基于广义位移的波形钢腹板组合箱梁有限梁段分析方法
2021-10-21周茂定蔺鹏臻张元海
周茂定 蔺鹏臻 张元海
(1甘肃农业大学土木工程系, 兰州 730070)(2兰州交通大学土木工程学院, 兰州 730070)
波形钢腹板-混凝土组合箱梁能通过钢腹板的波折形式有效提升腹板的抗屈曲性能[1].腹板的手风琴效应使其几乎不承担轴向弯矩或轴力[2],从而提高了预应力的施加效率.然而,手风琴效应与剪切变形耦合会导致结构产生较大挠曲变形,使得经典的Euler梁与Timoshenko梁理论不再适用[3].近年来,研究者们一直在寻求求解精度高且计算简便的梁单元方法.吴文清等[4]提出了拟平截面假定的简化分析方法,因能充分利用经典的Euler梁的分析理论而被广泛应用.文献[5-8]通过引入剪切附加挠曲转角来反映钢腹板的剪切变形,进而求解组合梁的挠度.学者们还提出了不同于拟平面假定的分析法,如Kato等[9]提出了一种类似于夹心梁的挠曲分析方法;聂建国等[10]将组合箱梁的挠曲变形假设为桁架与弯曲的共同作用,提出了组合箱梁挠度求解的简化分析方法.与拟平面假定下的梁理论相比,这些方法分析过程较为复杂.因此,需要建立一种既能利用Euler梁理论又能充分考虑钢腹板手风琴效应与剪切效应的梁单元模型.翼板的剪力滞效应使组合梁的挠曲求解变得更为复杂;若采用三维空间有限元方法,则会导致建模过程繁琐.基于一维梁单元的有限梁段法则能克服解析法的困难,提高建模效率,获得较为精确的分析结果.
然而,现有的梁段求解方法[11-12]大多建立在拟平截面假定基础上,并未反映腹板的手风琴效应.文献[3,13]考虑手风琴与剪切变形的耦合效应,但未计入翼板剪力滞效应.鉴于此,本文通过引入广义位移及内力,将组合箱梁的复杂挠曲变形状态解耦为经典的Euler梁挠曲、广义剪切变形引起的挠曲与剪力滞效应引起的挠曲3种状态.利用Hermite多项式建立广义位移对应的单元刚度矩阵,从而获得组合箱梁的梁段有限元分析方法.
1 组合箱梁的挠曲位移函数
受任意荷载作用的简支波形钢腹板组合箱梁示意图见图1.采用正交笛卡尔坐标系,坐标原点O位于截面形心处,x、y为横截面的形心主轴,z为梁纵轴.图中,p(z)为荷载;b1、b2分别为顶板和底板的1/2宽度;b3为悬臂板的宽度;au、al分别为截面形心到上翼板底和下翼板顶的距离;hw为钢腹板的高度;hu、hl分别为截面形心到上、下翼板形心的距离;h为上、下翼板形心之间的距离.
1.1 竖向分布
参考文献[3,8],对组合箱梁挠曲分析进行基本假设.组合梁变形满足弹性小变形假设,材料均处于线弹性范围,即忽略混凝土及钢材开裂对结构的影响.

(a) 坐标体系
令v为组合箱梁截面的竖向挠度,梁高相对于梁的挠曲曲率半径可忽略,故认为箱梁上、下翼板的挠曲转角均为v′(z).组合箱梁翼板与腹板的转角关系见图2.图中,θ(z)为上、下翼板形心连线绕x轴的转角;α(z)为上翼板底与下翼板顶位移连线绕x轴的转角.受钢腹板手风琴效应与剪切变形的耦合影响,转角α(z)与θ(z)不相等[3,13].文献[5-8]仅考虑上述变形对挠度的影响,忽略手风琴效应对应力的影响,可能导致挠曲应力分析存在误差.

