嫦娥五号返回器降落伞回收动力学建模与分析
2021-10-19王立武高庆玉许望晶张国斌张青斌
王立武,高庆玉,许望晶,张国斌,张青斌
(1.东南大学土木工程学院, 南京 211189;2. 中国空间技术研究院北京空间机电研究所,北京 100094;3.国防科技大学空天科学学院,长沙 410073)
0 引 言
2020年12月17日,嫦娥五号返回器携月壤在内蒙古四子王旗着陆场安全着陆,标志着中国探月工程圆满完成“绕、落、回”三步走规划。嫦娥五号返回器的再入方式为半弹道跳跃方式,具体过程如下:返回器与轨道器分离后,返回器直接进入地球大气层,下降到海拔高度约60 km时,返回器在大气动力的作用下重新跳跃出大气层,而后再次进入大气层,当高度下降到11 km(即设计开伞高度)后,降落伞系统启动工作,返回器减速直至着陆。降落伞系统采用减速伞加主伞两级减速、侧向弹盖开伞和单点吊挂方式[1]。与“神舟”载人飞船返回舱相比,嫦娥五号返回器的体积只有前者的1/7,质量仅为前者的1/10,返回器的飞行轨迹和姿态更容易受各种干扰因素的影响,导致返回器的理论落区范围将近2万平方公里,是载人飞船的16倍。加之积雪夜暗极寒的环境条件,嫦娥五号返回器的回收搜索任务相对难度较大。
嫦娥五号返回器的回收着陆过程从高空开伞到着陆,系统工作时间长、动作多,作为柔性体的降落伞系统,容易受到风速、风向、返回器弹道实测值以及系统设自身计参数等各种带偏差参数的影响,返回器落点具有一定分布特性。开展返回器开伞后飞行轨迹的偏差特性分析对返回器落点预报具有重要的意义,有助于提高提高返回器的回收效率。
