潜水电机电磁噪声分析和对比*
2021-10-23徐翌翔鲍晓华朱庆龙
徐翌翔, 鲍晓华,2, 朱庆龙
(1.合肥工业大学 电气与自动化工程学院,安徽 合肥 230009;2.合肥工业大学 智能制造技术研究院,安徽 合肥 230009;3.大型潜水电泵及装备安徽省重点实验室,安徽 合肥 231131)
0 引 言
由于城市防洪排水需要,部分泵站建在城市居民区附近,潜水电机的噪声问题受到了广泛的关注。对于中小型电机,主要噪声种类为电机铁心受到电磁激振力造成的电磁振动产生的电磁噪声[1]。电磁激振力中的径向分量即径向电磁力波幅值较大,是造成电磁噪声的主要原因。当径向电磁力波的阶次与电机机械结构的模态振型一致、频率接近时,就可能产生共振现象从而导致极大的电磁噪声。
许多工作从优化气隙磁场、降低径向电磁力波的幅值出发抑制电磁噪声[2-4],或者是改变三维结构,采用斜槽、斜极等方式抵消某一阶次径向电磁力波的作用从而降低电磁噪声[5-6]。然而径向电磁力波的大小只是影响电磁噪声的一方面,改变力波的阶次和频率、避免电机机械结构产生共振也是抑制电磁噪声的有效方式。文献[7]分析了感应电机不同槽配合下产生的径向电磁力波阶次,提出了所用的槽配合应当避免产生低阶的径向电磁力波。但是感应电机的槽配合选择有限,过多槽或者过少槽的配合都会严重影响电机的效率。
目前,更高效率的永磁辅助同步磁阻电机(PMASRM)逐渐广泛应用,具有多层磁障的转子结构可以视为在转子表面等效开槽[8-9],且可采用转子表面开辅助槽的方式[10],使电机等效槽配合的选择更加灵活,降低电机的电磁噪声,并且对电机的效率影响较小。本文针对潜水电泵应用场合,分析了传统的潜水感应电机和具有多层磁障转子结构的高效潜水PMASRM的气隙磁场谐波成分,得出PMASRM转子可以产生更高空间阶次的径向电磁力波,从而避免低阶径向电磁力波与电机结构产生共振造成较大的电磁噪声。有限元仿真结果表明,潜水PMASRM不仅效率更高,并且电磁噪声水平更低。
1 径向电磁力波分析
根据Maxwell应力张量法,忽略掉影响较小的气隙磁密切向分量,电机径向电磁力密度大小为

(1)
式中:b为气隙磁密的径向分量(以下简称气隙磁密);下标ν和μ分别为定转子磁密空间阶次;μ0为真空磁导率。
径向电磁力波与电机气隙磁密密切相关。忽略饱和的影响,在感应电机中,定子磁动势和磁导在气隙中产生的谐波磁场为
bνIM=BνIMcos(ω1t-νθe-φν)=
BνIMcos(ω1t-νpθmech-φν)
(2)
转子磁动势和磁导在气隙中产生的谐波磁场为
bμIM=BμIMcos(ωμt-μθe-φμ)=

(3)
式中:BνIM和BμIM分别为ν次和μ次谐波磁密幅值;ω1和ωμ为定转子谐波电角频率;θe为电角度;p为电机极对数;θmech为机械角度;φν和φμ分别为定转子对应阶次的磁密初相位;Z2为转子槽数;s为转差率;kμ=±1、±2、…。当ν和μ等于1时即为基波磁密。
对于PMASRM,由于定子铁心和绕组形式与感应电机接近,定子磁动势和磁导在气隙中产生的谐波磁密与感应电机相同,为
bνPMA=BνPMAcos(ω1t-νθe-φν)=
BνPMAcos(ω1t-νpθmech-φν)
(4)
转子磁动势和磁导在气隙中产生的谐波磁场为
bμPMA=BμPMAcos(μω1t-μθe-φμ)=
BμPMAcos(μω1t-μpθmech-φμ)
(5)
式中:BνPMA和BμPMA分别为ν次和μ次谐波磁密幅值。
将式(2)~式(5)代入式(1),得到感应电机和PMASRM的径向电磁力波分别为

(6)