图2 翼板与腹板转角关系示意图
结合图1和图2可得,上、下翼板任一点的挠曲纵向位移分别为
uu(y,z)=huθ(z)-(y+hu)v′(z)
(1)
ul(y,z)=-hlθ(z)-(y-hl)v′(z)
(2)
由式(1)和(2)可求得上翼板底与下翼板顶连线绕x轴的转角为
χθ(z)+(1-χ)v′(z)
(3)
式中,χ=h/hw.
由变形连续性条件可得波形钢腹板等效纵向位移为
uw(y,z)=-yα(z)
(4)
1.2 横向分布
作为特殊的薄壁结构,组合箱梁翼板必然存在剪力滞效应,因而挠曲纵向位移沿翼板宽度方向存在不均匀分布.由文献[14-15]可知,翼板剪力滞效应会导致梁产生挠曲转角φ(z).若用ξ(x)表示剪力滞翘曲沿翼板横向的非均匀分布函数,则翼板附加的纵向位移ug(x,z)可表示为
ug(x,z)=ξ(x)φ(z)
(5)
本文所采用的剪力滞翘曲位移分布函数为[14-15]
(6)
式中,d为满足截面自平衡的修正系数.
综合式(1)、(2)和(5),可得上、下翼板的挠曲纵向位移分别为
uu(x,y,z)=huθ(z)-(y+hu)v′(z)+ξ(x)φ(z)
(7)
ul(x,y,z)=-hlθ(z)-(y-hl)v′(z)+ξ(x)φ(z)
(8)
2 基于广义位移的挠曲分析
式(7)和(8)形式复杂,不便于工程运用,且无法区分腹板手风琴效应与剪切变形的耦合效应及翼板剪力滞效应对组合箱梁挠曲变形的影响.因此,将组合箱梁挠度v(z)分解为如下3种挠度:① 基于拟平截面假定的Euler梁挠度w(z);② 波形钢腹板手风琴效应与剪切变形耦合(广义剪切变形)引起的挠度f(z);③ 翼板剪力滞效应引起的挠度g(z).综合式(7)和(8),可得翼板的挠曲纵向位移为
u(x,y,z)=-y[w′(z)+f′(z)+g′(z)]+
λρ(y)f′(z)+ηξ(x)g′(z)=
-yw′(z)-β(y)f′(z)-ζ(x,y)g′(z)
(9)
式中,λ、η分别为腹板广义剪切变形和翼板剪力滞效应的翘曲自平衡修正系数,且λf′(z)=v′(z)-θ(z),ηg′(z)=φ(z);ρ(y)为钢腹板手风琴与剪切耦合产生的纵向位移沿竖向的分布函数,对于上翼板有ρ(y)=-hu,对于下翼板有ρ(y)=hl;β(y)、ζ(x,y)分别为钢腹板的广义剪切变形与翼板剪力滞效应的翘曲函数,且
β(y)=y-λρ(y)
(10)
ζ(x,y)=y-ηξ(x)
(11)
根据位移-应变关系及胡克定律,由式(9)可得翼板的挠曲正应力为
Ecζ(x,y)g″(z)
(12)
式中,Ec为混凝土的弹性模量.式(12)右端第1项表示Euler梁应力σE;第2、3项分别表示广义剪切和剪力滞效应引起的翘曲应力σβ、σζ,即
σβ=-Ecβ(y)f″(z)
(13)
σζ=-Ecζ(x,y)g″(z)
(14)
若组合箱梁的弯矩M仅由拟平截面假定的Euler梁应力σE合成,则翘曲应力σβ和σζ在截面上将不会产生弯矩和轴力,即
(15)
(16)
(17)
(18)
式中,A为组合箱梁截面面积.
将式(13)和(14)代入式(15)~(18)中可得
(19)
Ix=λIyρ=ηIyξ
(20)

