Garmin航电系统飞参数据的特性分析
2021-11-01游磊,孙宏,姜迪,包迪
游 磊, 孙 宏, 姜 迪, 包 迪
(1.中国民用航空飞行学院 民航飞行技术与飞行安全科研基地, 四川 广汉 618307;2.中国民用航空飞行学院 广汉分院, 四川 广汉 618307)
Garmin航电系统是现代小型飞机上普遍采用的一种航电系统,它在全球各种通用飞机的市场份额超过了90%,是通航飞机上标准配置的一种飞机航电系统。在国内,由于Garmin航电系统操作简单、使用方便,已经广泛用于各轻小型飞机、直升机,涉及包括护林防火、飞播造林、紧急救援、空中旅游、航空摄影等各行业。
Garmin航电系统的主要参数通过传感器组件采取传递出以1 Hz的频率记录保存在sd卡上,这些参数导出即为飞参数据,它是对飞机飞行参数的一个重要记录。Garmin航电系统记录的飞行过程中的姿态参数和操纵数据是反映飞机状态、分析飞行操纵品质、开展飞机维修的重要依据。Garmin1000系统集通信、导航和GPS于一体,集成了导航、通信、航向、姿态和显示等电子元件,用两个12 in的电子显示屏代替了传统的仪表[1-2]。G1000系统由多个航线可更换组件组成,它界面简单的同时信息全面,减少了飞行员的工作负荷,机务人员的维护难度也得到降低[3]。本文以Garmin1000系统为研究对象来介绍飞参数据的来源构成及特点。通过分析飞参数据来及时发现飞行员操纵、发动机的状态等方面可能存在的问题[4],从飞参数据角度分析飞行训练过程中的不足,在此基础上对训练提出改进的意见,从而帮助飞行学员更好地提高飞行技能[5]。
1 飞参数据的构成及分类
Garmin系统在国内的应用越来越普遍,例如中航通用飞机公司设计研究院2010年研发的某型飞机配置了GARMIN公司的G1000系统,这也是G1000系统在国内研发飞机型号上的首次安装[6],其驾驶舱如图1所示。

图1 G1000系统在某国产飞机上的布置图
Garmin1000系统记录的飞参数据有60多种[7],对这些数据进行分类能够让更清楚地认识和应用飞参数据,因此了解飞参数据的构成和分类很有必要。将飞行参数的数据分为飞行环境参数、飞行状态参数、发动机参数和通信导航参数4类。表1列出了其中重要的飞参数据。
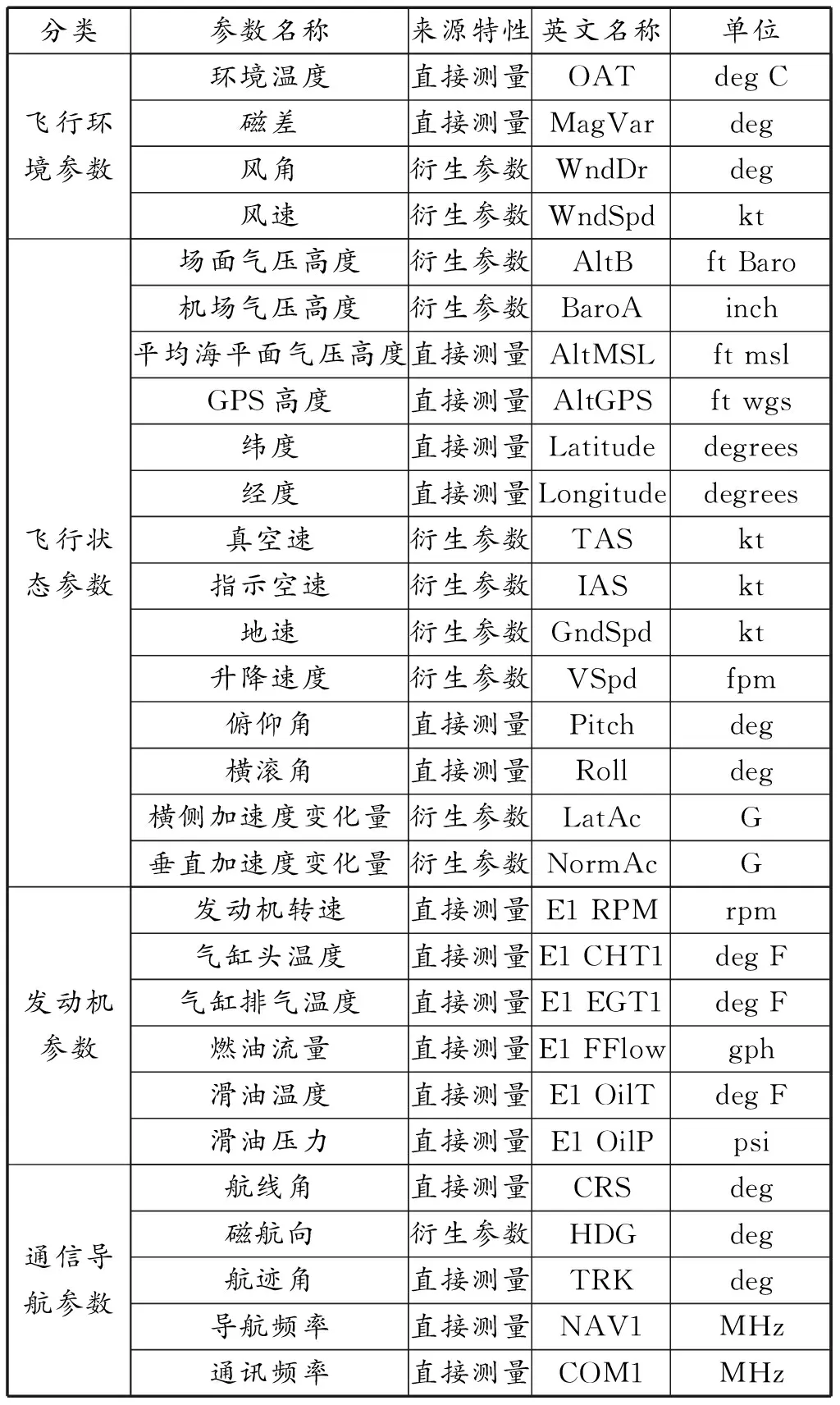
