带齿槽转矩补偿的横向磁通永磁电机DTC技术研究*
2021-10-23陈志辉段津津苏有成
沈 洁, 陈志辉, 段津津, 苏有成
(南京航空航天大学 自动化学院,江苏 南京 211100)
0 引 言
横向磁通永磁电机(TFPMM)是20世纪80年代由德国的Weh教授提出的新型永磁电机结构形式[1],具有转矩密度大的优点,适用于低速大转矩电驱动领域。但是,由于电机本体结构复杂,存在漏磁通大、齿槽转矩大、磁链波形畸变等问题。为了提高电机控制系统的性能,需要改善电机控制方法来改善磁链波形,抑制转矩脉动。直接转矩控制(DTC)对电机参数依赖性小,转矩响应快,较早便应用于横向磁通电机控制[2-4]。传统的DTC采用滞环结构,控制系统转矩脉动大,电流谐波大,开关频率不固定,针对这些问题,专家提出了各种改进方案。文献[5-7]分析了由于电压空间矢量的非连续性导致电机转矩脉动,提出细化磁链扇区,将原始的六扇区增加到十二扇区,并增加基本电压矢量的个数。试验验证增加磁链扇区能有效减小转矩脉动,改善磁链波形,但是合成电压矢量的方法复杂。文献[8]提出利用三电平逆变器代替传统两电平逆变器,在空间生成19个基本电压矢量,并提出新的电压矢量合成方法,在空间上合成12个均匀分布、幅值相等的电压矢量。逆变器直流侧电压利用率高,缺点是控制器成本高。文献[9-11]将电压矢量调制技术应用到DTC系统中,给定电压矢量更精确,经验证转矩脉动和电流谐波得到有效抑制,磁链控制更准确。以上方法从DTC策略的改进上来减小转矩脉动,但对于电机本体结构原因带来的齿槽转矩脉动或是因逆变器非线性带来的电磁转矩脉动则无法抑制。对于这些附加转矩脉动的抑制,主要方法有重复控制法[12-13]、电流谐波注入法[14-15]、电流前馈补偿法[16]等。文献[12]中的永磁同步电机(PMSM)带压缩机负载,负载转矩周期性变化,提出PI控制器和重复控制器并联的方法,利用重复控制器控制周期性扰动,获得良好的稳态性能。文献[14]针对轮毂电机的齿槽效应、电流谐波等原因导致的电磁转矩波动,提出在电机定子上附加三相独立绕组,针对转矩谐波,在附加绕组内注入特定频率的电流谐波抑制转矩脉动,试验验证转矩脉动减小。文献[16]在PMSM矢量控制的基础上对于空载转矩周期性脉动的现象,根据脉动规律在q轴电流上添加前馈补偿量,产生期望的电磁转矩,抵消转矩脉动,从而减小转速波动。通过仿真和试验验证了抑制方法的有效性。本文将SVPWM技术应用到DTC中,代替传统的滞环比较器部分,减小因电压矢量不准确造成的转矩脉动[17-18]。针对横向磁通电机齿槽转矩大的问题,提出补偿齿槽转矩的DTC方法。利用齿槽转矩关于转子角度呈周期性变化的特点,用MATLAB的曲线拟合工具,将齿槽转矩拟合成关于角度的解析式,反馈补偿到DTC转矩观测器输出端,使转矩观测器的输出转矩更接近电机真实转矩,利用DTC选择电压矢量抑制齿槽转矩脉动。通过对改进前后的转矩进行傅立叶分析,相比未补偿齿槽转矩的转矩脉动,补偿之后转矩脉动大大降低,验证了齿槽转矩补偿的方法能有效抑制转矩脉动,控制系统性能提高。
1 新型TFPMM数学模型及传统DTC仿真
1.1 新型TFPMM结构及数学模型
本文研究的TFPMM为轴向排列的四相结构,其中A1、A2相为一个单元结构,两相间没有气隙,相位相差180°电角度,同理,B1、B2相为一个单元结构。2个单元结构间有2 mm的空气间隙,相位相差90°电角度。TFPMM四相定转子结构如图1所示。

图1 TFPMM四相定转子结构
为了搭建四相TFPMM在两相正交坐标系下的数学模型,需要进行坐标变换,假设两相坐标系下绕组的等效匝数为N1,四相坐标系下绕组匝数均为N2,根据合成磁动势相等的原则可得:

(1)
将电流代入式(1)得:

(2)
根据前后功率不变原则:
Uαiα+Uβiβ=
UA1iA1+UA2iA2+UB1iB1+UB2iB2
(3)
得到匝数比:

(4)
可得从四相坐标系到两相坐标系的变换矩阵为
(5)
两相静止坐标系到两相旋转坐标系的变换矩阵为

(6)
四相横向磁通电机在旋转坐标系下的电压方程为

(7)
式中:Ud、Uq为电机d、q轴电压;ψd、ψq为电机d、q轴磁链;Rs为相绕组内阻;id、iq为电机d、q轴电流;ωr为电角速度;
(8)
d、q轴电感为电流和电角度的高阶表达式。新型TFPMM的齿槽转矩较大,不能忽略,因此转矩表达式由3部分构成,分别为励磁转矩、磁阻转矩和齿槽转矩:
Te=Tpf+Tr+Tcog(θ)
(9)

1.2 TFPMM传统DTC控制仿真
根据式(9)进一步计算得到:
|ψs|(Lq-Ld)sin 2δ]+Tcog(θ)
(10)
式中:Ld、Lq为dq轴电感;|ψs|为定子磁链的幅值;ψf为转子磁链;δ为定转子磁链间的夹角;p为电机极对数。
新型TFPMM的磁路呈三维结构,d轴和q轴磁路存在耦合,因此Ld和Lq均不是定值,而是会随着id和iq的变化而变化。通过有限元仿真得到的d、q轴电感与电流的关系如图2所示。
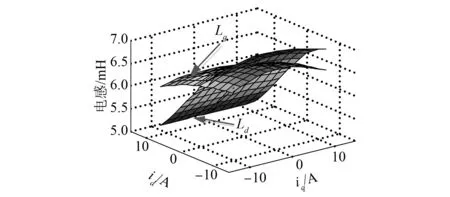
图2 不同负载工况下d、q轴电感比较
由图2可以看出,d、q轴电感会受d、q轴电流变化而变化,但是受d轴电流的影响更大。与普通凸极型永磁电机相比,新型TFPMM的d、q轴电感相差较小,磁阻转矩相较励磁转矩很小。不同电流控制角下有限元仿真的励磁转矩和磁阻转矩比较图,如图3所示。
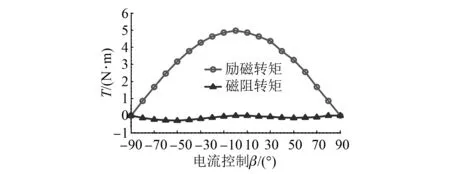
图3 不同电流控制角下励磁转矩与磁阻转矩比较图
忽略磁阻转矩的影响,主要考虑励磁转矩。励磁转矩随电流控制角呈余弦关系变化,在控制角为0°左右达到最大值。电流控制角的0°对应功率角δ在90°左右,当电机运行在功角为0°~90°时,励磁转矩随功率角的增大而增大,可以通过控制定子磁链的方向控制励磁转矩。
根据电压方程:
(11)
得到:
(12)
若忽略绕组电阻上的压降,定子磁链的变化方向将与绕组电压矢量方向一致。因此可以通过改变施加在四相绕组上的电压矢量来改变定子磁链的方向。
传统DTC算法根据测得的电压和电流计算转矩和磁链值,与给定的转矩和磁链值进行比较,经过滞环和查表模块得到电压矢量。给定转速与电机实际转速的差值经过PI调节器获得参考转矩值,通过转矩观测器计算电机的转矩值,磁链幅值通过对反电动势的积分得到。转矩误差和磁链误差通过转矩滞环和磁链滞环模块,输出转矩和磁链控制信号,再结合定子磁链位置角通过查表模块选择电压矢量,最后给出逆变器开关信号。
根据原理搭建传统DTC系统,电机的本体主要由电压方程、转矩方程和运动方程构成。由于TFPMM特殊的磁路结构,电机的转矩和磁链随电流呈高阶非线性变化,难以用解析式表示,为了建模的精确性,电机的转矩和磁链模块均由Maxwell软件对电机绕组通入不同的电流仿真得到。再将仿真得到的电流、转矩磁链值导入到MATLAB建立数据表,通过查表得到电机的转矩和磁链,具体参数按照实际电机取值,相绕组电阻为0.45 Ω。
利用MATLAB/Simulink搭建传统DTC模型。仿真设置为变步长模式,基本步长为5×10-5s,仿真时间3 s,转速环的PI参数为Kp=0.02,Ki=0.2,输出限幅最大值为20,最小值为-20。转矩滞环的环宽为0.1 N·m,磁链环的环宽设定为0.001 Wb。给定转速为电机额定转速240 r/min,给定磁链幅值0.06 Wb。负载转矩为2 N·m。仿真的四相电流、电机转速、转矩和磁链波形如图4所示。