返回式航天器降落伞的工作过程可以划分为拉直、充气和稳定下落三个阶段,国外内学者针对降落伞工作过程中的动力学问题的研究取得了颇为丰富的研究成果。美国约翰逊航天中心(Johnson Space Center Home,JSC)和纳蒂克士兵中心(Natick Soldier Center,NSC)共同研制了货物空投仿真系统(Decelerator System Simulation,DSS),建立了货物从离飞至落地过程的六自由度刚体动力学模型,使用弹簧阻尼模型模拟降落伞和货物之间的连接,结合空投试验对仿真系统的正确性进行了验证[2]。美国兰利研究中心(Langley Research Center,LRC)研发了针对星际航行航天器再入着陆过程的动力学仿真及轨迹优化软件POST、POST II (Program to Optimize Simulated Trajectories),该软件实际应用于在火星探测[3]、航天器返回回收[4]及行星大气再入和目标捕获[5]等任务中。俄罗斯科学技术中心针对柔性织物结构开发了MONSTR软件,用于研究气流作用下的布、带、绳索等柔性结构的气动特性和弹性变形问题。国防科技大学研制了具备对多级伞系统全过程仿真设计能力的降落伞系统动力学仿真软件ARLSSS(Aerocraft Recovery and Landing Simulation Software System)[6],应用于“尖兵”和“神舟”系列载人飞船回收过程的动力学建模与仿真,并此软件基础之上,进一步搭建了包含程序控制装置和压力模拟器的“神舟”系列飞船半实物仿真平台,通过飞船空投实验数据验证了半实物仿真系统的合理性。