将函数ρ(y)和ξ(x)代入式(19)和(20),可得相应的截面参数表达式为
(21)
(22)
(23)
定义腹板广义剪切变形产生的广义力矩Mβ和翼板剪力滞引起的广义力矩Mζ分别为
(24)
(25)
将式(13)和(14)分别代入式(24)和(25),化简后可得
Mβ=-EcIβf″(z)
(26)
Mζ=-EcIζg″(z)
(27)
式中,Iβ为广义剪切惯性矩;Iζ为剪力滞惯性矩.
根据式(10)、(11)和(20)可得
(28)
(29)
由式(6)可得Iξ的表达式为
(30)
由式(13)、(14)、(26)和(27)可得
(31)
(32)
由此可知,波形钢腹板组合箱梁总的挠曲正应力σ可表示为
(33)
3 广义位移的单元刚度矩阵分析
本文将组合箱梁的挠曲变形状态解耦为满足拟平面假定的Euler梁挠曲、广义剪切变形与剪力滞效应引起的挠曲3种状态,建立了一种2节点12自由度的梁段单元模型(见图3).
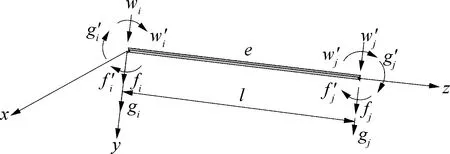
图3 梁段模型的节点移位
用δw、δf和δg分别表示图3中拟平面的Euler梁挠曲、广义剪切变形与剪力滞效应引起的节点挠曲位移向量,则
(34)
(35)
(36)
式中,i、j为任意单元两端节点.与δw、δf和δg对应的节点力向量Fw、Ff、Fg分别为
Fw={Qi,Mi,Qj,Mj}T
(37)
Ff={Qβi,Mβi,Qβj,Mβj}T
(38)
Fg={Qζi,Mζi,Qζj,Mζj}T
(39)
式中,Q、Qβ、Qζ分别表示Euler梁挠曲、广义剪切变形及剪力滞效应产生挠曲所对应的广义剪力.
由式(3)、(4)、(9)和(11) 可求得组合箱梁翼板的轴向应变ε、剪切应变γxz分别为
ε(x,y,z)=-yw″(z)-β(y)f″(z)-ζ(x)g″(z)
(40)
(41)
波形钢腹板的剪应变γyz为
(42)
由式(40)~(42)可求得梁单元的应变能为
η2GcAxg′2)dz
(43)
式中,Gc为混凝土翼板的剪切模量;Gw=[(a+b)/(a+c)]Gs为波形钢腹板的等效剪切模量[2-3],其中Gs为钢材的剪切模量,a、b、c为波形参数(见图4);Aw为钢腹板面积;Ax为翼板剪切翘曲面积,其表达式为[15]

图4 波形参数示意图
(44)
外荷载q作用下的单元势能为

(45)
因此,单元的总势能为
Π=U+V
(46)
单元任意点的挠度w、f和g由节点位移向量表示为
w=Nwδw
(47)
f=Nfδf
(48)
g=Ngδg
(49)
式中,Nw、Nf、Ng分别为w、f、g对应的位移形函数向量.选择Hermite多项式作为Nw、Nf、Ng的基本形式,既能保证求解精度,又不会出现剪切锁死现象,故
Nw=Nf=Ng=N={N1,N2,N3,N4}
式中
实际工程中由于翼板剪力滞效应与腹板广义剪切变形耦合产生的应变能相对较小,为简化分析,令式(39)中f″g″=0.将式(47)~(49)代入式(43),忽略耦合项后整理可得
(50)
由变分法及式(50)可得w、f和g的单元刚度矩阵Kw、Kf和Kg分别为
(51)
(52)
(53)
式中
同样,可求得外荷载q作用下单元等效节点力向量为
(54)
基于上述单元刚度矩阵及等效荷载向量,编制出适合该型组合箱梁的梁段分程序FGBOX.
4 数值算例
4.1 简支组合箱梁
以文献[3]中的简支组合箱梁为例进行分析,计算跨径l=18 m.其承受的2种荷载工况分别为:①跨中腹板顶承受集中荷载P=340 kN;②承受均布荷载作用q=54 kN/m.混凝土与钢材的弹性模量分别为31 和200 GPa,泊松比分别为0.16和0.30,剪切模量分别为12.92和76.92 GPa.根据本文方法计算的截面参数见表1.

表1 波形钢腹板组合箱梁截面参数计算结果
运用本文分析理论,分别以拟平面假定的Euler梁理论(EBT)[4]和本文程序FGBOX分析该组合梁.作为对比验证,采用有限元软件ANSYS建立该简支组合梁的三维空间有限元模型(3D FEM).组合箱梁上、下翼板采用soild45实体单元模拟,波形钢腹板采用shell63壳单元模拟,壳与实体采用MPC方式将2种单元耦合连接.该模型跨中附近截面的挠曲应力竖向分布计算结果见图5.

