基于变压恒频的电梯电机软起动器谐波分析与补偿
2021-10-23张仰光
张仰光, 李 凯
(1.哈尔滨医科大学附属第四医院 房产科,黑龙江 哈尔滨 150001;2.哈尔滨工业大学 仪器科学与工程学院,黑龙江 哈尔滨 150006)
0 引 言
在医院、学校和商场等公共场所,载人电梯的有效安全运行是极为重要的,电机是电梯的核心组成部分,同步电机调速和定位指标高,在厢式客货梯中占据主要份额;感应电机以其控制简单、稳定可靠、能耗较小而成为开放式滚梯运行中的首选电机[1]。鉴于感应电机自身的结构特点,直接起动或关停大功率感应电机时,电机瞬时定子电流将会达到额定电流的5~7倍[2],长期反复直接起停电机会严重影响其运行性能甚至会对并联在同一电网上的其他用电设备产生冲击[3]。鉴于此种情况,通常采用软起动和软停车装置驱动电机可靠运行。
以医用载人滚梯为例,人员和物流呈现出潮汐式负载的特性,滚梯通常运行在轻载甚至空载的状态,此时运行效率和节能是首要考虑的目标。在这种应用要求驱使下,驱动装置的软起动器显得极为重要。通常以三相六支反并联的晶闸管作为拓扑结构的软起动器,由于晶闸管的非强制换流作用,斩波产生的电压电流谐波会给电机带来损耗并影响轿厢稳定性[3]。基于上述问题,本文建立了该装置的电路模型,采用变压恒频(VVCF),只控制电压,不调整频率的控制方式,给出了不同控制律下的定子电压和定子电流谐波幅值与相位,并据此设计了三相电力谐波补偿器,补偿结果通过计算机仿真验证,并在实际电梯运行中提供了技术保障。
1 电路理论分析
1.1 装置电路模型
VVCF感应电机控制原理如图1所示。

图1 VVCF感应电机控制原理图
忽略铁损、磁饱和以及空间谐波。单相的晶闸管驱动感应电机的电路模型可用T型等效电路来表示[4-8],如图2所示。

图2 单相的晶闸管驱动感应电机电路模型
图2的电路根据Thevenin等效原则可以转化为如图3所示的电路。

图3 单相晶闸管驱动感应电机Thevenin电路模型
由图2和图3即可获得整个电梯电机软起动器的等效电路图,如图4所示。

图4 电梯电机软起动器电路模型
图2~图4中,ui为电源电压;uo为电机端电压;Rs为定子电阻;L为等效电感;uoc为等效开路电压;e为合成端电压;is为定子电流。
1.2 电机的电压电流表达式
当ωt=α时刻,图2所示的单相电路应满足如下的电流微分方程式和初始条件[9-12]:
(1)
根据Laplace变换及其反变换解得该方程:
α≤ωt≤α+θ
(2)
式中:L为等效定子电感;is为定子电流瞬时值;Rs为等效定子电阻;Ui为输入电压有效值;ω为交流电角频率;α为晶闸管触发角;Z为负载阻抗的有效值;φ为负载的功率因数角;θ为晶闸管导通角。
根据式(1)和式(2),获得端电压有效值Uo和定子电流有效值Is表达式:

(3)

(4)
式中:Uo为端电压有效值;Is为定子电流有效值。
1.3 电压和电流谐波分析
电梯电机软起动器在三相动力电源供电下,采用VVCF模式(即f=50 Hz),由于晶闸管的非强迫换流作用,负载端电压和负载电流呈现非线性规律。以单相为例,仿真计算条件:f=50 Hz,Rs=3.1 Ω,Ls=0.096 H,Rr=1.33 Ω,Lr=4.3 H,Lm=0.090 H,UA=380 V,α=100°。波形如图5和图6所示。
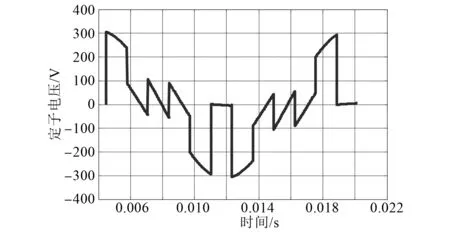
图5 触发角为100°时定子电压仿真波形