国内北京航空航天大学柯鹏等[7]开展了货台重装空投系统仿真研究,建立了降落伞减速全程视景仿真平台。南京航空航天大学王旭东等[8]开发了降落伞系统设计及故障诊断软件,赵吉松等[9]提出了一种基于节点自适应稀疏配点法的探月返回器跳跃式再入轨迹优化算法;西北工业大学高树义等[10]建立了月球取样返回器伞舱盖弹射分离过程的动力学模型,用于伞-器组合体分离过程安全性分析。
本文针对探月三期嫦娥五号返回器回收着陆过程,建立了返回器-降落伞高保真动力学模型,结合空投试验进行了模型验证,利用所建模型对回收任务中返回器设计参数、实测弹道参数、环境参数等偏差变量对返回器落点的影响进行了研究。
1 嫦娥五号返回器降落伞系统
1.1 降落伞系统
嫦娥五号返回器降落伞系统采用减速伞加主伞两级减速方案。减速伞为带条伞,用来承受最大开伞速压,并稳定返回器的运动,为主伞开伞创造合适的条件;主伞为环帆伞,用于将返回器减速到到规定的伞降着陆速度,主伞采用一次收口开伞方法,使主伞呈两次开伞,以控制各级开伞过载不致超出规定的限制要求。降落伞系统的组成如图1所示。
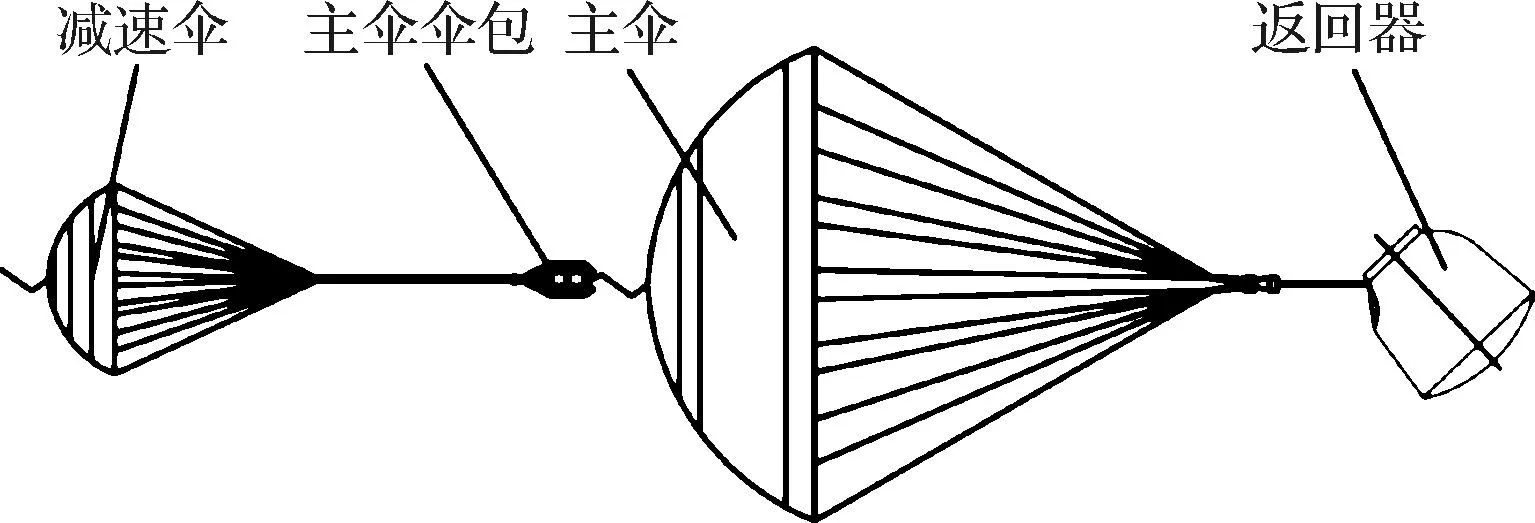
图1 降落伞系统组成示意图Fig.1 Composition of parachute system
减速伞和主伞的主要参数如表1所示。
