水植生菜自动采摘装置整体方案设计
2021-10-20蒋会哲张春燕
蒋会哲,张春燕
1. 郑州铁路职业技术学院(郑州 450000);2. 黄河科技学院(郑州 450000)
日益增长的人口和土地资源减少产生的矛盾一直以来是全球面临的主要难题,如何减少土地占用率同时提高农作物产量迫在眉睫[1]。其中蔬菜作为人们食谱中关键的一环,具有重要的营养价值和商业效益[2],目前传统的土壤种植蔬菜产能已无法满足人们需求,植物工厂种植模式已逐渐流行全球,据预测,2020年中国植物工厂规模将达到100亿,相关产业及生产设备都将井喷式发展[3-4]。
植物工厂是通过人为营造植物所生长的环境条件,从而达到植物快速高效成长的一种现代农业生产方式[5-7]。水植栽培是植物工厂的典型代表,可以采用立体栽培方式从而提高土地利用率,同时直接对农作物根部输送营养液,使农作物加速生长,培养作物的生长速度为常规土壤种植的2~4倍,土地利用率更是高达40~108倍[8]。
随着我国农村年轻劳动力不断外移,植物工厂对自动化程度要求越来越高[9],以水植生菜为例,目前国内外生菜的立体搬运、根部切割、拔取、包装都是以人工为主[10]。Hayashi[11]设计出茄子自动采摘设备,Reed[12]、周云山等[13]都设计了蘑菇自动采摘设备[12-13],杜冬冬等[14]设计了一种甘蓝自动采摘设备,但仅仅适用于大田种植方式,目前对于水植栽培模式叶菜类的自动采摘设备研究较少。因此,此次研究以水植生菜为试验对象,对生菜的自动采摘方案进行研究,以期为水植生菜自动采摘设备的设计提供一定参考。
1 水培生菜培养及采摘现状分析
水植生菜目前常用的栽培方式有平面栽培和立体栽培两种[15],平面栽培方式如图1(a)所示,将生菜置于玻璃温室内进行日光培养,立体栽培方式如图1(b)所示,生菜错落分布在封闭植物工厂内,采用LED人工光源进行培养。

图1 水培生菜栽培方式
据调查,平面栽培模式和立体栽培模式,营养液输送、循环、监测、调控均已实现自动化,播种、移栽定值、生菜采摘却依然以人工为主。
水植生菜目前的人工采摘方式主要有去根采摘和留根采摘两种,劳动力成本高,熟练的作业人员采摘的生菜品质高、不散叶、完整性好,去根采摘方式如图2(a)所示,作业人员在定值板上将生菜根茎去除后进行采摘,留根采摘方式如图2(b)所示,生菜在销售时全部保留着根须。

