小麦播种自走式农用移动平台设计与试验
2021-10-12徐琪蒙李洪文王庆杰卢彩云王春雷
徐琪蒙,李洪文,2※,何 进,王庆杰,卢彩云,2,王春雷
(1.中国农业大学工学院,国家保护性耕作研究院,北京 100083;2.中国农业大学农业农村部河北北部耕地保育农业科学观测实验站,涿州 072750)
0 引 言
播种作为农业生产的重要环节之一,其作业效果对农作物的丰产起着决定性的作用。但现阶段机手驾驶拖拉机进行机械化播种,仍然存在人工辅助作业、经验调节误差、土壤压实大和油耗重等问题[1],尚不能完全满足现代农业的需求。此外,中国正面临着快速发展的城镇化和人口老龄化,农业生产劳动力短缺和人工成本大幅度增长等问题日益突出[2]。随着新一代信息技术与农业的深度融合,使用无人驾驶车辆、小型无人机进行自动化作业,可提高作业效率、保证作业精度,解决传统农业受农时、机手经验、人工疲劳等问题的影响,以“机器换人”促进了无人农业的发展。因此,自动控制理论与农业机器人技术已成为国内外研究学者关注的热门研究领域[3-6],针对大田农业播种的无人化需求,发展自动导引车等智能装备,对于提高播种质量、节省劳动力及增加作业安全性等方面均具有重要意义。日本农研机构联合北海道大学[7]采用地磁方位传感器(Geomagnetic Direction Sensor,GDS)和图像传感器设计了一种无人驾驶耕种机器人 Robotra,作业效率是人工驾驶操作的 1.8倍,并根据搭载不同的农具(翻耕机、播种机和水田搅浆机)开发了相应的上位机操作软件,通过远程操作和监督顺利完成小麦播种作业。美国Raven公司[8]推出了一款自走式农用动力平台Omnipower,可灵活搭载播种机、喷药机和施肥机等农具,通过用户手持平板电脑远程控制平台执行自主任务,并具备路径规划和自主避障能力,保证了作业精度和安全性。Lin等[9-10]设计了一种四驱全转向的小麦精密播种机器人,基于Backstepping设计方法和滑模控制思想优化了轨迹跟踪控制器,提高了闭环系统的稳定性,在不同播种速度下,播种合格率大于93%,满足小麦精密播种的农艺要求。国外现有农业自动化车辆的研究虽然已经很成熟,但是机型庞大且价格昂贵[11],尚不能完全适应中国小农经济的分散经营模式;而国内相关研究仍处于起步阶段,研究对象多以末端执行器和机械臂为主,成果多面向设施农业场景。鉴于此,本研究针对大田农业环境,设计了一种自走式农用播种移动平台,通过中央控制系统协调4个伺服电机和4个电动推杆完成平台行走和全轮转向;基于全球导航卫星系统(Global Navigation Satellite System, GNSS)定位测速技术和播深控制技术,设计了电控排种系统和播深控制系统。
1 整体结构及工作原理
小麦播种移动平台整体结构设计如图1所示,主要由平台梁架、小麦播种机构、开沟镇压机构、升降(悬挂)机构、行走机构和控制系统等部分组成。整机外形参数1 500 mm×1 000 mm×900 mm,配套功率1.6 kW,电控系统工作电压24 V,电源动力由两块12 V-100 A.H铅蓄电池串联提供,关键技术参数如表1所示。平台梁架通过升降机构对小麦播种机构进行悬挂,升降滑块的垂直位移变化可带动固定其上的小麦播种机构实现 3~5 cm的开沟深度调整,当下降至目标播深阈值时,将自动触发升降机构基座上的限位开关,停止继续下深。基于 GNSS的电控排种系统,其特点在于以智能转速控制电机取代传统地轮驱动排种轴转动,通过导航控制器内置的高精度定位模块实时测算移动平台的速度,进而线性调控电机转速,控制排种量一致。电控系统以STM32单片机作为主控制器,CAN分析仪作为中继系统传输控制信号,主控对驱动器发出的指令可通过USB-CAN Tool直接进行配置和收发,当前监测的通讯数据和驱动反馈信息都将显示在主控LCD交互显示屏上。