(7)
由式(6)、式(7),感应电机和PMASRM产生的径向电磁力波均可以分为由定转子谐波磁场自身造成和定转子谐波磁场相互作用造成2种类型。当ν=1时,定子自身造成的径向电磁力波即为主波磁场产生的力波;当ν≠1时,由定转子磁场谐波自身造成的径向电磁力波幅值较小或者阶次很高,在传统的解析分析中常常忽略[1]。定转子谐波磁场相互作用产生的径向电磁力波与定转子谐波磁场的空间阶次和时间频率相关。对于2种类型的电机,力波空间阶次均为(μ+ν)p和(μ-ν)p次,尽管频率有所不同,但是对于同种谐波磁场导致的径向电磁力波,频率仍然比较接近。在常用的笼型感应电机中,转子导致的气隙谐波磁密通常为转子齿谐波磁密,阶次μ=kμZ2/p+1。而在PMASRM中,μ的值与磁障的结构有关,成分较为丰富。同样地,2种电机定子结构相似,定子导致的谐波磁密通常为定子齿谐波磁密,阶次ν=kνZ1/p+1,Z1为定子槽数,kν=±1、±2、…。
为了避免造成较大的电磁噪声,应避免产生幅值较大的低阶次力波。在感应电机中,理应采用远槽配合使径向电磁力波阶次升高。然而,远槽配合会使电机的杂散损耗增加,使效率大大降低。而在PMASRM中,可以通过改变转子结构或增加磁障层数的方式让转子产生的谐波磁场空间阶次上升而不带来严重的后果,避免定转子谐波磁场相互作用产生较低阶次的径向电磁力波,起到降低电磁噪声的作用。
2 电磁场分析模型和结果
本文以55 kW的充水式潜水感应电机和具有4层、5层磁障的潜水PMASRM为例,采用有限元法分析其气隙磁场和径向电磁力波的时空特性。分析的电机模型如图1所示。电机的基本参数如表1所示。2种电机使用相同的定子和绕组方案。

表1 电机基本参数

图1 有限元仿真模型
具有多层磁障结构的转子外圆有增强机械强度的极窄的切向磁肋,常处于高度饱和状态,可认为具有等效齿槽效应。换言之,转子磁障数越多,等效的开槽数越多,转子谐波磁场的阶次越高。图2~图4分别显示了笼型直槽铜条转子感应电机和4层、5层磁障的PMASRM气隙磁密和径向电磁力波的有限元仿真结果的二维傅里叶分解。