图2 水培生菜栽培方式
去根采摘方式在生菜销售时不能体现其水培特征,导致销售价格偏低,留根采摘方式体现了水培特征,满足了消费者购买生菜后的培育和欣赏,但生菜根部太长且大部分为根须。因此最佳方案为采用部分留根采摘,即留取生菜主根长部分进行采摘。
2 自动采摘装置性能及分析
结合生菜人工采摘方式的分析,想实现水培生菜的自动采摘装置,需要具备的主要功能有:(1)水培生菜定植板的自动运输功能;(2)单株水培生菜根须自动切割功能;(3)将去除根须的单株生菜从定植板中自动取出的功能;(4)水培生菜的自动搬运功能。各个环节的主要性能需求如表1所示。
3 水培生菜自动采摘装置方案制定
3.1 定植板输送机构方案制定
借鉴物流运输过程中的自动化装置及定植板输送所需满足的性能,水培生菜定植板输送装置的工作流程如图3所示。
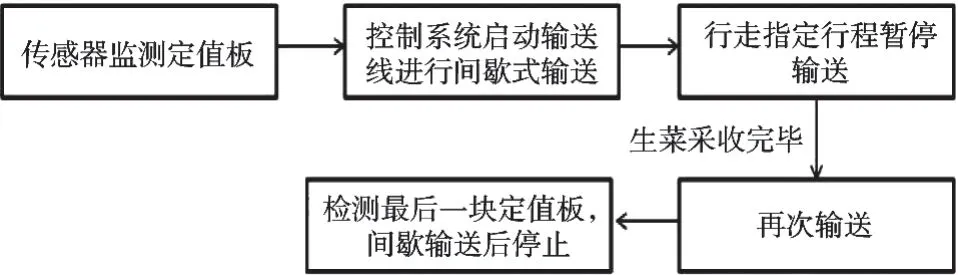
图3 定植板输送装置工作流程
根据常见的运送模式给出如图4(a)所示的带轮输送和如图4(b)所示的链轮输送两种方案,使用带轮运输的方式可以保证运输过程平稳,但定植板的质量会对输送带形变产生影响,另外需要固定定植板的输送轨迹,因此会引入“L”型挡板用于支撑和定位定植板,这样会使输送带的磨损进一步加大,为了使生菜根部和定植板顺利进入输送线,需要较大的张紧力,会进一步磨损输送带,但带式输送构造相对简单,成本较低。
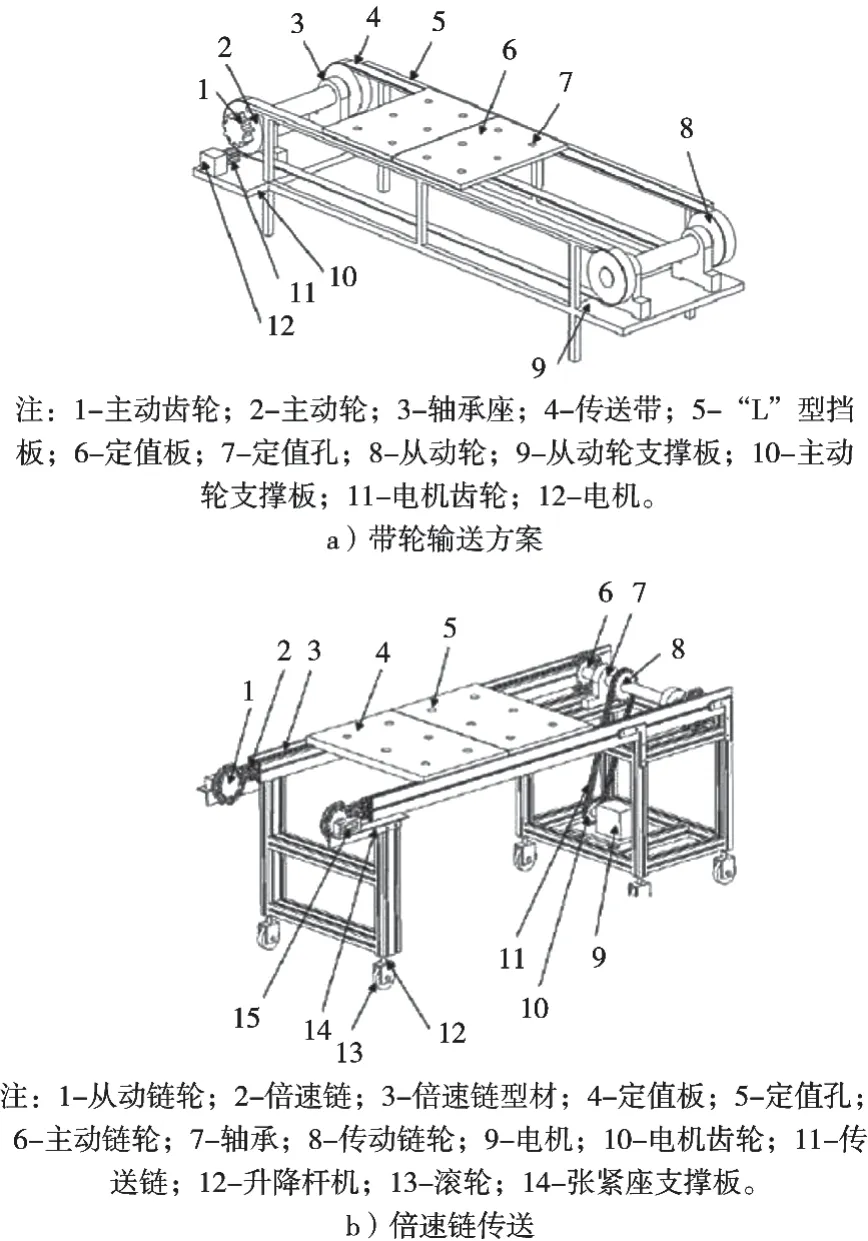
图4 定植板输送机构方案
链传动运输相对于带传输不易磨损,且不需要太大的张紧力,在步进电机的驱动下可以实现输送线的间歇输送,运输定植板的倍速链型材自带挡板,可以保证定植板的运输路线,定植板输入端无滚筒,可以使输送线变短,但其构造相对复杂,成本较高。二者对比如表2所示。考虑到大量作业时,对输送装置磨损性能要求更高,建议采用链轮运输方案。