图6 触发角为100°时定子电流仿真波形
对图5和图6对其进行谐波分析,获得频率特性如图7和图8所示。

图7 触发角为100°时定子电压频率特性

图8 触发角为100°时定子电流频率特性
同样可获得α=130°的情况,其余仿真计算条件同上,计算结果如图9~图12所示。
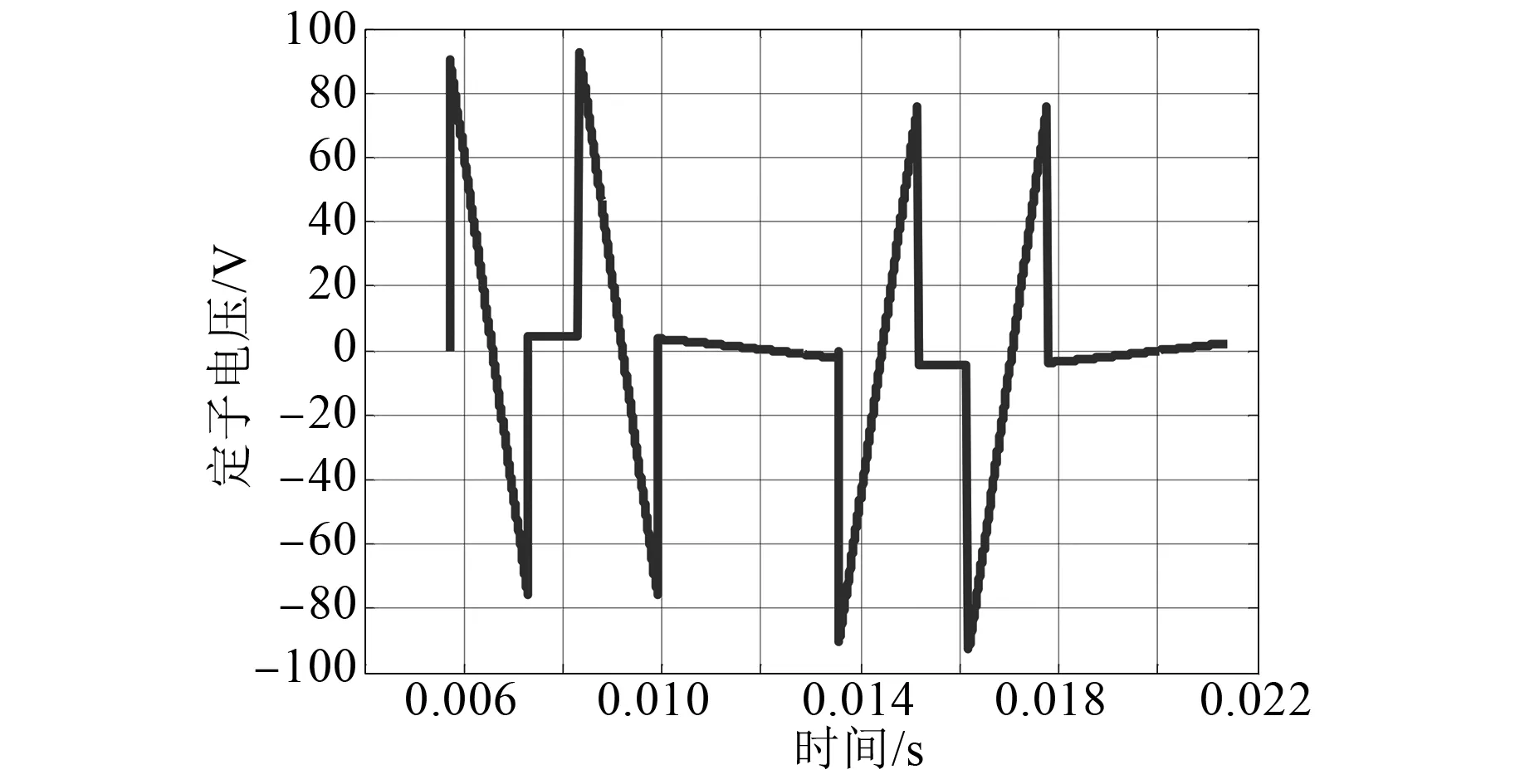
图9 触发角为130°时定子电压仿真波形
图10 触发角为130°时定子电流仿真波形
