基于自适应滑模观测器的新型快速锁相环设计
2021-10-10杨小柳
李 海,杨小柳
(1.中山职业技术学院机电工程学院,中山 528404;2.贵州大学电气工程学院,贵阳 550025)
对于电网电压频率和相位检测问题,学者们提出了各类锁相环PLL(phase-locked loop)方案[1-12],技术途径有PI 调节器[4]、离散傅里叶变换[5]、复数滤波器[6]、正负序分离算法[7]、卡尔曼滤波器[8]、自适应陷波滤波器[9]和加权或递归最小二乘算法[10-12]等。其中最小二乘算法由于需进行矩阵求逆运算,计算量大,故实用性一般;卡尔曼滤波器虽然锁相效果很好,但是参数估计复杂,且需事先处理协方差矩阵,运算过程中也存在矩阵求逆,而n 阶矩阵求逆需进行n3次乘除运算或n3-2n2+n 次加减运算,这对计算芯片要求较高。
传统PLL 方案具有结构简单和计算负担小等优点,得到广泛使用[13]。传统PLL 在电网正常条件下的锁相性能很好,但实现快速动态响则是以牺牲干扰抑制能力为代价的,而且在相位或频率闪变不确定和扰动情况下,锁相性能严重下降。为了克服这些限制,针对传统PLL 的改进方案有诸多报道,改进措施主要施加在传统PLL 的相位检测部分中。文献[14]提出了一种增强型PLL,在相位检测部分使用直流偏移积分器以消除输入直流偏移,使用延时滤波器以消除输入谐波和不平衡的影响,但滤波会引入延迟,从而影响最终的动态性能;文献[15]实现了一种相位和频率检测解耦的快速PLL,增设了前置滤波以提高锁相快速性,但滤波模块造成的相位误差需要进行补偿;文献[16-17]设计了一种基于二阶广义积分器SOGI(second-order generalized integrator)的PLL,通过使用2 个自适应权重系数来改善增强型PLL 的动态性能,然而其包含Park 变换及其逆变换,计算量较大,同时相位检测部分使用了低通滤波器,动态响应减缓;文献[18]针对永磁同步电机失磁问题提出了一种改进自适应律结合滑模控制的思路,克服了传统自适应观测器准确性的局限;文献[19]围绕感应电机无速度传感器控制,设计了一种改进型指数趋近律的滑模观测器,利用可变增益实现了观测器对系统状态的自适应控制,可有效缓解抖振问题。虽然自适应滑模观测器适用于电力传动领域,但其设计思路仍可用于其他场景。
在前述文献研究基础上,本文设计了一种基于自适应滑模观测器的新型快速PLL 方案。自适应滑模观测器同时使用线性和非线性输出注入项,线性部分确保系统稳定性,非线性部分在可增强针对参数不确定性和测量噪声的鲁棒性的同时,线性注入有助于缩短收敛时间,提高PLL 的动态响应速度。对于单相电网电压信号,具有频率适应性的滑模观测器可以准确而迅速地估计其相位和频率。然后进行了新型PLL 方案的Lyapunov 稳定性分析。最后,通过与增强PLL 和基于二阶广义积分器的PLL 对比实验,验证所提PLL 的性能。
1 基于自适应滑模观测器的新型PLL设计
单相电网电压ug可描述为

式中:U 为单相电网电压的幅值;ω 为角频率;θ 为瞬时相位,θ∈[0,2π)。观测器的作用是在各种干扰如相位、频率或幅度闪变的情况下仍可准确迅速地估计出ω 和θ。式(1)的状态空间形式为



进一步参数估计,误差可定义为eν=-ν。对于误差e 和eν,考虑设计Lyapunov 函数为

式中:μ 为增益参数;V(e,eν)为Lyapunov 函数。对V(e,eν)求导得
进一步推导可得

由式(9)可选择出自适应参数更新律为

从而,式(8)改写为

对于任意K>0,且任意L 满足Re{λ(A-LC)}<0 的情况,其中,λ(A-LC)为矩阵A-LC 的特征根,Re{.}代表特征根实部,除原点(平衡点)以外,式(11)等号右边总是小于0,即

