带中点电位平衡的VIENNA 整流器反推控制研究
2021-10-10王君瑞贾思宁李学生
王君瑞,贾思宁,向 上,王 闯,单 祥,李学生
(北方民族大学电气信息工程学院,银川 750021)
随着电动汽车产业的快速发展,近几年来国家相继出台若干举措,大力推广电动汽车充电桩的建设。电动汽车充电桩主要由前级AC-DC 整流电路和后级DC-DC 降压电路构成,但当前大多数研究主要集中在后级DC-DC 如何实现充电控制规律、如何加快充电速度等方面,对前级引起的谐波污染还需要进一步引起重视[1],因此,研究高功率因数、高电能质量的前级整流器刻不容缓。
VIENNA 整流器作为一种三电平整流器拓扑,其电路结构简单,开关数量少,没有桥臂直通问题,而且电流谐波小,电压应力小,器件损耗低,功率密度高,适合大功率电路使用[2]。在航空电源、电动汽车充电机、风力发电、不间断电源及有源电力滤波器等领域正在逐步替代传统整流器作用[3]。但是,VIENNA 整流器的中点电位波动增加了整流器电路中功率器件的电压应力,降低了器件寿命以及运行的可靠性[4]。因此,研究VIENNA 整流器中点电位波动的控制方法非常关键。针对三电平拓扑固有的中点电位波动问题,国内外学者也做了大量研究。现在主要有2 种解决途径:一种是硬件方法,设计专门的外部电路,依靠Buck、Boost 特性来实现对中点电压的平衡控制;另一种是从软件的角度出发,不同的控制策略对应不同的中点电压平衡方法。例如基于空间矢量脉宽调制SVPWM(space vector pulse width modulation),利用冗余的小矢量调节其作用时间[5];基于单周期控制,在三相输入电流中注入三次谐波分量,消除中点电位波动[6];基于滞环电流控制,通过调节指令电流的直流偏移量实现直流侧中点电压平衡控制[7]等。
本文提出一种非线性的控制方法——反推控制,它不依赖于精确的数学模型,具有较好的抗扰能力。首先,介绍了VIENNA 整流器的拓扑,并建立其在d-q 坐标系下的数学模型,对反推控制算法进行了简单的描述,给出了以直流电压为控制目标的相关理论推导;其次,对本模型使用的基于两电平SVPWM 的简化调制技术进行简要介绍,并在此基础上通过调节冗余P、N 小矢量的控制时间,来实现对上、下电容电压的控制;最后,利用Matlab/Simulink 软件搭建仿真模型,验证控制策略的正确性和可行性。