表1 农用移动平台关键技术参数Table 1 Key technical parameters of agricultural mobile platform
1.1 行走方式
农用移动平台作业环境复杂,用途需求多样化,设计时应综合考虑路面适应性、转向灵活性和制造成本等因素,结合目前广泛采用的4种移动机构[12-13],即:1) 轮式:结构简单,制造成本低,负载能力和转向灵活性较好,但车轮与地面接触面积小,在土壤坚实度不足的情况下易发生沉陷和打滑;2)履带式:具有较小的触地压力,在复杂路面行驶仍具有良好的通过性,但机构体积过大制造成本较高;3 )腿式:具有较好的路面适应能力,但协调稳定性较差,且结构复杂、成本过高、负载能力不强;4)混合式:功能全面但结构过于复杂,制造成本高。综合上述 4种机构的特点,选择轮式作为移动平台的行走方式,特别设计了一种全方位轮,车轮可按转向结构进行全轮偏转,在田间作业环境下具备灵活的转向特性,甚至能完成横移、原地回转等动作,极大地缩小了转向半径。
1.2 转向方式
轮式移动平台的转向方式主要可分为铰接式转向、差速转向和车轮转向,目前广泛采用差速转向及车轮转向中的二轮转向控制方法。前者通过控制两侧驱动轮的转速差实现转向,操控简单易实现,但转向半径较大;后者通过直接控制两驱动轮的车轮偏角实现转向,可自由设计车身航向,但转向稳定性不强易发生摆尾现象。针对上述问题,本研究提出了差速-四轮转向耦合的转向控制方法,相比于传统单一转向方式,该法提高了转向的瞬态响应特性,低速行驶时能减少转向半径,提高转向灵活性;高速行驶时能快速响应航向变化且车身摆动较小,更易控制移动平台的姿态。因此,在设计平台转向机械机构时增加了四套车轮偏转装置,采用电动推杆作为转向执行器使车轮按照推杆行程的变化进行全方位转向。在移动平台四驱同步性好且转向空间充足条件下,当目标转角较大时,可采用差速转向;当转角较小时,可采用四轮转向,由控制器直接向电动推杆输出参考位移,使车轮完成对应角度偏转。
1.3 播种方式
小麦精量播种技术是一项利用农机与农艺结合达到有效控制播量、均匀播种的先进栽培技术,根据相关农艺要求:播前地块应保证良好的墒情,且地表平整,土壤疏松、细碎,在整地后没有漏耕;要求播种机播量应能在45~90 kg/hm2可调,播种量不大于135 kg/hm2,各行播量均匀性系数< 3%,播种深度合格率≥80%。本研究设计了基于 GNSS的电控排种系统,其特点在于以智能转速控制电机取代传统地轮驱动排种,由卫星天线实时获取移动平台速度,并通过导航控制器同步调整转速控制电机的输出转速,从而精确控制排种量。作业前,用户可在导航控制器的人机交互显示屏上输入播种量及作业参数,经控制器线性调节电机转速与平台速度之间的变化,自动输出合理转速对排量进行调节;作业结束后,系统识别平台速度降为零,立即停止排种,小麦播种机构经升降结构提至限位开关识别范围内,判断开沟器已离开土壤表面,停止提升并结束作业。
2 关键机械结构设计
2.1 驱动机构设计
2.1.1 驱动原理
常用的驱动方式有电动驱动、气动驱动和液压驱动[14],考虑能源清洁性、密封性和搭载方案可行性,本研究选择电驱动作为移动平台的驱动方式,设计车轮驱动结构如图2所示。伺服电机启动后,输出转速经减速器降速的同时增大输出扭矩,并通过链传动带动车轮轮毂轴转动,车轮的正转、反转使移动平台实现前进、后退动作。链传动结构布置与相邻机械机构互不干涉,同时为避免出现链传动多边形效应,设计传动比i=1,链条张紧程度可根据电机固定座上、下两支撑板之间的相对位移进行调整。
驱动轮数量的设置按照目前广泛采用的两轮驱动、四轮驱动模式进行选择,前者成本低、操控性好,但易造成转向不足;后者越野性强、稳定性好,但油耗大。综合对比两种驱动模式,四轮驱动具有以下优势:1)通过性强。农田行驶过程中当某个驱动轮出现打滑,其余 3个驱动轮仍能保证车辆继续行驶,避免因驱动力不足导致打滑后深陷;2)安全性高。前驱车容易转向不足,后驱车容易转向过度,而四驱车能稳定地使车辆转向保持中性,提高转向能力,保障转弯行驶的安全性。因此,选择四轮驱动作为农用移动平台的驱动模式。