表2 定植板输送机构方案比较
3.2 根部切割机构方案制定
在定值板输送机构暂停期间,根部切割机构需要在去除多余根系保留主根从而使生菜具备水植特性,通过查阅国内外切割机构设计文献及水植生菜切割所需匹配的条件,提出3种根部切割机构方案进行对比,图5(a~c)分别为环形带刀切割机构、剪刀切割机构、往复式切割机构。

图5 根部切割机构方案
环形带刀切割机构为土壤种植叶菜类采收时常采用的切割机构,环形带刀在两个电机驱动下对蔬菜根部进行连续切割,运行平稳,水培生菜根部由于无土相对轻飘,采用环形带刀切割机构很难保证切割后生菜根部的齐平性,影响生菜水培特性。
剪刀切割机构是根据人工去根方式进行设计的,其运行平稳,通过外力使剪刀开闭从而进行切根操作,因此其控制系统相对复杂,但是能很好地保证水培生菜根部的平齐性,如图5(b)所示,此处将剪刀设计成一段固定,一段旋转的方式,可以一定程度上降低剪刀开闭的复杂性,剪刀一侧采用连接板固定,在单杆双作用气缸的推动下可以进行移动,通过设计不同大小的剪刀从而实现多个生菜根部同时切割,提高工作效率,可用于大量作业。
往复式切割机构和环形带刀切割一样,依靠刀片与根部接触产生的切割力进行切割,但水植生菜根部较轻,因此也不能保证水培生菜根部的平齐性,切割刀片固定在一维的连杆上,因此在切割过程相对不平稳,容易产生较大噪音。三种根部切割机构的对比如表3所示。

表3 根部切割机构方案比较
3.3 生菜拔取搬运机构方案制定
生菜拔取机构最重要的是要保证可以无损伤地将根须切割后的水植生菜从定值板中取出,同时将生菜运往下一工站输送装置。对于小型物件,常见的抓取方式有气爪抓取和仿型手指抓取,现针对这两种方式提供两种拔取搬运机构方案进行对比,如图6(a)(b)所示。
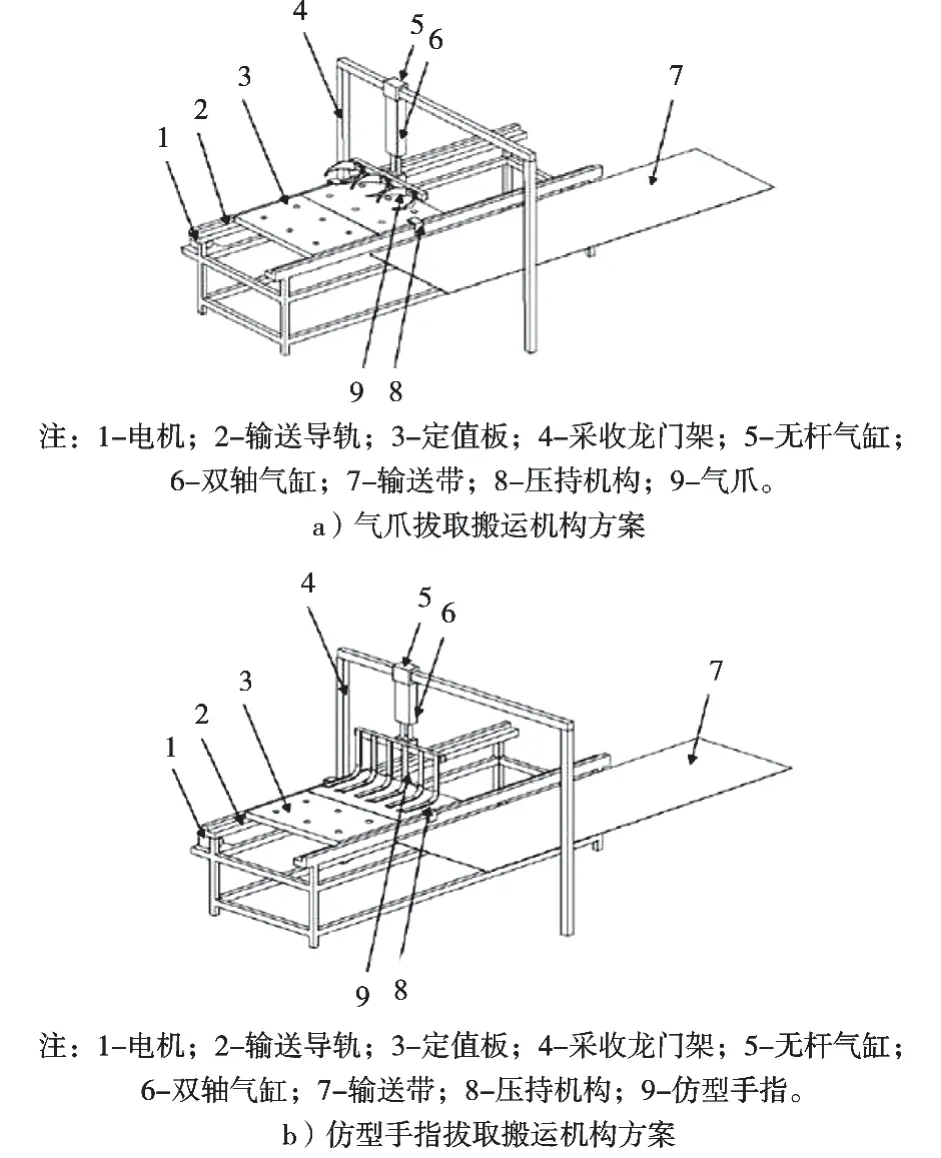
图6 拔取搬运机构方案
对于气爪拔取搬运机构,位于双轴气缸下端的气爪一般为通用结构,其抓取力接近,但不同生菜其展开度和根茎直径是有区别的,因此存在部分生菜被拔取时出现损伤、出现脱落,若想解决该现象,就需要针对不同生长情况的水植生菜设计不同的气爪进行拔取,这会大大增加机构的复杂性和成本。
对于仿型手指拔取搬运机构,其整体架构与气爪拔取方式相近,位于双轴气缸下方的仿型手指其指间间距和高度均可以进行调节,从而可应用于不同生长情况的水植生菜,通用性高,成本低。两种方案的对比如表4所示。