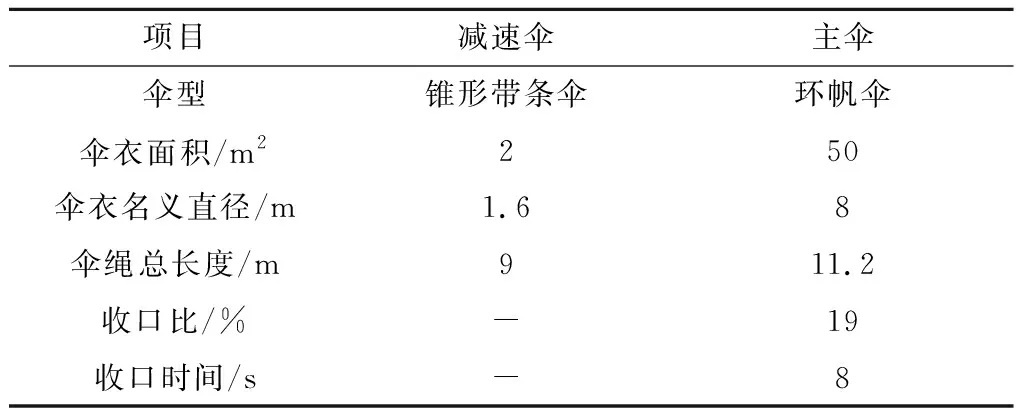
表1 降落伞主要特征参数表[1]Table 1 Main characteristic parameters of parachutes[1]
1.2 系统工作程序
如图2所示,返回器正常返回工作程序如下:当返回器下落至海拔11 km高度时,启动回收程序,系统控制装置发出指令,弹射伞舱盖,拉出减速包,依次拉出减速伞和舱盖伞,直至舱盖伞与减速伞实现分离。在减速伞的作用下,返回器实现减速、姿态稳定,减速伞工作阶段结束后与返回器分离,同时拉出主伞包,拉直主伞,主伞首先充满至收口状态,延时几秒后收口解除,主伞完全充满,返回器乘主伞以安全速度着陆。
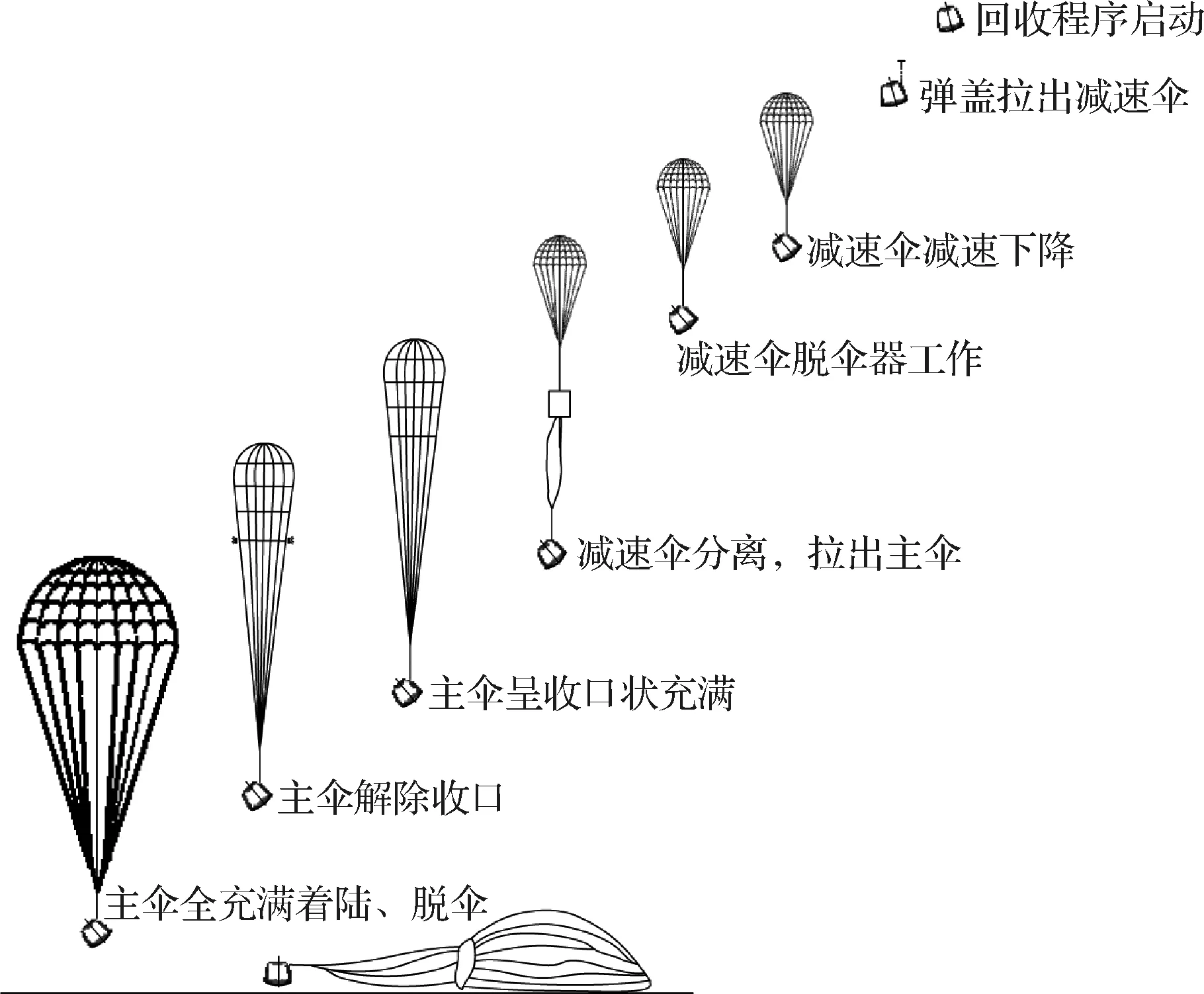
图2 返回工作程序图Fig.2 Recovery process of parachute-capsule system
2 返回器-降落伞动力学
嫦娥五号返回器回收系统降落伞由两具减速伞和主伞组成,二者结构和尺寸虽各不相同,但每具降落伞均经历了伞绳与伞衣拉直、伞衣充气、稳定下落等工作阶段。本节针对降落伞的不同工作阶段,分别建立拉直充气和稳定下落模型。
2.1 拉直充气模型
降落伞的拉直过程是一个变质量动力学过程,本文使用理想情况下的Wolf直线拉出模型进行模拟。模型主要假设为:伞绳及伞衣从伞包内依序拉出,拉直过程中降落伞和返回器在任一时刻弹道倾角相同[11]。降落伞的充气过程仿真关键在于对伞衣阻力面积变化规律的模拟,在本文所建立的充气模型中采用如下经验公式拟合