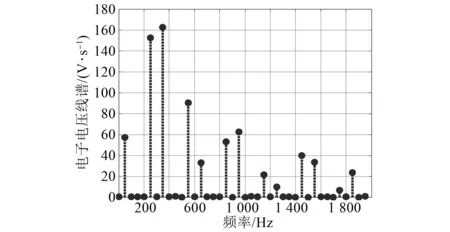
图11 触发角为130°时定子电压频率特性
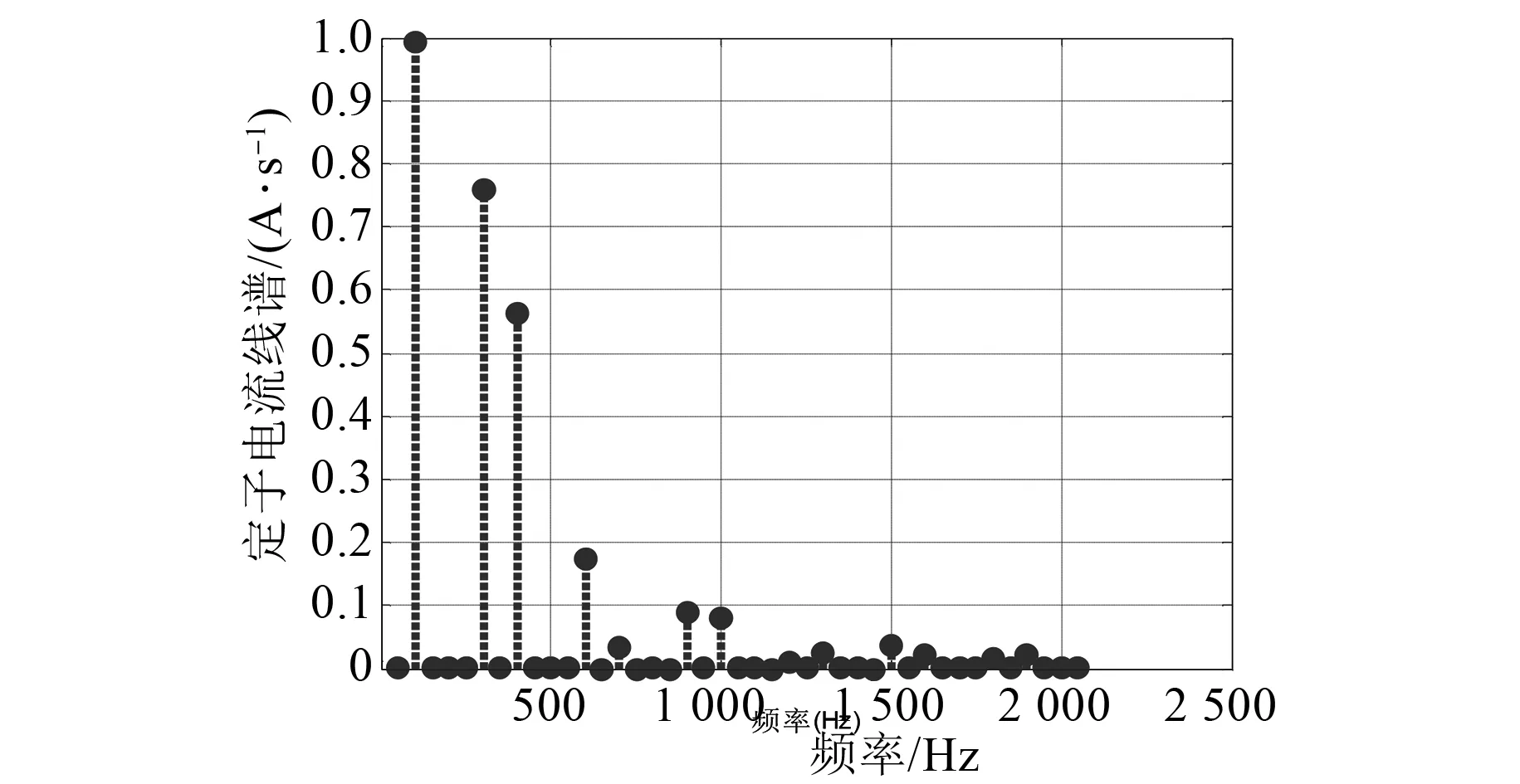
图12 触发角为130°时定子电流频率特性
图5~图12的仿真曲线中,计算条件相同,通过对频率特性图的分析可知,无论在α较大的情况还是较小的情况,uo和is的谐波分量均为6n±1次。对频率特性进行谐波分离,即可获得不同次谐波的幅值和相位。相应的计算公式如下:

(5)
(6)
式中:α0为直流分量幅值;n为谐波阶次;m为一个周期的等分数;i为采样点个数;yi为第i个采样点的测量值;αn为第n次谐波余弦分量;bn为第n次谐波正弦分量;cn为第n次谐波幅值;φn为第n次谐波相位。
在实际中选取12个采样点,简易算法如下。

(7)
2 控制方法设计
2.1 触发角为参数的控制方法
根据以上分析,选取α作为控制参数,设计递减触发角的控制算法如下:
α(k+1)=α(k)-Δα
(8)
式中:Δα为触发角增量;k为采样点数。
根据1.3节电机参数计算,可以获得触发角增量Δα的变化仿真曲线,如图13所示。

图13 触发角增量变化仿真曲线
此方法的仿真曲线如图14和图15所示。
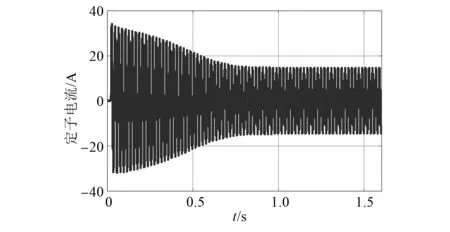
图14 触发角控制律下定子电流仿真曲线

图15 触发角控制律下输出转矩仿真曲线