(a) 集中荷载作用下z=8.7 m处截面
由图可知,采用程序FGBOX计算得到的应力与3D FEM结果吻合良好.在上、下翼板形心处,EBT计算得到的应力与3D FEM结果吻合较好,但在翼板竖向其他部位存在一定差异.采用EBT计算的上翼板顶面及下翼板底面应力偏小,尤其在集中荷载作用附近表现明显.因此,采用拟平面假定的EBT计算该组合梁的挠曲应力,结果将偏于不安全.
表2列出了组合箱梁跨中截面的3种挠度及3D FEM计算组合梁挠度v.由表可知,本文方法与3D FEM结果吻合较好.针对此算例,2种荷载工况下f/w>50%,而g/w<6%,说明广义剪切变形引起的挠度较大,而剪力滞效应引起的挠度较小.

表2 简支组合箱梁跨中截面的挠度
4.2 三跨连续组合箱梁
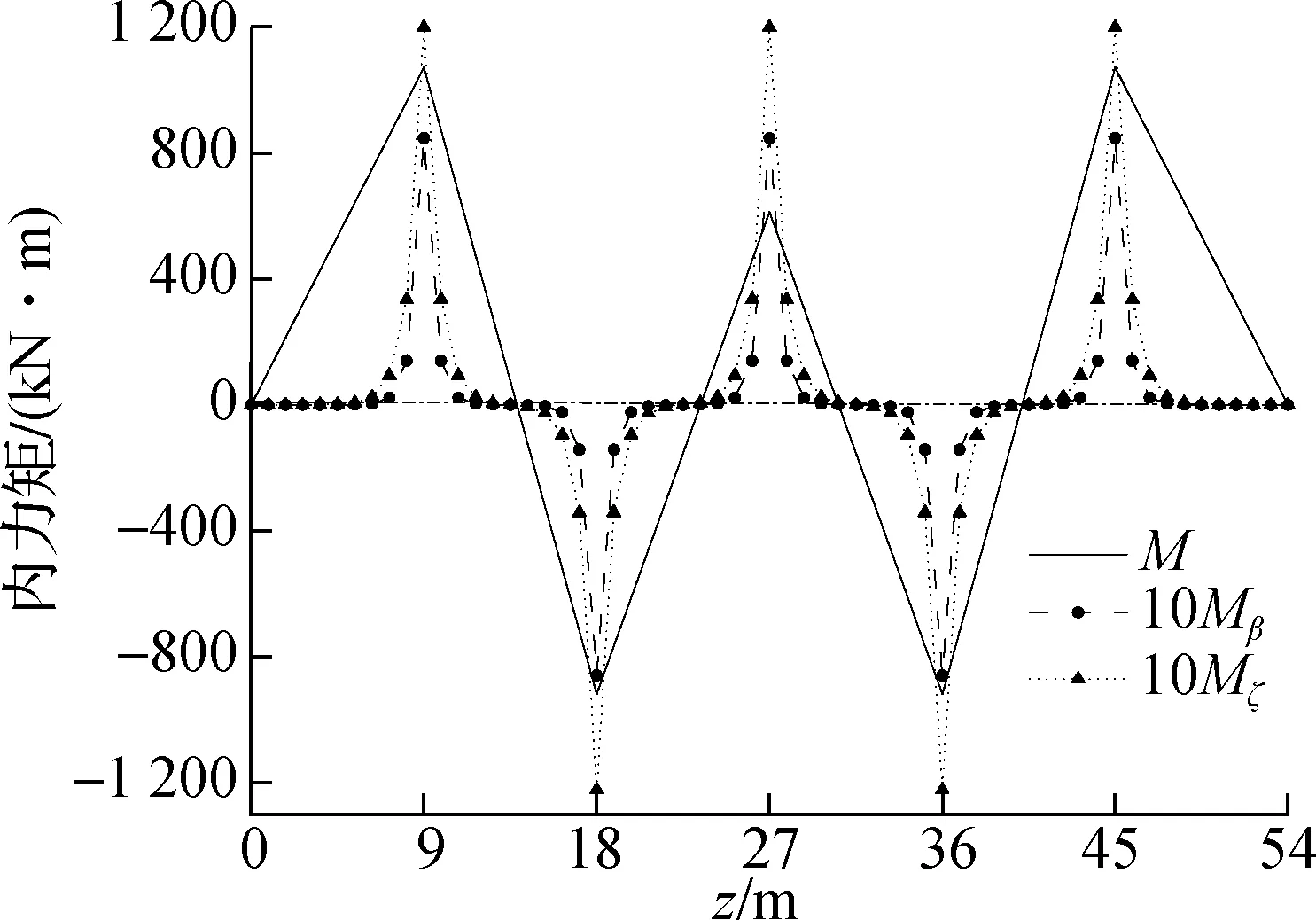
采用4.1节中的简支组合梁截面,并将梁跨径改为3×18 m的连续梁.连续梁所承受的2种荷载工况为:① 各跨跨中受集中荷载P;② 全梁受均布荷载q.该算例的荷载值及材料特性与4.1节保持一致.采用FGBOX程序,将全梁沿梁轴共划分为60个梁段单元,梁段长度为0.9 m.为便于比较,将广义内力矩Mβ和Mζ放大10倍,并与弯矩M分布曲线一同绘制于图6中.将采用FGBOX程序与3DFEM两种方法获得的连续梁边跨的最大竖向位移列于表3中.
(a) 集中荷载