(1)
式中:t代表飞行时间,tf代表降落伞开伞时间,kf代表修正系数。
2.2 稳定下落模型
为便于计算,对嫦娥五号返回器—降落伞系统做如下简化假设:
1)降落伞为轴对称,伞衣完全充满后形状固定,降落伞和返回器均为刚体,二者之间的连接形式为球铰连接。
2)使用附加质量、附加质量惯性矩模拟降落伞非定常运动引起的气动力、气动力矩增量。
3)不考虑返回器尾流影响。
以大地固连坐标系、返回器和降落伞连坐标系为参考坐标系,建立降落伞—返回器九自由度动力学模型,坐标系定义如图3所示:大地坐标系Od-XdYdZd原点Od取在降落伞—返回器系统投放瞬间返回器在地面的投影点处,OdXd轴沿着重力方向铅垂向下,OdYd轴、OdZd轴与OdXd轴构成右手直角系;伞体坐标系O-XpYpZp原点取在铰接点O处,OXp轴沿着降落伞的对称轴向下,OYp轴和OZp轴符合右手法则;返回器坐标系O-XbYbZb的原点取在铰接点O处,OXb轴沿着返回器的对称轴指向下,OYb轴和OZb轴符合右手法则。
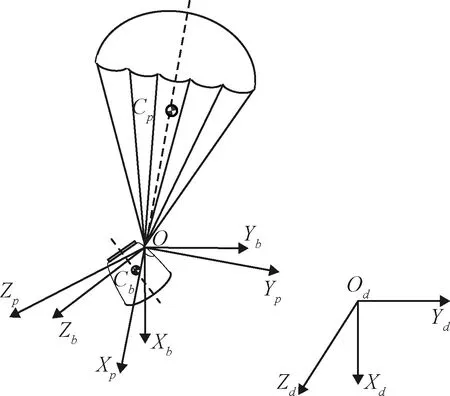
图3 降落伞-返回器系统坐标系定义Fig.3 Coordinate of parachute-capsule system
降落伞质量及附加质量用矩阵mp表示,其对铰接点O的转动惯量则以矩阵Ip表示,返回器的质量用mb表示,返回器相对铰接点O的转动惯量用矩阵Ib表示。降落伞的广义质量和转动惯量则可描述如下:
(2)
式中:mc为降落伞质量,(Ix,Iy,Iz)为降落伞三个轴向转动惯量;(a11,a33,a44,a66)为降落伞的附加质量。

(mpg+mbg)+Fp+Fb
(3)
(4)
(5)
综合式(3)~式(5)即可进行仿真分析降落伞-返回器系统的动力学特性,获得物-伞系统稳定下落阶段的弹道特性。
3 空投试验验证
在第2节所建立的嫦娥五号返回器-降落伞系统动力学模型中,包含多个简化假设和试验数据,本节通过空投试验对所建立的理论模型进行验证分析。如图4所示,空投试验采用与返回器外形一致的全尺寸模型来进行。
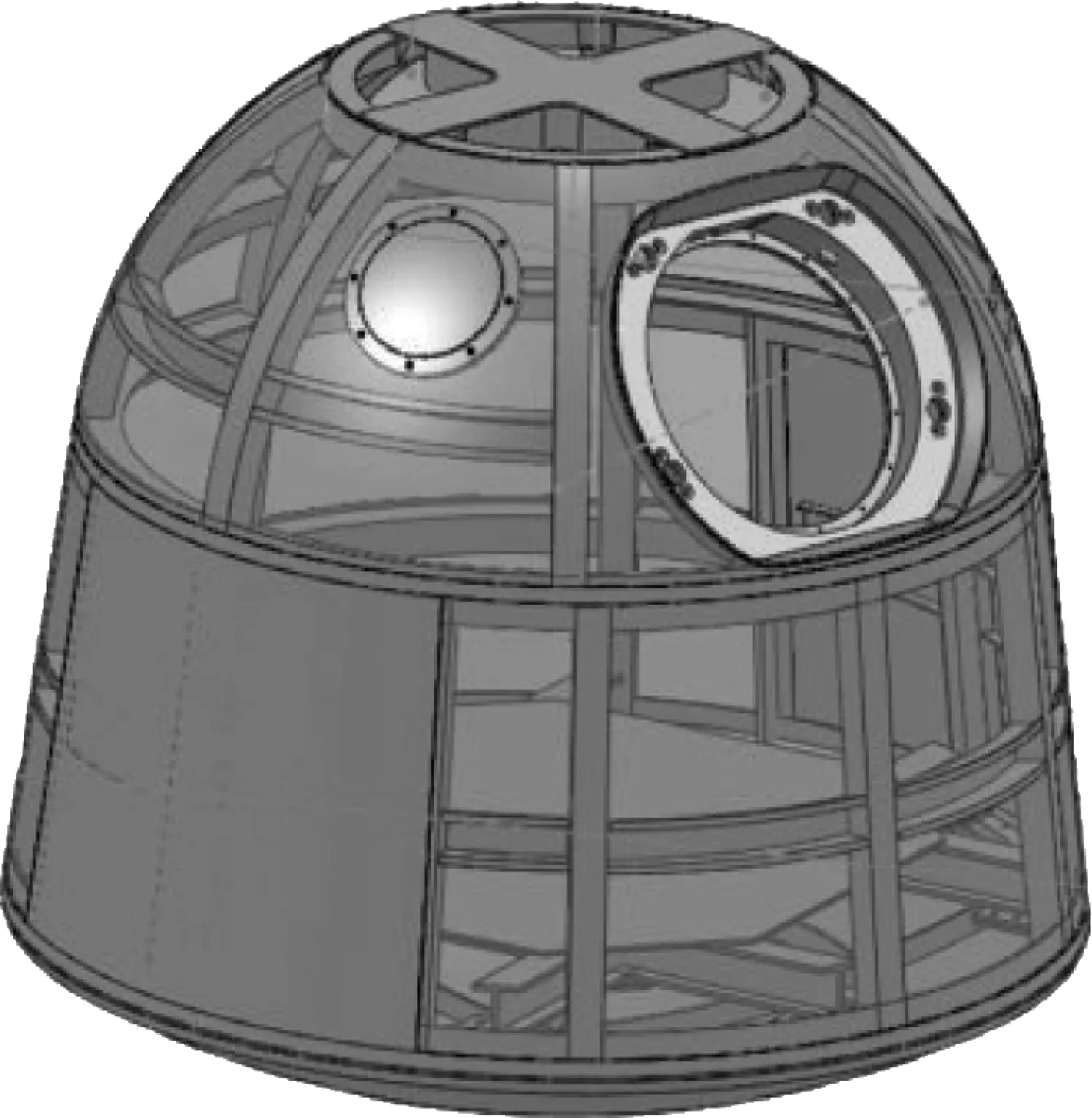
图4 返回器全尺寸空投模型Fig.4 Fullscale capsule modle in the airdrop test
空投试验先后经历模型投放、弹盖拉减速伞、脱减速伞拉主伞、主伞解除收口、主伞全张满、试验模型着陆等过程,地面观测站测量到伞-舱组合体空间交汇段的伞舱盖弹道数据。表2给出了空投试验中降落伞系统典型特征点的外弹道数据。
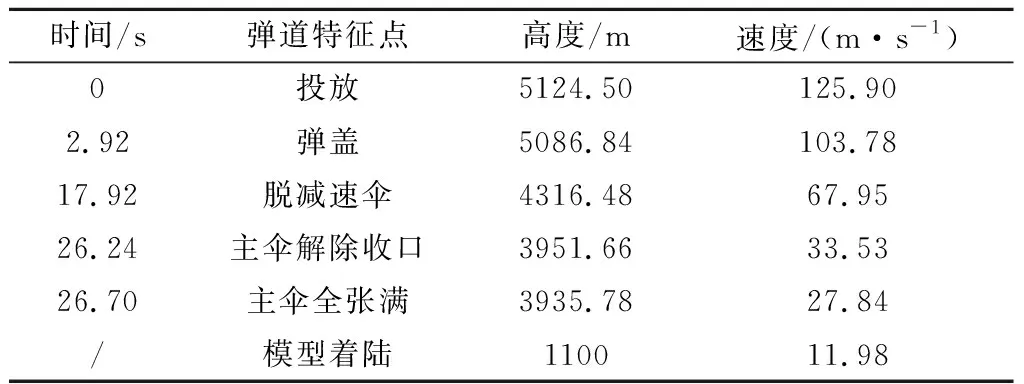
表2 空投试验外弹道数据Table 2 trajcectory data of airdrop test
图5、图6为高度和速度的数值仿真结果与空投试验实测值的对比曲线图。可以看出数值仿真结果与空投试验的结果具有良好的一致性,前文所建立的嫦娥五号返回器-降落伞系统动力学模型正确性和有效性得到验证。