图2 感应电机二维傅里叶分解结果
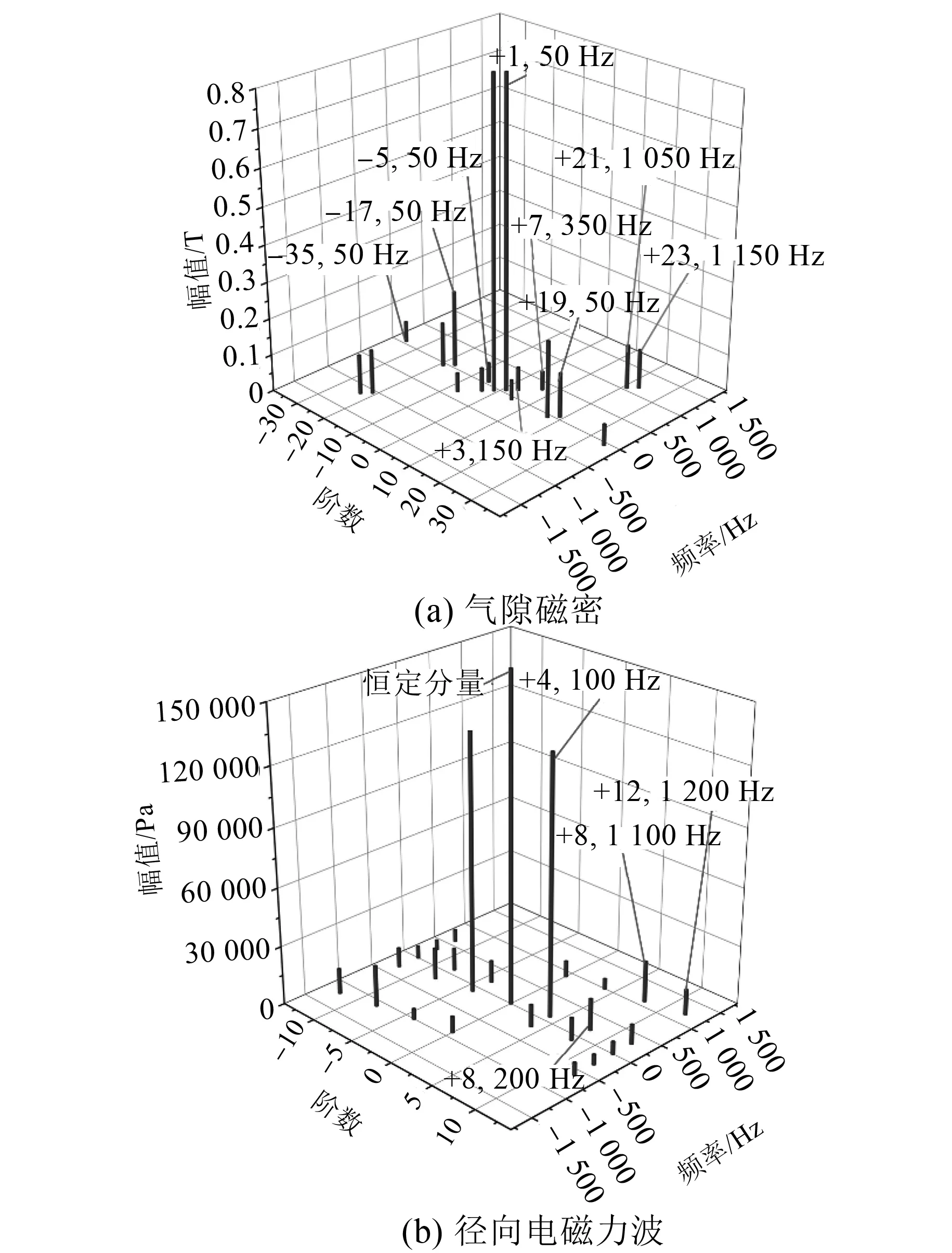
图3 4层磁障转子PMASRM二维傅里叶分解结果

