六自由度机械手静力学分析
2021-10-11毕方淇王文丽张立凯陈金利张荣彬
□ 毕方淇 □ 王文丽 □ 张立凯 □ 陈金利 □ 蒋 鑫 □ 张荣彬 □ 李 志
淄博市农业机械研究所 山东淄博 255000
1 分析背景
近年来,工业机器人在各行各业应用和普及,极大促进了我国迈入工业4.0的智能化进程。在这一过程中,机器人的研究应用占据重要位置。机器人是我国智能装备、智能农业的重要基础和组成部分,但我国机器人研究起步较晚,技术相比国外还有一定差距,我国对机器人的研究依然任重而道远[1-4]。
六自由度机械手是一种较为常见的工业机器人,有较为严格的工作精度和结构刚度要求。对六自由度机械手各零部件进行研究,获得相应零部件的刚度、应力、应变情况与变化规律,对确保六自由度机械手稳定运行有重要作用。
在文献[5-6]所进行的机械手分析中,采用的分析模型过于简化,模型中未提供机械手内部结构,较难反映机械手受力后的真实情况。樊炳辉等[7]分析的机械手自由度较少,与六自由度机械手结构有较大差异。文献[8-9]所做研究与笔者所分析的六自由度机械手结构差别较大,且针对六自由度机械手框架式零部件的结构验证与分析较少。
笔者以典型六自由度机械手为研究对象,应用SolidWorks软件建立几何模型,应用Workbench软件进行静力学分析,获得六自由度机械手大臂和小臂刚度、应力、应变云图,验证六自由度机械手零部件的合理性,为后续设计和改进提供数据参考。
2 力学理论
根据六自由度机械手受力情况,其零部件受力后变形为弹性变形,不应出现塑性变形。由此,仿真分析中涉及弹性力学平衡微分方程、几何方程和物理方程[10]。
2.1 平衡微分方程
平衡微分方程为:
(1)
式中:σx、σy、σz为主应力;τxz、τyz、τyx、τzx、τxy、τzy为切应力;x、y、z为单位体积上作用的体积力F在三个坐标轴上的分量。
2.2 几何方程
几何方程为:
(2)
(3)
式中:u、v、w为表征质点相对于三个坐标轴方向的位移量;εx、εy、εz为主应变;γxy、γyz、γzx、γyx、γzy、γxz为切应变。
2.3 物理方程
物理方程为:
(4)
式中:D为弹性矩阵;E为弹性模量;μ为泊松比。
3 几何模型结构
六自由度机械手的结构较为复杂,需要考虑完整支撑、旋转、连接、固定等功能。虽然有限元仿真时需要对六自由度机械手的结构进行简化,但是设计过程中应对六自由度机械手的结构进行完整、详尽设计。六自由度机械手几何模型如图1所示。

图1 六自由度机械手几何模型
4 网格划分
根据六自由度机械手几何模型,对六自由度机械手的大臂和小臂单独建模,如图2所示。
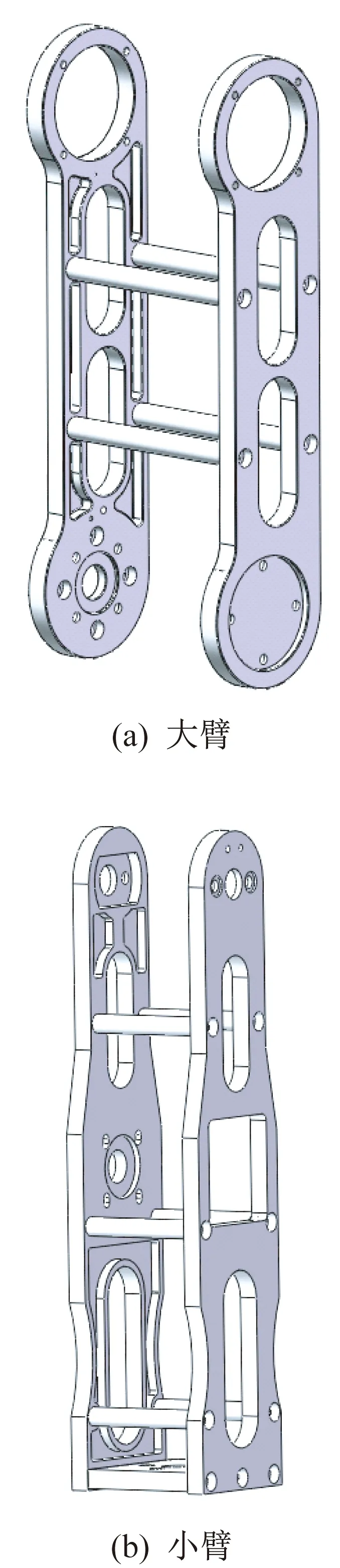
图2 结构单独建模
为保证有限元网格划分的精度和经济性,对大臂、小臂模型进行如下简化:
(1) 将倒角和倒圆角简化为直角;
(2) 将孔底118°锥角简化为平面;
(3) 大臂、小臂左右侧板与直杆之间无间隙;
(4) 对某些不影响结构强度的较薄位置适当加厚,以减少网格数量。
网格划分时,网格大小为5 mm,划分方式为自由划分。网格划分参数见表1。
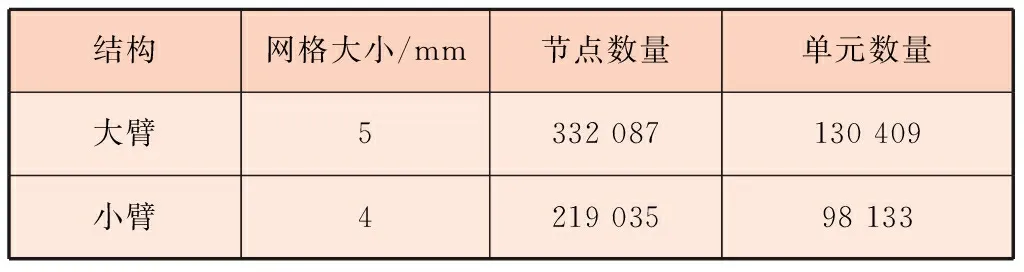
表1 网格划分参数
大臂、小臂模型网格划分后的局部情况如图3所示。
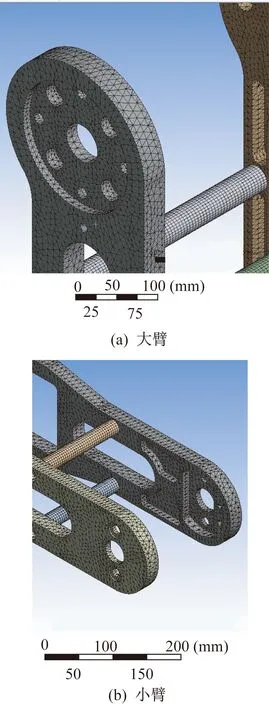
图3 模型网格划分
5 静力学分析
大臂、小臂的材料为铝合金,力学参数见表2。