至此,证明了闭环系统即观测器式(4)和自适应参数更新律式(10)的全局稳定性。使用和,可计算出状态向量x 和瞬时相位为

综上,式(5)、式(10)、式(13)和式(14)构成了基于自适应滑模观测器的新型PLL 方案,其框图如图1 所示。

图1 基于自适应滑模观测器的新型PLL 框图Fig.1 Block diagram of novel PLL based on adaptive sliding mode observer
2 仿真和实验验证
为了验证新型PLL 的性能,利用Matlab/Simulink软件平台开展仿真测试,自适应滑模观测器在Simulink 中实现,求解器为Runge-Kutta,采样频率10 kHz。基于实时仿真平台dSPACE 1104 搭建实验系统,如图2 所示,并开展实验测试。
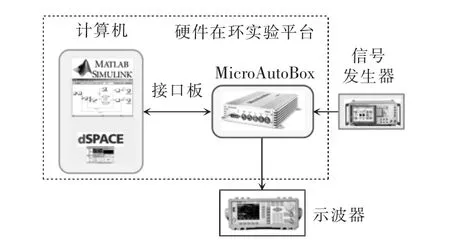
图2 硬件在环PLL 测试平台Fig.2 Hardware-in-the-loop PLL test platform
首先,在Simulink 仿真平台中对所设计新型PLL 开展仿真测试,以验证其功能。仿真测试条件设置为:单相电网电压信号ug同时发生相位60°跳变和幅值25%的降低。图3 为新型PLL 作用下的频率和相位估计仿真结果,从图中可以看出,新型PLL 的响应响应时间较快,锁频调节时间小于50 ms,最大频率误差小于15 Hz,锁相调节时间小于5 ms,最大相位误差小于30°。

图3 新PLL 方案仿真测试结果Fig.3 Simulation test results of novel PLL scheme
为突出本文所提基于自适应滑模观测器的快速PLL 即ASMO-PLL(PLL based on adaptive sliding mode observer)的性能,选择增强型PLL 和基于SOGI的PLL 即EPLL[14]和SOGI-PLL[17]进行对比。将3 种PLL 方案在实时仿真平台dSPACE1104 构成的实验系统上开展对比实验测试。具体的锁相环实验测试条件设置为:Ⅰ.单相电网电压信号的频率从50 Hz阶跃突变至52 Hz;Ⅱ.单相电网电压信号的相位从0°阶跃突变至-20°,见图4;Ⅲ.单相电网电压信号的有效值从311 V 阶跃突变至368 V。

图4 测试Ⅱ的单相电网电压信号波形Fig.4 Waveform of single-phase grid voltage signal in TestⅡ
3 组实验测试的结果分别如图5~图7 所示。图5 表明,测试Ⅰ中ASMO-PLL 在频率突变时具有更快速准确的响应,其中ASMO-PLL 作用下频率跟踪达到稳态时间为17 ms,EPLL 和SOGI-PLL 分别需42 和55 ms;相位误差方面,ASMO-PLL 可在1 ms达到3%误差带,而EPLL 和SOGI-PLL 分别需要8和50 ms 左右。