电机软起动的暂态阶段(t<1 s),定子电流和输出转矩的波形,高频分量成分较多,波形振荡剧烈,波形幅值变化快。选取暂态阶段特定周期[0.004 s,0.024 s]的定子电流波形,此时触发角初始值为130°,定子电流频谱图如图16所示。
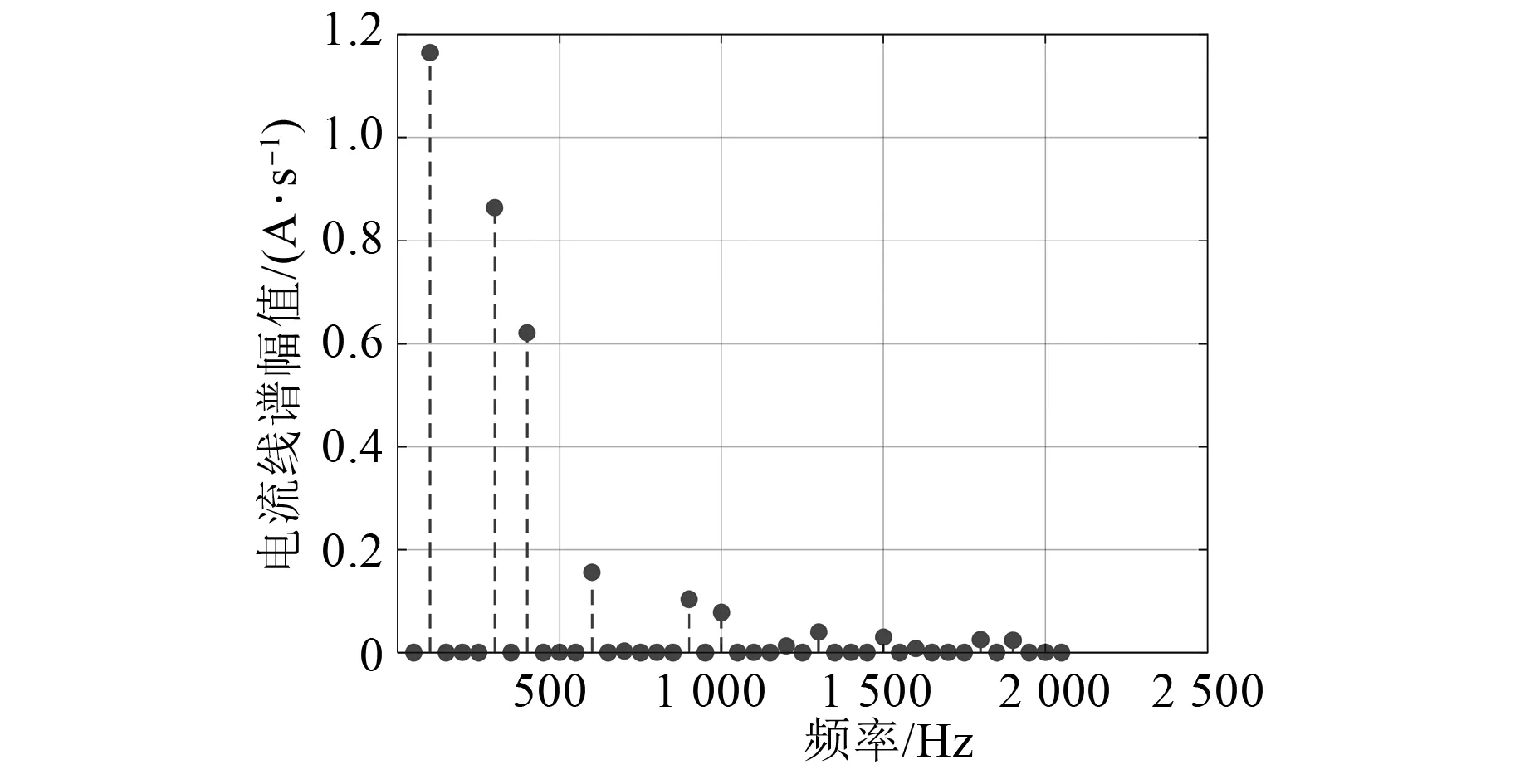
图16 触发角控制律定子电流频谱图
图16可以看出,定子电流瞬时冲击的幅值相较于额定值减小;定子电流所含高频分量多。该控制方法虽然能够实现电梯电机的软起动,但由于输出转矩的波动作用,尽管持续时间短仍会对滚梯产生“晃动”的影响,因此该算法存在一定弊端。
2.2 功率因数角为参数的控制方法
电流的谐波与负载功率因数有关,软起动算法应含有功率因数信息,本文设计了基于功率因数反馈的控制方法,如:
α(k+1)=α(k)-K[φ(k)-φ(k-1)]
(9)
式中:K取决于限定时段长度和算法收敛速度。
根据电机参数计算得到的功率因数变化仿真曲线如图17所示。