表1 飞参数据
1.1 飞行环境参数
大气参数指与大气环境相关的参数,它反映了飞机所处的环境状况[8],是飞机运行的外部条件。在飞参数据中,环境温度、磁差、风向、风速为飞行环境参数类别。
1.2 飞行状态参数
飞机在空中飞行过程中有不同的飞行状态。飞行状态参数包含飞机的姿态变化数据以及飞行速度、高度等状态变化的数据。在飞参数据中,场面气压高度、机场气压高度、修正海平面气压高度、GPS高度、纬度、经度、指示空速、地速、升降速度、姿态角、坡度、横侧加速度变化量、垂直加速度变化量为飞行状态参数[9]。
飞机飞行过程中会使用不同的高度,机场区域用修正海平面气压作为飞机的高度表拨正值。在航线飞行阶段,则用标准气压高度作为高度计修正值,这样能简化飞行程序,确保飞机间的安全间隔。
在飞行状态参数的几个高度中,修正海平面气压高度用于进近、起飞、着陆阶段,对于终端区、越障、所有机场都方便使用。场面气压高度用于进近、起飞、着陆阶段,方便判断飞机距跑道的真实高度。标准海平面气压高度用于航线、高原机场起降,对航线飞行气压基准的统一很重要,但起飞着陆阶段不如用修正海压高度方便。GPS高度则用于指示飞机飞行的绝对高度。
在加速度变化量中,橫侧加速度变化量用于判断飞机着陆过程中是否偏侧接地。垂直加速度变化量在飞机训练过程中用于监控飞机的动作是否粗猛的重要参考。
1.3 发动机参数
发动机是飞行的动力来源,发动机参数代表着发动机的工作状况[10],在Garmin系统记录的飞参数据中,发动机参数有发动机转速、气缸头温度、气缸排气温度、燃油流量、滑油温度。
其中燃油流量代表着燃油消耗率,也就是飞机每小时消耗的燃油量。滑油温度是反映飞机是否过热的重要参考。
1.4 通信导航参数
飞机的通信与导航系统能够保证飞机与地面以及飞机之间的相互通信,能够知道飞机的位置并引导飞机按预定航线飞行。通信导航参数反映飞机的位置及方向信息,通信导航参数有航线角、磁航向、航迹角、导航频率、通信频率。
飞机在不同的飞行阶段会使用不同的通信频率,在本场飞行阶段是调到本场的飞行频率,进近阶段调进近频率,起飞着陆本场飞行调的是塔台频率,航线飞行时调的是航路频率,通过频率的特性可以简单地识别飞机飞行的科目类别。
2 飞参数据的来源特性