图4 5层磁障转子PMASRM二维傅里叶分解结果
从以上结果可以看出,由于3种电机具有相同的定子结构和绕组形式,定子谐波磁场的阶次和频率基本一致,但转子谐波磁场的阶次和频率有较大的不同。42槽4极的感应电机笼型转子产生的一阶齿谐波为20、22次,4层磁障PMASRM转子产生的谐波磁场阶次为21、23次,5层磁障PMASRM转子产生的谐波磁场阶次为23、27次。当磁障层数较多时,PMASRM由转子产生的谐波磁场空间阶数要高于感应电机,在与定子谐波磁场相互作用时,产生的高频径向电磁力波空间阶次也相对较高。
3 模态和声学仿真结果
阶数较高的径向电磁力波产生的电磁噪声水平较低,因此具有较多层磁障的潜水在与相比潜水感应电机噪声水平可能更低。为了验证结果,在ANSYS Workbench中采用多物理场耦合有限元仿真对电磁噪声进行仿真分析。图5显示了仿真采用的简化的潜水电机结构模型和声学仿真区域。
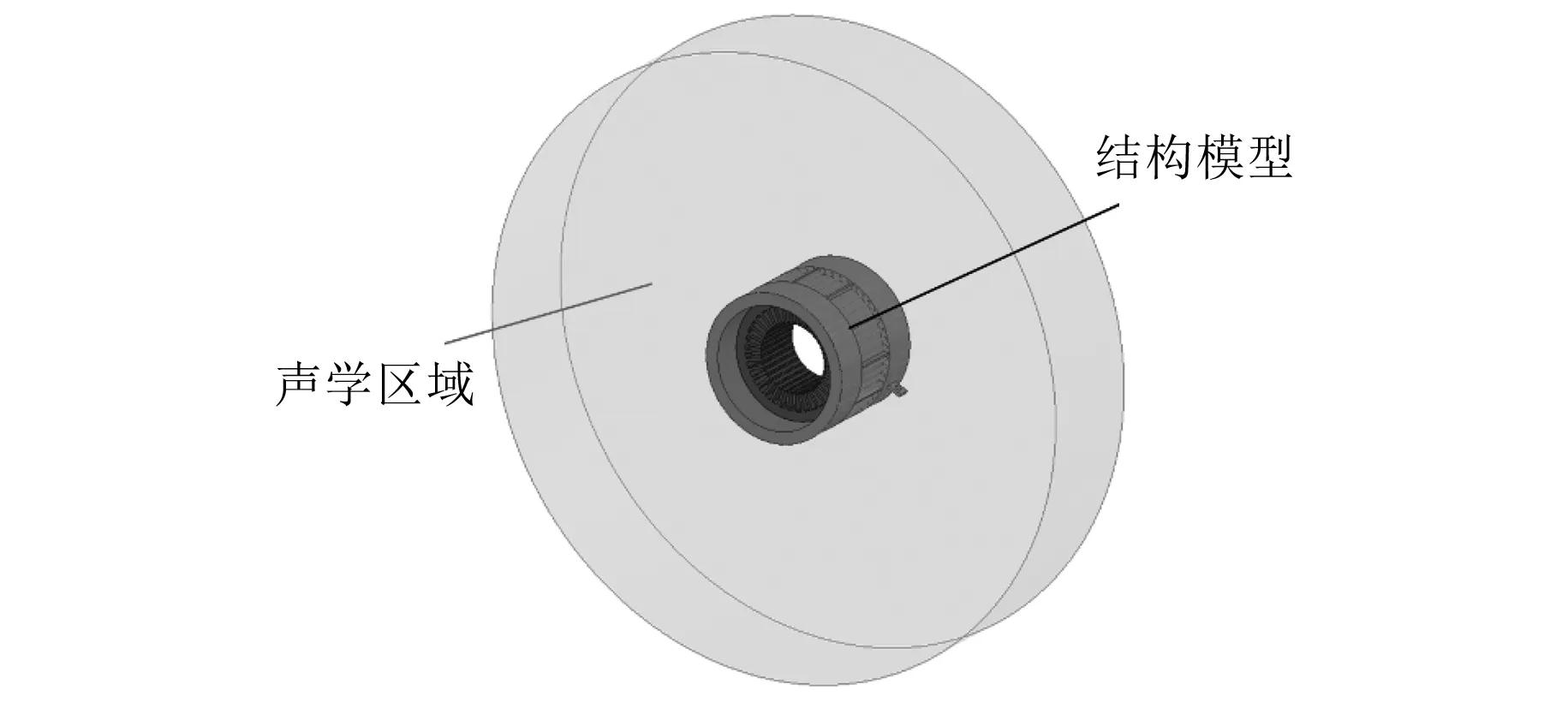
图5 结构模型和声学区域
对仿真的电机结构模型进行模态分析,主要分析5 000 Hz以下人耳较为敏感的频率区域。2对极电机径向电磁力波主要为偶数阶。电机结构模型主要的偶数阶振型如图6所示,在5 000 Hz以下的模态振型阶次较低。

图6 电机结构模型主要的偶数阶振型
选取圆柱形声学区域的最外侧面作为声学频谱分析的测试面,图7显示了3种结构转子的A计权声功率级仿真结果。感应电机各个频率下的的声功率级普遍高于PMASRM,在高频下可能产生共振现象造成极大的电磁噪声。在较多的频率点下,5层磁障比4层磁障PMASRM声功率级低,但是在某些频率下可能得到相反的结果。因为从径向电磁力波的角度来看,4层和5层磁障转子的PMASRM产生的径向电磁力波均较高,高于5 000 Hz以下仿真结构模型的主要模态振型,所以潜在的共振现象会对电机的电磁噪声产生影响。在具体应用中应当考虑实际的结构模型和安装方式,针对性地进行磁障设计。

图7 电磁噪声结果频谱
4 结 语
本文针对传统的笼型潜水感应电机和具有4层、5层磁障的潜水PMASRM分析了气隙磁密和径向电磁力波,认为PMASRM转子可以产生更高空间阶次的气隙谐波磁场,从而使径向电磁力波的阶次增加以达到降低电磁噪声的目标,弥补感应电机槽配合选取受限的不足。
多物理场有限元仿真结果表明,PMASRM的电磁噪声水平更低。将其应用于潜水电机领域,不仅可以发挥出高效率的优势,也符合环境友好型潜水装备的需求。