图17 功率因数角随转速变化仿真曲线
图17中,电机参数与1.3节完全相同。此算法下定子电流和输出转矩仿真曲线分别如图18和图19所示。为了进行定量分析,同样针对电机软起动暂态阶段(t<1 s),选取特定周期[0.004 s,0.024 s]的定子电流波形做频谱分析,其中触发角初始值为130°,定子电流频谱图如图20所示。

图18 功率因数角控制律下定子电流仿真曲线
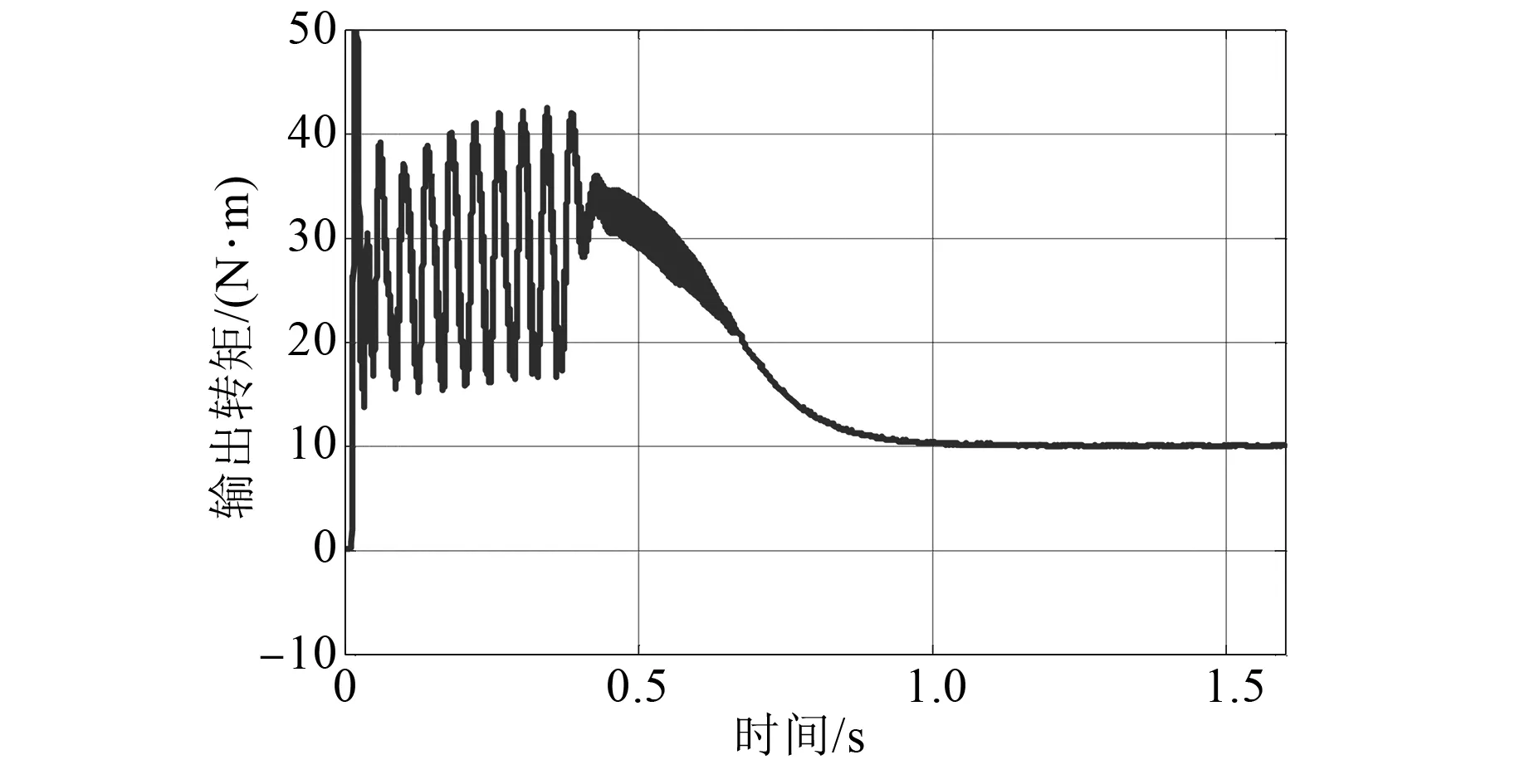
图19 功率因数角控制律下输出转矩仿真曲线
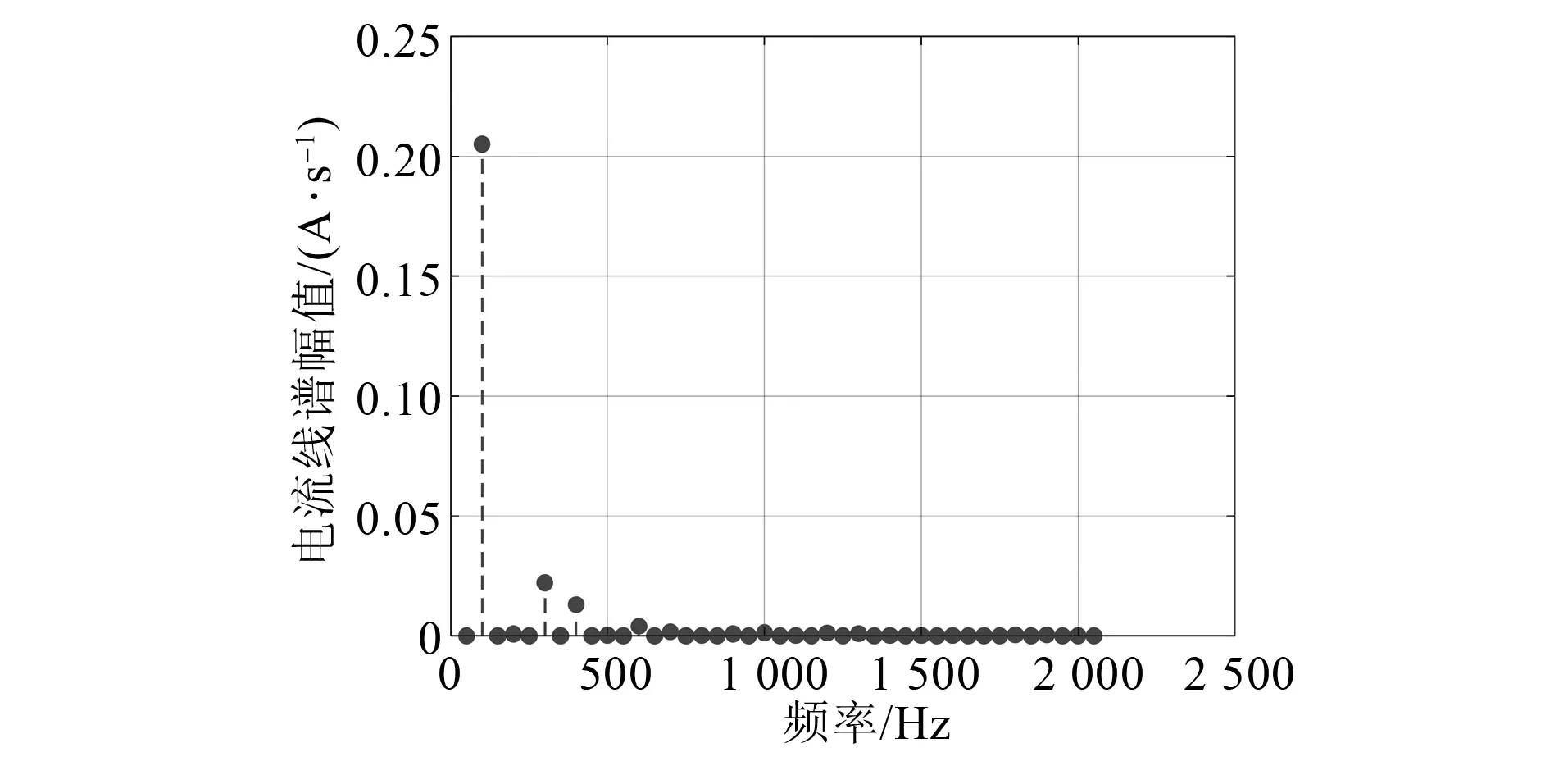
图20 功率因数角反馈控制律定子电流频谱图
图13~图20的仿真平台为MathWorks公司的MATLAB2019b,所选工具箱为Simulink中的子工具箱Simscape-Electrical Three Phase,仿真算法为系统默认算法。
图20分别与图16、图12对比,可以看出定子电流的高频分量有明显降低,说明新的控制方法有明显抑制高频谐波的作用。2种算法的定量计算结果如表1所示。
从表1中可以看出,电机额定电流为11 A,根据图16和图20的频谱图计算,2种算法的起动电流分别只占额定电流的11%和2.3%。高频分量(超过1 000 Hz)的谐波次数(各线谱幅值与基频幅值之比大于1%的个数),2种算法分别减小到40%和20%。低频分量(小于1 000 Hz)的谐波次数(各线谱幅值与基频幅值之比大于5%的个数),2种算法分别减小到25%和20%。基频幅值为线谱谐波分析中最高幅值。

