动绳可以在手臂上的通孔内运动,驱动绳一端通过固定卡扣与软体机械臂一端的受力垫片固连,在驱动绳牵引过程中可以减小应力集中所造成的手臂过度变形,另一端从软体机械臂的末端穿出与外围驱动装置相连。
1.2 软体机械臂的驱动装置
软体机械臂有驱动绳穿出的一端固定在支架的下方,在软体机械臂没有受到驱动绳牵引时,机械臂由于重力原因呈自然下垂状态,支架的上方分别设置有四个舵机,四个滑轮,舵机与驱动绳通过滑轮相连为软体机械臂提供动力;当收到上位机发出的指令,舵机向控制的方向转动,在舵机的带动下驱动绳将缩短或伸长一定的距离,驱动绳的长度变化带动软体机械臂朝某个方向运动并弯曲一定的弧度,通过控制四根驱动绳的长度变化量,就能使软体机械臂运动到期望的位姿。
2 分段恒曲率假设
由于软体机械臂通体由硅胶浇筑而成,相比于传统的机械臂而言,没有关节变量的概念,软体机械臂通过控制四根驱动绳的长度变化量来达到理想的位姿,而仅仅通过驱动绳的长度变化量无法对软体手臂直接进行运动学表示,因此对软体机械臂的整体结构做了一定的简化。虽然软体的机械臂没有类似于传统刚性机械臂那样的关节结构,但是在软体机械臂受到一定的驱动力而没有发生剧烈变形时,可以假设在软体机械臂上任意一小段变形程度都比较小,可以将这一小段近似看成是一段受力均匀的圆弧,而整个软体机械臂都是由这样的小段圆弧组合而成。基于这样的原理,学者们提出了分段恒曲率的假设[8,9],分段恒曲率假设需满足以下两个条件:
(1)软体机械臂以恒定曲率弯曲;
(2)软体机械臂在弯曲时忽略重力引起的形变。
由分段恒曲率假设可以得出,软体机械臂是由一系列的弯曲圆弧构成,而每一段弯曲圆弧都有三个参数所表示,即:圆弧的曲率k i、圆弧弯曲的平面角φi,弧长l i。如下图2所示,圆弧线o i-1o i是分段圆弧的中心线,z i-1过o i-1点与中心线相切,x i-1为o i-1点与驱动绳1所在点连线的方向,y i-1的方向为o i-1点与动力驱动绳4在截面所在点的连线方向。圆弧所在的平面与x i-1轴正方向的夹角为弯曲平面角φi,r i为圆弧到中心点的曲率半径,θi表示该段圆弧所对应的圆心角。坐标系o i-1x i-1y i-1经过一系列的坐标变换可以得到坐标系o i x i y i,将所有分段圆弧按照上述变换规则层层递推,便能推导出软体机械臂末端位姿到基坐标系的位置关系。

图2 分段恒曲率假设条件下第i段软体机械臂
3 有限元仿真分析验证
(1)使用建模软件Solidworks对软体机械臂本体进行实体建模,软体机械臂本体各尺寸的参数如表1所示。
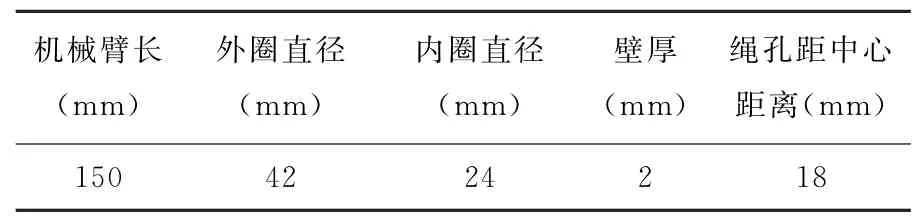
表1 软体机械臂本体的尺寸参数
(2)将绘制好的机械臂导入到WORKBENCH中进行仿真分析,验证驱动绳在不同长度变化量时带动机械臂运动的变化情况,考虑到机械臂本体由超弹材料硅胶浇筑而成,所以选择超弹材料中的YEOH-3模型进行仿真,YEOH-3超弹材料的基本设置参数如下表2所示。

表2 YEOH-3超弹材料的基本参数
(3)在软体机械臂弯曲运动中,只需一根驱动绳提供有效动力,软体机械臂就能沿驱动绳的方向弯曲;在仿真分析中主要验证了一根驱动绳作用时的运动情况,在仿真分析过程中将连接支架的一段手臂设置为固定,再分别对驱动绳添加不同的位移量,为了提高仿真分析的效率与准确性,对仿真模型做了一些结构优化。如图3为驱动绳长度变化量为60mm时软体机械臂的应力云图和弯曲变形云图。

图3 软体机械臂应力云图与变形云图
如图4为软体机械臂在驱动绳长度变化量分别为40mm和60mm时,机械臂的整体变形量以及驱动线绳所受到的力,从图中可以看出机械臂的整体变形量和驱动绳所受反力的变化趋势一致,恰好吻合了刚度一致的特性。

图4 机械臂变形量与驱动绳受力情况
4 结 语
提出了一种基于绳驱动的仿生软体机械臂,首先简要介绍了该仿生软体机械臂主体的结构设计以及其整体外围驱动装置的结构构造,然后基于软体机械臂无传统关节变量的情况引入了分段恒曲率的理论假设,并分析确定了小段机械臂圆弧的相关理论参数,给出驱动绳在长度发生变化时每一小段的偏转和弯曲状态变量,最后对该模型进行了弯曲特性仿真,分析对比了驱动绳在不同长度变化量时软体机械臂的变形情况,该仿真结果显示了本文提出的软体机械臂模型具有良好的弯曲性能以及承载能力,对于非结构化环境下的作业与探测具有重要意义。