表4 生菜拔取搬运机构方案比较
3.4 水培生菜自动采摘最终方案制定
基于前3小节对自动采集装置各机构方案的分析对比,分别选用链轮定值板运输方案、根部剪刀切割方案、仿型手指拔取搬运机构方案,其构成的自动采集最终方案如图7所示。配合上控制系统,其整个工艺流程图如图8所示。
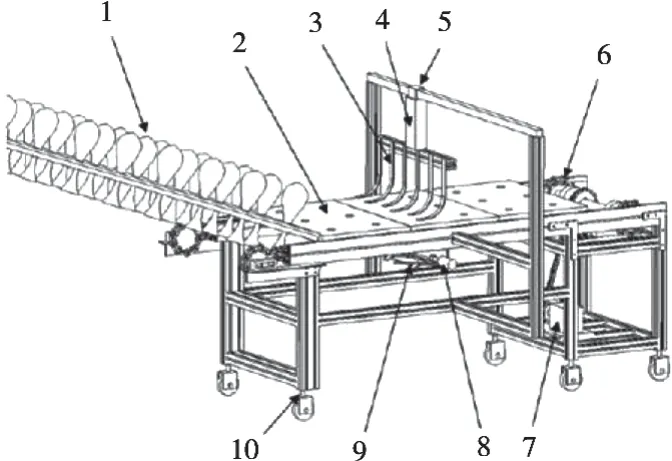
图7 水培生菜自动采摘最终方案

图8 水培生菜自动采集方案工艺流程
4 结论
首先对目前水培生菜的人工采摘方式进行了分析,基于人工采摘方式给出自动采集方式各个环节机构装置所需具备的功能和性能,分别对定植板输送机构、根部切割机构、拔取搬运机构的多个方案进行了对比分析,最终选择了链轮定值板运输方案、根部剪刀切割方案、仿型手指拔取搬运机构方案,确定了水培生菜自动采摘的整体方案和工艺流程。对水植生菜各重要环节机构的设计和方案进行对比,为水植生菜自动化装置设计提供一定的参考意义。