1 VIENNA 整流器的数学模型及反推控制器的设计
1.1 VIENNA 整流器的数学模型
1994 年,J.W.Kolar 教授提出了一种新型的三电平整流器(VIENNA 整流器)拓扑。该拓扑由二极管整流器演化而来,三相交流源经过三相电感Ls及网侧电阻Rs,在a、b、c 三相输入端和直流母线电容中点各连接一个双向开关,形成三电平结构。双向开关由2 个带反并联二极管的IGBT 共发射极反向串联构成。
该电路是一种电流驱动型功率因数校正PFC(power factor correction)电路,功率开关管Sa1、Sa2、Sb1、Sb2、Sc1、Sc2两端的电压由其自身状态和输入电流方向共同决定。以a 相为例,若输入电流为正,则开关导通,开关管被箝位在直流侧正极,此时开关两端电压Uao=UC1=Udc/2;若输入电流为负,则开关导通,开关管被箝位在直流侧负极,此时Uao=UC2=-Udc/2;开关管关断,无论电流正负,开关管被箝位在直流侧中点O[8]。VIENNA 整流器主电路拓扑如图1 所示。
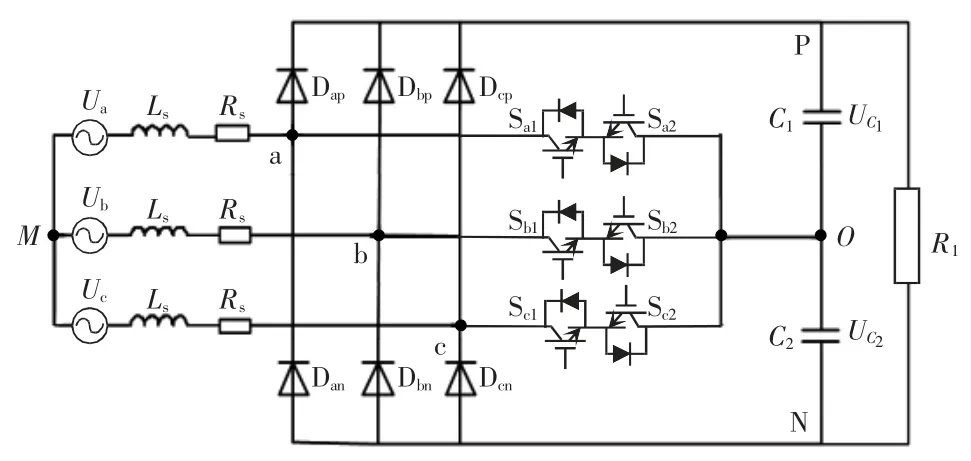
图1 VIENNA 整流器主电路拓扑Fig.1 Main circuit topology of VIENNA rectifier
当电网处于理想平衡状态时,VIENNA 整流器工作在连续电流模式。根据以上工作原理,省去推导过程,利用旋转坐标变换将abc 坐标系下的数学模型转化到d-q 坐标系下,两相同步旋转d-q 坐标系下VIENNA 整流器交流侧的电压方程[9]为
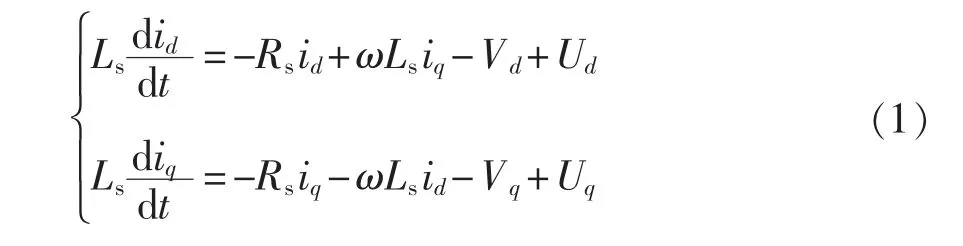
式中:Ls为交流侧输入电感;id和iq分别为d、q 轴电流分量;Rs为交流侧电阻;ω 为旋转角速度;Vd和Vq分别为d、q 轴电压实际控制量;Ud和Uq分别为三相电压在d、q 轴上的分量。
为实现直流电压的快速控制,若略去滤波器电阻和主电路的开关损失,交流侧输入功率应等于负载功率与电容充电功率[8],即

