基于无锁相环的虚拟同步发电机离并网切换控制策略研究*
2021-10-23耿昊翔王维俊张国平米红菊
耿昊翔, 王维俊, 唐 帅, 张国平, 米红菊
(1.陆军勤务学院 军事设施系,重庆 430000;2.军事科学院 系统工程研究院,北京 100000)
0 引 言
随着能源危机和环境污染的问题不断加剧,节能减排势在必行。“十四五”规划提出了2030年前实现碳达峰、2060年前实现碳中和的目标[1],基于化石燃料的传统发电方式会造成大量二氧化碳的排放,不利于国家战略目标的实现,基于新能源的微电网发电必将成为趋势。传统的微电网逆变器控制缺乏足够的阻尼和惯性,无法为电网电压和频率提供支撑,因此一些学者提出了虚拟同步发电机(VSG)控制技术,通过引入转动惯量和阻尼,模拟同步发电机的运行特性,提高了系统运行的稳定性[2-4]。
微电网具有离网运行和并网运行2种运行模式。根据微电网运行的需要以及大电网的故障情况需在2种运行模式之间进行切换,由于微电网逆变器在2种模式下的控制方式存在着不同,在由离网转并网的时候,电压的幅值和相位不一致可能导致并网失败,或者引起较大的电流冲击以及功率的波动,对系统的稳定性造成影响。因此,逆变器并离网的无缝切换控制对于微电网的稳定运行以及并网的电能质量至关重要,也是目前研究的热点之一。
由于dq同步旋转坐标系是目前分析同步电机运行最常用的一种坐标变换,而dq变换需要的电网电压矢量角通常需要锁相环(PLL)来获取[5],因此PLL在VSG并网中具有广泛的应用。PLL会对系统动态性能与稳态精度产生影响,许多学者不断改进PLL技术或与之相关的控制算法。
文献[6]应用了一种改进的PLL,先获取2π的余数,然后将其用作正弦函数后的PI控制器的输入以消除相位接近0或2π时的突变。文献[7]提出基于正弦波锁定器的预同步控制,采用SLL获取电网的电压幅值和相位信息,提高系统控制精度和动态性能。文献[8]基于双二阶广义积分器的PLL提出了一种控制器状态跟随的并行切换方法, 可实现PQ与VSG控制2种模式下相位和电流指令的实时跟踪,有效降低了切换时的冲击。但由于电网电气状态量偏移较大,采用连续的实时跟踪调节并不是十分有效可行,所以文献[9]提出了一种恒定差量调节方法,待PLL输出稳定值后,通过信号恒定器将该定值持续输出,然后与逆变器的输出值作差通过PI调节器进入VSG算法来实现后续的调节。
但PLL本身受电网电压波动、频率偏移、电压波形畸变等影响较大,会降低检测精度,出现偏差,甚至可能出现失锁[10]。采用相应改善措施会增加PLL时间,影响整个控制系统响应的速度。
根据上述分析,无PLL的预同步单元可以避免PLL对系统控制精度以及响应速度的影响,降低控制系统的复杂度。因此,本文采用基于无PLL的VSG离并网切换控制策略。
1 VSG的模型与控制
1.1 VSG的建模
本文中VSG采用三相电压源型逆变器结构,其拓扑图如图1所示。逆变器直流侧由分布式电源提供直流电压,经开关管进行逆变并通过RLC后,输出三相正弦电压,可并网接入电网或离网接入本地负载。

图1 VSG拓扑图
控制部分由功率环及电压电流控制环组成,经功率环与参考电压计算出机端指令电压后,通过电压电流控制环,经空间矢量脉宽调制得到PWM波,从而控制开关管的通断,达到调节输出电压的目的。
1.2 VSG控制算法
1.2.1P-F控制
根据同步发电机转子运动方程式:

(1)
式中:J为转动惯量;Tm为机械转矩;Te为电磁转矩;Kp为阻尼系数;ω为角频率;ω0为额定角频率;Pm为虚拟输入机械功率;Pe为虚拟输出电磁功率;Δω=ω-ω0。
同步发电机通过调速器对输入功率进行控制,采用有功频率下垂控制,即根据电网频率来改变有功功率,这一特性可表示为
Pm=Pref+kp(ωref-ω)
(2)
式中:Pref为参考输入机械功率;kp为有功功率下垂控制系数;ωref为角频率参考值。
令ωref=ω0。两式联立可得:

(3)
其中,Dp=kp+Kpω。
VSG有功调频控制如图2所示。
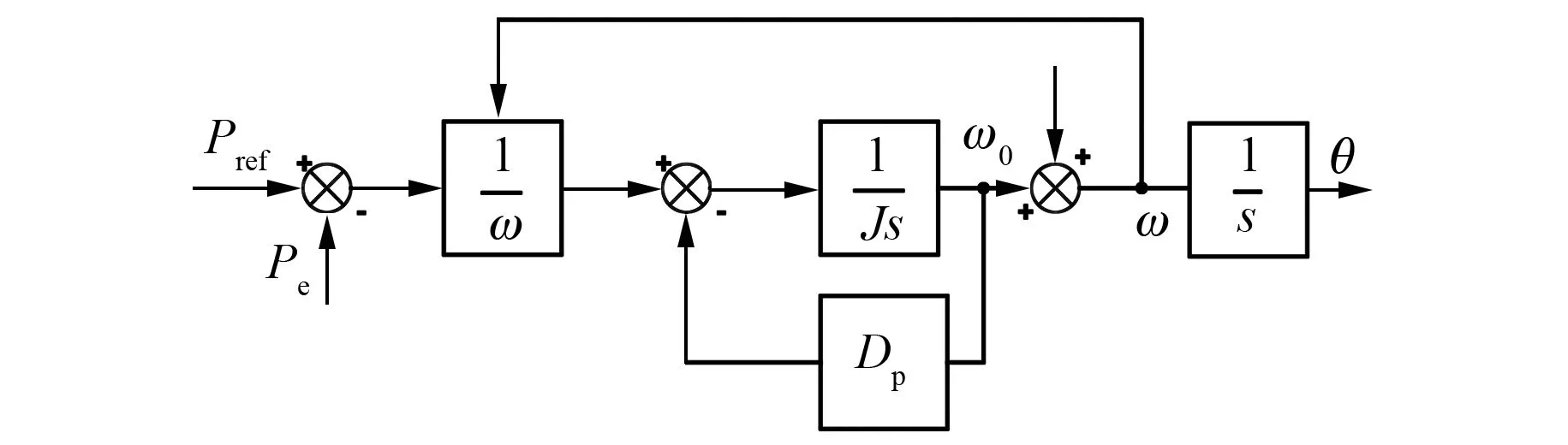
图2 有功功率控制框图
1.2.2Q-U控制
VSG通过虚拟励磁调节器控制励磁电流来改变感应电动势,从而调节逆变器的输出的无功功率。感应电动势在励磁控制的作用下,将随着输出无功功率的增大而减小。VSG无功调压控制方程可表示为
Us=Uref+Dq(Qref-Qe)
(4)
式中:Us为指令电压值;Uref为参考电压值;Qref为参考无功功率;Dq为无功功率下垂控制系数;Qe为输出的无功功率。
VSG无功调压控制如图3所示。

图3 无功功率控制框图
1.2.3 电压电流双闭环控制

本文采用PR控制,因为PI控制无法对正弦量实现无静差控制,而PR控制可最大限度的消除目标值与被控制量之间存在的静差。理想的PR控制器在基波频率处有一无穷增益,其传递函数如下:
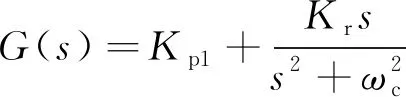
(5)
式中:Kp1为PR控制的比例系数;Kr为谐振系数;ωc为谐振角频率。
但理想的PR控制器现实中难以实现,且在非基频处的增益很小,当电网频率发生偏移时,无法有效抑制谐波。为了提高带宽,且易于通过数字、模拟器件实现,采用准PR控制器,其传递函数如下:

(6)
电压电流双闭环的控制框图如图4所示。

图4 电压电流环控制框图
2 VSG离并网控制策略
2.1 VSG的并网模型
VSG的等效并网电路如图5所示。
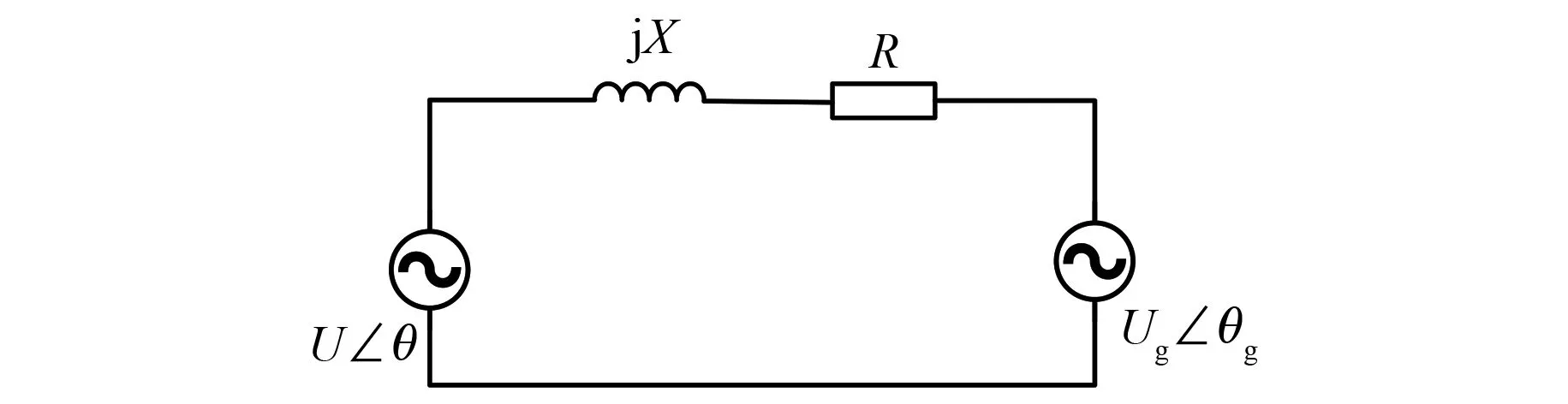
图5 VSG并网等效电路图
VSG输出电压为U∠θ,电网电压为Ug∠θg,传输阻抗为R+jX,由S=UI*可得复功率为