2.1.2 驱动功率计算
轮式移动平台在田间行走时,驱动电机产生的转矩经传动系至驱动轮,地面对轮胎产生一个促使平台前进的驱动力Ft,同时轮胎又受到土壤接触面产生的反向阻力,根据驱动轮的行驶原理分析平台运动机理(如图3)。当移动平台匀速平稳行驶时,作用在平台上的阻力总和应与行驶驱动力Ft平衡,即满足式(1);同时为保证车轮不发生滑转,地面对移动平台法向作用力的极限值Z与附着系数φ的乘积不小于行驶驱动力Ft,即满足式 (2)。
移动平台田间作业速度不高,迎风面积较小,可以忽略空气阻力的影响。滚动阻力、坡度阻力和加速阻力的计算公式如式(3)。
式中f为滚动阻力系数;m为平台质量,kg;a为行驶加速度,m/s2。轮式农业机械在旱地工作时滚动阻力系数可取0.05~0.1,平台质量由表1可得为300 kg,由于平台实际作业时匀速稳定行驶,因此加速度可忽略不计。根据《中华人民共和国水土保持法》规定禁止在 25°以上陡坡地开垦种植农作物,因此取α≤25°。对驱动前轮与地面接触点处取力矩,计算地面对前轮的法向反作用力Fz1,如式(4),并将结果与附着系数φ相乘求得驱动前轮与地面的附着力,当附着力为零时,移动平台将无法爬坡。此时,根据式(5)可分析移动平台的爬坡能力与h和L2的关系,因此为提升移动平台的爬坡能力,控制重心高度适当下降或增加平台重心至后轮的距离。
农业播种平台实际作业还需考虑土壤反作用于开沟器产生的开沟阻力Fs。小麦播种机构采用D=300 mm的双圆盘开沟器[15],试验最大开沟深度H=50 mm,根据参考文献[16]可知,平均作业阻力为13~20 N/cm,由式(6)计算移动平台播种时所受阻力总和,并根据式(7)计算整机消耗总功率。
式中∑F为行驶阻力总和,N;Fs为开沟阻力,N;P为整机功率,kW;v为行驶速度,m/s;λ为传动系机械效率。假设移动平台速度v=1 m/s,机械传动效率为98%。选择电机型号 DSEM-V242030,主要参数如表2所示;减速机配备APE80,减速比30;驱动器选择ARES8020,配备2 500线增量编码器。
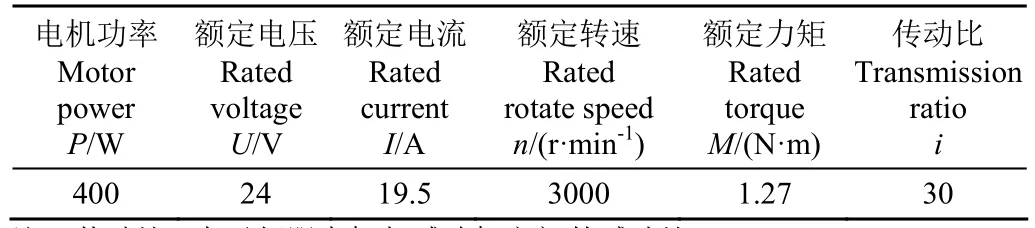
表2 伺服电机主要参数Table 2 Main parameters of servo motor
2.2 转向机构设计
2.2.1 转向原理
农用移动平台车轮转向结构如图4所示。电动推杆内置电机驱动推杆做水平方向的往复直线运动,经独立车轮转向架将运动变为绕回转轴回转的周向运动。转向架上端通过带座轴承与回转轴固定,下端与车轮轮毂连接。该种转向结构,在不平整的农田环境下也具备良好的通过能力和转向能力。全轮精准转向系统能实现较小的转弯半径,甚至无需转弯半径,做出原地转向动作。
2.2.2 电动推杆选型
电动推杆选型时应依据推杆速度、推力和有效导程等参数决定。电动推杆的推力大小主要取决于农用移动平台田间作业时每个车轮轮胎与土壤接触的阻力,推杆导程的选择取决于每个车轮在不发生机械干涉前提下车轮转向角的阈值。选择常州路易电动推杆公司BMXL小推杆系列(带编码器)作为平台转向机构的执行器,由车载电源提供的工作电压确定推杆电压为24 V,并根据车轮转向机构作业时不发生机械干涉的最小安装距离确定电动推杆的导程为250 mm,因此选定电动推杆型号为BMXL250。将导程参数分别代入式(8)和式(9),可得推杆线速度为12 mm/s,推杆推力为1000 N。该电动推杆采用双通道AB相增量式磁编码器,丝杆转一圈为16脉冲。编码器脉冲信号由单片机采集,通过PWM控制电机的启停、正反转,从而精确控制推杆伸缩行程数据。