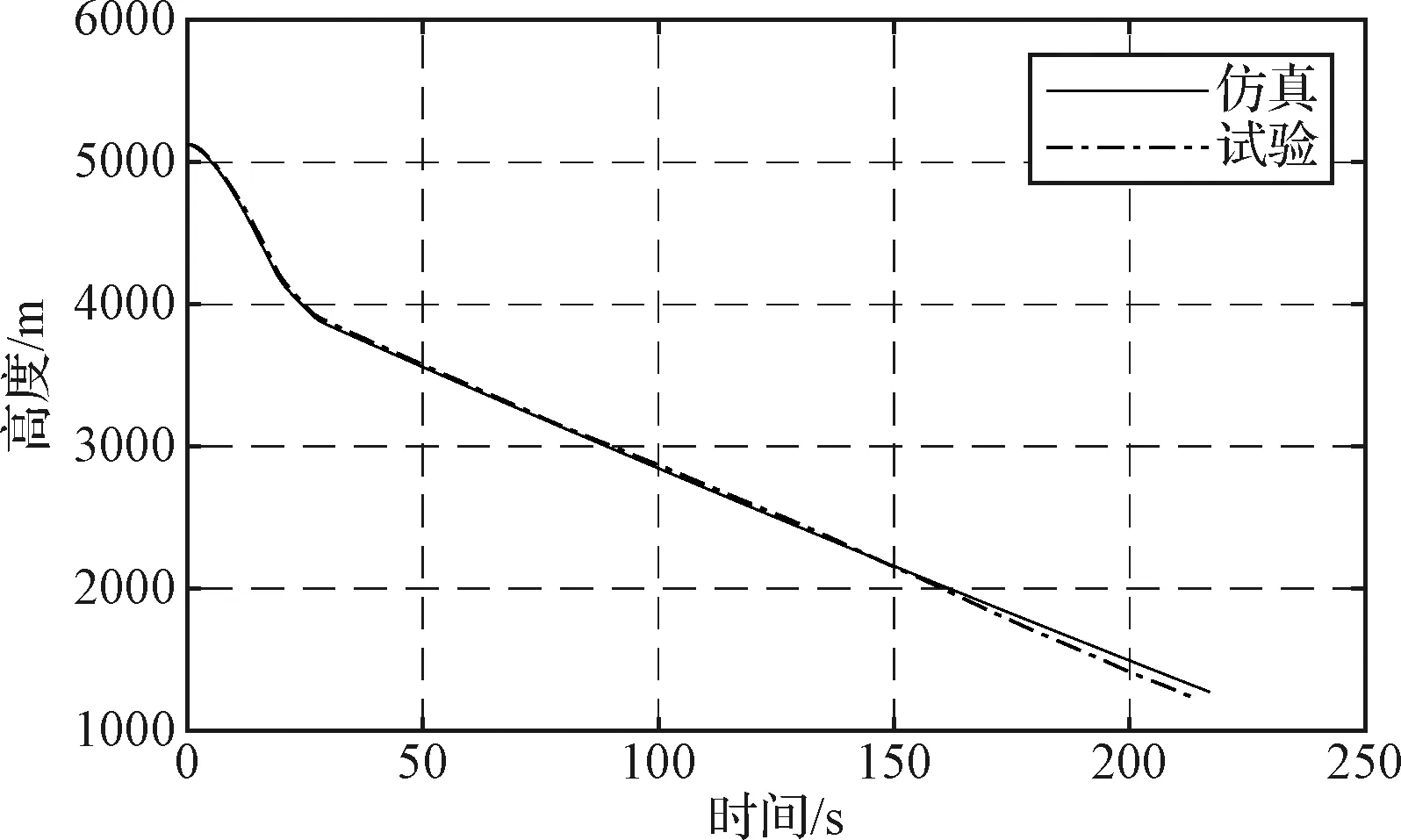
图5 海拔高度随时间变化Fig.5 Variation of altitude with time
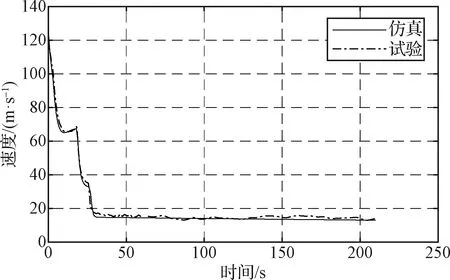
图6 合速度随时间变化Fig.6 Variation of resultant velocity with time
4 偏差量对落点的影响分析
在嫦娥五号返回器回收着陆过程中,伞-舱组合体的运动同时受到返回器设计参数、实测弹道参数、环境参数等多个带偏差变量影响,使得返回器落点呈现为一定区域范围。本节选取其中9个典型偏差量,分析求解带偏差参数对伞-舱组合体落点范围的影响,偏差量及偏差范围见表3。
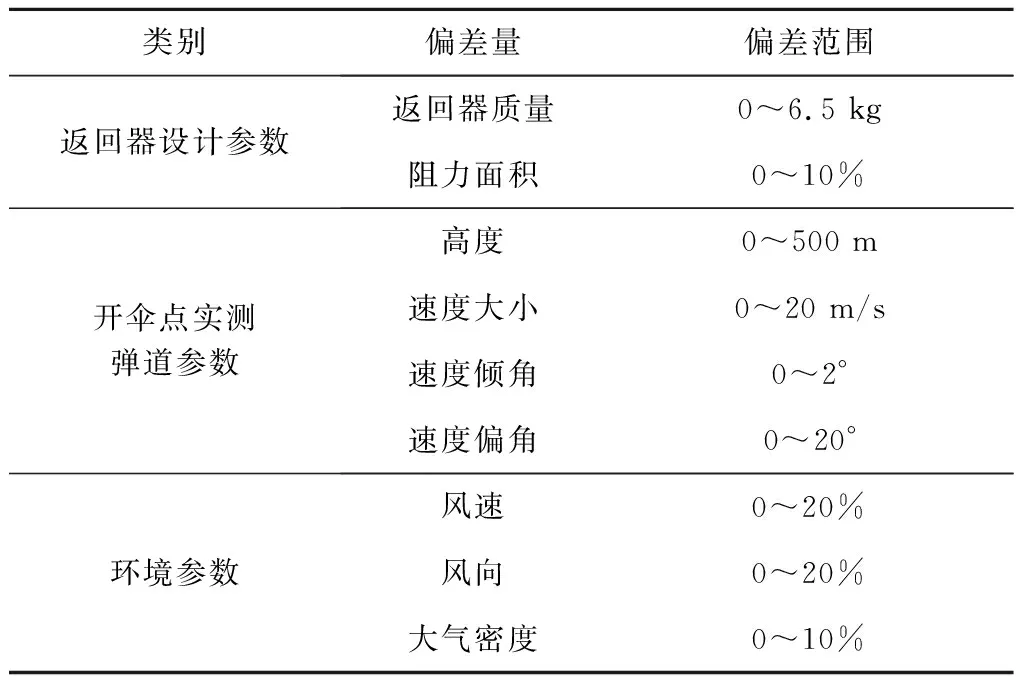
表3 偏差参数及偏差范围Table 3 Deviation parameters and deviation area
计算使用的返回器质量327.5 kg,开伞点高度11 km、地固系下速度三分量分别为4.9 m/s、-116.7 m/s、-43.6 m/s,落点海拔1260 m,风场数据见表4。
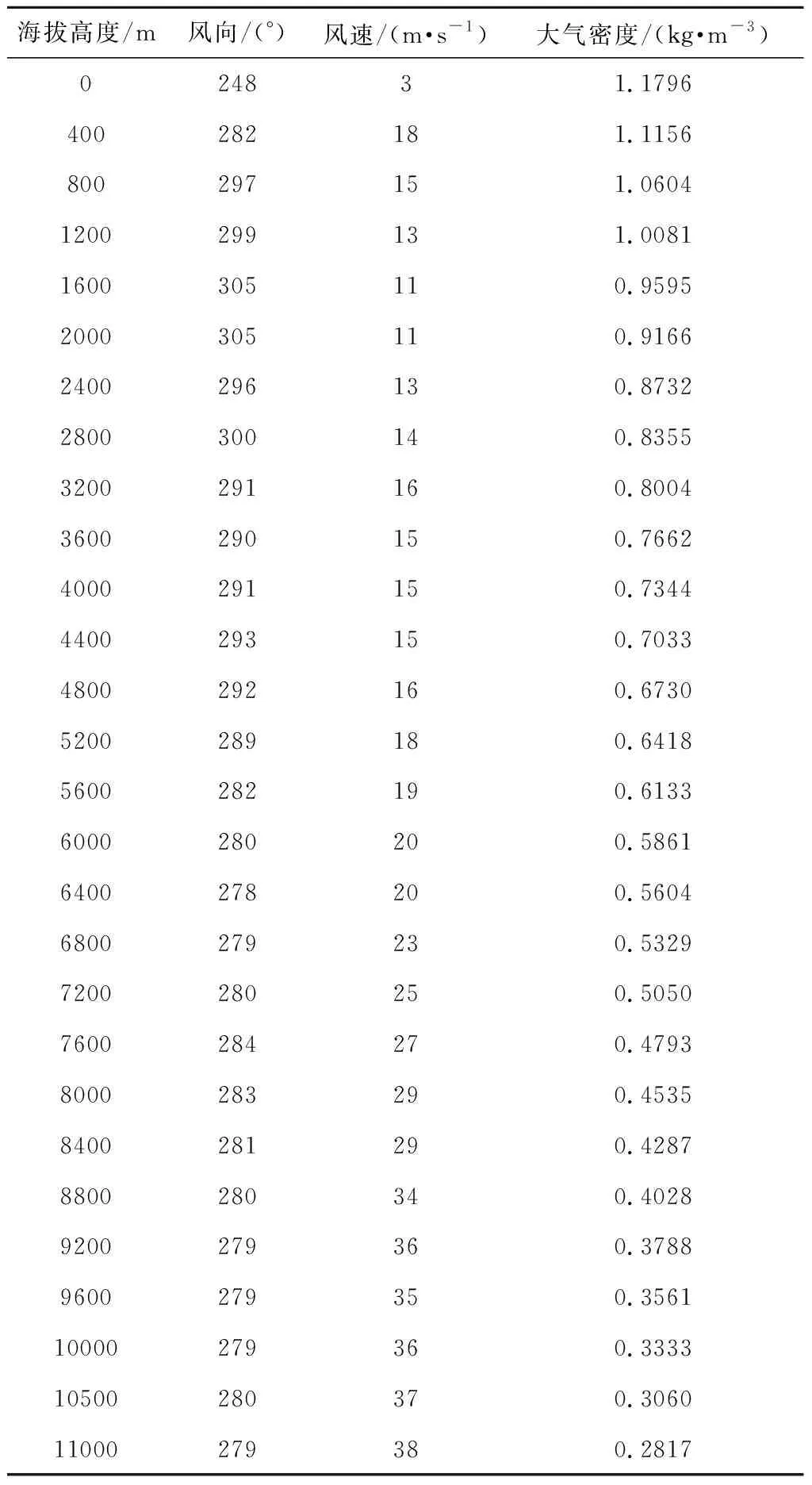
表4 风场数据Table 4 Wind field data