飞参数据记录系统实时记录了大量的飞机运行过程中的参数[11],这些参数的来源是不同的,根据飞参数据能否通过直接测量得到将飞参数据分为直接测量参数和衍生参数两大类。
2.1 直接测量参数
在机载飞参数据中,有一部分数据是通过飞机的传感器、系统设备直接测量得出的,这部分数据为直接测量数据。直接测量数据有环境温度、俯仰角、横滚角、燃油流量、滑油温度、滑油压力、发动机转速、气缸头温度、气缸排气温度、导航频率、通信频率、航线角、磁差、航迹角、GPS高度、经度、纬度。
2.2 衍生参数
衍生参数是指通过公式计算得出的参数,不能通过传感器直接测量得到。衍生参数之间相互关联,这意味着某一个参数不可用时,可以由其他的参数通过计算公式推导出来。下面是本文中涉及的部分衍生参数的介绍及计算公式。飞机过载是指作用在飞机上的空气动力和发动机推力的合力与飞机重力的比值。飞机所能承受的过载是衡量飞机机动性的一个重要指标。过载越大,飞机受力越大。过载大于1,飞行员机动飞行超重,过载小于1,则为失重。升降速率与过载的关系式为
Vy2=Vy1+(ny-1)gΔt
(1)
式中:ny为法向过载;g取9.807 m/s2;Vy1、Vy2分别代表Δt前后的升降速率,m/s。飞机相对于地面的运动等于飞机相对于空气和相对于地面的运动的矢量和[12],如图2所示。所以真空速(TAS)、风速(WS)、地速(GS)的关系为
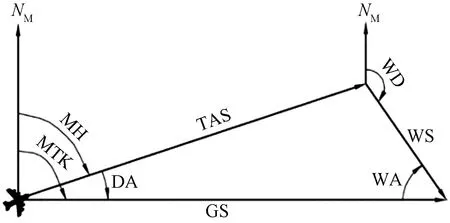
图2 航行速度三角形
DA=MTK-MH
(2)
(3)
(4)
校准空速(CAS)是通过总压(pt)和静压(ps)的差值获得的。这个差值就是动压(q)。
CAS=f(pt-ps)=f(q)
(5)
真空速(TAS)是飞机在与该气团相关的参考运动系统中的速度,即飞机在气流中的速度。它可以通过使用空气密度(ρ)和可压缩性校正值(K)从CAS获得。
(6)
Garmin1000系统由厂家提供技术支持,每5年更新一次磁差。计算某地当年的磁差时,先按等磁差曲线查取磁差,然后根据等磁差曲线值的年份和图表图例上标注的磁差年率进行校正,计算公式为
Var航行年份=Var测定+年差×(航行年份-
测定年份)
(7)