式中l为导程,mm;na为电机转速,r/min;va为推杆线速度,mm/s;F为电动推杆推力,kN;T为电机扭矩,N·m;Ra为减速比;η为综合传动效率。
3 农用移动平台控制系统
3.1 系统组成结构
稳定准确的控制系统是移动平台完成任务的重要前提,该农业移动平台总体控制系统如图5所示。整体结构主要由检测单元、控制单元、执行单元及监测单元4部分组成。1)检测单元主要包括角度传感器、转速传感器和推杆编码器,负责获取、产生、输出农业移动平台的状态信息,并将检测信号反馈给控制单元;2)控制单元主要包括单片机控制器、CM40L播深控制器、导航控制器,负责运算、处理、判断各种传感器输入信息,并向执行器发送控制信号;3)执行单元主要包括驱动电机和电动推杆,负责输出电机转速和电动推杆行程信息,实现平台的行走和转向运动控制;4)监测单元主要包括USB-CAN Tool软件和单片机LCD液晶人机交互显示屏,负责监测、反馈移动平台当前状态至控制单元。
3.2 单片机控制结构
农业移动平台采用 STM32F103ZET6单片机作为控制系统的主控制器,以CAN总线技术向伺服电机驱动器自动发送控制指令,实现四轮同步行走和差速转向功能。CAN分析仪作为中继系统传输控制信息,可以利用 USB-CAN Tool工具软件直接进行CAN总线的配置、发送和接收,并实时监测主控对驱动器发送的指令,当前通讯数据和驱动反馈信息均可显示在单片机LCD人机交互触摸屏上。
单片机作为连接上位机和执行机构的重要中枢,在本研究中主要功能是控制伺服电机和电动推杆的运动,并在平台行驶过程中获取转角信息和速度信息,主要包括4个模块:1)信息交互模块:单片机通过RS485通讯串口与上位机实现信息数据的交互,并通过CAN总线与其他模块进行数据交换,即通过单片机串口的收断状态实现信息流传递;2)数据采集模块。可实时获取角度传感器和速度传感器的作业数据,具备采集、显示与反馈等功能;3)运动执行模块。该模块主要作用于伺服驱动电机和电动推杆,其一功能是将目标速度信号转化为驱动伺服电机的报文指令,其二功能是将目标转角信号转化为电动推杆的行程量数据;4)电机驱动模块。该模块主要针对 4台驱动电机的初始化和运动控制[17],在速度模式设定下由CAN总线向4台驱动器发送速度指令,使电机按目标转速转动。
3.3 驱动控制系统
基于 STM 32单片机技术设计了移动平台行走机构的驱动模块,采用 PID控制算法协调各车轮在行驶和转向时的速度和转角,控制信号由CAN总线发送给伺服电机控制器和执行器。采用CAN总线目的是为了实现平台控制部件的智能化和控制系统的网络化,并为以后的功能拓展留有足够余地。
驱动系统根据指定路径按照T型加速策略进行速度控制,运动过程采用PID算法调节伺服电机的转速以达到平台整体稳定。搭配完善的上位机驱动系统软件 Motion Studio,可对伺服电机进行数据监测和运动控制,并通过示波器显示电机运动过程中实时生成的速度、位置、电流等波形曲线,支持数据、波形文件的存储和导出。
3.4 转向控制系统
3.4.1 转向模型
假设移动平台车轮运动时与地面接触为纯滚动而无相对滑动,前轮转向时后轮也配合前轮做一定角度的偏转,此时转向更稳定,转弯半径也更小。平台高速转向时,前后轮同向偏转易发生侧滑,因此确定前后轮互为反向偏转,且内侧车轮转角比外侧车轮转角大。平面内二自由度反向四轮转向模型如图6所示。
该模型满足阿克曼转向几何原理,转向时四轮围绕同一中心点作纯滚动圆周运动[18-20]。转向中心位于车身转向一侧,四轮面向转弯中心且轴心线互为相交,通过同一瞬心轴线,投影为O′点。水平投影面内,车身绕瞬心O′点转动,同时转弯半径R随偏转程度变化,四车轮转向角的表达关系如式(10)。
