ABB机器人码垛编程优化仿真设计
2021-10-28王建菊
王建菊
(武昌职业学院,湖北 武汉 430202)
近年来,工业机器人行业迅猛发展,机器人应用研究也非常广泛。目前,机器人在焊接、码垛、喷涂等领域得到广泛应用[1],以机器人代替人工作业的方式不但能够极大地提高工厂的生产效率,更能帮助企业降低成本。其中,当前在物流搬运行业,机器人码垛应用广泛。基于此,针对不同物料尺寸、产品不同摆放方式,提出一种码垛程序编写方法,并在RobotStudio上仿真调试,最后完成产品的摆放,为码垛机器人完成产品摆放提供工程实用价值。
1 码垛工艺结构
在实际应用中,货物的摆放方式是多种多样的,货物的尺寸、形状都会影响到垛型的设置和码垛的方式。以往的码垛工艺是通过示教的方式生成垛型,但是示教的方式很烦琐,花费时间比较多。因此,笔者设计了三种不同的摆放形式,通过选择对应的工艺号码按钮确定对应的工艺,然后根据规划的轨迹完成物品在垛盘中的摆放,并对码垛程序进行优化及虚拟仿真调试,验证了程序的正确性,提高了垛型数据的利用率,减少了示教时间和复杂度[2]。
2 码垛工具建立
在RobotStudio仿真软件上新建吸盘工具。吸盘工具由圆柱体、长方体和圆锥体组成,圆柱体尺寸为25 mm、50 mm、10 mm,长方体尺寸为100 mm、50 mm、20 mm,圆锥体尺寸为20 mm、10 mm。通过部件、位置、放置、捕捉长方体中心点,将长方体放置在圆柱体之上。圆锥体通过映射、YZ面镜像放置在长方体之上。将三个物件通过部件结合,形成吸盘整体。
通过创建工具新建吸盘TCP中心点和负载数据,TCP中心点通过中心点捕捉,即X、Y轴偏移0,Z轴偏移40 mm。负载数据:工具质量为1 kg,重心通过长方体中心点捕捉,将吸盘工具拖至机器人本体,吸盘工具如图1所示。
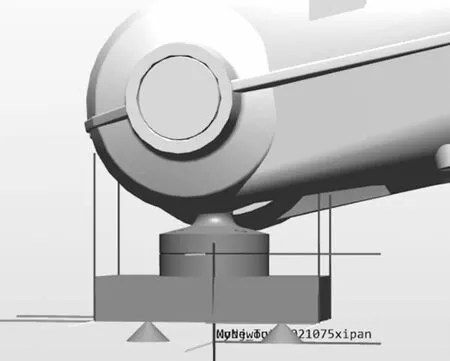
图1 吸盘工具
3 码垛编程优化
码垛信号包括吸盘输出信号do_xipan、三个工艺按钮di1_gy1、di2_gy2、di3_gy3,启动按钮di4_start、托盘更换按钮di5_ChangePallent、产品检测开关di6_PartDetect。工艺1、工艺2、工艺3分别对应3*3*3、3*3*2、2*2*3三种位置摆放形式。码垛程序主要包括演算指令、运动指令、IO指令、控制指令。演算指令完成剁满剁空、状态设置、工艺摆放信号与工艺号码的转换、垛型XYZ三个方向物件摆放个数设置。运动指令完成物件抓取、释放轨迹的规划,IO指令控制气泵的开关通断,控制指令控制码垛程序流程[3]。本设计可以根据实际更改物件尺寸,并根据选择的工艺号码进行三种不同形式的位置摆放,在main程序中调用各个子例行程序,码垛程序主要包括主程序、工艺选择程序、获取托盘位置摆放信息程序、抓件程序、放件程序、托盘程序。
主程序main完成调用工艺选择程序、获取托盘位置摆放信息程序、抓件程序、放件程序、托盘程序等例行程序。rChooseProcess工艺选择程序完成三种工艺流程的选择,将工艺按钮变为工艺号码。rGetpallentmess程序将工艺号码变成托盘位置信息,rPallent例行程序完成托盘位置的摆放,rPickPart为抓件程序,rPutPart为放件程序。码垛优化程序如下:PROCmain()



其中,产品尺寸长宽高为65 mm、65 mm、30 mm,XYZ为其方向的偏移值,实现产品尺寸可以实时更改的问题。nX、nY、nZ为每个方向放置的产品个数,选择不同的工艺号nActiveNum,nX、nY、nZ取值不同,实现三种不同的摆放方式,即针对不同垛型摆放位置不一样,满足垛型多样性问题。
4 码垛程序仿真调试
通过仿真监控程序执行结果,按下工艺选择按钮,按下启动开关di4_Start,当产品检测信号di6_Partdetect检测信号检测到产品时,机器人开始抓件和取件操作,直至完成工艺1。按下托盘切换信号di5_changePallent,重新选择工艺,进行下一工艺的产品摆放,仿真结果如图2所示。仿真结果满足码垛工艺流程,验证了程序的正确性,提高了垛型数据的利用率,减少了示教时间和复杂度[4]。
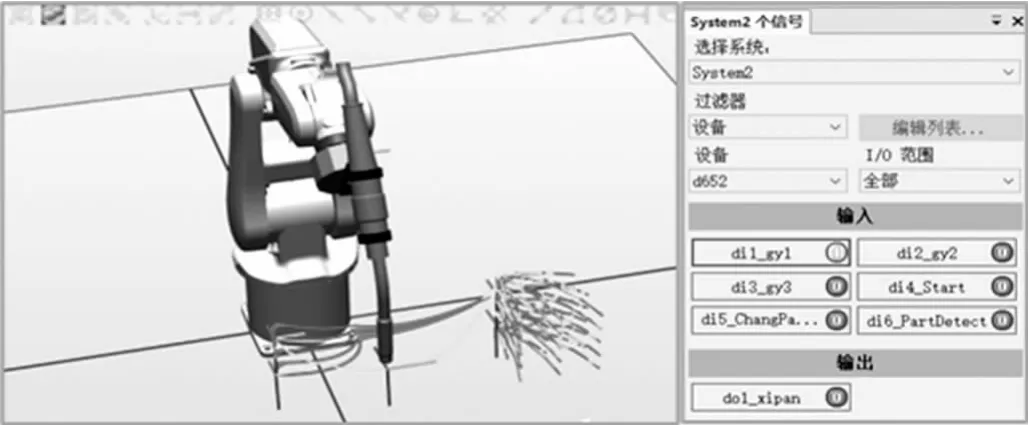
图2 码垛程序仿真结果
5 结束语
通过优化码垛程序,提出针对产品尺寸和工艺号码,完成产品的不同摆放形式,实验结果可行。与传统的在线示教相比,优化的码垛程序能够有效降低用户工作量,对不同垛型和不同产品尺寸有更好的适用性。