在飞参数据中,衍生参数是相互关联的,当某一个参数不可用时可以通过其他的参数计算得出。例如速度有空速、地速、表速、GPS速度,需要根据不同的环境去选择使用的速度。另外各个参数之间是有关联性的,当某一种数据出现缺失或者品质不可靠时,可以使用其他关联的数据通过计算公式来推导。以小型教练机为例,用法向过载数据判断飞机是否重着陆,双轮接地时,法向过载大于1.5g时飞机过载,当用法向过载不好判断时,可以通过升降速率的变化去判断飞机是否过载,当着陆阶段下降速率超过325 ft/min时,认为飞机发生过载。当飞机以一定的滚转角接地时,可以通过侧向加速度判断飞机是否过载。
3 飞参数据品质特性
教练机出于成本考虑,传感器少,机载设备不够先进,采样间隔大,导致数据品质不好。飞参数据的品质对飞行训练、状态监控以及维修都有着重要的影响,然而在飞机的运行过程中,飞参数据记录系统会由于无线电的干扰或者传感器在数据传输中受其他因素的干扰,从而产生野值和波动。另外,采样间隔也影响着飞参数据的质量。
3.1 野值
野值又称作异常值,在飞行数据中,少数数据点严重偏离大多数数据的趋势,而这少数数据点就叫作野值。野值的形成有两个原因,一是设备的无线电干扰,由于飞参数据为电磁脉冲数据,在设备的记录过程中突然受到异常的电磁脉冲干扰时,会出现野值,二是与设备有关,由于设备的原因产生数据漂移。因此在使用飞参数据前可以用基于卡方检验法以及新息对量测数据进行判别的方法对野值进行识别、剔除,以便于更好地在这些数据的基础上进行研究[13]。
3.2 数据波动
数据波动指飞机运行过程中,飞参数据系统记录的数据与飞机实际运行的数据有明显的偏差,与实际运行比较有上下波动,比如显示的高度、速度、升降速率等参数存在偏离曲线的趋势,这些飞参数据某一段时刻是上下波动的,导致曲线不平滑。例如在飞机上驻停时,理论上飞参数据不会变化,这些数据因为无线电、电磁干扰等产生了波动。因此在使用飞参数据之前要通过滤波去掉高频的干扰,不能直接使用这些飞行数据。
在飞行过程中,受外界环境因素的干扰,采样的数据会出现波动的情况,导致数据品质不高,在使用数据前,可以用模式识别与神经网络方法对曲线进行平滑处理[14]。图3圈出部分是飞机驻停状态下,气压高度和指示空速曲线的数据波动以及野值。

图3 数据的波动及野值
3.3 采样间隔
飞机的运行过程是连续的,而飞参数据的记录与采样间隔有关,采样间隔越小,记录的数据越接近于真实的飞行状态,得到的结果准确度也就越高。系统记录数据的刷新频率越高,数据的精确度就越高,在运用这些数据进行分析时就越能反映飞机的真实状态;如果刷新频率低,某些关键时刻的数据就容易遗漏,依据此数据进行分析的结果就不准确。