当αA = αB时,内侧的前、后轮偏转角大小相同、方向相反,且运动轨迹相同;当αC = αD时,外侧转向轮亦同理。该模式下平台全方位转向效果最佳。简化图6为二轮模型,以前轮为例,研究同一水平轴线上不同侧车轮的偏转角关系如式(11),其中W为已知参数,代入得前轮到瞬心的水平距离L1,以及内侧车轮到瞬心的距离d,如式(12)所示。
计算平台前轮线速度与偏转角之间的关系,如式 (13)所示。同理后轮线速度与同侧前轮的大小相同。
式中VA和VD表示车轮线速度,m/s;ω为平台转向角速度,rad/s。
当移动平台行至地头时,行驶速度降低,为保证在非作业区完成准确的邻接行距、较小的转弯半径以及灵活的转向操控,可采用前后轮同向偏转的四轮转向方式,即蟹形转向[21]。该转向方式下各轮的偏转角度相同,即αA=αB=αC=αD,灵活操纵平台实现侧向运动,甚至横向运动,能有效减小转弯半径,缩短转向时间。当转向半径较大时,各车轮转角等于转向控制器命令转角,此时由前轮驱动方式完成小角度的转向任务[22-24]。
3.4.2 转向策略
转向时,移动平台采用差速转向和电动推杆转向两种方式。差速转向时,两差速轮之间的驱动器通过CAN总线联网通讯,实现联动控制功能;控制器轨迹规划采用 PVT(Position,Velocity,Time,缩写为 PVT)轨迹模式实现两轮插补,该模式控制精度更高,两轮同步性更好。控制器对于差速轮的控制可采用位置控制和速度控制两种模式:1)速度模式下,控制器可在每个 PVT点根据两轮实际速度进行速度补偿,使两轮速度保持一致,从而对前进方向的偏移进行纠正;2)位置模式下,可直接指定平台前进坐标,控制器会自动进行轨迹规划并走到指定坐标,另外也可指定拐弯半径和弧度,实现运动中拐弯。伺服电机驱动器采用了速度环前馈的控制模式,能提供较好的动态性能,加大惯量系统的动态响应特性,最终将速度误差稳定时间控制在较优水平。
电动推杆转向时,通过PWM控制推杆电机的启停和正反转。单片机采集推杆编码器(霍尔传感器)的脉冲信号调节推杆电机转角,并通过电动推杆内部换向装置将电机的旋转运动转化为推杆的直线运动,并基于图4设计的转向结构,将推杆行程变化量经独立车轮转向架变为车轮偏角变化量。控制器路径规划的角度偏差可在两种转向方式间切换最优方案,并由霍尔传感器监测实际转角进行转向控制。移动平台路径跟踪控制多采用PID控制方法,其具有控制效果好、鲁棒性强、算法参数简明等优点;但是在系统运行过程中会出现非线性的变化,以及超调量和响应时间矛盾的问题[25],农业移动平台路径跟踪控制为非线性控制,且工作环境信号扰动较大,鉴于上述问题本文采用模糊控制算法[26-28],该算法对模型精度要求不高且对误差不敏感。设计偏转量决策的模糊控制器原理如图7所示,输入量为移动平台与目标路径之间的横向偏差Δe和航向偏差Δφ,输出量为电动推杆电机转角值u,设定平台前进方向左侧为负,右侧为正,横向偏差Δe量化等级为{ -3, -2, -1, 0, 1, 2, 3},航向偏差Δφ量化等级为{-15, -10, -5, 0, 5, 10, 15},电机转角u量化等级为{-3, -2, -1, 0, 1, 2, 3},模糊语言值均为{NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中),PB(正大)},建立模糊控制规则库如表3所示。最终求出电机转角的精确解,并将其发送至单片机控制车轮的偏转运动。

表3 模糊控制器规则表Table 3 Table for fuzzy control rules
4 GNSS电控排种系统
智能精播系统主要由导航控制器、卫星天线、限位开关和智能转速控制电机等组成。高精度定位模块内置北斗/GPS/GLONASS三系统单频定位,可根据卫星天线接收的信号实时测算平台的速度信息。作业时只需在人机交互显示屏上输入目标播种量,控制器即可自动计算电机转速,且能根据不同作业需求设定不同转速比例。智能转速控制电机取代了播种机构原先地轮驱动装置,固定在种箱驱动装置位附近的梁架上,并通过链传动驱动排种。限位开关固定在升降机构的基座上,播种时不会接触发开关;但上升离开地面后能够准确触发限位开关,立即停止排种。人机交互显示屏能动态显示当前行驶速度和系统状态,系统异常时,蜂鸣器会自动开启报警功能。