图4 TFPMM传统DTC仿真波形
仿真结果中,以A1相为例,电流峰值为6.8 A,有效值为4.33 A。电流波形不平滑,锯齿状明显,谐波较大。磁链圆显示磁链幅值在给定幅值附近波动。转速能够很快地跟踪给定值,电机输出转矩脉动比较大,脉动幅值在2.5 N·m左右,转矩脉动随时间呈周期性变化。
2 TFPMM的SVM-DTC
2.1 TFPMM的SVM-DTC方法
传统DTC方法虽然实现简单,但是采用滞环的控制方式不可避免地造成了电机的电流谐波和转矩脉动,并且逆变器开关频率不固定。SVM-DTC是固定控制周期的改进DTC算法,根据转矩和磁链的误差实时计算下一个控制周期所需的电压矢量并通过SVPWM模块调制出所需的电压矢量。相比于传统DTC电压矢量只能从几个基本电压矢量中选择,SVM-DTC不仅可以设置逆变器的开关频率,而且可以通过调制的方式获得期望的电压矢量,从而能够更精准地控制磁链和转矩,减小电流谐波和转矩脉动。
搭建SVM-DTC系统,SVM-DTC转速环和传统DTC保持一致,通过转速环得到转矩偏差值后再通过一个PI调节器得到磁链变化的角度,然后根据给定磁链幅值与反馈值的偏差计算得到参考电压矢量。根据磁链幅值偏差计算参考电压矢量的公式为

(13)
式中:θ为上一个周期定子磁链相对于转子磁链的角度;ωs为电机旋转电角速度;Ts为逆变器开关周期。
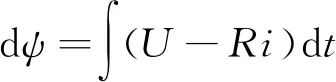
得到参考电压矢量,进行电压矢量调制。TFPMM的四相绕组相互独立,每相单独用驱动电路驱动。各相之间互差90°电角度,在空间形成8个基本电压矢量和零电压矢量,这8个基本电压矢量将空间划分为8个区域,任意区域内的电压矢量,均通过区域相邻的电压矢量分别作用一定的时间得到。
图5 基本空间电压矢量图
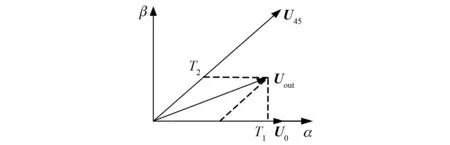
图6 第一扇区电压矢量合成图
以第一扇区的电压矢量为例,如果要得到输出电压Uout,假设α轴上的U0作用的时间为T1,相差45°角的U45作用的时间为T2,零矢量作用的时间为T0。则:
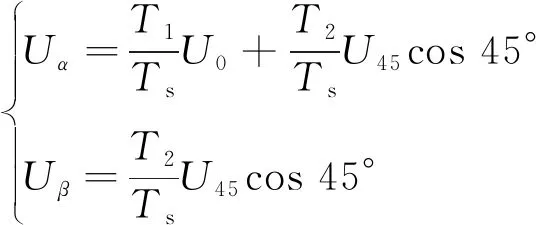
(14)
得到:
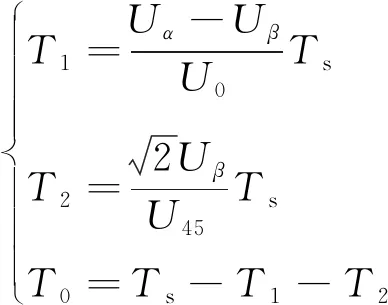
(15)
2.2 TFPMM的SVM-DTC仿真
基于MATLAB的Simulink搭建TFPMM的SVM-DTC系统。控制系统主要包括转速环、磁链和转矩计算、参考电压矢量计算模块、SVPWM调制模块、功率电路、电机等部分。设置仿真方式为定步长仿真,仿真步长为5×10-5s,仿真时间为3 s。转速环的PI参数为Kp=0.015,Ki=0.1,输出限幅最大值为20,最小值为-20。角度计算PI环的PI参数为Kp=0.7,Ki=0.5,输出限幅最大值为π/3,最小值为-π/3。电机给定转速与负载转矩情况与传统DTC一致,给定转速240 r·min-1,负载转矩为2 N·m。给定磁链幅值0.06 Wb,仿真结果如图7所示。