Garmin系统数据采样频率为1 Hz,这对于操纵动作的精确分析尤其是起飞着陆阶段的飞行操纵的特征分析是不够的。如C172R机型着陆接地速度约为29 m/s,在判断飞机着陆接地点时,如果采样间隔为1 s,29 m的距离就无法按照考试标准进行准确的判定。另外,在根据过载诊断飞机重着陆事件时,如果接地刚好发生在航电系统采集数据的2 s之间,则系统记录的就是着陆接地前和接地后的过载,实际的接地过载信息就丢失了,从而有可能导致无法有效监控飞行中的超限事件,如图4所示。
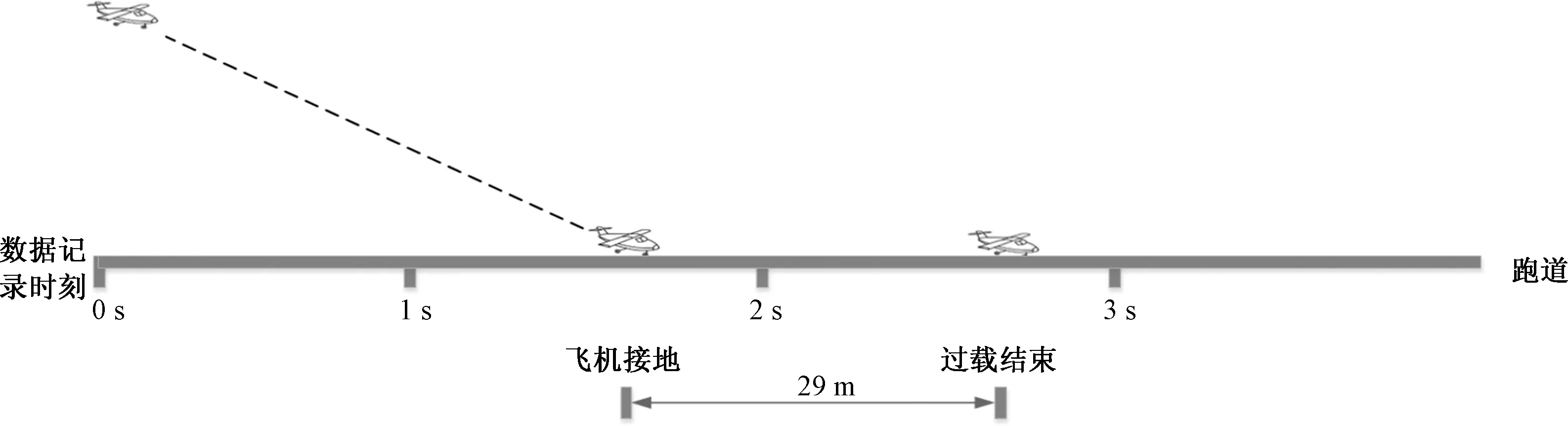
图4 采样频率对接地点判断的影响
3.4 数据的应用
飞参数据是用来评价飞行训练品质超限事件分析的一个重要依据,通过前文的分析来看数据品质有以下3个特点:①有野值;②数据波动;③数据采样间隔比较大。这3个特点导致飞参数据的品质不够好,所以直接将飞参数据用于分析是不准确的,它存在一定的缺陷。因此需要对数据进行组合处理,找到数据的组合特征,根据特征对飞行品质进行分析。例如判断接地点时,由于数据采样间隔只有1 s,无法准确地判断飞机的接地点。要准确地判断接地点,就必须根据数据的变化趋势,通过过载、速度以及高度的变化等几个参数的组合推导出接地点的位置。
另外,在超限事件里对飞机重着陆的判断中,单一地依靠过载去判断飞机是否重着陆是不合适的。可以利用前文介绍的升降速率与过载的关系来判断飞机接地,通过升降速率与过载两个参数组合的变化去判断飞机是否重着陆。用单一的参数去判断不能得到准确的结论,通过几个参数组合变化趋势的判断综合地分析判断。
综上所述,Garmin系统飞参数据对于飞行品质监控来说是一个非常重要的数据资源,目前这个数据广泛应用于飞行训练的品质评价、飞行中不安全事件的筛查以及对飞机技术状态进行监控从而及时发现飞机的隐患。在工程应用时需对数据预处理,剔除野值并对波动数据平滑处理,提升数据品质和可用性。
4 结语
对飞参数据的构成和特性做了比较全面的分析,表明了数据的重要性和价值,在应用数据进行分析的时候还应注意数据的预处理问题,本文对处理飞参数据的方法也做了一定的介绍,飞参数据处理方面也是有待进一步研究的内容。