4.1 排量精准控制
播种移动平台采用外槽轮排种器进行小麦条播,3个排种器间的播种行距设定为 150 mm,根据 JB/T 9783—1999G给出的外槽轮排种器排种性能指标,计算排种器平均排量。手动调节排种轴使小麦排种器至最大下种量,模拟实际排种转速0.6 rad/s旋转排种轴分别测定10、20、30次排量,每组测试重复3次,然后摘取导种管出口端的集种袋,对袋内种子质量进行称取,经计算确定该外槽轮排种器平均排量为13 g。
由于传统小麦条播种距不均匀,播行内种子重叠拥挤,易出现欺苗现象。因此,本研究采用 GNSS电控排种系统自动调节播种作业中的实时排量,即使平台行驶速度发生改变,排种电机也能自动调整转速控制小麦排量。系统有两种数据计算模式:一种是根据排种量计算电机转速,另一种是根据排种间距计算电机转速。每转排种量的设置需要实际称量,称量时将排种器的排种量调节至最大,手动旋转排种齿转轴,多次取样获得平均排种量;每公顷排种量则根据用户需求设定。作业时,排种量随平台行驶速度变化自动调节。电机转速九级可调,保证单位面积内的排种量均匀,减少重播率和漏播率。
4.2 播深精准控制
采用直线升降导轨代替传统吊臂控制小麦播种机构的离地高度,圆盘开沟器随之开出不同深度的种沟。主控制器 CM35D通过调节步进电机转角控制滑块沿着丝杠导轨进行垂直升降运动,同时滑块与小麦播种机构的梁架固定,从而实现小麦播种深度的准确控制,保证双圆盘开沟器均匀开出30~50 mm的种沟。
5 试验与结果分析
5.1 四轮驱动控制测试
5.1.1 测试方法
为验证移动平台驱动行驶时的控制效果,需测试车轮实际转速,分析四轮同步驱动的控制精度。根据参考文献[29-32],多电机同步控制研究,本试验主要测定四驱动轮电机在负载扰动下的稳定性及电机间实际转速同步性,分析平台在直线行驶时的控制效果。平台行驶过程中搭载上位机 PC同步监测伺服电机的实际转速与转速误差,通过RS485串口通讯实现PC与伺服电机编码器之间的数据传输。根据电机空载预实验结果参考,设定测试转速分别为0.6、0.8、1.0 rad/s 3个档位,行驶方向为平台开沟器实际播种方向。
5.1.2 测试结果及分析
总在不同档速下的测试过程中,四台驱动电机启动平稳、行驶流畅,链传动准确可靠均未出现卡顿现象,根据车轮行驶轨迹测量移动平台与目标路径之间的横向偏差最大值为2.2 cm。上位机调控软件MotionStutio可随车监测试验数据,并通过示波器功能对实际速度值、目标速度值以及速度误差进行实时记录。将测试中采集的实际转速数据与目标转速进行对比,分析跟踪速度误差变化及电机同步速度误差ε12、ε23、ε34、ε41。转速控制过程响应曲线如图8所示。由图中驱动电机转速变化曲线可知,平台运行启动时间约为3 s,此时间用于填充发送缓冲区,在驱动控制程序中以延时函数的形式被设置在电机使能程序之前,用于校验通讯命令的返回代码,若返回命令与通信命令相同,则表示通讯成功,继而进入电机使能阶段。电机获得速度指令后,实际转速约在2.6 s后趋于目标转速并逐渐稳定,但由于电机自身转差率的存在,实际转速曲线会围绕目标转速值上下波动,但基本处于稳定控制状态,表明电机运转后响应速度快、灵敏度高,且转速误差较小基本满足设定目标转速要求。
多电机协同控制策略的优劣,由同步速度误差这一评价指标来衡量,用以反映电机之间的转速差,误差值越小,电机的同步性能越好[31]。电机之间的同步速度误差关系如式(14)所示,以运行时间为变量,动态地反映某一时刻相互两台电机之间的实际转速差,衡量两者之间的速度一致性。由图8可知,任意两台电机之间的同步误差在 0值附近往复波动,并稳步趋于转速同步。测试结果表明,该驱动系统可在负载扰动下快速趋于稳定,且四台电机运转时具备较好的速度一致性,同时平台具有较强的抗干扰能力和较好的同步性。