图7 SVM-DTC仿真波形
SVM-DTC的电机四相电流峰值为6.6 A,电流有效值为4 A,电流波形平滑,比传统DTC的电流谐波小,电流有效值更小。磁链幅值控制更精确,始终保持在给定值,只在扇区切换的地方有幅值波动现象。电机转矩脉动幅值在2.3 N·m左右,相比传统DTC转矩波形有所改善,但未从根本上抑制转矩随时间的波动问题。
3 齿槽转矩补偿的改进型DTC方案
将SVM-DTC的观测转矩和电机实际转矩进行对比如图8所示。

图8 转矩观测器输出转矩与电机输出转矩
由图8可以看出电机实际的输出转矩和转矩观测器观测转矩相差很大,电机的输出转矩除了转矩观测器输出的转矩外,还有随转子旋转的电角度呈周期性脉动的齿槽转矩。齿槽转矩与定子电流无关,只与转子角度有关,是永磁电机特有的转矩,不能被传统的转矩观测器观测出来。
为了使转矩观测器输出的转矩更接近电机的输出转矩,将Maxwell仿真得到的电机齿槽转矩利用MATLAB的曲线拟合工具拟合成关于电角度的表达式,补偿到传统转矩观测器输出端,使转矩观测器能够根据电角度计算出齿槽转矩的值,形成新的转矩观测器。DTC系统通过生成电压矢量抑制齿槽转矩脉动,以改善控制系统的性能。

图9 转矩观测器结构
根据仿真得到的齿槽转矩拟合的齿槽转矩表达式为
Tcog=0.072 55cos 2θ-0.035 75sin 2θ-
0.095cos 4θ-1.126sin 4θ+0.013 16cos 6θ-
0.09sin 6θ+0.035 1cos 8θ-0.211 6sin 8θ
(16)
式中:θ为转子转过的电角度。
拟合表达式计算得到的齿槽转矩与有限元仿真得到的的齿槽转矩对比结果如图10所示。

图10 一个电角度周期齿槽转矩和齿槽转矩拟合曲线对比图
通过电机模块输出的转子角度计算得到齿槽转矩表达式,补偿到转矩观测器输出端,得到新的转矩观测器,使用新的转矩观测器代替传统转矩观测器仿真的电流和转矩结果如图11所示。

图11 带齿槽转矩补偿的SVM-DTC电流和转矩波形
带齿槽转矩补偿的SVM-DTC四相电流峰值为6.6 A左右,电流有效值为4.3 A。转矩脉动幅值有效减小,由原来的2.3 N·m下降到了0.5 N·m左右。
对补偿前后的转矩谐波进行分析。
由图12可以看出主要为4次的转矩谐波被有效抑制,转矩谐波分量减小明显,证明了补偿算法的有效性。

图12 转矩谐波分析
4 结 语
本文研究了TFPMM的DTC技术,对比了传统DTC和 SVM-DTC的不同。验证了DTC方法可以应用于TFPMM。SVM-DTC比传统DTC对磁链的控制更精确,电流谐波小,并且转矩脉动小。针对电机齿槽转矩大的问题,提出将齿槽转矩补偿到转矩观测器转矩输出端,使DTC能够对齿槽转矩进行抑制,仿真结果验证,该方法能够有效抑制齿槽转矩脉动,齿槽转矩脉动从2.3 N·m降低到了0.5 N·m左右。通过对DTC的改进,DTC对TFPMM的控制效果得到有效改善。