式中:Udc为直流侧电容电压;C 为上电容和下电容;Rl为负载侧电阻。
取电网电势矢量方向与d 轴方向重合,E 为单相电压,则Ud=E,Uq=0。在忽略网侧等效电阻的情况下,在d-q 坐标系下三相电压型VIENNA 整流器的方程[9]可以进一步表示为

1.2 反推控制器的设计
反推控制的设计过程是从输出量需要满足的期望值着手,将复杂的非线性系统分解成不超过系统阶数的子系统,然后为每个子系统设计部分Lyapunov 函数和中间虚拟控制量,一步步反推设计到整个控制系统,最后得到整个系统的控制器,从而实现系统的全局稳定[10]。VIENNA 整流器的目标是实现直流侧电压平衡和单位功率因数控制,因此定义直流侧电压跟踪误差e1=Udc-,其中,为直流侧期望输出电压。
假定id为虚拟控制函数,首先构造出Lyapunov函数,并对其求导,得


式中,k1为调整参数,k1>0。进一步可得虚拟控制函数为

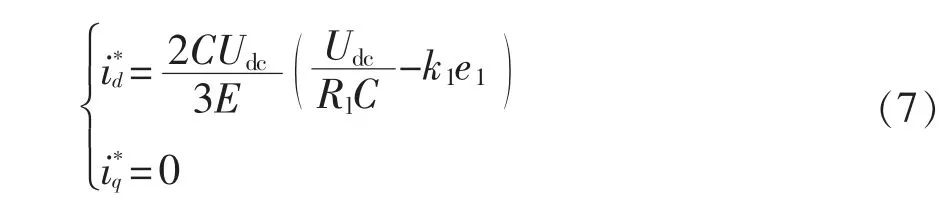
因此,若实现该虚拟控制函数,即可达到直流侧输出电压稳定跟踪给定电压的目的。为了实现三相VIENNA 整流器的电流控制,选择假定电流函数为
选择e2作为虚拟状态变量构成子系统。取d 轴电流的误差量为d 轴电流分量期望值。设置新的Lyapunov 函数,并对其进行求导得

式(8)中含有实际控制Vd,为了使其满足≤0,需令,调节参数k2>0,可得实际控制为

同理,选择q 轴电流的误差量e3=iq-,可以设计出其Lyapunov 函数,得其实际控制为

经过以上推导过程,反推控制调节参数k1、k2和k3,在理论上可根据具体的系统控制性能要求,进行参数优化设计,但过程较为复杂,因此一般根据经验试凑即可满足工程要求。首先给出反推控制一个电压(或电流)差值信号输入,有多个参数时先进行单个参数调节,其他参数值先设置为0,调节至满足目标的参数时再调节之。本文首先对电压反推控制调节参数k1进行调节,然后在k1的基础上调节k2和k3,进而完成反推控制方案的设计。VIENNA 整流器反推控制结构框图如图2 所示。

图2 VIENNA 整流器反推控制结构框图Fig.2 Block diagram of backstepping control structure for VIENNA rectifier
2 基于两电平SVPWM 的VIENNA整流器调制策略
现有的简化算法,主要围绕两种思路对算法进行改进:一种思路是通过适当分解参考电压矢量来实现简化计算的目的;另一种是通过选取恰当的坐标系对参考电压矢量进行分解计算[11]。
本文采用的是一种基于两电平SVPWM 的三电平空间矢量简化算法。首先判断参考矢量落在哪个小两电平区域,然后判断具体落在小两电平区域中的哪个小扇区。所有电压空间矢量可以分类为零矢量、小矢量(内六边形的顶点)、中矢量(外六边形边的中点)和大矢量(外六边形的顶点),零矢量和小矢量都有冗余开关状态,如图3 所示。
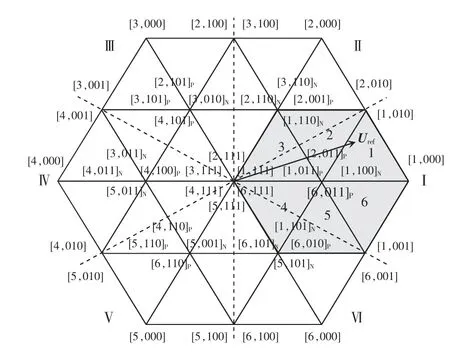
图3 电压空间矢量Fig.3 Voltage space vectors
2.1 小两电平矢量区域的判断
VIENNA 整流器每相桥臂都有3 个状态,因此共产生27 种可能的桥臂开关状态,由于“2 2 2”及“0 0 0”不能同时出现,故有效状态剩余25 种,可产生19 个电压矢量。当桥臂状态为2 和0 时,对应开关管状态为0;当桥臂状态为1 时,对应开关管状态为1。
首先判断电压矢量落在哪个区域内,如图3 中可被分为6 个类似阴影区域I 的小两电平矢量区域,可参考文献[5]对所属区域进行判定。
2.2 作用时间计算
根据空间矢量分类,小矢量(即内六边形的6个顶点)为6 个小两电平区域的中心矢量。如图3中阴影部分为参考电压矢量Uref落入第I 扇区时对应的两电平空间矢量,将该两电平区域的各矢量(如图4 中Uref)投影到abc 坐标系下的电压幅值,分别减去中心矢量投影到abc 坐标系下的电压幅值,此时得到的各矢量(如图4 中)即为两电平下的修正参考电压矢量[12]。其他区间以类似此原理进行修正,并根据两电平判断扇区的方法对小两电平区域中矫正后的电压矢量所处扇区进行判断[2]。