式中,ε12、ε23、ε34、ε41表示两台电机之间的同步速度误差,r/min;ωi(i=1,2,3,4)表示第i台电机实际转速,r/min。
5.2 电动推杆转向控制测试
5.2.1 测试方法
移动平台转向系统的准确性影响着实际播种作业的对行效果和转弯半径,因此需验证电动推杆转向方式下的控制精度,对转向轮的实际偏转角度进行测验。通过STM32单片机向电动推杆的编码器发送脉冲信号,控制推杆行程量,以此调节车轮的转角。基于测速试验过程,在上位机串口控制软件内分别设定不同的角度值,通过多次测量实际反馈数据并求取转角平均值,分析实际转角的控制精度[33]。
5.2.2 测试结果与分析
转向轮电动推杆的最大推力为1 000 N,沿顺时针、逆时针方向最大行程均为125 mm,在转向控制过程中丝杆以12 mm/s的推速带动车轮偏转,行程至单侧转角阈值所需最长时间为10.4 s。由表4分析可得,电动推杆控制车轮在实现360°转向测试过程中,转向控制的最大平均绝对误差μ=0.77°,最大标准差约为 5°,转角的绝对误差值基本满足转向目标控制要求。但随着目标转角逐渐增大,从标准差的变化来看,转向控制稳定性却相对减弱。当转向角度较小时,标准差σ< 0.5°,满足车轮在小角度转向要求时的控制精度;当转向角度设定较大时,虽然绝对误差仍不大于1°,但是控制稳定性明显不强。因此,在车轮转向角度较小的情况下,由主控制器发送的转角指令可直接转化为电动推杆的位移量输出,使转向车轮以给定目标角度随动。该电动推杆转向控制方式能在差速转向方式的基础上提高转向控制精度,闭环控制响应稳定可靠。

表4 车轮转角控制试验结果Table 4 Test results of wheel deflection angle control
5.3 排量稳定性与播深稳定性试验
5.3.1 试验条件及设备
为检测 GNSS电控排种系统和播深控制系统的可靠性和稳定性,于河北涿州保护性耕作试验田开展小麦排种量和播种深度控制试验。试验地块具有较好的土壤坚实度,能可靠地承载该移动平台在田间顺利行驶,保证车轮不会深陷土壤原地打滑,土壤表面混有少量秸秆残茬,田间试验情况如图9所示。小麦试验品种选用烟农19,千粒质量约 40 g,麦粒尺寸形态近似椭圆体,基本符合正态分布;小麦排量称量设备采用 OHAUS公司ARA520型电子天平,称量范围0~1 500 g,精度0.01 g;播深测量尺精度0.1 cm。
5.3.2 试验方法
小麦排种量控制试验以排量稳定性变异系数作为试验指标。进行排种试验前,首先在 GNSS电控排种系统的人机交互屏上配置本次作业参数,分别设置每转下种量、每公顷下种量、幅宽和传动比等,系统根据下种质量自动配置智能转速控制电机的转速。设定下种量为206.25 kg/hm2,幅宽0.5 m。系统启动后约30 s接入GNSS卫星定位信号,并在人机交互界面显示当前行驶速度。根据5.1.1设定的驱动电机三档转速,将其对应换算为移动平台的行驶速度0.7、1、1.2 r/min进行排量试验,行驶距离均为5 m,每组重复3次。每次排种试验结束后,将各行种管所对应的集种袋依次取下并进行称量。
小麦播种深度控制试验以播种深度合格率和播深稳定性系数作为试验指标。进入田间作业前,通过人机交互控制器 CM35D向步进驱动器发送运动指令,调节步进电机的旋转圈数,控制丝杠滑块行程变化从而带动小麦播种机构整体下降 40 mm,保证双圆盘开沟器开出对应土壤沟深。试验以1 m/s行驶速度在田间完成两次往复的直线对行播种,对测定地块沿对角线等距离随机选取5个测区,测区宽度为1个工作幅宽,长度为5 m,每个测区内随机取10个测点,测点位置应避开地头和边缘,以耕后地表为基准测定播种深度,并根据式(15)计算试验指标。