(7)
因为X≫R,所以有功功率为
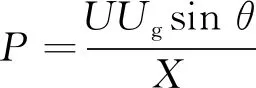
(8)
无功功率为

(9)
2.2 VSG离并网模式切换
VSG采用准同期并网的方式,在由并网切换成离网模式时,由于VSG模拟了同步发电机的机理和外特性,可以等效为一个电压源,由于有虚拟阻尼及惯性的存在,输出电压幅值、相位和频率可以保持,不会产生较大的冲击,能够实现平滑地切换。
当VSG由离网切换成并网模式时,由式(8)和式(9)可知,并网瞬间相位差会带来有功功率的冲击。由于VSG离网时输出电压和电网电压幅值相差不大,此处假设U=Ug,对两者作差得:
ΔU=Ugsin(ωgt+θg)-Usin(ωt+θ)=

(10)
由式(10)可知,电压相位的不一致会导致VSG输出电压以及电网电压之间产生最大值为2U的电压差,由于线路阻抗值较小,会产生较大的冲击电流,造成电力电子器件的损坏。因此,在切换时,要进行预同步控制,使逆变器输出电压与电网电压的幅值、相位一致,满足并网要求。
2.3 预同步控制策略
预同步控制一般包括相位预同步和电压预同步,通过对逆变器的相角和电压进行补偿,从而使VSG输出电压和电网电压一致。相位预同步控制的预同步向量图如图6所示。

图6 预同步向量图
相位预同步原理:令Ug∠θg与d轴重合,调节逆变器的输出相位,使Ug∠θg在q轴分量等于0,此时θ=θg,完成相位的预同步控制。
由于相角在0~2π范围周期变化,因此,VSG输出电压与电网的相角差会出现符号的跳变现象,在进行PI控制时会对控制过程造成影响。因此,不直接对相角差进行PI控制,而是对角频率的差值进行控制。
此处将Δω叠加在角频率ω反馈点之后,这样Δω的注入不会影响有功下垂控制回路,也不受P-F控制回路惯性特性的影响,可以大幅加快相位跟踪误差收敛速度。
相位预同步控制框图如图7所示。

图7 相位预同步控制框图
图7中kp1为PI控制的比例系数,ki为PI控制的积分系数。
对电网电压Ug进行αβ变换,得到Ugα和Ugβ,计算得幅值与VSG输出电压幅值比较后,对差值进行PI调节,将PI调节器输出的ΔU反馈回无功功率环,使VSG输出电压的幅值逐渐与电网同步。
电压预同步控制框图如图8所示。