图5 PLL 方案测试Ⅰ结果Fig.5 Results of PLL scheme in Test Ⅰ

图6 PLL 方案测试Ⅱ结果Fig.6 Results of PLL scheme in Test Ⅱ
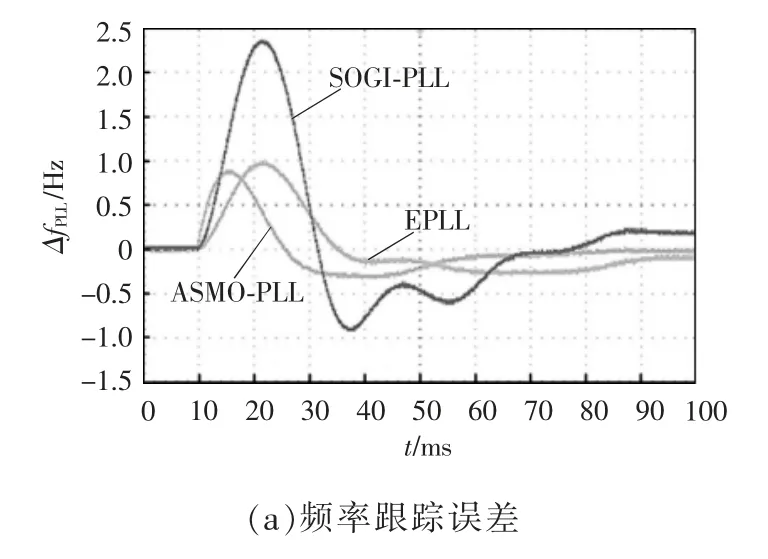
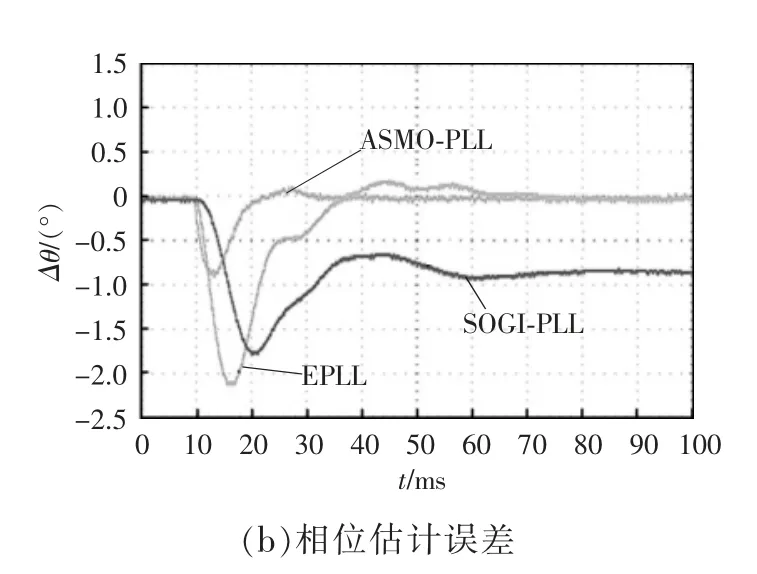
图7 PLL 方案测试Ⅲ结果Fig.7 Results of PLL scheme in Test Ⅲ
图6 中测试Ⅱ的结果显示,相位突变也将带来锁相时的频率误差,ASMO-PLL 和EPLL 的频率误差调节时间均需50 ms 左右,SOGI-PLL 需60 ms 左右,且出现了明显超调;ASMO-PLL 仅需1 ms 即可达到误差带,其他2 种方案则均需20 ms 左右,3 种方案产生的相位误差均为20°。
图7 中测试Ⅲ的幅值突变结果进一步验证了ASMO-PLL 的性能,频率误差可在24 ms 内趋于0,而EPLL 和SOGI-PLL分别需35 和47 ms;SOGIPLL 的超调达到2.3 Hz,ASMO-PLL 和EPLL 只有0.8 和1.0 Hz;在电压信号幅值扰动时ASMO-PLL约4 ms 归到误差带内,而EPLL 和SOGI-PLL 均需10 ms 左右;且ASMO-PLL 的超调最小为0.9°,而EPLL 和SOGI-PLL 分别为2.1°和1.7°。
综上,ASMO-PLL 在频率和相位估计收敛速度及精度方面都优于EPLL 和SOGI-PLL。表1 汇总了不同实验测试条件下3 种PLL 方案的性能对比,进一步说明了ASMO-PLL 具有的出色性能,可直接用于诸如电网同步或孤岛检测等电力设备并网的应用场景。

表1 测试结果汇总Tab.1 Summary of test results
3 结语
围绕单相电网电压信号的锁相跟踪问题,提出了一种基于自适应滑模观测器的新型PLL 方案。对比实验结果表明,即使在单相电网电压信号的相位、频率和幅值突变的情况下,新型PLL 算法也能提供准确而快速的相位频率锁定,算法的收敛速度快且易于实时实现,参数整定规则简单,是传统PLL 的较好替代方案。