图4 第I 扇区分解的两电平空间矢量Fig.4 Decomposed two-level space vector in sector I
结合各矢量修正后的矢量幅值,由此计算得到VIENNA 整流器功率器件导通时间为
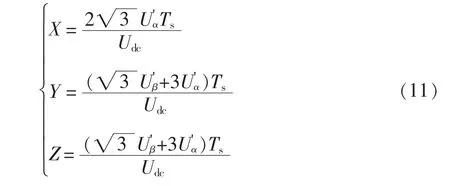
式中:Ts为开关周期;和分别为修正后的α-β坐标系电压。Tx和Ty为相应电压空间矢量的导通时间,本文使用七段式SVPWM 对两电平各扇区中的Tx和Ty赋值[13]。根据对应扇区得到Tx和Ty后,再对其进行饱和判断。若Tx+Ty>Ts,则取

否则,Tx和Ty维持原值不变。
结合式(12)可以计算得到各矢量作用时间切换点ta、tb、tc,即

2.3 对矢量进行反修正
得到两电平区域的各个矢量后,加上各扇区I~VI 对应的N 型小矢量(100,110,010,011,001,101)即可得到VIENNA 整流器的桥臂状态。因此,可得VIENNA 整流器参考电压矢量Uref落入第I(1)扇区时对应桥臂状态矢量作用顺序,如图5 所示。得到桥臂状态后,对应式(11)可以得到VIENNA 整流器各桥臂开关管状态。
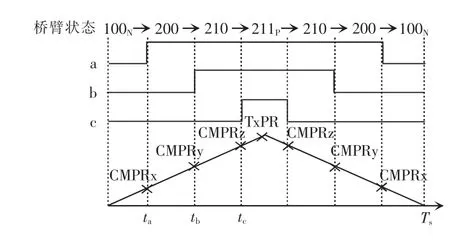
图5 开关作用顺序Fig.5 Switching sequence
3 中点平衡控制方法
中点不平衡分为两类:中点电位偏移和中点电位波动。中点电位偏移是由于流入、流出中点的电荷量不相等造成的中点电位偏移[14]。中点电位波动主要考虑电压矢量影响,其中大矢量对应的开关状态使三相输入侧和直流侧正、负极相连,零矢量使负载短路,都不会引起中点电压的变化;小矢量和中矢量,三相输入中至少有一相连接到上、下电容中点,并且和直流侧正、负极形成电流,导致电容充、放电,使中点电压产生波动[15],把这种波动控制在适当范围内,整流器才能正常工作。
中矢量和小矢量对中点电位平衡均有影响,但是中矢量冗余度为1,无法利用。冗余小矢量成对出现,但是由于产生中点电流的方向不同,故产生的中点电压影响正好相反。本文利用冗余小矢量的这种性质,通过调整小矢量作用时间,从而实现中点电压平衡控制[16]。小矢量的作用时间可以分成tP和tN两部分,分别表示为

式中:ΔT 为时间调整量;ta为矢量作用切换点。本文通过检测直流侧两电容电压差值,形成闭环反馈控制,来调整式(14)中的ΔT,使得中点电压控制在预期范围内,即

式中:ΔUref为直流侧两电容压差期望值;Km为调整系数;UC1为上电容电压;UC2为下电容电压。当上、下电容电压差值为正时,ΔT>0,将N 型小矢量作用时间增大,则中点电位降低;当上、下电容电压差值为负时,ΔT<0,将P 型小矢量作用时间减小,则中点电位增加。通过调节Km的取值来控制电压差的调节速度,并将ΔT 限制在-0.95~0.95 之间,避免ΔT过大造成矢量切换过程中的电压跳变。如果只追求快速性,可取Km=1,但是tP、tN的重新分配会使七段式脉冲宽度不对称,频繁的时间变换会使输出电压的谐波含量增加,所以实验过程中需要平衡两者的关系选取适当的Km值。
4 系统仿真与结果分析
为验证分析的正确性,在Matlab/Simulink 中,搭建了以VIENNA 整流器为拓扑的带中点平衡的反推控制仿真平台。VIENNA 整流器的部分参数为:三相交流相电压e=100 V,电网频率f=50 Hz,输入电感L=3 mH,输入电阻为0.1 Ω,直流侧期望电压Udc=200 V,直流侧上、下电容均为6 000 μF,负载电阻为15 Ω,仿真波形如图6 和图7 所示。
4.1 中点平衡和未加中点平衡下直流电压对比
从图6(a)和(b)可以看出,PI 控制下无中点平衡,两电容电压差值ΔUdc会逐渐增大,且在1.4 s负载由15 Ω 突变至10 Ω 时,电压会发生大幅度跌落;在PI 控制加入中点平衡之后,上、下电容电压差值几乎为0。从图6(c)和(d)可以看出,在相同的控制方式下,无中点电位平衡,压差较大,在中点平衡控制作用下,两电容电压快速调整至期望电压值,压差几乎趋近于0,且在电阻突变后带有中点平衡的反推控制比带有中点平衡的PI 控制电压波动更小。