图7~图9显示了所选取的偏差量对返回器落点的影响,在假定的偏差范围内,落点偏差受到风速、风向偏差的影响最大,开伞点高度,阻力面积和大气密度的影响次之,返回器质量、速度偏角、速度大小、速度倾角相对较小。可见,风场环境数据、开伞点高度和返回器(降落伞)阻力面积的测量偏差是返回器落点预报偏差的主要因素,若想有效提高落点预报精度,需重点提高这些因素的测量精度。
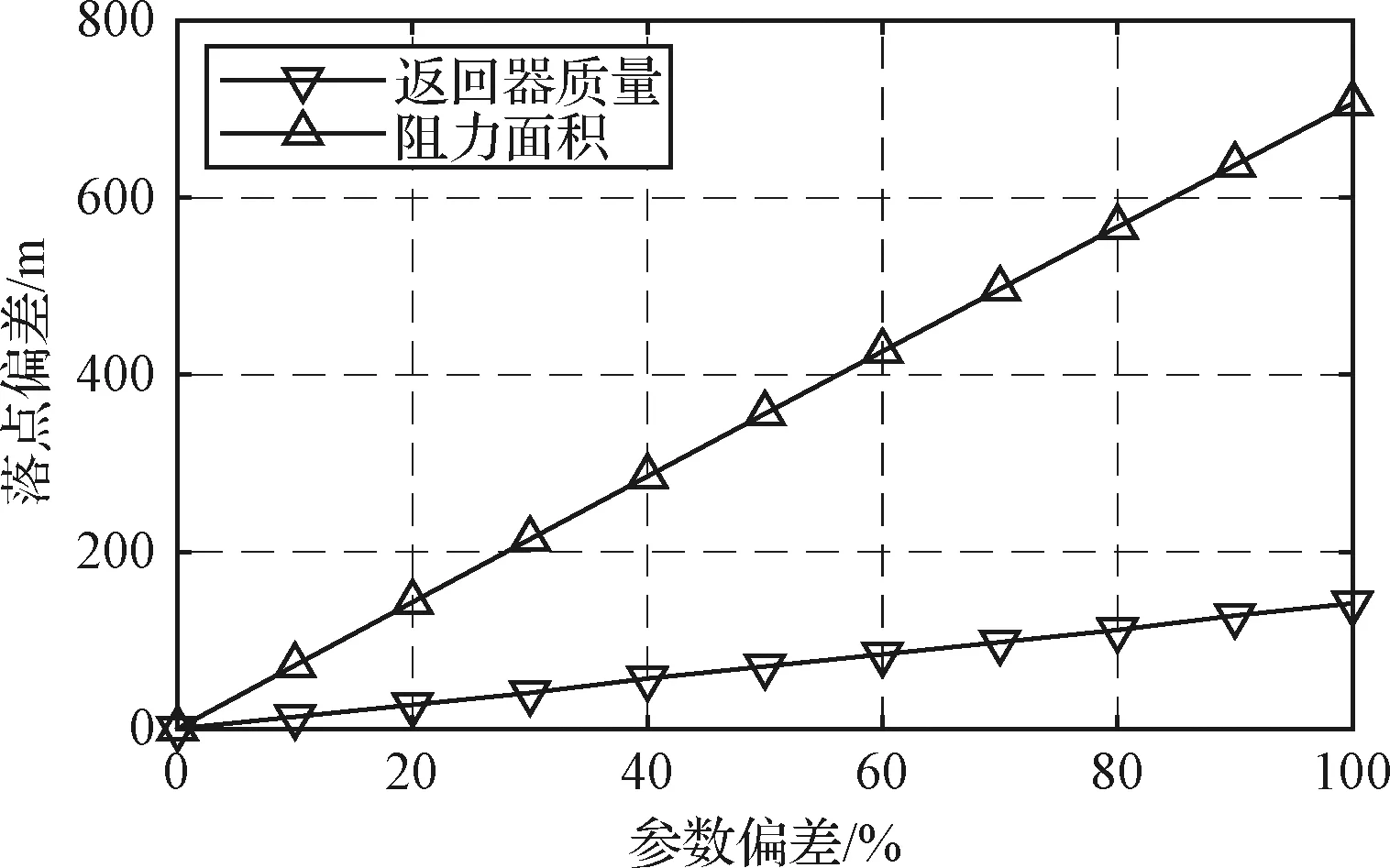
图7 返回器设计参数对落点的影响Fig.7 Curve of landing point deviation vs capsule design parameter
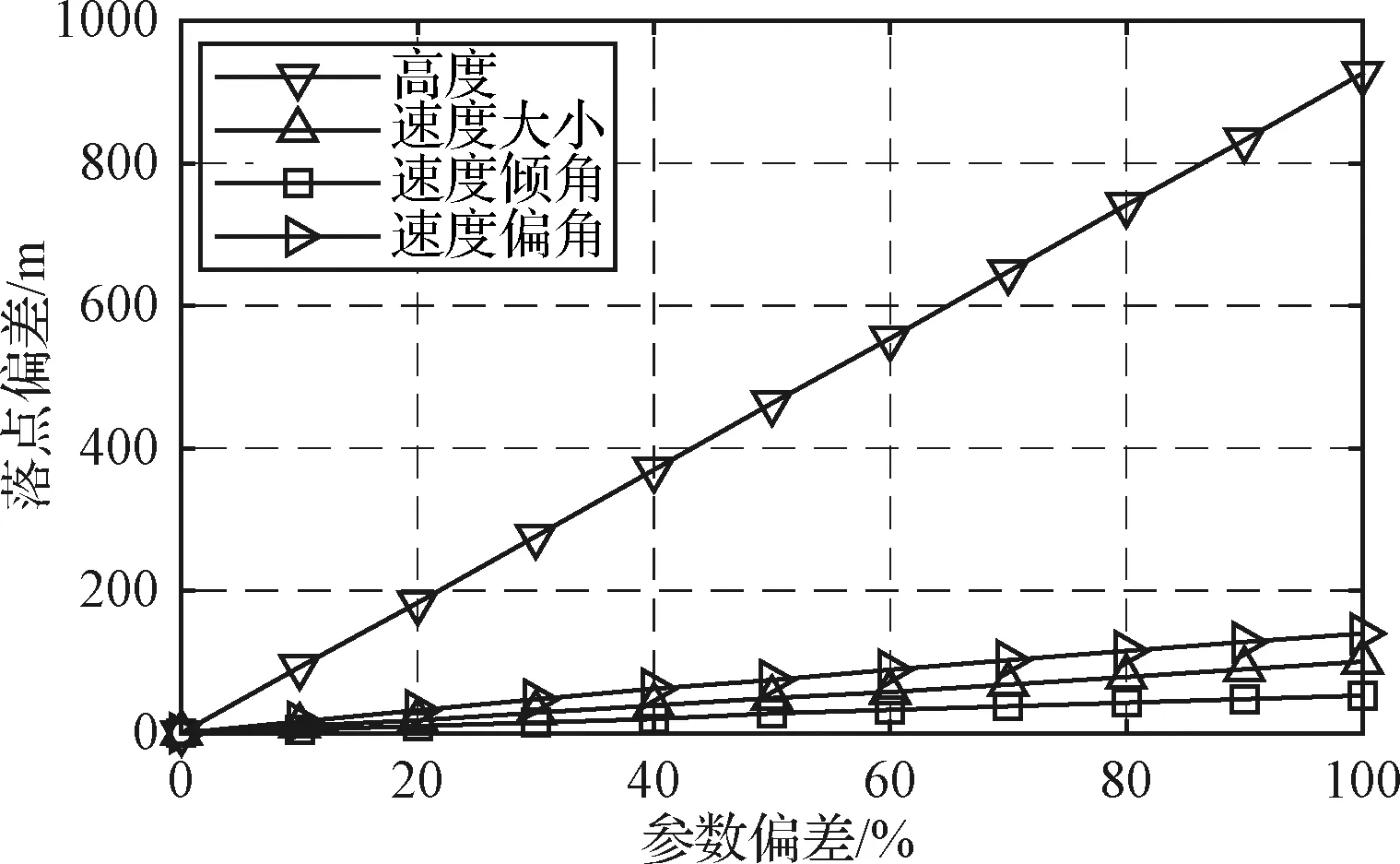
图8 开伞点实测弹道参数对落点的影响Fig.8 Curve of landing point deviation vs opening point data
图9 环境参数对落点的影响Fig.9 Curve of landing point deviation vs wind field parameter
5 结 论
嫦娥第五号返回器的体积小,理论落区大,回收搜索存在一定困难。本文首先建立了返回器回收着陆段高保真动力学模型并结合空投试验进行了验证,而后利用该模型对返回器开伞后飞行轨迹的偏差特性进行了分析得到以下初步结论:
1)所建模型的仿真结果与试验数据基本吻合,数值仿真模型有效,可以用于嫦娥五号返回器的落点预报工作。
2)使用所建模型对偏差量的分析,可以用于评价各偏差量对返回器落点的影响程度,有助于指导相关部门对偏差量精度的针对性控制,提高落点预报精度。