式中X1为播种深度合格点数;X0为测定总点数;A为播种深度合格率,%;Xi为测量点i的播种深度,mm;X为平均播种深度,mm;N为测量点个数;S为测量值标准差;V为播种深度变异系数,%;播种深度稳定性系数U=1-V。
5.3.3 试验结果及分析
排种量控制试验过程中,GNSS电控排种系统稳定可靠,排种响应时间短,测试结果如表5所示。智能转速控制电机带动排种轴同步转动,驱动转速的不同会影响排种量,从而对排种精度造成影响,随着移动平台行驶速度的增加,相同行驶距离内排种量也越大,排量稳定性变异系数不断减小。根据JB/T 9783—1999《播种机外槽轮排种器》要求用于小麦播种的外槽轮排种器的排量稳定性变异系数≤1.8%,本试验结果满足规范性能指标要求,各行排量一致性较好,电控排种控制系统稳定可靠。

表5 排量稳定性试验结果Table 5 Test results of sowing quantity stability
播种深度控制试验过程中,观察土壤开沟播种痕迹,沟内种子呈连续分布状态,种粒无明显堆叠,播行均匀无断条现象,测试结果如表6所示。通过分析可知,设定播种深度为40 mm时,在不同的测区之间测量最大播深平均值为44.2 mm,最小播深平均值为37.7 mm,实际播深的误差绝对值不大于10 mm,播深合格率≥90%。根据NY/T 996—2006《小麦精少量播种机作业质量》标准中播种深度合格率≥80%的要求,满足小麦播种深度性能指标。综合试验表明,实际播种深度虽有波动,但稳定在一个变化范围内,以播种深度40 mm为试验,播深变异系数不大于11%,播深控制系统的稳定性系数≥89%,大于标准要求的 80%。测试系统控制精度较高,能满足机器人在田间自走作业时对播种深度稳定性的要求,具有可靠的播种控制效果。

表6 播种深度稳定性试验结果Table 6 Test results of sowing depth stability
6 结 论
1)通过 CAN总线分布式控制完成上位机软件、主控制器与驱动电机之间的指令传输,采用 PID调速算法保证四轮电机协同性和稳定性,完成移动平台直行控制、速度调节、差速转向等功能,实现自动行走。该农业机器人驱动控制系统具有较强的抗干扰能力,通过上位机设定目标转速后,四轮可快速趋于目标转速且同步性较好,机器人车身偏航距离误差小于 2.2 cm,保证了行驶直线度以及四轮同步驱动的协同性、稳定性。
2)采用GNSS高精度定位模块实时获取播种移动平台的行驶速度,并线性调控排种轴驱动电机转速,实现小麦排量的自动、精准控制,小麦排种连续稳定,排量稳定性变异系数不大于1.80%,满足0.7~1.2 r/min行驶速度下排量稳定性要求;通过控制丝杠导轨悬挂机构的下降运动使圆盘开沟器准确开出40 mm的土壤沟深,实际播深的误差绝对值小于 10 mm,播深稳定性系数≥89%,满足播种深度的精准控制要求。
3)结合对角差速与电动推杆结合的转向控制方法,能够在不平整的土壤条件下保持良好通过能力和转向能力。当转角较大时,采用差速转向控制方法,主控制器分别设置差速电机转向速度,并通过CAN总线将速度指令输出给对应驱动器,通过电机之间的转速差,实现转向;当转角较小时,采用机械电动推杆转向控制方法,由单片机控制器控制推杆行程变化,并通过采集编码器脉冲,实现车轮转向的闭环控制,转向行程最长转向时间为10.4 s,转角最大平均绝对误差小于 0.77°,标准差小于0.5°,满足车轮在小角度转向要求时的控制精度。
目前本研究仅针对该农用移动平台搭载小麦播种机构直线行驶时的实施情况,重点验证平台可靠性和直线播种稳定性。但仍存在例如地头自动转向控制、小麦播种行线提取等技术问题尚未完善,将在后续研究中继续展开。