图6 PI 控制和反推控制下直流侧两电容电压仿真波形Fig.6 Voltage simulation waveforms of two capacitors on DC side under PI control and backstepping control
4.2 PI 中点平衡和反推中点平衡的电流对比
图7 为PI 中点平衡控制下和反推中点平衡控制下负载在15 Ω 和10 Ω 之间突变时的d-q 电流仿真波形。由图7 可以看出,系统有功电流id在电阻突然减小后快速增大,但无功电流iq一直为0,表明系统具有良好的动态性能,且反推控制下的d轴电流在受到扰动时系统的响应速度更快。
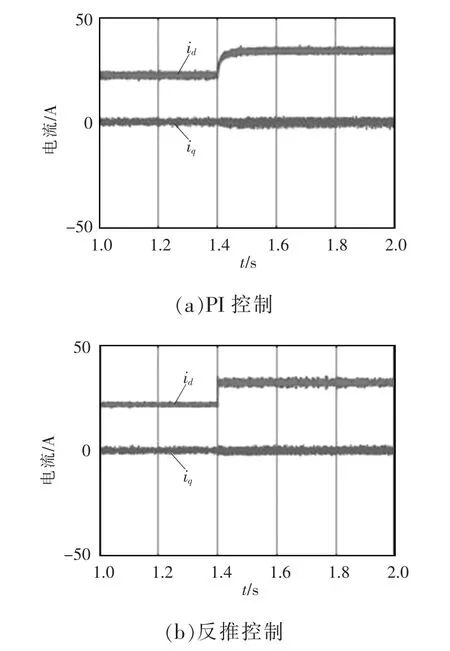
图7 中点电位平衡时PI 控制与反推控制下的d-q 轴电流仿真波形Fig.7 Simulation waveform of d-q axis currents under PI control and backstepping control in the case of neutral-point potential balance
不同控制方法输入、输出性能对比如表1 所示。由表1 可知,经过中点电位平衡调节之后,THDi 有所减小,且在相同的系统参数下,反推控制有更加优越的性能,达到了国家对于整流器网侧电流谐波小于等于5%的控制要求。

表1 不同控制方法输入、输出性能对比Tab.1 Comparison between input and output performance of different control methods
通过上述仿真结果及性能参数对比可以发现,PI 控制和反推控制下的VIENNA 整流器均能工作在高功率因数状态。直流外环PI 控制使系统在负载突变时能快速恢复至直流给定值,让系统具有优良的输出性能。反推控制替代了双闭环控制所需要的PI 调节器,系统有更好的稳定性和更快的响应速度,直流输出电压在负载突变情况下具有更好的鲁棒性。中点电位平衡有效地将上、下电容电压控制在适当的波动范围内,实现了直流侧上、下电容电压的平衡。
5 结语
通过对VIENNA 整流器工作原理的分析,建立了d-q 坐标系下的数学模型。由于系统具有非线性和强耦合的特点,本文采用反推控制策略和SVPWM 方法,完成传统PI 与反推控制的直流电压和d-q 轴电流对比,验证了其有效性,增加了输出直流电压的稳定性,改善了电流谐波,提高了网侧功率因数。通过调节P、N 小矢量的作用时间,来实现负载侧上、下电容电压平衡,证明了本文所用策略的有效性和优越性。