图8 电压预同步控制框图
对Δω、ΔU进行限幅处理,以避免电网频率和电压的大幅波动,同时还引入了积分抗饱和环节以加速调节恢复过程,2个限幅模块的取值直接影响同步调节过程。
实际并网过程中,为了使VSG输出电压和电网电压保持同步,收到预同步信号时,起动预同步控制单元。当Δω、ΔU满足条件时触发并网信号,即可实现VSG和电网的并网。当成功并网后,退出预同步控制单元。
3 仿真验证
为了验证本文所提控制策略的可行性,通过MATLAB/Simulink搭建了模型进行仿真,其相关参数如表1所示。
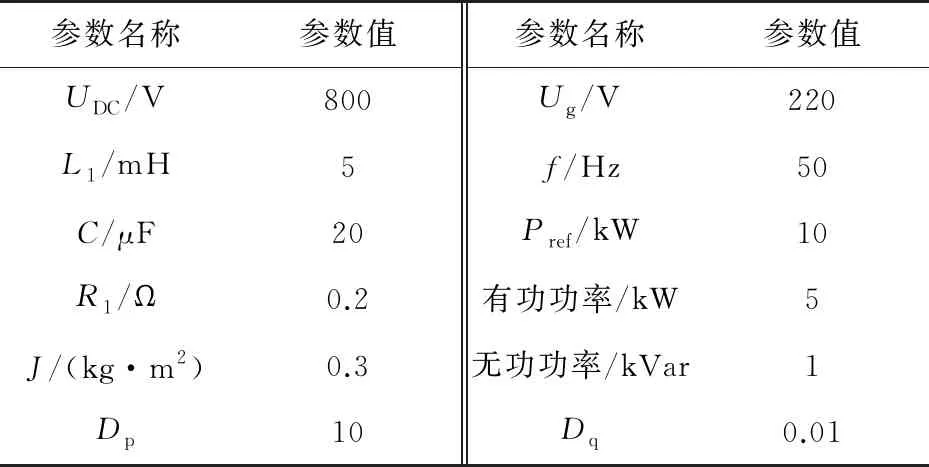
表1 仿真参数
仿真工况:初始时VSG处于离网模式,带本地负载运行,0.3 s后收到信号起动预同步控制,约0.32 s时满足并网条件,闭合并网开关,同时退出预同步控制单元,完成离网到并网的切换,VSG并网运行。图9~图12为仿真波形。

图9 输出电压波形
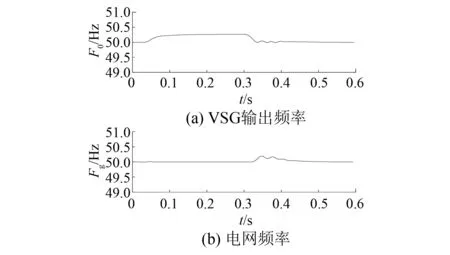
图10 输出频率波形
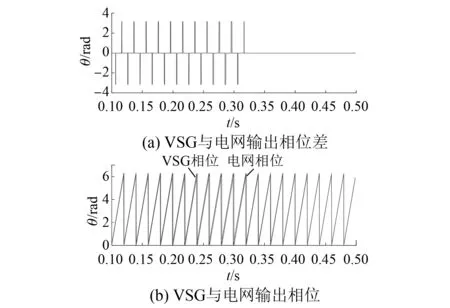
图11 输出相位波形

图12 VSG输出功率波形
由图9可以看出,在并网前后VSG的输出电压波动很小,三相正弦波形较好,未出现畸变。仅在并网瞬间有略微的波动,最大幅值约为320 V。根据GB/T29319—2012《光伏发电系统接入配电网技术规定》,定义了接入用户侧配电系统的技术标准,并网点电压在90%~110%标称电压之间时,光伏发电系统应能正常运行。电压最大波动为3.2%,满足要求。
电网电压仅在并网瞬间有轻微的波动,随后又变为稳定的三相交流电,VSG并网未对电网电压造成冲击。
由图10可以看出,在并网前后VSG的输出频率波动很小,在±0.2 Hz范围内波动,并网后能跟随电网频率保持在50 Hz。
在并网瞬间电网的频率有不超过0.2 Hz的波动,随后稳定在50 Hz运行。
由图11可以看出,在预同步信号发出后,VSG电压相位开始跟随电网,在并网前实现了同步,预同步环节用时0.02 s,在0.32 s时满足并网要求,保证了VSG并网的平滑切换。
由图12可以看出,在并网后VSG的输出功率能够跟随指令值变化且未出现较大的功率冲击。
同时在相同仿真工况下,对比传统的有PLL的控制策略,由于取消了PLL环节,简化了控制算法,预同步时间明显缩短,且并网切换时振荡更小,更加快速完成了离并网的切换。
4 结 语
本文针对微电网的运行特性,提出了一种基于无PLL的VSG离并网切换控制策略。通过取消PLL,降低了控制系统的复杂程度,避免了PLL对系统控制精度以及响应速度的影响,缩短了预同步的时间,加快完成了离并网的切换,控制算法简单的优势明显。同时,本文不采集Δθ,而是直接将Δω反馈回功率环,避免了θ相位突变带来的影响。此外,将Δω叠加在角频率ω反馈点之后,使得Δω的注入不会影响有功控制回路,也不受P-F控制回路惯性特性的影响,并引入了积分抗饱和环节以加速调节恢复过程,可以大幅加快跟踪误差收敛速度。
该控制策略能够有效地保证VSG输出电压的幅值和相位在并网前快速地追踪上电网电压,避免了在切换瞬间出现电流冲击或电压畸变,实现了平滑的切换。仿真结果验证了本文所提策略的正确性和有效性。