表3 连续组合箱梁边跨的最大竖向位移
由表3可知,采用FGBOX程序计算得到的连续梁挠度与3D FEM分析结果吻合较好,从而证明了梁段程序的有效性.对于连续组合箱梁,腹板的广义剪切变形使挠度出现较大增幅,而剪力滞效应引起的挠度增幅也超过10%.由图6可知,在集中荷载下,广义内力矩在中支点和集中荷载作用位置出现尖峰;而在均布荷载作用下,广义内力矩仅在中支点处出现尖峰,且在尖峰附近增大或衰减速率更快.在图6(b)中区段Ⅰ范围内,广义内力矩与弯矩的符号相反;由式(31)~(33)可推知,该范围内会出现负剪力滞效应与负广义剪切变形.
为反映广义剪切变形和剪力滞效应对组合箱梁挠曲应力的影响,令Sβ和Sζ分别表示广义剪切变形和剪力滞效应相对于拟平面Euler梁挠曲的应力放大系数,即Sβ=(σβ+σE)/σE,Sζ=(σζ+σE)/σE.连续组合梁最大截面应力放大系数Sβ,max与Sζ,max沿梁轴的分布曲线见图7.

(a) 集中荷载
由应力放大系数的定义可知,在梁轴的反弯点M=0处,因分母为0而存在渐近线.集中荷载附近应力放大系数已超过2.0,而在中支点附近其值则更大.广义剪切变形对组合箱梁应力的影响较大,在实际工程中应引起重视.在图7(b)中区段Ⅱ内出现小于1的应力放大系数,即出现负广义剪切变形与负剪力滞效应的现象.由于本文中使用的混凝土翼板为等厚平直的几何形状,未考虑箱梁横隔板的影响,这与实际工程中的变厚度翼板及横隔板设置存在明显差异.为获得符合实际的分析结果,采用本文方法计算截面参数时,上、下混凝土翼板的中心轴应取该翼板的形心轴.设置横隔板部位计算截面参数时,广义位移对应的截面参数应取较大值,以便于采用梁段程序求解.
5 结论
1) 通过引入广义剪切变形和剪力滞效应的广义挠度,将组合箱梁挠曲变形分解为便于理解的拟平面Euler梁挠曲、广义剪切变形引起的挠曲以及剪力滞效应引起的挠曲3种状态.
2) 采用Hermite形函数建立适合本文挠曲理论的单元刚度矩阵,并编制出相应程序,从而获得精度较高的挠曲变形和应力结果.
3) 忽略横隔板等其他影响因素时,广义力矩在集中荷载和中支点附近会出现较大尖峰.当广义力矩与弯矩的符号相反时,会出现负广义剪切变形与负剪力滞效应的现象.
4) 数值算例结果表明,在集中荷载及中支点截面附近,广义剪切变形与剪力滞效应引起的应力放大系数甚至超过2.0,需引起工程师们的重视.