表1 2种控制方法对比
3 试验研究
在整个控制过程中,功率因数角定义为实际加载到电机某一相的定子电压和同相电机定子电流的相位角差。实际控制过程中,定子电压波形的相角可以通过光耦利用触发角的关系计算得到,在同相的负载端,采用电流互感器获得定子电流的波形,并获得其相角。两者相减即为实时的功率因数角。光耦和电流互感器的响应时间为微秒级与触发角和功率因数角的毫秒级作用时间相差3个数量级,不影响最终功率因数角的计算结果,且相角算法固化于控制器中。
试验硬件为光耦MOC3023(6支),电流互感器LZZBJ9-10C(2支),晶闸管KP20A(6支),感应电机Y112M-4(1台),STM32F103C(1台)最小系统板为控制器。
试验软件为Keil-C5(1套)。
为了验证理论计算和计算机仿真的结果,以医院某型医用载人滚梯软起动器作为试验对象,分别采用2种控制方法进行了测试,试验波形分别如图21和图22所示。
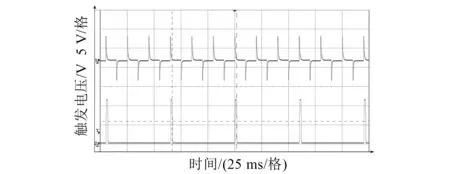
图21 触发角和功率因数角脉冲波形
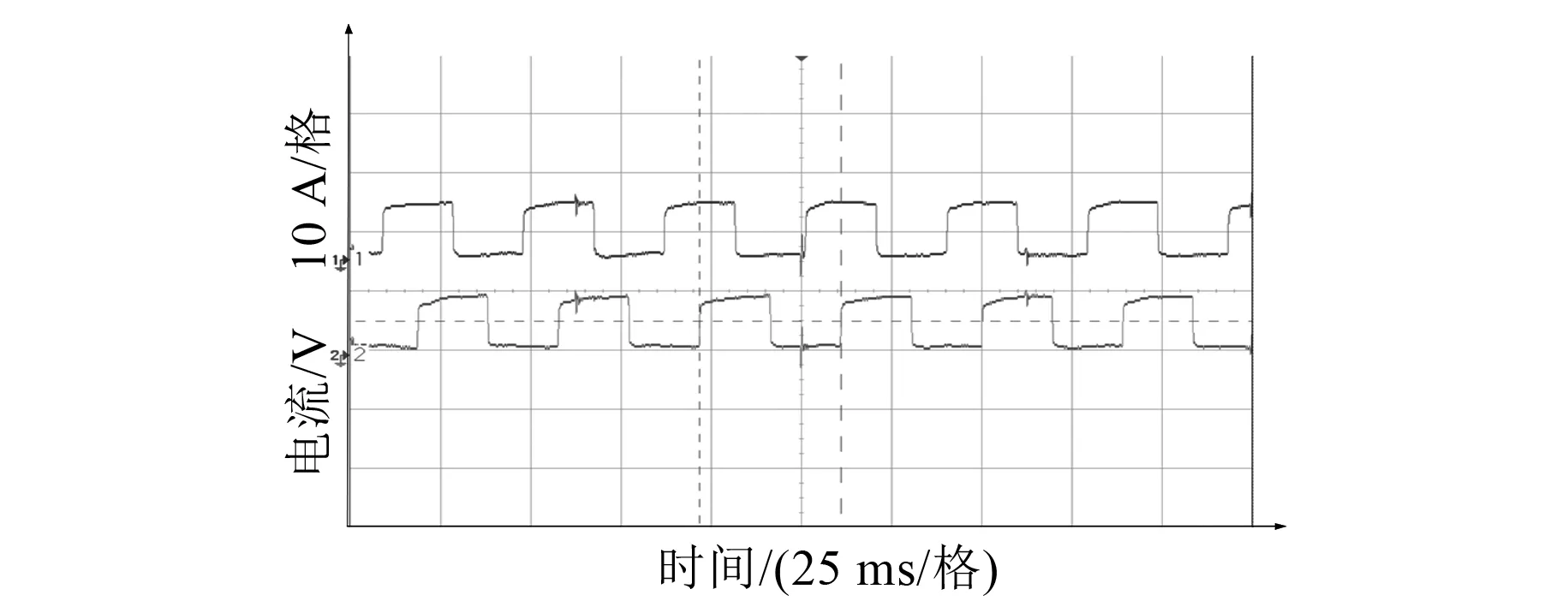
图22 电梯电机软起动器定子电流波形
图21纵轴为触发电压波形。图22纵轴为经过光耦隔离后的稳态情况下的定子电流波形,上部波形为功率因数控制法,下部波形为触发角法。可以看出2种控制方法均有效抑制了电流瞬变,尤其是在一定的起动时间内,功率因数法更优。
4 结 语
本文以电梯电机软起动器为研究对象,通过电路计算构建了系统的电路模型,采用VVCF的方式进行了计算机仿真,获得了不同条件下的定子电压和电流谐波,采用12个点的谐波分离方法获得了各次谐波的幅值与相位,分别设计了基于功率因数角和基于触发角的控制方法。仿真和试验说明功率因数角控制法可以更有效抑制谐波,从而有效维护电梯安全运行。