表2 铝合金力学参数
分别按照大臂和小臂在水平、竖直两个方向极限位置施加静力载荷[5],载荷大小为后续结构质量。根据重力方向,将不同方向的载荷乘以负载因数2.4,分别施加给大臂和小臂。经计算,大臂的质量为46 kg,则其受力为1 081.92 N;小臂的质量为11 kg,则其受力为258.72 N。
固定大臂和小臂与上一级结构活动关节部位,在大臂和小臂关节端分别施加载荷。
水平放置的大臂刚度、应力、应变云图如图4所示,竖直放置的大臂刚度、应力、应变云图如图5所示。
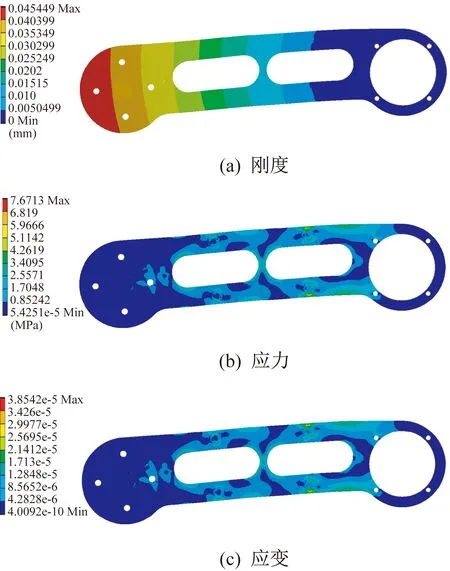
图4 大臂水平放置分析云图

图5 大臂竖直放置分析云图
水平放置的小臂刚度、应力、应变云图如图6所示,竖直放置的小臂刚度、应力、应变云图如图7所示。
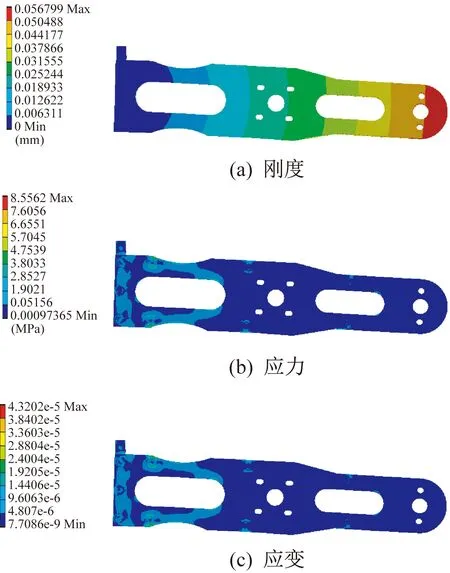
图6 小臂水平放置分析云图

图7 小臂竖直放置分析云图
根据分析结果可以看出,大臂和小臂在水平或竖直方向受力时,刚度均较好,大臂在水平放置时最大变形为0.045 mm,小臂在水平放置时最大变形为0.057 mm,可以满足零部件使用要求。对大臂和小臂的应力、应变进行分析,可以得到应力、应变均在安全范围内,最大应力出现在螺栓沉头孔边缘尖锐处,在此处增加倒角或倒圆角,可以有效改善应力分布。通过分析确认,大臂和小臂可以满足使用要求。
6 结束语
笔者对处于水平和竖直放置的六自由度机械手大臂和小臂进行了静力学分析,获得刚度、应力、应变云图。通过分析确认,现有结构可以很好地满足六自由度机械手的使用要求。所做分析为后续类似机械手的研究设计提供了数据参考。
